舱筏系统中隔振器多向阻抗的辨识
2016-12-27徐时吟
孙 巍,徐时吟
(1.海军驻沪东中华造船集团有限公司军事代表室 上海 200129;2.上海交通大学 机械系统与振动国家重点实验室,上海 200240)
舱筏系统中隔振器多向阻抗的辨识
孙 巍1,徐时吟2
(1.海军驻沪东中华造船集团有限公司军事代表室 上海 200129;2.上海交通大学 机械系统与振动国家重点实验室,上海 200240)
针对舱筏系统中的橡胶隔振器,构建由刚体质量块以及待测隔振器所组成的耦合系统模型。利用试验测得的系统整体及刚体质量块的导纳矩阵,采用子结构分解方法得到隔振器的多向阻抗矩阵。辨识结果与测试结果吻合较好,验证子结构分解法对隔振器多向阻抗辨识的有效性,为舱筏系统的精细化建模提供参考。
振动与波;舱筏系统;隔振器;子结构分解法;多向阻抗
潜艇声隐身性能是保证其能在复杂多变的战场上生存的首要因素。潜艇的辐射噪声有三大来源,分别为机械噪声、螺旋桨噪声和水动力噪声[1]。之前的研究指出[2,3],机械噪声是潜艇在低速巡航工况下最为主要的噪声来源,其在潜艇的总辐射噪声中所占的比重能够达到七成左右。潜艇机械噪声的控制可以从声源和传递途径这两个方面来着手实施,隔振是工程实际中最为常用也是最行之有效的手段。通过在振源和基座之间附加一个子系统,改变振源对系统激励的能量频谱结构以达到振动抑制的目的。现代潜艇中的机械设备普遍进行隔振处理,尤其是舱筏隔振技术的应用大幅提升了潜艇的声隐身性能[4]。
舱筏隔振系统是一种受复杂振源作用的多弹性支撑隔振系统,多点多向耦合效应对于系统振动传递有很大的影响。Sanderson研究了多支撑系统在考虑多向振动传递时,外力和弯矩激励下的运动传递和能量传递[5]。研究结果表明,在计算中忽略系统的转角自由度会使对功率流传递的预测出现偏差,偏差程度取决于隔振器的阻抗和基础连接点处输入导纳之间的比值。为了能在模型中体现出多向自由度耦合的影响,建模时需要用到隔振器多向阻抗矩阵及系统子结构多向频响矩阵,而这两项数据的精确获取也是建模过程中的难点。
隔振器作为弹性元件是舱筏隔振系统中的关键组成部分,准确描述隔振器动力学特性是研究系统振动传递的前提条件。文献[6]中指出,当激励不是施加在质心位置时,会引起机组的摇摆振动。受此影响,隔振器将会出现弯曲变形,仅靠垂向阻抗或者3个平动方向的阻抗无法对隔振器的动力学特性做出准确的描述。如果在建模过程中仅考虑隔振器的平动阻抗,忽略弯曲阻抗的影响,会导致计算得到的系统响应结果出现误差,给舱筏系统的精细化建模带来不利影响。
对于隔振器阻抗矩阵的获取,已经开展了大量的研究工作,包括集总参数模型[7]和连续体模型[8]。但是上述两种模型都很难准确描述实际隔振器的动力学特性。因此针对具体型号的隔振器,通过试验测量得到其阻抗是更合理的做法。试验方法可以分为直接法和间接法,前者常用于隔振器三向平动阻抗的测量,具体详见文献[9]。而间接试验方法通过测试包含待测隔振器及已知参数质量块的振动系统,利用系统以及质量块的输入输出特性求解隔振器的导纳,进而求逆得到其阻抗矩阵[10]。文中针对舱筏隔振系统中的BE型橡胶隔振器,通过间接方法,对舱筏系统中所采用的橡胶隔振器的多向阻抗特性进行辨识,基于子结构分解从试验数据中获取隔振器的多向阻抗信息,为构建基于试验的舱筏系统精细化模型提供参考。
1 子结构导纳分解法
建立如图1中所示的耦合系统模型,其由三个子结构组成,将子结构P作为子结构S和R之间的弹性连接件。在已知系统整体导纳以及子结构S、R导纳的前提下,通过分解方法得到弹性连接件P的导纳矩阵。
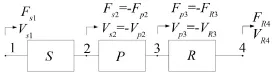
图1 由振源-传递路径-受体组成的耦合系统
图中系统各节点的编号为1-4,VSi、VPi和VRi是各节点处的响应,FSi是作用于子结构S上的激励力向量,FPi和FRi是连接点处的传递力向量。响应与力之间的关系可以表示为
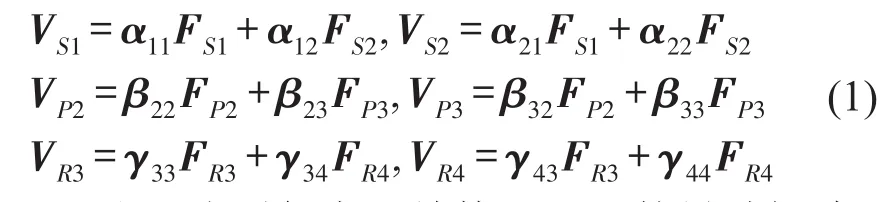
式中αij、βij和γij分别代表子结构S、P、R的导纳矩阵。连接点处的力平衡条件和位移协调条件为

