基于双模糊控制器的二自由度半主动悬架仿真研究
2016-12-21王孝鹏陈秀萍魏剑吴龙
王孝鹏,陈秀萍,魏剑,吴龙,2
(1.三明学院机电工程学院,福建三明365004;2.机械现代设计制造技术福建省高校工程研究中心,福建三明365004;3.绿色铸锻及其高端零部件制造福建省2011协同创新中心,福建三明365004;4.福建省铸锻零部件工程技术研究中心,福建三明365004;5.漳州理工职业学院,福建漳州363000)
基于双模糊控制器的二自由度半主动悬架仿真研究
王孝鹏1,2,3,4,陈秀萍5,魏剑1,吴龙1,2
(1.三明学院机电工程学院,福建三明365004;2.机械现代设计制造技术福建省高校工程研究中心,福建三明365004;3.绿色铸锻及其高端零部件制造福建省2011协同创新中心,福建三明365004;4.福建省铸锻零部件工程技术研究中心,福建三明365004;5.漳州理工职业学院,福建漳州363000)
通过MATLAB软件建立基于二自由度主/被动悬架动力学仿真模型,计算出被动悬架簧载质量速度与悬架动行程位移作为主动悬架控制的输入量;半主动悬架采用双模糊控制策略算法,用加权系数分别控制第一主控力与第二主控力在总控制力中的比重;计算结果表明:采用双模糊控制策略算法在对改善悬架的总体性能有明显作用,车身垂直加速度、悬架动行程、俯轮胎动行程性能分别提升28.5%、9.9%、10.3%。
半主动悬架;路面模型;双模糊控制;
汽车行驶过程中,整车的平顺性与操纵稳定性取决于悬架系统特性的调教。悬架是车身与车轮之间的传力装置,在整车的行驶过程中只有在特定的行驶条件下,被动悬架状态才能达到最优状态,当路面的条件或者行驶的速度发生变化,悬架的最优状态会发生破坏,因此被动悬架的设计只能采取折中的方法进行解决。半主动悬架是近些年相关文献研究的一个趋势,相对主动悬架,主要通过改变减震器的可变力输出来控制整车的震动特性,其性能与主动悬架接近。相比主动悬架,其结构简单,能耗小。在实现主动力控制策略中,模糊智能控制与其他控制相比:使用语言方法,不需要精确地数学模型;鲁棒性好,适合解决过程控制中的高度非线性、强耦合时变滞后等问题;有较强的容错能力,具有适应受控对象动力学、环境特征和动行条件变化的能力;操作人员易于通过人的自然语言进行人机界面联系[1-5]。本文以半主动悬架为例,采用双模糊控制器对半车模型进行仿真研究并与被动悬架的性能对比。
1悬架模型
二自由度悬架模型简单,能较好的反映系统的垂直震动特性,与悬架的在行驶过程中的动态特性接近。在二自由度悬架模型的建立过程中,做如下假设:因此针对实际的车辆悬架系统,可作如下假设:(1)左右车轮受到的不平度垂直激励是一样的,车辆对其纵轴线左右对称,即车辆不存在侧倾振动,没有侧向位移,没有偏航角振动[6]。(2)车轴和与其相联的车轮视为非簧载质量,车轮在中心线上与路面为点接触;(3)由于轮胎阻尼相对于车辆减振器的阻尼来说,小到可以忽略,因此只考虑轮胎的刚度作用。(4)对于常见的四轮车辆,车辆悬架的质量分配系数为1,即前后轴非簧载质量相等[7],则车身简化后的前后两部分质量是彼此独立的。经过上述的假设后,整车模型即可转化为二自由度1/4车辆悬架模型来进行研究。简化后的二自由度悬架模型如图1所示。悬架参数如表1所示。

图1二自由度悬架模型

表1二自由度悬架参数
被动悬架的动力学方程如下:

主动悬架的动力学方程如下:

主控力计算方程如下:

式中:M为悬挂质量;m为非悬挂质量;K2为悬挂系统的弹簧刚度;C2为悬挂系统的阻尼系数;K1为轮胎的刚度;U为主动控制力;Z0、Z1、Z2分别为路面、车轮与车身位移。
根据(1)(2)式,建立被动悬架仿真模型如图2所示,在B级路面垂向位移输入下计算被动悬架模型的车身速度、车身加速度、悬架动行程。悬架速度、悬架东行程做为控制器的输入变量。根据5式,用车身加速度及悬架东行程计算预控主控里U的大小,对主动力U的变化范围进行界定并用模糊控制策略在此范围控制U的变化。

