多GPS架构下汽车实时横摆角速度的测量方法
2016-12-21夏泽斌洪昊陈富泽
夏泽斌,洪昊,陈富泽
(1.三明学院机电工程学院,福建三明365004;2.三明机械CAD工程研究中心,福建三明365004)
多GPS架构下汽车实时横摆角速度的测量方法
夏泽斌1,2,洪昊1,2,陈富泽1
(1.三明学院机电工程学院,福建三明365004;2.三明机械CAD工程研究中心,福建三明365004)
通过多GPS架构之间的几何约束关系,有效的保证多GPS之间的相对位置及由GPS测量的汽车运行轨迹的精确性,再通过多GPS在汽车运行轨迹上记录的坐标值计算得到汽车运行过程中的实时横摆角速度值。并同步利用IMU设备测试汽车运行过程中的横摆角速度,与GPS数据计算得到的横摆角速度进行对比分析。结果表明,在此种动态数据处理方法下计算得到的横摆角速度精度得到提高并满足汽车性能道路试验要求。
多GPS;汽车测试;实时;横摆角速度
汽车在行驶过程中的横摆角速度是汽车主动安全控制、汽车故障诊断和汽车试验的必要因素[1-2]。目前主要利用IMU进行汽车横摆角速度的测量,为弥补IMU存在的随机漂移和误差累计,融入GPS数据通过卡尔曼算法对其进行处理[3-11]。这样使得测试成本高昂,并且测试过程复杂,因此有必要构建一种简易可行的测试方法。多GPS架构基于单一GPS信号,具有全无误差累积的特点,对汽车的运行轨迹进行测量,进一步计算得到汽车的横摆角速度。
1多GPS架构及测试数据特点
1.1多GPS架构
车厢作为一个刚体,GPS天线布置在车厢顶部,通过测量车厢上3个点的坐标,利用多GPS架构与车厢的几何关系,可以计算得到车厢的姿态角。GPS以一定的数据更新率实时更新数据点,通过前后点的位置关系和时间差,计算得到汽车在运动过程中的横摆角速度。本文用3个GPS天线分别布置在车厢上同步采集这3个点的实时坐标值,如图1所示。

图1 3个GPS天线的布置图
图中,给每个GPS天线设置标识码,分别为1号GPS、2号GPS和3号GPS。图中XY坐标系为大地坐标系,X轴正向指向大地东向,Y轴正向指向大地北向。(X1,Y1,Z1)是1 号GPS处的坐标,(X2,Y2,Z2)是2号GPS处的坐标,(X3,Y3,Z3)是3号GPS处的坐标。定义1号GPS前一点的坐标为(X1',Y1',Z1'),(X2', Y2',Z2')是2号GPS前一点的坐标,(X3',Y3', Z3')是3号GPS前一点的坐标。3个GPS天线处测得的瞬时速度分别为V1、V2、V3,车厢纵轴线与大地坐标系中X轴间的夹角为汽车行驶过程中的横摆角θ,汽车质心处的速度方向与X轴的夹角为汽车航向角φ。其中GPS1与GPS2垂直与汽车纵轴,3个GPS程边长为1 m的正三角形分布。
1.2测试数据特点
由于在实际测量中,测量得到的GPS位置坐标信息在汽车静止的时候波动很大,在汽车运动起来的时候,分别从各自的起点开始而小幅度的波动。这是因为GPS的定位误差为1.8 m,测量精度是0.06 m所引起的[11]。在多GPS架构下,汽车运行过程中多个GPS的相对位置受到初始定位误差的影响,测量到的GPS轨迹存在误差,如图2所示。
图2中,1、2和3分别代表1号GPS、2号GPS和3号GPS的运行轨迹,同一时刻3个GPS天线处坐标点的连线构成三角形序列,且图中XY坐标的比例为1∶1。从图中可以看到,每个小三角形明显不成边长为1 m的正三角形形状,但三角形序列所构成的轨迹趋势是相对正确的。
2多GPS架构下的数据处理方法
2.1轨迹矫正算法
首先把起始点,即开始采集数据时候第一个时刻的3个点,构成的三角形状矫正成为边长为1 m的正三角形形状,并称之为平移矫正。如图3所示。