将式(1)代入式(2),并利用式(2)中的等式关系,可以得到节点2处的传递力


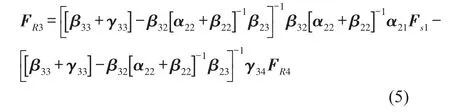
将式(3)代入式(4),并利用式(2)中所给出的关系式,可以得到在点1和点4处施加激励时点3处受到的传递力
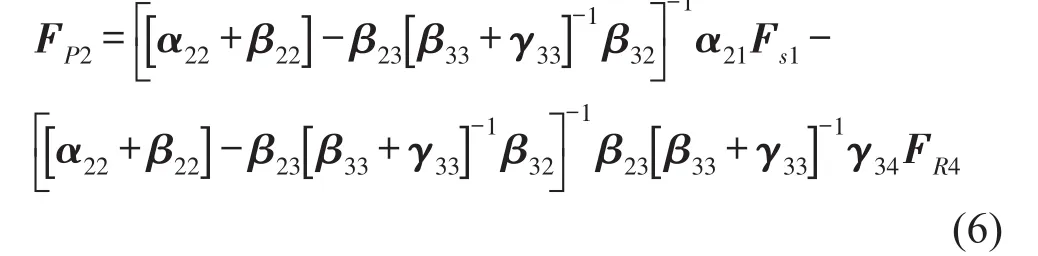
通过同样方法可以得到节点3处的传递力
通过同样方法可以得到子结构1、2之间的传递力
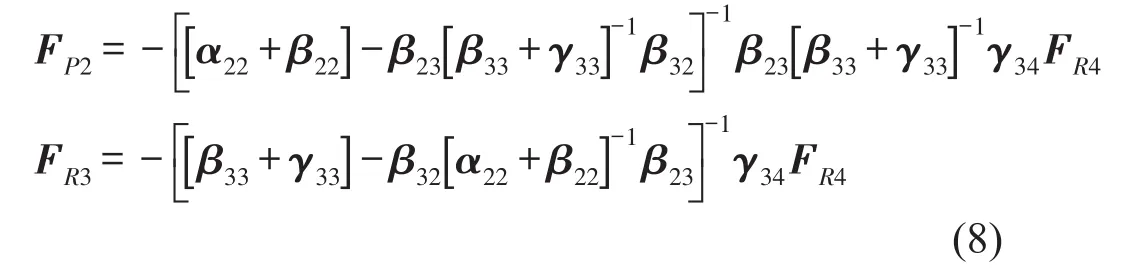
当只有节点1受到外力作用时,式(5)和式(6)可以分别简化为同样,当只有节点4受到外力作用时,式(5)和式
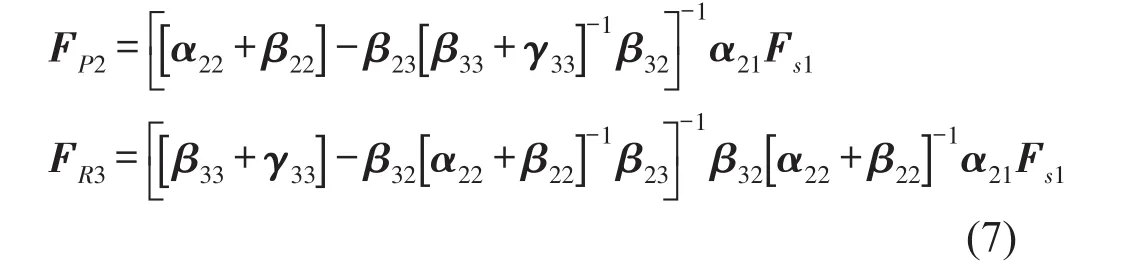