图2被动悬架方针模型
2路面模型
对悬架性能分析时需要输入路面模型。根据国家标准将公路等级分为8种,在不同的路段测量,很难得到两个完全相同的路面轮廓曲线。通常是把测量得到的大量路面不平度随机数据,经数据处理得到路面功率谱密度。产生随机路面不平度时间轮廓有两种方法,由白噪声通过一个积分器产生或者有白噪声通过一个成型滤波器产生。路面时域模型可用如下公式(3)描述;根据公式建立B级路面仿真模型如图3所示,B级路面垂直位移计算结果如图4所示。

式中q(t)为路面随激励;w(t)为积分白噪声;f0为时间频率;Gq为路面不平度系数;V为汽车行驶速度。

图3 B级路面时域仿真模型

图4 B级路面垂向位移
3双模糊控制器设计
采用双模糊控制器对主动控制力U进行控制。在控制过程中,以车身的速度V与期望值的误差及其变化率作为模糊控制器的第一输入量、U1第一主动力输出量;以悬架动行程Z2-Z1与其期望值的误差及其变化率作为第二个模糊控制器的输入量,U2作为第二主动力输出量。总控制力分别为第一、二主控制力输出之和,公式如下:

式中k1、k2为第一、二输出主控力权系数;k1大,主控力的输出已第一主控力输出为主,主要用来降低车身的加速度,此时整车行驶在较差的路面上;k2大,主控力以第二主控力输出为主,主要用来降低整车在行驶过程中的悬架动行程,且主控力越大,悬架动行程变化越小,此时整车行驶在较好的路面上切车速较高。
模糊控制规则是模糊控制器的核心,它用语言的方式描述了控制器输入量与输出量之间的关系。前后悬架的输入变量分别为车身质心速度及其变化量、车身俯仰角速度及其变化量、后悬架动行程及其变化量。采用7个语言变量规则来进行描述:负大(-3)、负中(-2)、负小(-1)、零(0),正小(1)、正中(2)、正大(3)。输出变量控制力U同样采取7个语言模糊集来进行描述:负大(-3)、负中(-2)、负小(-1)、零(0),正小(1)、正中(2)、正大(3)。
第一主控力控制器:悬架与车身连接处的速度、加速度的基本论域为:
E=[-0.06,0.06]、EC=[-0.6,0.6]
悬架与车身连接处的速度与期望值的误差及其变化率、量化因子分别为:
Ke=3/E=3/0.06=50;Kec=3/EC=3/0.6=5
第一主控力控制器:悬架动行程的位移、速度的基本论域为:
E=[-0.008,0.008]、EC=[-0.1,0.1]
悬架动行程的位移与期望值的误差及其变化率、量化因子分别为:
Ke=3/E=3/0.008=375;Kec=3/EC=3/0.1=30
根据5式,求出主主动力预控范围为:
U1=[-150,150];U2=[-30,30]
主动力的基本语言变量范围为:
E=[-3,3];
主控力U1、U2比例因子分别为:
K U1=U1/E=150/3=50;K U2=U2/E=30/3=10
当误差E为正时,实际值大于目标值;当误差E为负时,实际值小于目标值;当误差变化率EC为正时,实际值的变化趋势是逐步增大;当误差变化率EC为负时,实际值有逐步减小的趋势.当输出变量U为正时,有使实际值增大的趋势,当U为负时,有使实际值减小的趋势[3]。当误差大或较大时,选择控制量以尽快消除误差为主;而误差较小时,选择控制量时应注意防止超调,以系统的稳定性为主要考量。当误差为负而误差变化率为正时,系统本身已有减小这种误差的趋势,所以为尽快消除误差且又不引起超调,应取较小的控制量[7-8]。模糊化时各输入输出均采用三角形隶属函数,模糊推理采用Mandain法,解模糊采用重心法。
在MATLAB模糊控制模块输入模糊控制规则并搭建二维模糊控制结构子系统,模糊控制规则如表2所示。
整车在行驶过程中采用车身垂向加速度作为输入信号对主控力权系数k1、k2进行实时调节,根据ISO2631-1汽车平顺性评价标准,车身垂向加速度大于0.315 m/s2时以舒适性控制为主,小于0.315m/s2时以操控性控制为主。主控力权系数模糊控制规则如表3所示。根据公式7搭建悬架双模糊控制器输出控制力的仿真计算模型如图5所示。

