功能性电刺激下的关节自适应运动控制研究
2017-01-10吴强张琴熊蔡华
吴强 张琴 熊蔡华
功能性电刺激下的关节自适应运动控制研究
吴强1张琴1熊蔡华1
针对功能性电刺激(Functional electrical stimulation,FES)下外部干扰和肌肉疲劳对关节运动的影响,提出了一种神经网络自适应滑模控制方法以获得更加精确的关节运动.本文建立了电刺激下的关节运动模型,在此模型的基础上设计了滑模控制律,利用径向基神经网络在线逼近系统不确定特性,并通过Lyapunov方法设计了径向基神经网络的自适应律,以电刺激所产生的膝关节运动控制为例,通过仿真和实验研究验证了该神经网络滑模控制方法相对于传统的滑模控制来说,不仅可以准确地控制电刺激而获得期望的关节运动,而且当关节运动受到外部干扰和肌肉疲劳的影响时,还可自适应地对此进行补偿,有效地调节电刺激强度以获得准确的关节运动.
神经网络滑模控制,肌肉疲劳,运动控制,功能性电刺激
DOI10.16383/j.aas.2016.c160217
功能性电刺激(Functional electrical stimulation,FES)是利用微小的电脉冲序列诱发肌肉收缩,重建肢体运动功能的神经康复技术之一[1−2],主要用于因中风和脊髓损伤等神经损伤性疾病导致肢体运动功能丧失的患者的运动功能重建.相比其他康复技术,FES还有助于促进血液循环,防止肌肉废用性萎缩,促进肌肉再学习,具有不可估量的研究价值[3−4].然而,目前商业化的FES康复系统仍然存在着诸多问题与挑战,例如人体肌肉骨骼系统是一个高度非线性的时变系统,加之肌肉疲劳、痉挛和个体差异性等内外干扰因素的影响,导致FES控制系统在多次重复后运动控制精度较低,甚至无法完成预期运动,康复效果大打折扣[5].
肌肉骨骼系统的干扰因素主要有因肌肉痉挛、震颤、目标肌肉之外被激活肌肉产生的力矩以及环境对肢体运动的干扰等.肌肉疲劳会导致肌肉收缩产生肌力的能力下降,相对于神经冲动的刺激而言,外部电刺激下因肌纤维募集顺序相反等原因而更容易产生疲劳[6].因此,在设计FES控制系统时,为提高重复运动的控制精度,肌肉骨骼系统的内外干扰因素和肌肉疲劳是两个必须面对的难题.国内外学者对此进行了大量的研究,取得了很多重要的成果[7−15].为验证干扰和疲劳对FES控制系统的影响,Lynch等通过仿真研究了PID(Proportion integration diferentiation)、增益调度控制和滑模控制三种控制器在不同程度的痉挛、肌肉疲劳等扰动下的控制效果,结果显示在高度痉挛和疲劳下PID和滑模控制甚至无法完成预期运动[16]. Qiu等利用遗传算法和神经网络在线调整PID控制器的参数,控制健康受试者膝关节的屈伸运动,具有响应快速和跟踪精度高的优点,但实验过程中没有验证控制系统抗干扰和疲劳的能力[17].
滑模控制能够很好地应对系统非线性、模型不确定和干扰等情况,在FES控制中被广泛应用[18−20].其原理是根据系统当前状态切换控制律,迫使系统向预定的滑动模态运动,当系统进入该模态后将不受控制对象参数变化和外部干扰的影响.但是,由于实际系统存在惯性和控制延时的影响,系统状态将穿越滑模面,产生抖振,降低滑模控制的性能[21−22].设计控制器时常采用边界层法消除或削弱抖振,即在边界层外采用滑模控制,在边界层内采用线性化反馈控制;然而,这种方法在系统模型参数不准确及存在扰动时会产生稳态误差,并不能保证系统状态收敛到滑模面.Ajoudani等利用神经网络代替切换控制以消除抖振,并设计另一神经网络估计系统未建模部分,与滑模控制相结合,能够很好地补偿外部干扰、参数时变和肌肉疲劳的影响[19];但是,利用梯度下降法设计神经网络参数适应律容易陷入局部最优,不能保证闭环系统的全局稳定性[23].
为消除电刺激下外部干扰和肌肉疲劳对膝关节运动控制的影响,本文根据电刺激下膝关节的运动模型提出了一种神经网络自适应滑模控制方法,利用径向基(Radial basis function,RBF)神经网络来在线跟踪系统未建模部分和参数辨识误差,并通过Lyapunov方法设计RBF网络的自适应律,确保系统的稳定性.通过仿真和FES实验验证,本文提出的控制方法不仅可以准确地控制电刺激而获得期望的关节运动,而且当关节运动受到外部干扰和肌肉疲劳的影响时,还可自适应地对此进行补偿,有效地调节电刺激强度以获得准确的关节运动.
1 关节运动模型
膝关节是人体非常重要的关节,它涉及到行走站立等日常功能性运动,常被当作FES的研究对象.本文以膝关节运动控制为例,讨论了电刺激下关节运动的自适应控制问题.如图1所示,假设受试者坐在高椅上,身体保持直立,大腿固定不动,并将小腿和脚视为一个整体,则膝关节的运动可简化为小腿绕膝关节的摆动.则该系统的动态平衡方程[24−25]为
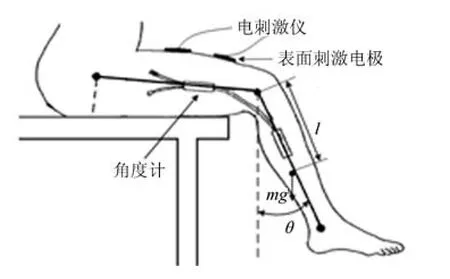
图1 实验示意图Fig.1 Experimental set-up

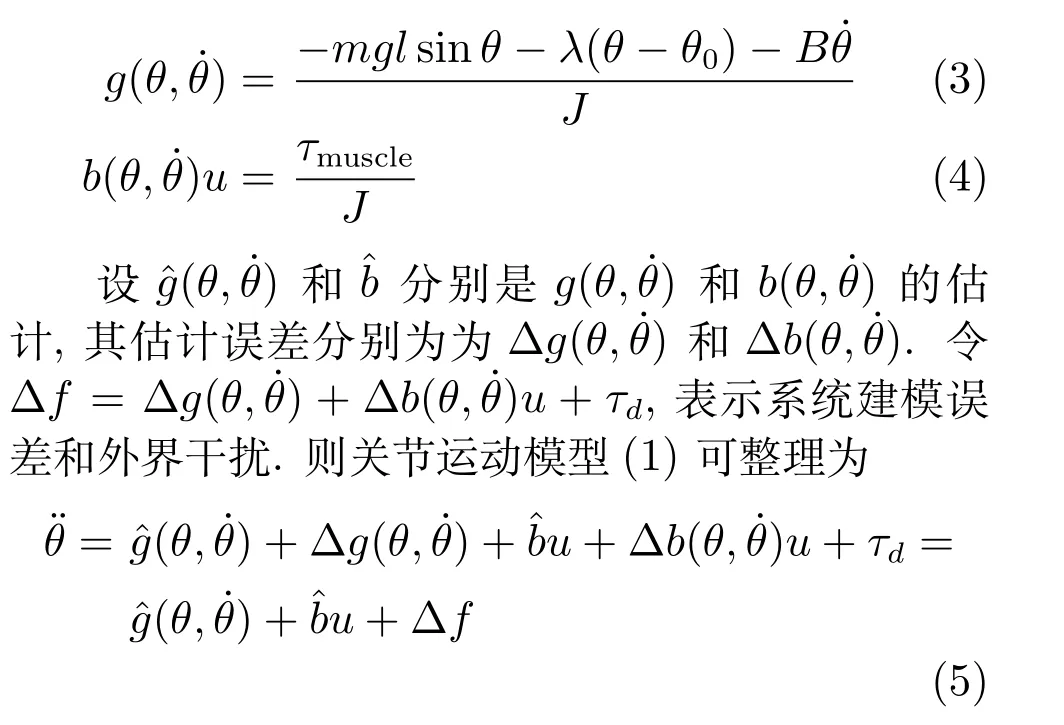
其中,J为小腿及脚的转动惯量,代表膝关节的角度、角速度和角加速度,m为小腿质量,g为重力常数,l为质心到膝关节中心的距离,λ为弹性系数,θ0为休息状态的参考角度,B为粘滞系数,τd为系统扰动,τmuscle为肌肉收缩产生的力矩.文中与角度θ有关的变量均随时间变化,为书写简洁,均省略后缀(t)的说明.