(6)可以简化为
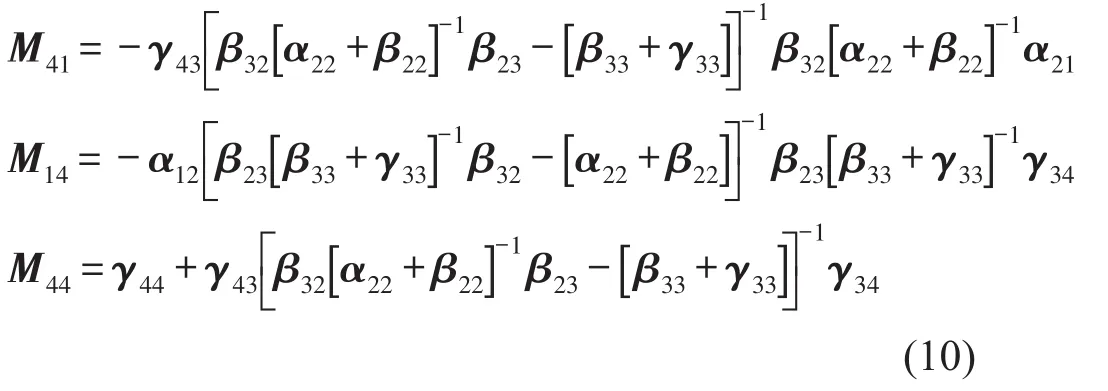
对于图1中所示的系统,令其导纳为Mij,可以得到V1=M11FS1,V1=M14FR4,V4=M41FS1,V4=M44FR4。用子结构的导纳αij、βij和γij来表示Mij,以M11为例说明推导的过程。联立式(8)和式(2)得到FS2,将其代入式(1)得到节点1处受单位激励时原点处的响应

同理,可以得到系统其余导纳矩阵M41、M14、M44。
基于求得的耦合系统导纳矩阵,可以进一步推得弹性连接件的导纳βij关于Mij及αij、γij的函数表达式。将式(9)和式(10)的第二项分别改写为
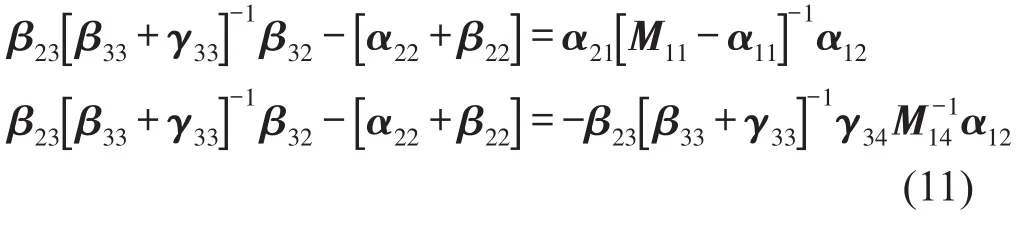
通过式(11)可以得到