图2 3个GPS测量原始轨迹图
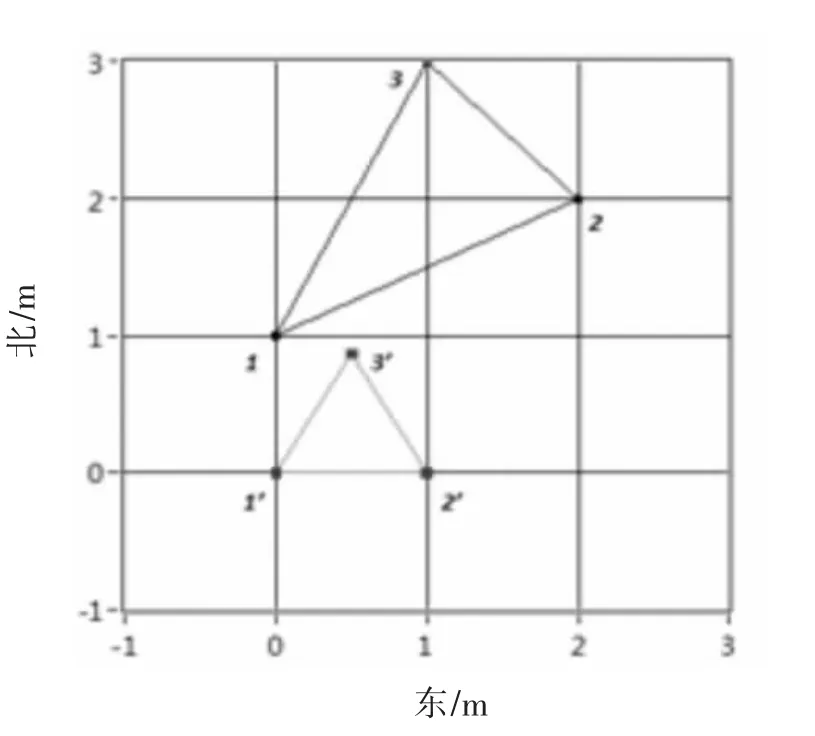
图3平移矫正
图3中,三角形123为原始轨迹的起始点,三角形1'2'3'为矫正后轨迹的起始点。要达到如此目的,需对数据进行如下处理:

式中,设置1号GPS读取的坐标值为坐标原点,继而以该点为基准,确定其他两点的坐标值。(X1p,Y1p)为点1'处的坐标值,(X2p,Y2p)为点2'处的坐标值,(X3p,Y3p)为点3'处的坐标值,L12、L13和L23、为3个GPS天线相互距离。原始轨迹中起始点X1=0,Y1=1;X2=2,Y2=2;X3=1,Y3=3;经过矫正后得到X1p=0,Y1p=0;X2p=1,Y2p=0;X3p=0.5,Y3p=0.866;满足L12p=L13p=L23p=1。
因为在实际布置中,1号GPS和2号GPS是垂直于汽车纵轴的,要保证这种几何关系,需要对经过平移矫正后的数据再进行旋转矫正,如图4所示。
图4中,点2'和点3'绕着点1'顺时针旋转了θ分别到2"和3",数据处理方法为:

式中,(Xz,Yz)为旋转后三角形各店的坐标值,θ为旋转角度。通过平移矫正和旋转矫正,最后得到矫正值如下:

在实时采集数据的过程中,把采集到的当前点值减去矫正值即可得到矫正后的实时轨迹,如图5所示。

图4旋转矫正

图5矫正后的轨迹图
从图5中可以看到,经过初始矫正后的轨迹中每个时刻3个GPS坐标点所构成的三角形和实际布置情况基本一致,整体运动趋势也满足汽车行驶轨迹,所有经过此算法矫正后的轨迹基本能正确的反应出真实轨迹。
2.2多GPS架构下横摆角速度的计算方法
横摆角速度是指汽车车身绕汽车坐标系里Z轴的旋转速度,在本文模型中,横摆角速度为:

式中,ωri代表第i时刻的横摆角速度,θi代表第i时刻的汽车横摆角,Δt代表同一GPS测量数据两点之间的时间差,把GPS测量的各点坐标值代入上式,即可得到汽车横摆角速度值。
3实车试验及结果分析
3.1试验条件
3个GPS天线分别以边长为1 m的等边三角形布置在车顶,其中1、2号GPS天线连线与汽车纵轴线垂直,3号GPS天线位置处于汽车纵轴线上。IMU固定在车厢上的3个GPS中间位置,安装需注意X轴正方向应指向汽车前进方向。总布置图如图6所示。