表3主控力权系数模糊控制规则
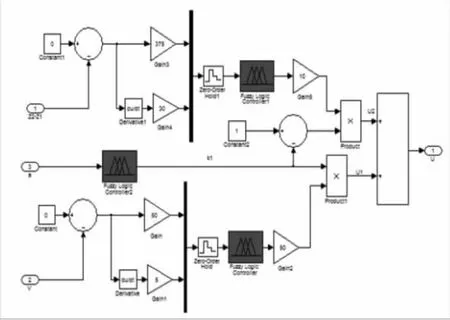
图5悬架主控力双模糊控制器
4仿真分析
根据二自由度被动悬架仿真模型与双模糊控制器模型,搭建二自由度主动悬架仿真模型如6所示。在B级路面上车辆以60km/h的速度直线行驶,计算主被动悬架的车身加速度、悬架动行程、轮胎动位移。主被动悬架计算结果如图7~9所示,其中蓝线为被动悬架计算结果,红线为主动悬架计算结果并在同一图中显示。仿真步长为0.005 s,仿真时间为10 s。

图6半主动悬架仿真模型
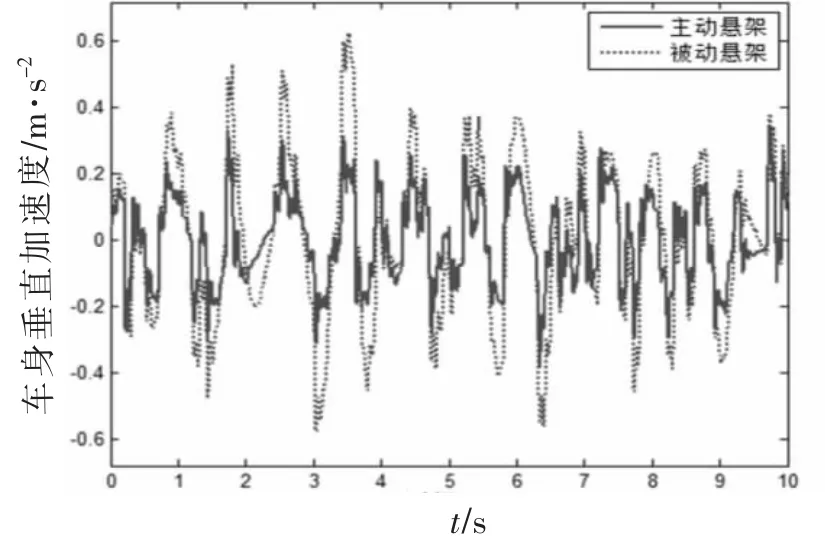
图7车身垂向加速度

图8悬挂动行程
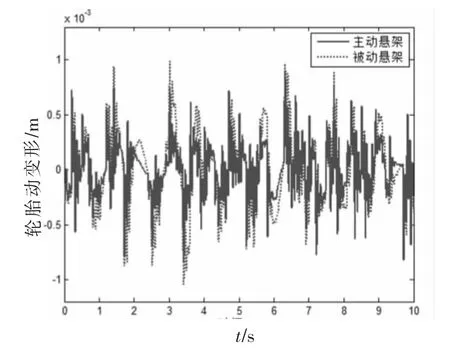
图9轮胎动变形
从计算结果可以看出,主动悬架相对于被动悬架在性能上整体都有所提升。其中车身垂直加速度,轮胎动位移性能提升明显,轮胎动位移减小,即轮胎的动载荷减小,提升轮胎与地面之间的接触特性,增加整车行驶过程中的操作稳定性。具体性能参数变化如表4所示。
图10~12车身加速度、悬架动行程、轮胎动位移对应的功率谱曲线。其中蓝线为被动悬架计算结果,红线为主动悬架计算结果并在同一图中显示。从功率谱曲线可以看出,整车运行过程中,主动悬架的幅值相对被动悬架都较小,同时可以看出,振幅最大值都出现在频率较小处,低频路面输入信息对整车的震动特性较大;车身加速度功率谱幅值在高频状态其幅值相对被动悬架有增加的趋势;悬架动行程功率谱幅值在频率小于1 Hz、大于90 Hz时其幅值相对被动悬架其幅值较大,在路面输入主要频率段幅值都相对被动悬架幅值有减小趋势。