同理将式(10)的第一项和第三项改写为
对式(10)的第二、第三项求解关于[β33+γ33]的方程可以得到

对式(14)进行简化

再将式(15)代入式(12),可以得到

由式(16)可以得到弹性连接件的传递导纳β23

再将式(17)代入式(12)可以得到弹性连接件的原点导纳

通过同样方法可以得到β22和β32,对式(13)求解关于[α22+β22]的方程同时对式(11)求解关于[α22+β22]的方程,可以得到


式(20)可以简化为

将式(21)代人式(19)可以得到

由式(22)可以得到弹性连接件的传递导纳β32

将式(23)代入式(19)可以得到其原点导纳β22

进一步将原点导纳简化为
2 基于子结构分解的橡胶隔振器多向阻抗的获取
2.1 实验模型
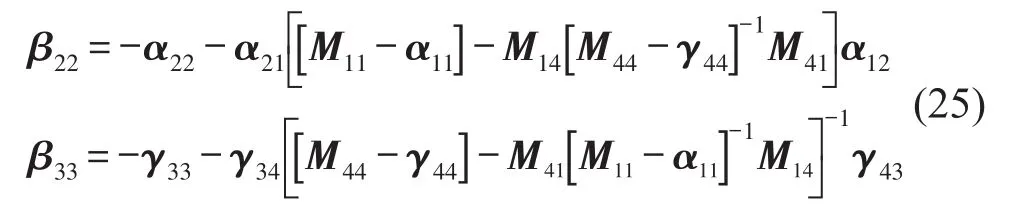
通过实验测试获取舱筏系统中所采用的橡胶隔振器的多向阻抗矩阵。基于子结构分解方法,以隔振器为待测子结构建立对应的耦合系统模型。图2给出了橡胶隔振器的示意图和实物照片,具体采用的隔振器型号为BE-15和BE-60型隔振器,尺寸参数如表1所示。
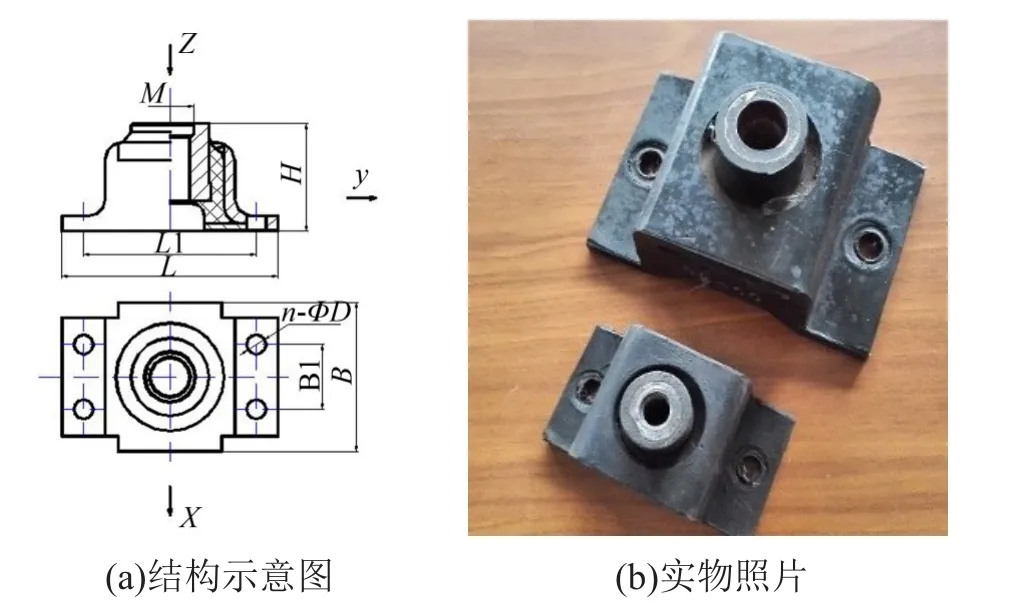
图2 BE型橡胶隔振器
表1 隔振器的结构尺寸/mm及其质量/kg
试验系统由质量块和待测隔振器组成,图3为试验系统示意图,图中垂直于纸面的方向为z轴。如图所示,点1和点4分别为质量块1和质量块2上的参考点,而点2和点3分别为质量块与待测隔振器之间的连接点。类比于图1中所示的耦合系统,令待测隔振器的导纳为βij(i,j=2,3),隔振器左右两端质量块的导纳分别为αij(i,j=1,2)和γij(i,j=3,4),而耦合系统的整体导纳矩阵为Mij(i,j=1,4)。
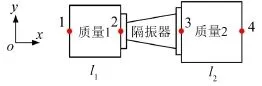
图3 试验模型示意图
图4为试验装置,待测隔振器两端分别通过螺栓与刚性质量块相连。对应于BE-15型隔振器的刚性质量块尺寸分别为0.06 m×0.08 m×0.1 m和0.06 m×0.1 m×0.1 m,而对应于BE-60型隔振器的刚性质量块尺寸分别为0.085 m×0.1 m×0.14 m和0.085 m×0.14 m×0.14 m。