图6硬件平台与GPS接收机连接图
图6中,1~3为GPS天线,接收来自卫星的微波信号;4~6分别是1~3所对应的GPS接收机,负责处理由GPS天线处传来的信号。7~9是电源,为GPS接收机和GPS天线提供电能量;10是PC机,有4个串口接口,能同时读取3个GPS接收机输出的串口数据和IMU输出的串口数据;11是IMU测量系统。其中GPS测试数据精度为0.06 m,数据更新率为20 Hz;IMU设备动态精度为1.5°,偏差可重复性小于0.3°/s,数据更新率为100 Hz。
3.2结果分析
参照汽车整车道路试验方法国家标准,在平直混凝土或沥青路面上,布置标桩5根,试验汽车以蛇形穿杆通过试验路段[12]。得到试验结果如图7所示。
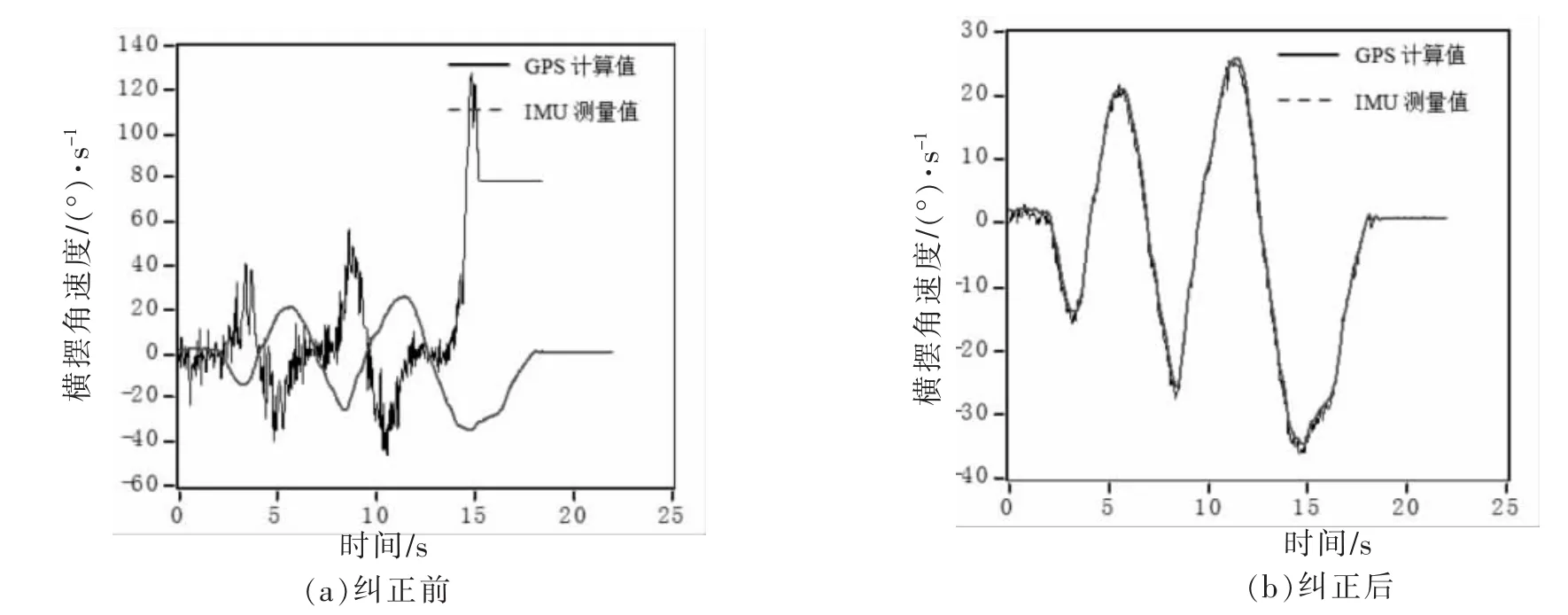
图7矫正前后GPS计算与IMU测量的横摆角速度
图7中(a)、(b)分别为轨迹矫正前后用3个GPS天线处实时坐标值计算得到的汽车横摆角速度与IMU测量得到的横摆角速度值对比,黑色曲线为利用GPS数据计算的横摆角速度值,红色曲线为IMU测量的横摆角速度值。通过对比可以看出,轨迹矫正前用GPS坐标值计算得出的汽车横摆角速度明显不正确,轨迹矫正后用GPS坐标值计算得出的汽车横摆角速度值整体趋势与IMU测量值一致,数值大小也与IMU测量值基本上一致,且波动不大,最大偏差在5(°)/s以内,可以认为满足汽车测试的要求。
4结论
利用多GPS架构测量的汽车横摆角速度与验证系统测量得到的对应数据一致性好,最大偏差在5°/s以内,可以认为满足汽车测试的要求。从而避免了传统测量方法带来的安装和误差累计等困难。试验工况具有典型性,分析结果具有一定的参考价值,为之后GPS深入运用于汽车测试领域提供良好的基础。
[1]余卓平,高晓杰.车辆行驶过程中的状态估计问题综述[J].机械工程学报,2009,45(5):20-32.
[2]黄晨,陈龙.稳态工况下横摆角速度与侧倾角的关系分析[J].农业机械学报,2014,45(2):34-39.
[3]ALI ALMAGBILE,WANG JIN LING,DING WEI DONG.Evaluating the p erformances of a daptive k alman f ilter Methods in GPS/INS Integration[J].Journal of Global Positioning Systems,2010,10(9):33-40.
[4]王家恩,陈无畏.基于期望横摆角速度的视觉导航智能车辆横向控制[J].机械工程学报,2012,48(4):108-115.
[5]朱冰,贾晓峰.基于双dSPACE的汽车动力学集成控制快速原型试验[J].吉林大学学报(工学版),2016,46(1):8-14.
[6]YING CHIH LAI,SHAU SHIUN JAN,FEIBIN HSIAO.Development of a low-cost attitude and heading reference systeMusing a three-axis rotating platform[J].Sensors,2010(10):2472-2491.
[7]安长江,李文勇.基于GPS技术的汽车跑偏量测试方法研究[J].汽车工程,2009,31(9):804-806.
[8]张小龙,冯能莲,宋健,等.基于SIMS/GPS的汽车运动状态组合测量系统[J].农业机械学报,2008,39(10):30-35.