电刺激下肌肉收缩产生力矩是一个复杂的过程,包括肌纤维在电刺激下的募集过程,细胞膜内外钙离子动态转移和肌肉收缩等过程.其力矩的大小与关节角度、角速度、当前肌肉状态和电刺激强度有关[24],可描述为

其中,u(t)代表施加在股四头肌上的电刺激;fat(t)代表归一化的肌肉疲劳水平;描述了疲劳情况下肌力衰减的程度;代表施加电刺激强度u(t)和该电刺激诱发肌肉收缩产生的力矩之间的映射函数,包括角度-力矩特性、角速度-力矩特性和肌肉收缩的动态特性,具体数学形式请参考文献[25].
2 神经网络滑模控制器设计
基于上节所建立的膝关节运动模型,本节首先设计了等效滑模控制器,然后针对该控制方法存在的问题进一步提出了神经网络自适应滑模控制方法.该方法利用RBF网络来在线跟踪系统建模误差和干扰,通过自适应律实时调整网络权值,提高系统的跟踪精度.为便于控制器的设计分析,令:
2.1 滑模控制器设计
在滑模控制器设计中,我们将∆f当作干扰项处理,令其中F为∆f的上界,满足F≥|∆f|.
取切换函数s=+ξ·e,其中e=θd−θ为角度误差,θd为期望的关节角度,ξ为滑模系数.则


取Lyapunov函数

对式(8)求导,并将式(6)代入可得

2.2 神经网络自适应滑模控制器设计
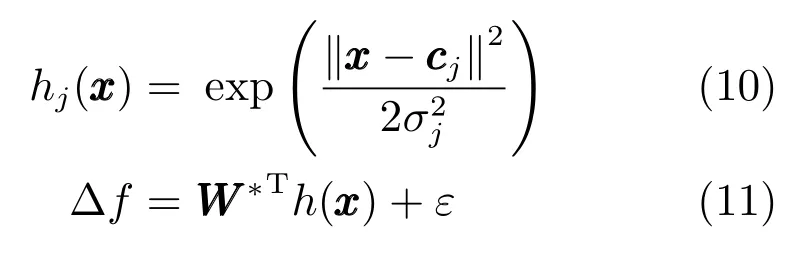
事实上,我们难以对F进行精确的估计,对其保守估计将使切换增益k增大,进而导致系统抖振增大.故本文考虑采用RBF神经网络对∆f进行估计.由于∆f与辨识误差、肌肉疲劳和外部干扰等因素相关,存在时变随机的特性,这会导致离线训练好的神经网络随着实验的进行,逼近效果越来越差.因此,本文用RBF网络在线学习的方法实时估计∆f,保证系统抗扰动和疲劳的性能.控制系统结构如图2所示,本文利用Lyapunov方法设计RBF网络的自适应律,根据当前状态实时调整网络权值[26],以实现RBF网络在线学习的目的.
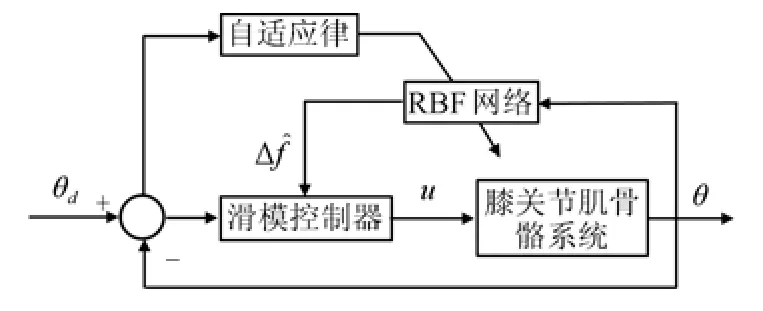
图2 神经网络滑模控制控制系统Fig.2 Structure of neuro-SMC control system
RBF神经网络的算法为
取系统控制律为
对式(14)求导,并将式(6)、(11)和(13)代入得:
在此基础上,本文采用边界层法削弱控制器输出所产生的高频震动,即用连续的饱和函数sat(s)代替不连续的符号函数sgn(s),如式(18)所示.
其中,φ为边界层厚度.
3 膝关节运动控制仿真验证
上节设计的两种控制方法的主要区别在于对∆f的处理.采用边界层法的滑模控制(Sliding mode control,SMC)将∆f作为干扰项处理,这导致了SMC控制存在稳态跟踪误差,其误差大小与∆f有关,即与参数辨识误差、建模误差、外部干扰和肌肉疲劳有关.神经滑模控制(Neuro-SMC)则是将∆f作为已知项处理,利用RBF网络对∆f进行在线估计,因此具有更优秀的抗疲劳和抗扰动的能力.
为比较验证所提出的两种控制方法对外部干扰和肌肉疲劳的自适应补偿能力,本节设计了3组仿真进行验证,分别为稳态响应仿真、扰动仿真验证和疲劳仿真验证.仿真实验在Matlab/Simulink平台下进行,仿真步长为40ms.仿真采用的受控对象模型采用第1节所建立的膝关节数学模型.受控对象的部分参数如下所示.