图4 耦合系统试验模型
假设系统在各个平面内的运动是相互独立的,因此需要依次对隔振器在每个平面内的导纳矩阵进行辨识。下面将以xoy平面作为例子,对分解方法进行具体说明。
2.2 质量块的导纳矩阵
通过刚体理论可以得到质量块上任意两点之间导纳的解析表达式,从而建立质量块在xoy平面内的导纳矩阵
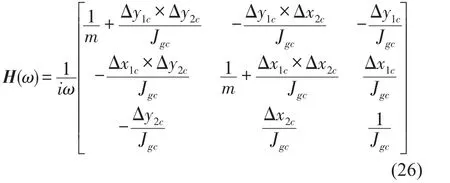
式中m表示质量块的质量,xi、yi表示激励点和响应点的坐标,xc、yc表示质量块的质心坐标,而质量块激励点、响应点与质心之间的相对位置可以分别表示为

2.3 耦合系统的导纳矩阵
耦合系统的导纳矩阵直接由试验测得,式(28)为其导纳矩阵。这里将以点1处的原点导纳M11为例,说明系统导纳的测试流程。面内运动拥有三向自由度(ux,uy,θz),因此M11是一个3×3的矩阵。其中沿x轴的纵向运动独立于其余两向自由度,而沿y轴的横向运动和绕z轴的弯曲运动之间存在相互耦合关系。为了得到完整的原点导纳矩阵,需要在三个方向分别施加激励。在试验中针对每向激励设计了对应的测试工况,图5给出了具体的测试流程图及测点位置。