[9]刘美生,杨春生,罗发贵,等.利用GPS技术进行汽车运动稳定性测试技术研究[J].中国测试技术,2008,34(5):10-15.
[10]李靖,张向文.汽车EPS预测控制仿真研究[J].计算机仿真,2015,32(11):188-192.
[11]陈永冰,钟斌.惯性导航原理[M].北京:国防工业出版社,2007.
[12]何耀华.汽车试验技术[M].北京:机械工业出版社,2010.
(责任编辑:朱联九)
Measurement Method for Real-Time Yaw Rate of Vehicle under Multi GPS Architecture
XIA Ze-bin1,2,HONG Hao1,2,CHEN Fu-ze1
(1.School of Mechanical&Electronic Engineering,Sanming University.,Sanming 365004,China; 2.Sanming Engineering Research Center of Mechanical CAD,Sanming 365000,China)
Based onmultiGPS architecture,a dynamic processingmethod of testdata is proposed.The geometric constraints between multi GPS architecture effectively guarantee the relative position between GPS and the accuracy of GPS measurement by automobile running track.Through the coordinates ofmultiGPS in automobile running track recorded on the value calculated by the vehicle in the running process,the real-time yaw rate value is gotten.And synchronously using IMU equipment to test the yaw rate of the vehicle running process,and the calculation of the angular velocity of the GPS data is compared and analyzed.The results show that the accuracy of the yaw rate can be improved by themethod of dynaMic data processing,and it canmeet the requirements of vehicle performance test.
multi-car GPS;automotive test;real time;yaw rate
U 467.4
A
1673-4343(2016)06-0046-06
10.14098/j.cn35-1288/z.2016.06.008
2016-09-19
福建省教育厅科技项目(JK2014047);福建省教育厅科技项目(JAT160463);三明学院科技项目(B201612)
夏泽斌,男,福建三明人,助教。主要研究方向:汽车性能测试与仿真分析。