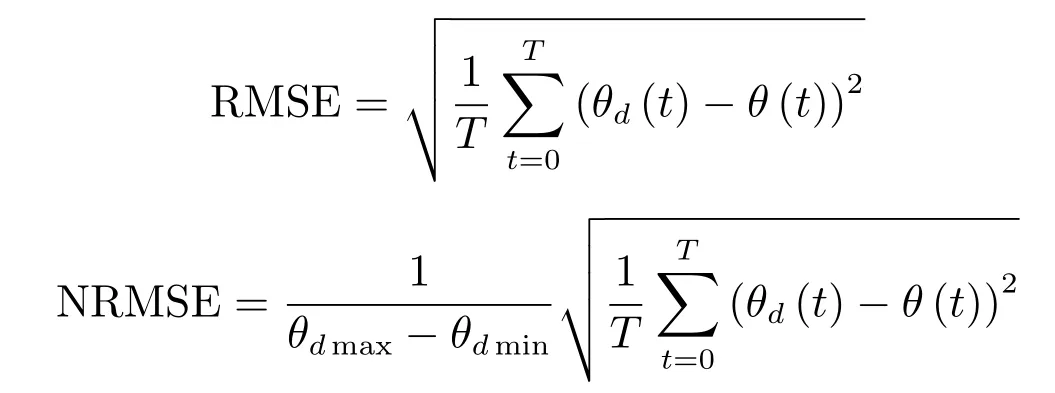
采用均方根误差(Root mean square error, RMSE)和归一化均方根误差 (Normalized root mean square error,NRMSE)作为膝关节角度跟踪精度的评价指标,若无特别说明,下文中的关节角度跟踪误差,将统一用RMSE(NRMSE)的形式进行表述.计算方法如下:
常规滑模控制和神经滑模控制的参数值在以下仿真实验中保持不变,SMC控制的参数取值如下:

Neuro-SMC控制中,RBF网络采用5个隐含神经元,其控制参数取值如下:
3.1 稳态响应仿真验证
该仿真旨在验证两种控制策略对参数辨识误差和建模误差的处理能力,暂不考虑干扰和疲劳.仿真以阶跃信号(45°)作为参考轨迹,来分析两种控制器的稳态响应性能;在仿真过程中,受控对象的参数m,J,λ,B在标称值上下10%内随机变化,系统也存在一定的未建模项.图3记录了两种控制器的角度响应、脉宽输出以及角度跟踪误差.由图3可知,SMC控制器稳态时关节角度的跟踪误差为2.28°(5.01%),存在明显的稳态误差. Neuro-SMC控制器稳态时关节角度的跟踪误差为0.39°(0.87%),稳态误差可忽略不计,这是因为神经滑模控制可以通过RBF神经网络补偿建模误差.受控对象参数时变对两种控制器的性能影响也较小,稳定后实际关节角度在期望值±1.5°内波动,但是从控制输出来看,Neuro-SMC控制的脉宽波动幅度也明显小于SMC控制.以上两点表明,神经滑模控制在系统存在建模偏差和参数辨识误差时的稳态响应性能优于常规滑模控制.
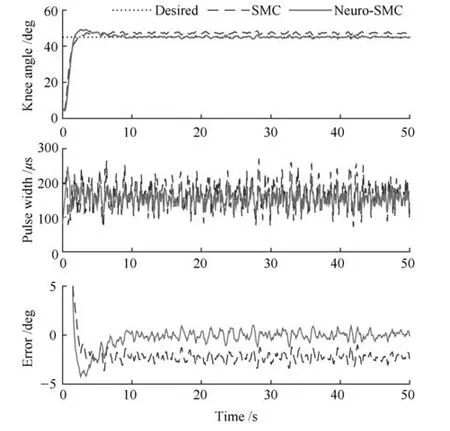
图3 稳态响应仿真结果Fig.3 Simulation result of steady-state response
3.2 FES扰动仿真验证
该仿真旨在验证两种控制策略抗干扰的能力.在电刺激过程中,存在着诸多内外干扰因素,比如受试者自主收缩、电极及传感器位置变化、实验环境变化等,故分析控制器抗扰动能力是非常必要的.该仿真实验不考虑参数时变以及肌肉疲劳的影响,仅分析系统抗干扰性能.仿真以正弦信号(y=30+20sin(t−1.57))为参考轨迹,并在20s时施加3 Nm(相当于肌肉收缩产生的最大力矩的30%,此干扰力矩也可使用不确定量)的干扰力矩,来比较两种控制器的抗扰动性能.图4记录了扰动下两种控制器的角度响应、脉宽输出以及角度跟踪误差.由膝关节角度跟踪曲线可以看出,在施加扰动后神经滑模控制经过3s左右的调整后,仍可以准确地跟踪期望轨迹,电刺激脉宽也自适应地增大;而常规滑模控制经调整后在正弦轨迹波峰处角度跟踪误差最大(15.6°),脉宽增大不明显.计算可知,整个过程中神经滑模控制器的角度均方根误差为3.86°(9.7%),常规滑模控制器的跟踪误差为7.14°(17.9%).因此,在存在扰动的情况下,本文提出的神经滑模控制器能够自适应地调节电刺激强度,补偿干扰对运动控制精度的影响.
3.3 FES疲劳仿真验证
该仿真旨在验证两种控制策略对参数辨识误差和建模误差的处理能力.肌肉疲劳会导致肌肉收缩产生肌力的能力减弱,导致肢体无法完成预期的运动.肌肉疲劳对肌肉收缩的动态特性存在着多方面的影响,为简化仿真过程,假定疲劳仅影响肌肉产生力矩的大小[24−25].在仿真实验中,令肌肉力矩随时间逐渐衰减,最大衰减至正常肌力水平(不考虑肌肉疲劳时肌肉产生的力矩)的60%(fat=0.6+0.4e−0.05t),并通过正弦响应(y=30+20sin(t−1.57))观察疲劳补偿情况.图5记录了肌肉疲劳下两种控制器的角度响应、脉宽输出以及角度跟踪误差.由图5可知,随着疲劳程度不断增大,常规滑模控制的跟踪误差不断增大,最大跟踪误差为11.9°,角度均方根误差为4.52°(11.3%);而神经滑模控制能够根据疲劳程度自适应调节电刺激脉宽以保证跟踪精度,其角度均方根误差为3.33°(8.3%).因此,在脉宽容许范围内,神经滑模控制能够有效地补偿因疲劳产生的肌力衰减.