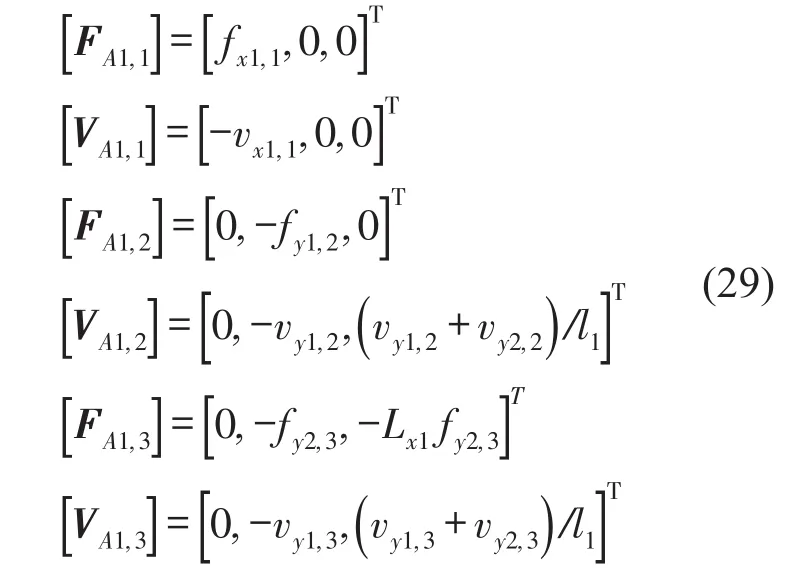
工况1测试系统沿x向的导纳,在点1处施加纵向力fx1,1,同时在点1布置沿x向的传感器,测得点1的纵向加速度响应vx1,1,下标中第一项x1代表点1处x方向的力或位移,下标中的第2项代表测试工况的编号。工况2中点1处受到横向力fy1,2,在点1和点2位置沿y向布置传感器。由于沿y向及绕z轴的运动是相互耦合的,横向力fy1,2会激发隔振器的弯曲变形,需要同时测量横向位移和绕z轴的转角。受试验条件的限制,无法直接测得点1位置的转角,通过对相邻的1、2号测点的垂向响应vy1,2、vy2,2进行差分,近似计算点1处的转角θz1,2。工况3测试系统在弯矩作用下的响应,由于无法直接在结构上施加弯矩,同样采用近似的方法,在点2处施加横向激励fy2,3,将其等效为作用在1号点的绕z轴弯矩以及作用在2号点的横向力,在点1和点2位置沿y向布置传感器,测得系统在该激励下的横向位移vy1,3和近似转角θz1,3。
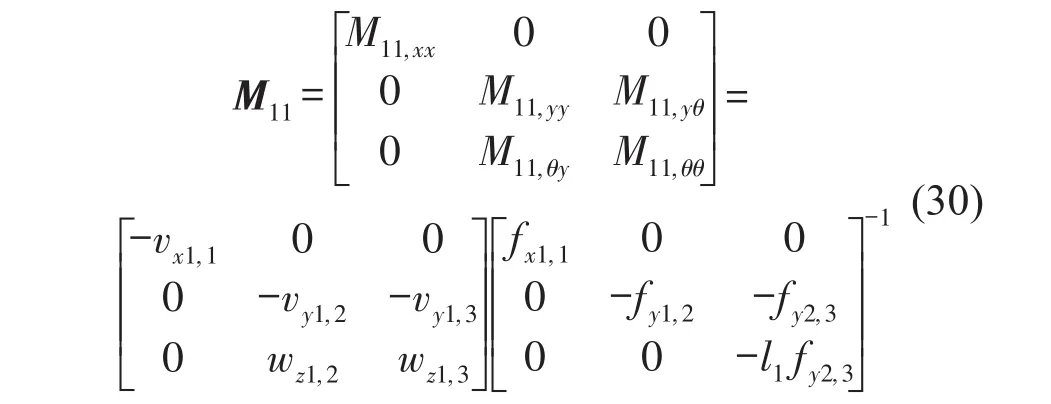
将三种工况下的测试结果整理成矩阵形式
而系统的原点导纳M11可以表示为
通过同样的流程,可以分别得到参考点1-4、4-1、4-4之间的导纳矩阵M14、M41和M44
试验测试系统包括三个部分:激励源、数据采集系统和数据处理系统。激励源主要由信号发生器、功率放大器和激振器等组成;数据采集系统和数据处理系统主要由电荷放大器、力传感器、加速度传感器以及LMS数据采集和动态信号分析仪组成。在试验中,将试验对象自由悬挂,令其在水平方向处于自由状态,精确调节悬挂绳的长度,尽量使质量块及隔振器的中心处于同一水平面。图5中给出了不同工况下的激励情况和测点分布,测量时将加速度传感器通过小螺杆固定在结构上,采集测点处的振动加速度信号,将电磁激振器平放在U型支架上,沿水平方向施加激励。采用的信号为宽带白噪声信号,频率带宽取为1 024 Hz,频率分辨率为0.5 Hz。
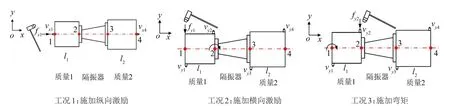
图 5耦合系统导纳M11测试流程图
2.4 隔振器导纳矩阵的辨识
根据已知的耦合系统以及质量块的导纳矩阵,结合第1节中介绍的分解方法,由式(17)、式(23)和式(25)得到隔振器在xoy平面内的各向导纳β22、β23、β32、β33。通过对导纳矩阵进行求逆运算,即可得到隔振器的各向阻抗数据,而隔振器其余自由度方向的阻抗矩阵可以通过相同的流程获得。图6中给出了通过子结构分解方法得到的BE-60型隔振器在xoy平面内的各向阻抗,在图6(a)中将阻抗平台测试得到的隔振器纵向阻抗与分解结果进行了对比。如图所示,隔振器输入输出端之间的跨点导纳吻合情况良好,而隔振器的原点阻抗在波谷处存在一定的误差,辨识结果和测试结果不能很好的吻合。误差可能是由于测试中采用了不同的边界条件所导致的,在阻抗台测试中需要将隔振器一端固定在台架上,而在本试验中采用的是自由边界。
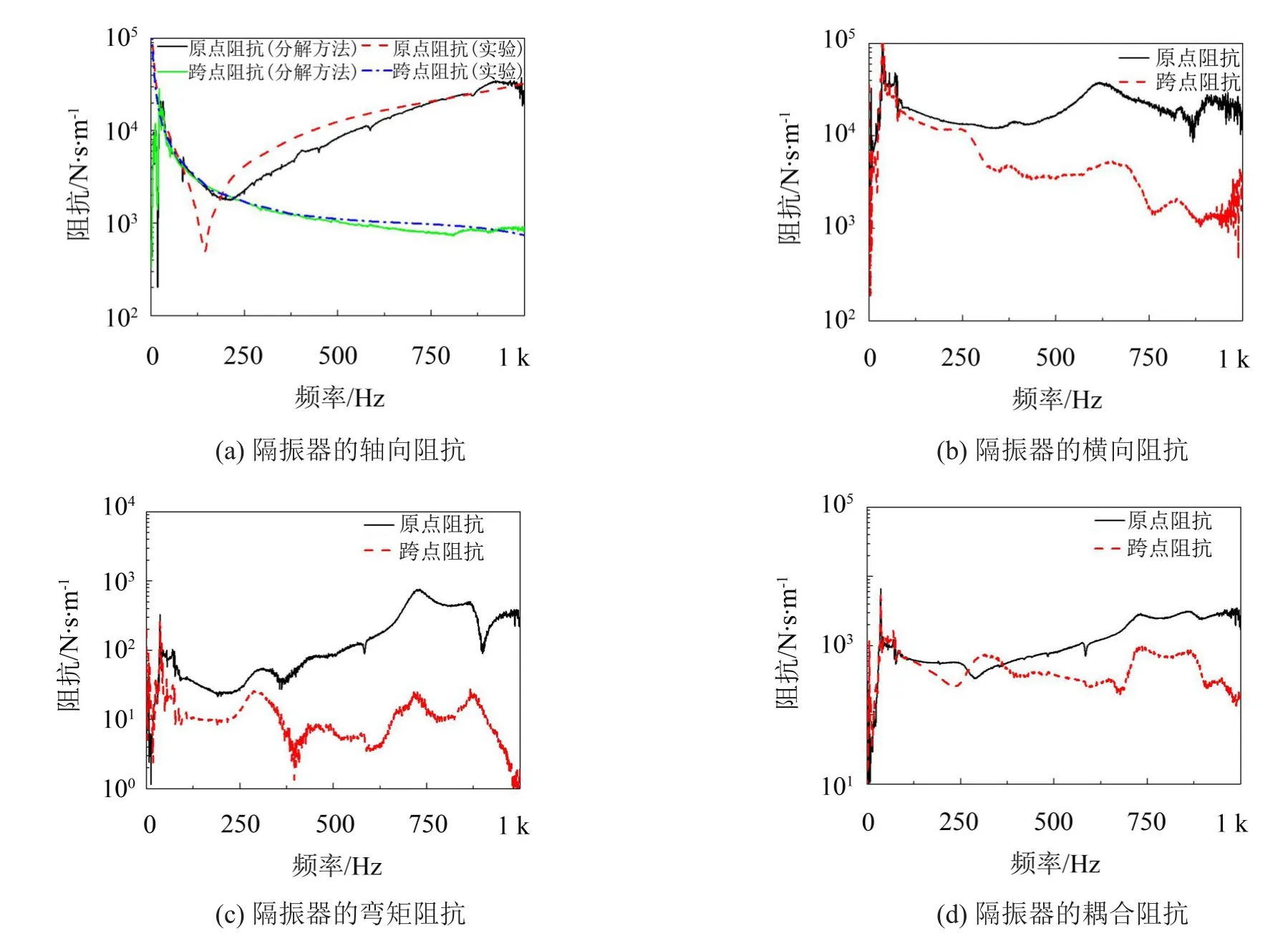
图6 辨识得到的隔振器阻抗
3 结语
针对舱筏系统中的BE型橡胶隔振器,构建了由刚体质量块以及待测隔振器所组成的耦合系统模型。采用子结构分解方法得到隔振器的多向阻抗矩阵。分解方法得到的结果与实验结果吻合较好,验证了子结构分解法的有效性,研究结论为构建基于试验的舱筏系统精细化模型提供参考。
[1]陈志坚,夏齐强,艾海峰.潜艇典型结构的声振特性研究概况及声学设计构想[J].噪声与振动控制,2012,32(2):1-6.
[2]姚耀中,林立.潜艇机械噪声控制技术综述[J].舰船科学技术,2007,29(1):21-26.
[3]姚耀中,林立.潜艇机械噪声控制技术的现状与发展[J].舰船科学技术,2006,28(2):3-8.
[4]程世祥,张志谊,华宏星.周期桁架结构浮筏隔振特性分析与实验研究[J].噪声与振动控制,2011,31(6):5-9.
[5]SANDERSON M.Vibration isolation:Moments and rotations included[J].Journal of Sound and Vibration, 1996,198(2):171-191.
[6]黄修长.舱筏隔振系统声学设计及优化、控制[D].上海:上海交通大学,2011.
[7]XIUCHANG H,SHIYIN X,AIHUA J,et al.Modeling and optimization of floating raft systems in submarines underdifferentobjectives by using hybrid genetic algorithm[J].Journal of Vibration and Control,2012, 18(2):268-297.
[8]KARI L.On the waveguide modelling of dynamic stiffness of cylindrical vibration isolators.Part i:The model,solution and experimental comparison[J].Journal of Sound and Vibration,2001,244(2):211-233.
[9]DICKENS J,NORWOOD C.Universal method to measure dynamic performance of vibration isolators under static load[J].Journal of Sound and Vibration,2001, 244(4):685-696.