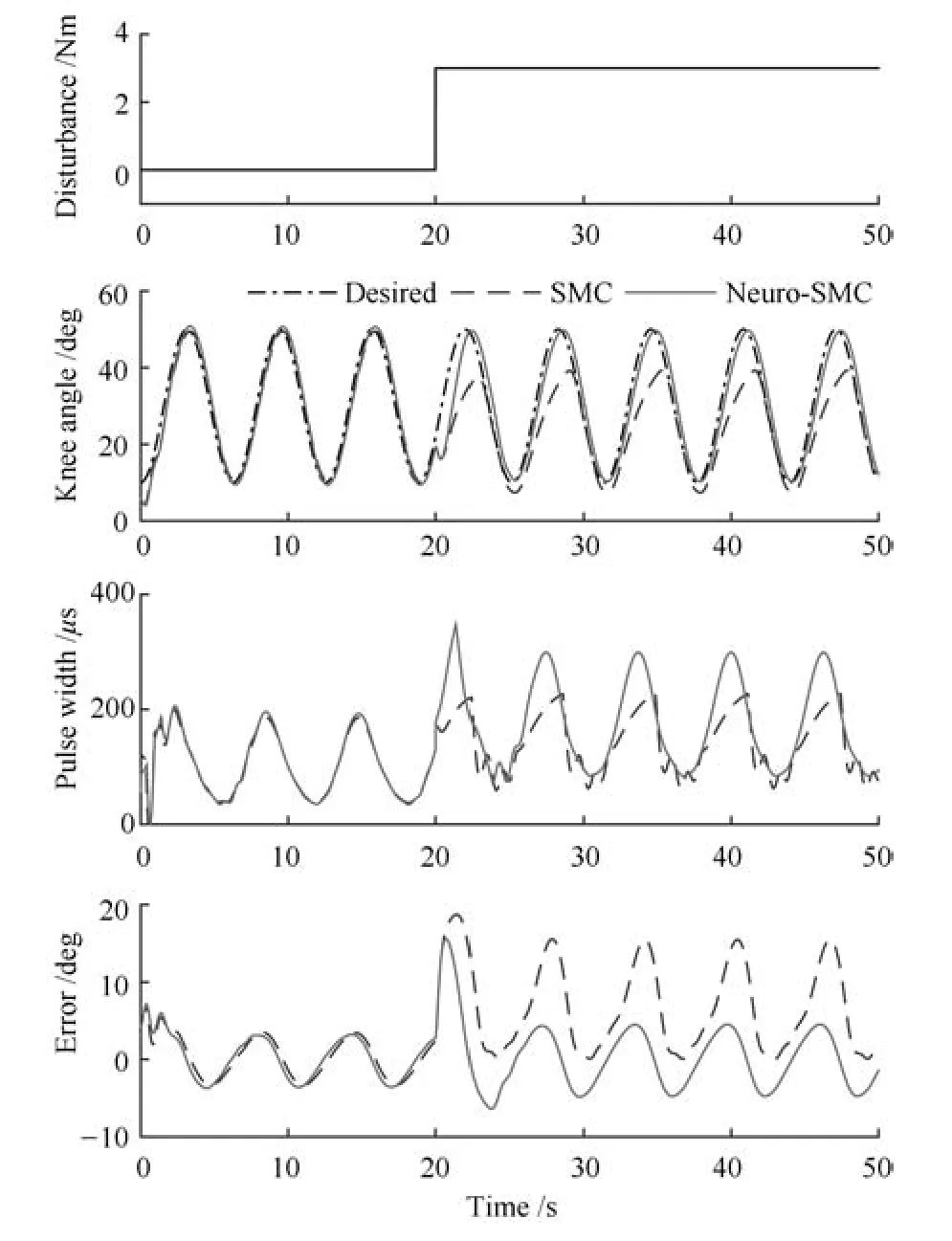
图4 扰动仿真结果Fig.4 Simulation result of disturbance test
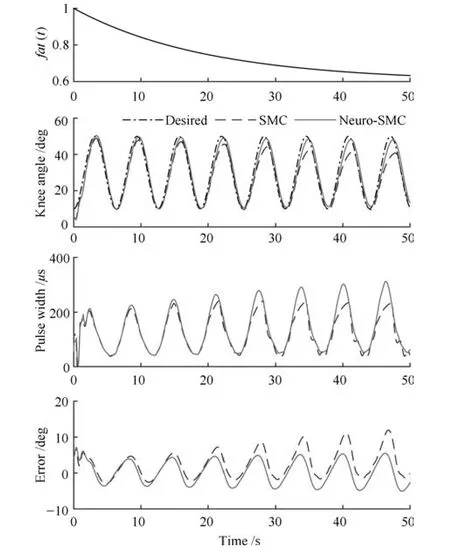
图5 疲劳仿真结果Fig.5 Simulation result of muscle fatigue test
4 膝关节电刺激实验验证
4.1 实验方案
实验采用功能性电刺激仪(RehaStim2,HASOMED,Germany)通过粘贴式表面电极(5 cm×9 cm)刺激股四头肌,并利用应变式角度计(SG150, Biometrics Ltd,UK)测量膝关节的角度.实验过程如图6所示,受试者坐在实验桌上,上身保持直立,小腿自然下垂并保证在摆动过程中不触碰地面;正负表面电极粘贴在受试者股直肌上方,两者相隔约8 cm;角度计按使用说明粘贴在膝关节外侧,并进行标定.为确保受试者的安全,在实验前需确定受试者可接受的最大电刺激强度.实验采用脉宽调制,即维持恒定的频率和电流幅值,通过调节电刺激脉宽来改变电刺激的强度.具体电刺激参数为频率25Hz;幅值20mA;脉宽50~450µs.实验过程中,受试者尽量放松,避免自主肌肉收缩的情况.
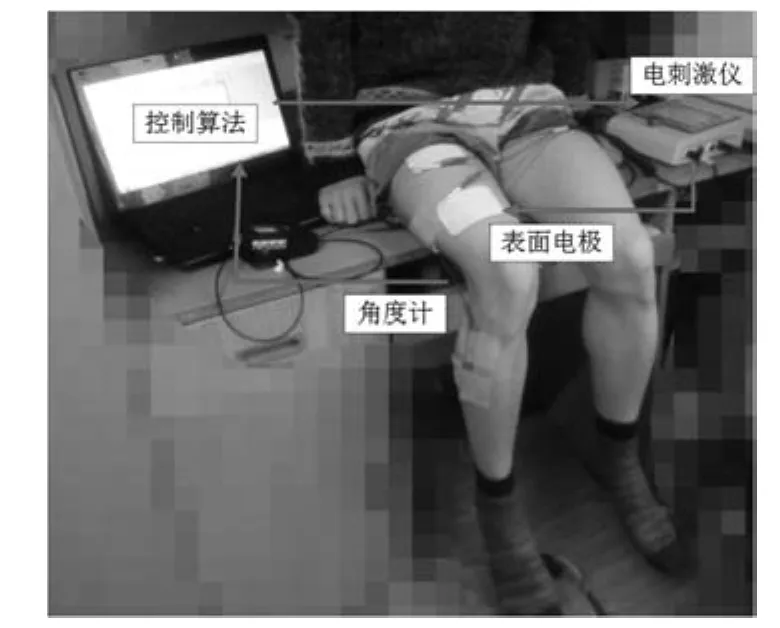
图6 膝关节电刺激实验图Fig.6 Experiment set-up
FES实验与仿真类似,分别从稳态响应实验、扰动实验和疲劳实验三个方面验证控制器的跟踪性能.由于大腿中线与水平面并不平行,在最大电刺激强度下受试者膝关节最大伸展角度约为60°;为保证扰动和疲劳实验顺利进行,实验选定(0°,50°)为小腿的摆动区间.并选定阶跃信号(35°)和正弦信号y=25+15sin(t−1.57)作为期望运动轨迹.
两种控制器的控制输出频率与电刺激频率一致,均为25Hz;其参数值在三组实际实验中保持不变, SMC控制器的参数取值如下:

Neruo-SMC控制器中RBF网络的隐含层神经元个数和参数与仿真中的RBF网络参数一致,其他控制器参数取值如下:

4.2 实验结果
4.2.1 膝关节模型参数辨识
在进行闭环控制实验之前,先开展参数辨识实验,待辨识的参数有参数辨识分为三部分:1)测量受试者的身高体重,通过二元回归方程估计计算其小腿质量m、质心位置l和转动惯量J[27];2)在无电刺激情况下让小腿自由摆动,利用最小二乘法辨识膝关节运动模型的粘弹性等参数[28];3)保持电脉冲幅值和频率恒定,并以50µs的增幅逐步增大脉宽(50µs~450µs),每个幅值维持3s,根据式(1)计算各脉宽值下的肌肉力矩,确定肌肉静态增益b的范围,并取表1为测量和辨识得到的参数值.图7为自由摆动实验测量角度与模型预测角度的对比.由图7可知,摆动的最低点和最高点存在一定的误差,这可能是采用线性模型来拟合膝关节阻尼特性导致的;但是,膝关节运动模型预测的角度数据能够在大范围内准确拟合摆动实验得到的角度数据,角度均方根误差为1.69°.电刺激过程中坐姿、电极及角度计粘贴位置的变化,会造成膝关节模型参数的波动.但是在第3.1节的仿真实验中,已经验证参数波动±10%对系统跟踪性能影响可忽略不计.因此,可认为参数辨识结果较为准确.