[10]KIM S,SINGH R.Multi-dimensional characterization of vibration isolators over a wide range of frequencies[J].Journal of Sound and Vibration,2001,245(5):877-913.
Multi-directional Impedance Identification of the Rubber Isolator in Floating Raft Systems
SUN Wei1,XU Shi-yin2
(1.Naval Military Representative Office in Hudong Zhonghua Shipyard(Group)Co.Ltd., Shanghai 200129,China; 2.State Key Laboratory of Mechanical System and Vibration,Shanghai Jiaotong University, Shanghai 200240,China)
The coupled system model composed by rigid mass block and the un-calibrated isolator is constructed for the rubber isolator in the floating raft system.Based on the experimental data of the admittance matrix of the rigid mass block and the coupled system,the dynamic decoupling method is used to identify the multi-directional impedance matrix of the rubber isolator.The identified impedance matrix of the rubber isolator agrees well with the test data,which verifies the effectiveness of the dynamic decoupling method.This work provides guidance for the precise modeling of floating raft systems.
vibration and wave;floating raft system;rubber isolator;dynamic decoupling method;multi-directional impedance
O328
:A
:10.3969/j.issn.1006-1335.2016.06.037
1006-1355(2016)06-0186-06
2016-07-25
孙巍(1978-),男,浙江省绍兴市人,硕士,从事舰船设计与建造研究。E-mail:sunwei1313@sina.com