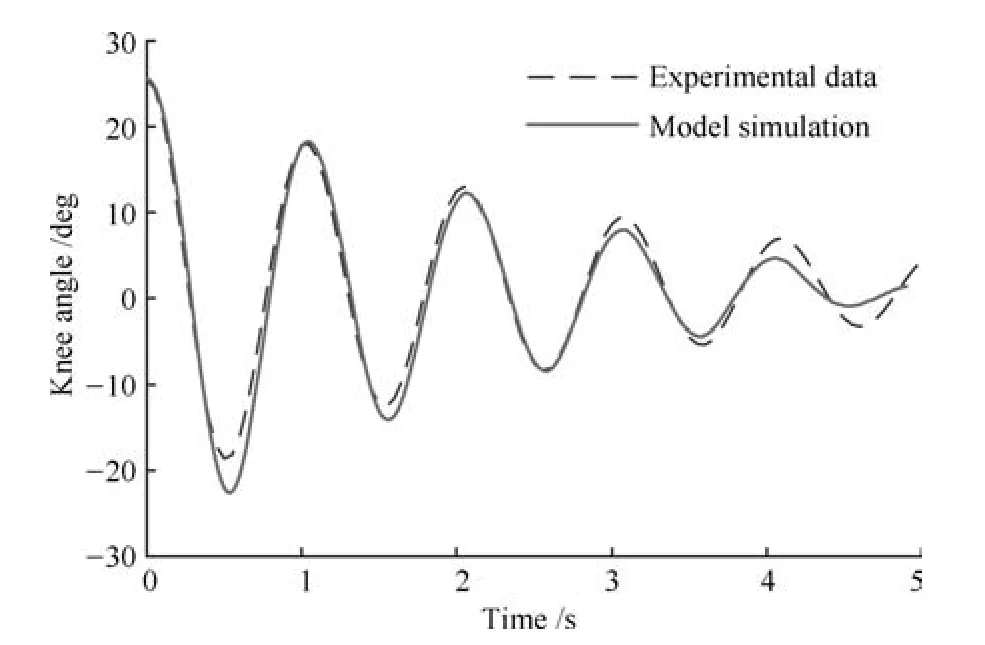
图7 自由摆动测试结构验证Fig.7 Identifcation result through freely swing test
4.2.2 稳态响应实验结果
该实验通过跟踪阶跃信号(35°),来分析两种控制器在系统存在建模误差和未建模部分时的稳态跟踪性能,此实验不考虑外部力矩和疲劳的影响.图8记录了两种控制器阶跃响应的结果.由图8可知,常规滑模控制上升时间为1.5s,存在明显的稳态误差,5s~20s的角度均方根误差为9.92°(28.3%).神经滑模控制的上升时间2.0s,响应快速,5s~30s的均方根误差为1.05°(3.0%),具有较好的跟踪精度,而且角度波动幅度较小.由于肌肉收缩的动态响应函数实际是一个存在饱和与死区的非线性时变函数,常规滑模控制需采用较大的切换增益k,才能在实验初始阶段产生超过死区的电刺激强度,诱发受试者小腿运动;但是k的增大会造成更大的抖振以及脉宽波动,使受试者感到不适.考虑到常规滑模控制存在稳态误差以及抖振较大,下述实验不再考虑常规滑模控制,以缩短实验时间,避免受试者产生厌倦.
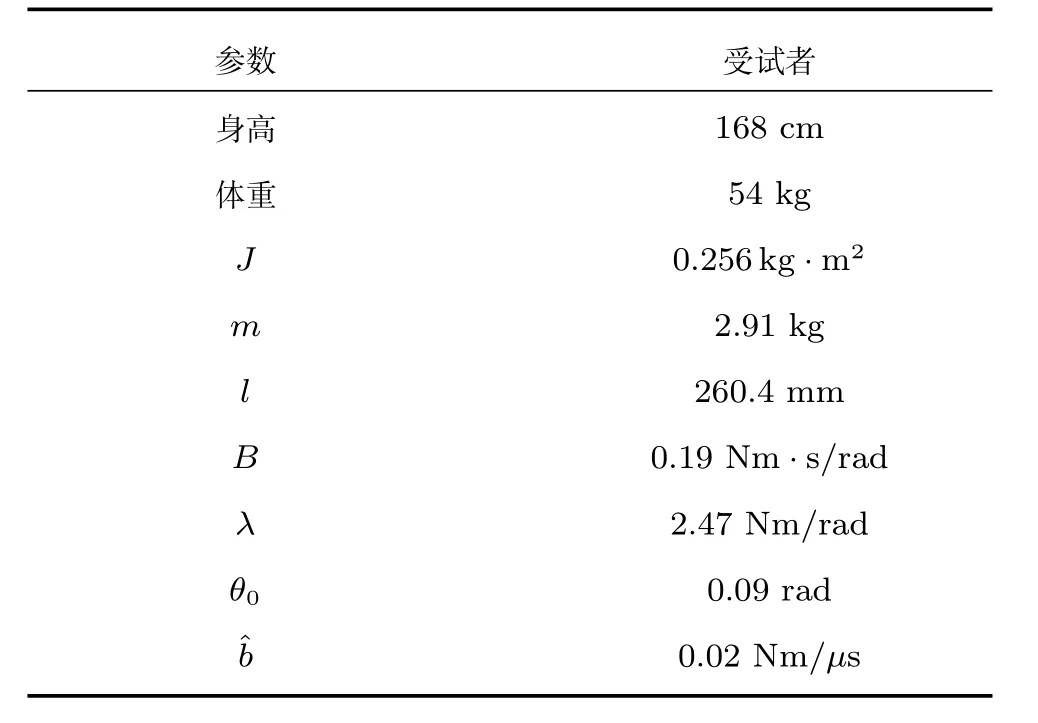
表1 膝关节模型参数Table 1 The parameters of knee joint model
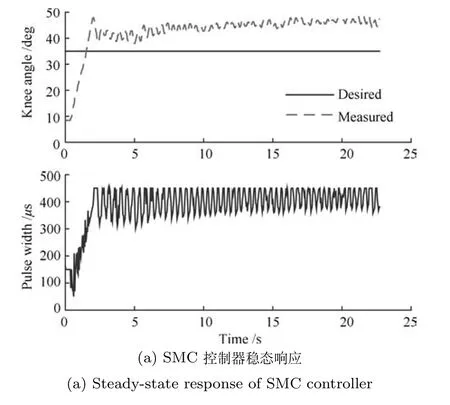
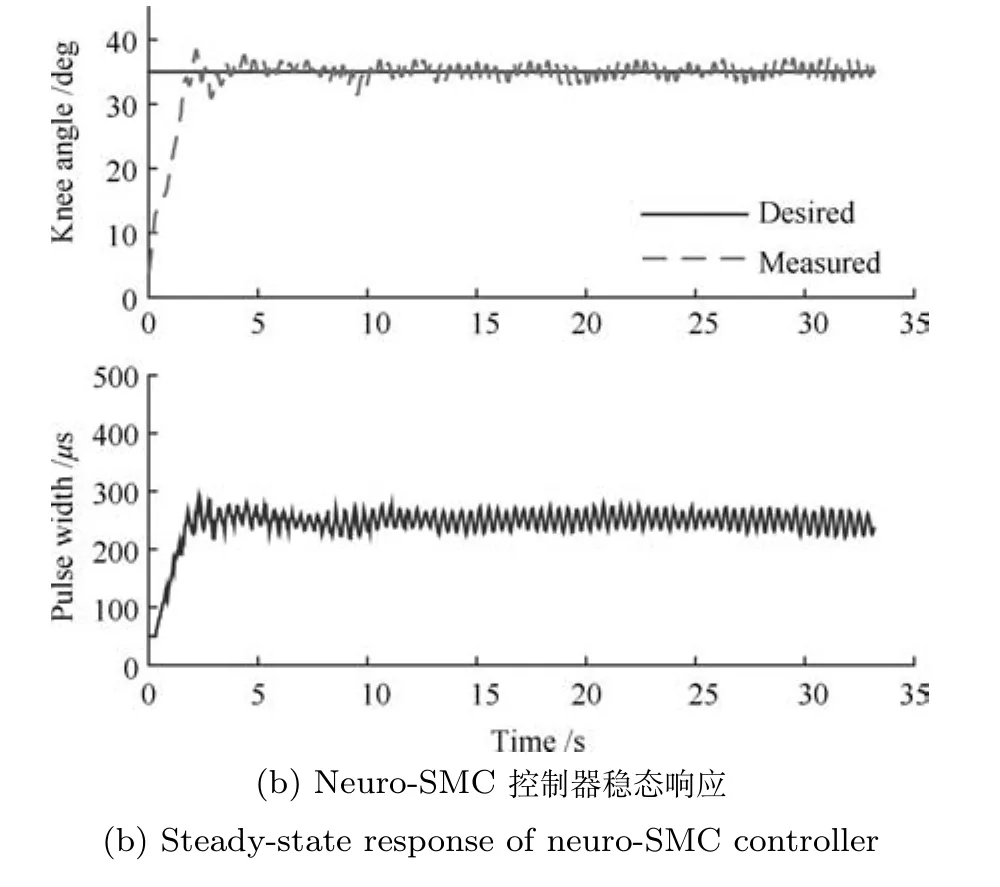
图8 稳态响应实验对比Fig.8 Experimental comparison of steady-state response
4.2.3 FES干扰实验
本实验通过跟踪阶跃信号(35°),以验证本文所提控制方法对干扰的自适应补偿能力,该实验暂不考虑疲劳的影响.在电刺激进行到15s时,通过在受试者脚踝处悬挂0.5kg的重物来施加外部力矩,作为外部干扰.图9记录了Neuro-SMC控制器在干扰前后膝关节角度、脉宽以及角度跟踪误差的变化结果.由图可知,悬挂重物前,系统经过1.5s达到稳定,3s~13s的均方根误差为1.26°(3.6%),脉宽均值为366µs;悬挂重物后,系统经过3s左右的调整重新恢复稳定,电刺激脉宽也自适应调节至400µs, 18s~28s的均方根误差为1.17°(3.3%).从图9中3s~15s的时间内,可观察到脉宽有逐渐减小的趋势,这应该是受试者无意识地收缩肌肉导致的,但是受试者自主肌肉收缩相当于天然的干扰,这也从侧面证明了该控制方法的抗干扰能力.因此,本文所提出的控制方法对外部干扰具有良好的自适应补偿能力,可以有效地调节电刺激强度以获得准确的关节运动.
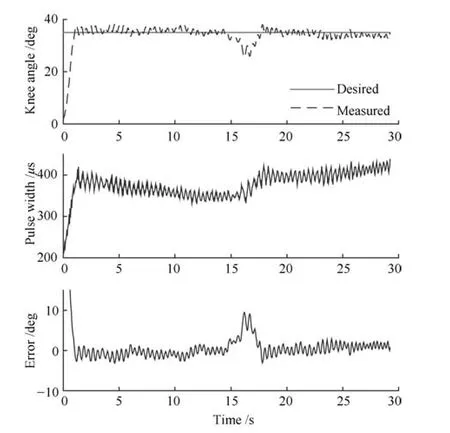
图9 神经滑模控制的扰动实验结果Fig.9 Control performance of neuro-SMC in disturbance test
4.2.4 FES疲劳实验
由于健康人在电刺激下不容易疲劳,故在两次实验间隔中让受试者做5分钟的深蹲,这时受试者明显感觉股四头肌处于疲劳状态.为更全面地验证控制器的跟踪性能,疲劳实验分为阶跃响应实验和正弦响应实验两部分,阶跃响应实验中的期望轨迹为35°,正弦响应实验中的期望轨迹为y=20+15sin(t−1.57),实验过程中不主动施加外部干扰力矩.图10和图11分别记录了Neuro-SMC控制器在疲劳前后阶跃响应和正弦响应的对比结果.在阶跃响应实验中,疲劳前系统经过2s达到稳定,稳定时的脉宽均值为250.7µs,角度均方根误差为1.07°(3.1%);疲劳后系统需经过2.5s达到稳态,稳定时的脉宽均值为316.4µs,角度均方根误差为2.22°(6.4%).在正弦响应实验中,疲劳前系统的脉宽变化与角度变化类似,角度均方根误差为3.93°(13.1%);疲劳后系统经过4 s调整后才达到稳定跟踪的状态,各时刻的电刺激强度相对于疲劳前也自适应地增大,角度均方根误差为4.50°(15%).在正弦响应时,虽然系统响应存在一定的滞后,导致系统的跟踪精度有所下降,但是目前的时滞和跟踪精度仍在可以接受的范围内,而时滞的原因可能与肌肉响应延时以及控制算法用时等因素有关.由上述分析可知,该神经滑模控制能够自适应地补偿因疲劳导致的肌力衰减,并调节电刺激强度以获得准确的关节运动.
5 结论
本文提出了一种神经网络自适应滑模控制器,通过Lyapunov方法设计径向基网络自适应律,在线估计系统参数辨识误差和未建模部分,获得更加精确的关节运动.为验证本文所提控制方法的有效性,以电刺激产生的膝关节运动控制为例,分别从稳态响应、抗扰动和抗疲劳等三个方面进行了仿真和实验研究,验证了本文所提出的神经滑模控制方法不仅可以准确地控制电刺激而获得期望的关节运动,而且当关节运动受到外部干扰和肌肉疲劳的影响时,还可自适应地对此进行补偿,有效地调节电刺激强度以获得准确的关节运动.虽然在电刺激过程中仍然存在一定程度的抖振,但是,如图8所示,本文所提出的控制方法相对于常规滑模控制在抖振方面有很大的改善.后续工作将从以下两个方面展开:1) FES康复系统的最终使用者为肢体瘫痪的患者,本实验目前仍处于健康人实验阶段,后续将开展患者实验;2)将控制算法推广至多关节参与的功能性更强的运动康复应用当中.
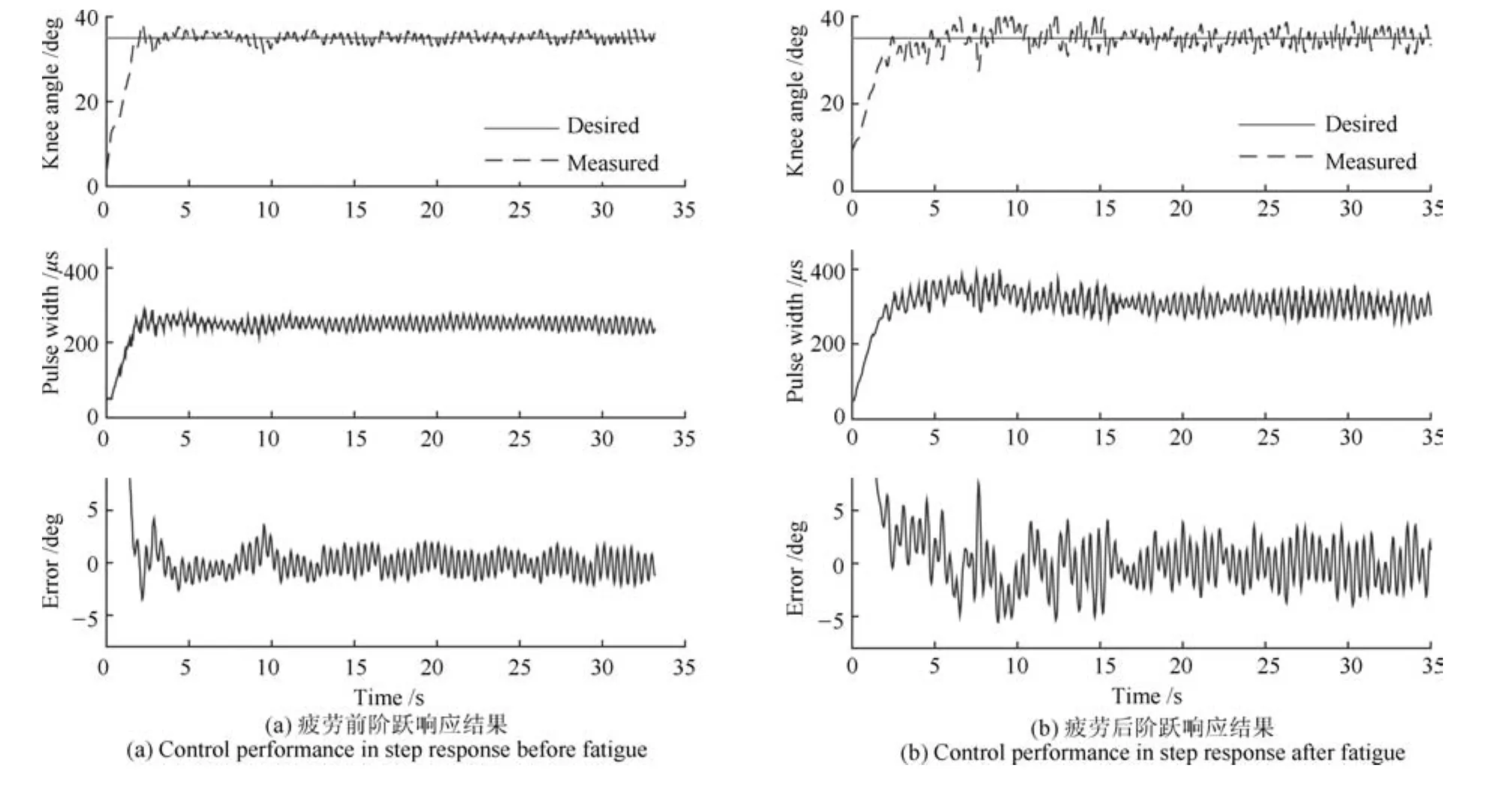
图10 疲劳实验前后神经滑模控制阶跃响应结果Fig.10 Control performance of neuro-SMC in step response in fatigue test
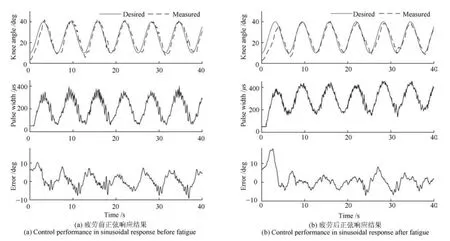
图11 疲劳实验中neuro-SMC正弦响应结果Fig.11 Control performance of neuro-SMC in sinusoidal response in fatigue test
1 Doucet B M,Lam A,Grifn L.Neuromuscular electrical stimulation for skeletal muscle function.Yale Journal of Biology and Medicine,2012,85(2):201−215
2 Quandt F,Hummel F C.The infuence of functional electrical stimulation on hand motor recovery in stroke patients: a review.Experimental&Translational Stroke Medicine, 2014,6(1):Article No.9
3 Kafri M,Laufer Y.Therapeutic efects of functional electrical stimulation on gait in individuals post-stroke.Annals of Biomedical Engineering,2015,43(2):451−466
4 Guiraud D,Coste A C,Benoussaad M,Fattal C.Implanted functional electrical stimulation:case report of a paraplegic patient with complete SCI after 9 years.Journal of Neuroengineering and Rehabilitation,2014,11(1):15
5 Zhang D G,Guan T H,Widjaja F,Ang W T.Functional electrical stimulation in rehabilitation engineering:a survey. In:Proceedings of the 1st International Convention on Rehabilitation Engineering&Assistive Technology.New York, USA:ACM,2007.221−226
6 Lynch C L,Milos R.Functional electrical stimulation:closeloop control of induced muscle contractions.IEEE Control Systems Magazine,2008,28(2):40−50
7 Ferrarin M,Palazzo F,Riener R,Quintern J.Model-based control of FES-induced single joint movements.IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2001,9(3):245−257
8 Kurosawa K,Futami R,Watanabe T,Hoshimiya N.Joint angle control by FES using a feedback error learning controller.IEEE Transactions on Neural Systems and Rehabilitation Engineering,2005,13(3):359−371
9 Yao Peng,Zhang Ding-Guo,Liu Jian-Rong.Suppressing pathological tremor on wrist joint using functional electrical stimulation:simulation and experiment.Chinese Journal of Biomedical Engineering,2014,33(3):379−384 (姚鹏,张定国,刘健荣.抑制腕部病理性震颤的功能性电刺激系统的仿真与实验.中国生物医学工程学报,2014,33(3):379−384)
10 Meadmore K L,Hughes A M,Freeman C T,Cai Z L,Tong D,Burridge J H,Rogers E.Functional electrical stimulation mediated by iterative learning control and 3D robotics reduces motor impairment in chronic stroke.Journal of Neuroengineering and Rehabilitation,2012,9(1):Article No.32
11 Zhang Q,Hayashibe M,Azevedo-Coste C.Evoked electromyography-based closed-loop torque control in functional electrical stimulation.IEEE Transactions on Biomedical Engineering,2013,60(8):2299−2307
12 Ren Y,Zhang D G.FEXO knee:a rehabilitation device for knee joint combining functional electrical stimulation with a compliant exoskeleton.In:Proceedings of the 5th IEEE RAS&EMBS International Conference on Biomedical Robotics and Biomechatronics.Sao Paulo,Brazil:IEEE, 2014.683−688
13 Brend O,Freeman C,French M.Multiple-model adaptive control of functional electrical stimulation.IEEE TransactionsonControlSystemsTechnology,2015,23(5): 1901−1913
14 Chen Y X,Hu J,Zhang F,Li P F,Hou Z G.EMG-based estimation of knee joint angle under functional electrical stimulation using an artifcial neural network.In:Proceedings of the 32nd Chinese Control Conference.Xi'an,China:IEEE, 2013.4661−4665
15 Wang Q,Sharma N,Johnson M,Gregory C M,Dixon W E.Adaptive inverse optimal neuromuscular electrical stimulation.IEEE Transactions on Cybernetics,2013,43(6): 1710−1718
16 Lynch C L,Popovic M R.A comparison of closed-loop control algorithms for regulating electrically stimulated knee movements in individuals with spinal cord injury.IEEE Transactions on Neural Systems and Rehabilitation Engineering,2012,20(4):539−548
17 Qiu S,He F,Tang J B,Xu J P,Zhang L X,Zhao X,Qi X,Zhou P,Cheng X M,Wan B K,Ming D.Intelligent algorithm tuning PID method of function electrical stimulation using knee joint angle.In:Proceedings of the 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society.Chicago,USA:IEEE,2014. 2561−2564
18 Jezernik S,Wassink R G,Keller T.Sliding mode closedloop control of FES:Controlling the shank movement.IEEE Transactions on Biomedical Engineering,2004,51(2): 263−272
19 Ajoudani A,Erfanian A.A neuro-sliding-mode control with adaptive modeling of uncertainty for control of movement in paralyzed limbs using functional electrical stimulation.IEEE Transactions on Biomedical Engineering,2009,56(7): 1771−1780
20 Farhoud A,Erfanian A.Fully automatic control of paraplegic FES pedaling using higher-order sliding mode and fuzzy logic control.IEEE Transactions on Neural Systems and Rehabilitation Engineering,2014,22(3):533−542
21 Zhang Yao,Ma Guang-Fu,Guo Yan-Ning,Zeng Tian-Yi.A multi power reaching law of sliding mode control design and analysis.Acta Automatica Sinica,2016,42(3):466−472 (张瑶,马广富,郭延宁,曾添一.一种多幂次滑模趋近律设计与分析.自动化学报,2016,42(3):466−472)
22 Li Xue-Bing,Ma Li,Ding Shi-Hong.A new second-order sliding mode control and its application to inverted pendulum.Acta Automatica Sinica,2015,41(1):193−202 (李雪冰,马莉,丁世宏.一类新的二阶滑模控制方法及其在倒立摆控制中的应用.自动化学报,2015,41(1):193−202)
23 Polycarpou M M.Stable adaptive neural control scheme for nonlinear systems.IEEE Transactions on Automatic Control,1996,41(3):447−451
24 Abbas J J,Chizeck H J.Neural network control of functional neuromuscular stimulation systems:computer simulation studies.IEEE Transactions on Biomedical Engineering,1995,42(11):1117−1127
25 Riener R,Fuhr T.Patient-driven control of FES-supported standing up:a simulation study.IEEE Transactions on Rehabilitation Engineering,1998,6(2):113−124
26 Liu Jin-Kun.Sliding Mode Control Design and Matlab Simulation(2nd edition).Beijing:Tsinghua University Press, 2012.404−409 (刘金琨.滑模变结构控制MATLAB仿真.第2版.北京:清华大学出版社,2012.404−409)
27 Liu Jin-Min.Establishment of National Standard about Inertial Parameters of Chinese Adults[Ph.D.dissertation], Beijing Sport University,China,2004 (刘静民.中国成年人人体惯性参数国家标准的制定[博士学位论文],北京体育大学,中国,2004)
28 Ferrarin M,Pedotti A.The relationship between electrical stimulus and joint torque:a dynamic model.IEEE Transactions on Rehabilitation Engineering,2000,8(3):342−352

吴 强华中科技大学机械科学与工程学院数字制造装备与技术国家重点实验室硕士研究生.主要研究方向为神经肌肉电刺激,先进控制理论及其应用.
E-mail:qiangwu@hust.edu.cn
(WU QiangMaster student at the State Key Laboratory of Manufacturing Equipment and Technology,School of Mechanical Science and Engineering,Huazhong University of Science and Technology.His research interest covers neuromuscular electrical stimulation and advanced control theory and applications.)

张 琴华中科技大学机械科学与工程学院数字制造装备与技术国家重点实验室副教授.2011年于法国蒙彼利埃大学自动化系统与微电子专业获博士学位.主要研究方向为计算神经康复,人机接口,生物电信号处理.本文通信作者.
E-mail:qin.zhang@hust.edu.cn
(ZHANG QinAssociate professor at the State Key Laboratory of Manufacturing Equipment and Technology,School of Mechanical Science and Engineering,Huazhong University of Science and Technology. She received her Ph.D.degree in automation system and microelectronics from University of Montpellier in 2011, France.Her research interest covers computational neurorehabilitation,human-machine interface,and biomedical signal processing.Corresponding author of this paper.)

熊蔡华华中科技大学机械科学与工程学院数字制造装备与技术国家重点实验室教授.1998年于华中理工大学(现华中科技大学)机械电子工程专业获博士学位.主要研究方向为机器人学,生机电一体化,康复工程装备.
E-mail:chxiong@hust.edu.cn
(XIONG Cai-HuaProfessor at the State Key Laboratory of Manufacturing Equipment and Technology,School of Mechanical Science and Engineering,Huazhong University of Science and Technology.He received his Ph.D.degree in mechatronics from Huazhong University of Science and Technology in 1998.His research interest covers robotics,biomechatronics and rehabilitation robot.)
Adaptive Control of Joint Movement Induced by Electrical Stimulation
WU Qiang1ZHANG Qin1XIONG Cai-Hua1
This paper presents a neuro sliding mode control method of electrical stimulation for accurateelectricallyinduced joint movement by compensating the efects of external disturbances and muscle fatigue during stimulation.The sliding mode control law is rested on an electrically-induced musculoskeletal model.The adaptive control law of the radial basis function network which is used to approximate system modeling uncertainties is derived through the Lyapunov function.This proposed method is evaluated by adaptive control of electrical stimulation to achieve expected knee movements,especially in the presence of external disturbances and muscle fatigue.Both simulation and experimental studies indicate that the proposed adaptive control method is efective and feasible to compensate deviations of joint movement resulting from external disturbances and muscle fatigue.
Neuro sliding mode control,muscle fatigue,movement control,functional electrical stimulation(FES)
吴强,张琴,熊蔡华.功能性电刺激下的关节自适应运动控制研究.自动化学报,2016,42(12):1923−1932
Wu Qiang,Zhang Qin,Xiong Cai-Hua.Adaptive control of joint movement induced by electrical stimulation.Acta Automatica Sinica,2016,42(12):1923−1932
2016-02-29 录用日期2016-10-14
Manuscript received February 29,2016;accepted October 14, 2016
国家自然科学基金(51305148,51335004),高等学校博士学科点专项科研基金(20130142120086),湖北省自然基金(2015CFA004)资助
Supported by National Natural Science Foundation of China (51305148,51335004),Specialized Research Fund for the Doctoral Program of Higher Education(20130142120086),and Natural Science Foundation of Hubei Province(2015CFA004)
本文责任编委王卫群
Recommended by Associate Editor WANG Wei-Qun
1.华中科技大学机械科学与工程学院数字制造装备与技术国家重点实验室武汉430074
1.State Key Laboratory of Manufacturing Equipment and Technology,School of Mechanical Science and Engineering, Huazhong University of Science and Technology,Wuhan 430074