图10车身加速度功率谱
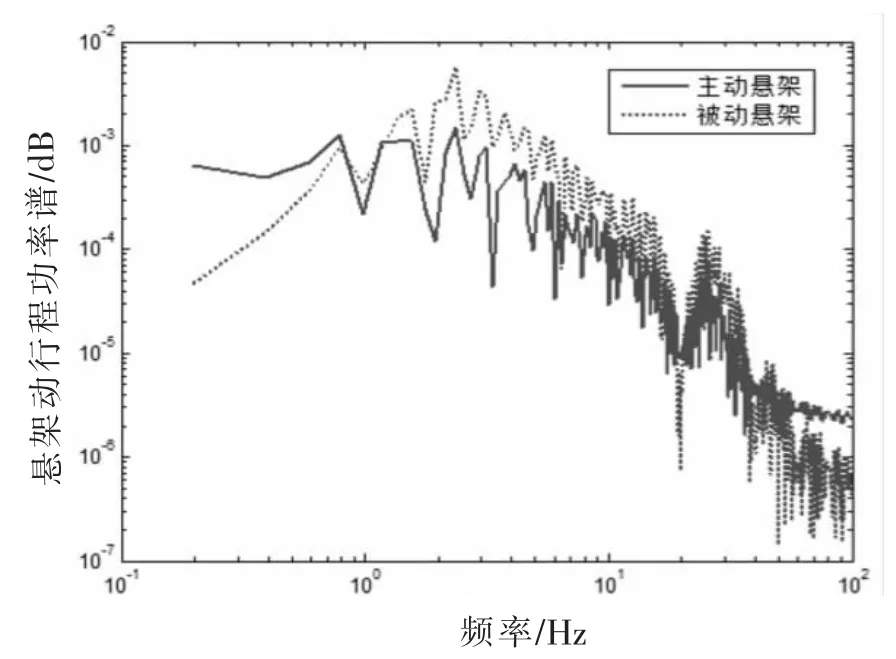
图11悬挂动行程度功率谱

图12轮胎动变形功率谱
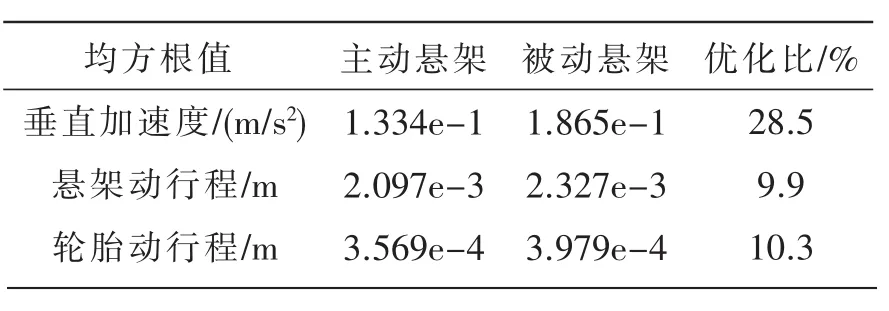
表4性能均方根值对比
5结论
本文通过建立二自由度主动悬架模型,提出双模糊控制策略概念,用加权控制系数控制总控制力的输出,同时控制各分主动力所占的比重,使整车在高低车速及好坏路面上都较好输出表现。通过计算分析,可得出如下结论:
(1)车身的垂直加速度、悬架动行程、前轮动位移都有很好的改善,其中车身垂直加速度改善非常明显,性能分别提升28.5%、9.9%、10.3%。
(2)车身的垂直加速度、悬架动行程、前轮动位移功率谱幅值在频率大于1Hz、小于90 Hz时,相对被动悬架幅值都较小;车身加速度功率谱幅值在高频状态其幅值相对被动悬架有增加的趋势;悬架动行程功率谱幅值在频率小于1Hz、大于90 Hz时其幅值相对被动悬架其幅值较大,在路面输入主要频率。
(3)第一主控力加权系数较大时,控制力以降低车身加速度为目标;第二主控力加权系数较大时,控制力以减小悬架动行程为目标,控制力越大,悬架变形越小。
(4)模糊控制器相对悬架参数不敏感、采用双模糊控制器整体综合性能优越,鲁棒性强。
[1]杨礼康.基于磁流变技术的车辆半主动悬挂系统理论与试验研究[D].杭州:浙江大学,2003.
[2]唐志桥.二分之一车辆悬架系统的动力学仿真研究[J].公路与汽运,2015,166(1):5-8.
[3]刘静.带天棚阻尼的1/2车辆主动悬架仿真研究[J].公路与汽运,2015,166(3):15-20.
[4]张洁.公路车辆与桥梁耦合振动分析研究[D].成都:西南交通大学,2007.
[5]HROVAT D.Optimal active suspensions for 3d vehiculemodels[C]//Proc of the American Control Conference,1991 (2):1534-1541.
[6]喻凡,林逸.汽车系统动力学[M].北京,机械工业出版社,2012:171-172.
[7]周兵,赵保华.汽车主动悬架自适应模糊PID控制仿真研究[J].湖南大学学报(自然科学版),2009,36(12):27-30.
[8]张昆,习文辉,邓文华,等.基于CarSim-Simulink联合仿的整车半主动悬架模糊控制仿真研究[J].昆明理工大学学报,2015,40(1):39-44.
(责任编辑:朱联九)
semi-active suspension;roadmodel;double fuzzy control
U 467.4
A
1673-4343(2016)06-0039-07
10.14098/j.cn35-1288/z.2016.06.007
2016-10-24
福建省属高校科研专项基金(JK2014048)
王孝鹏,男,山西运城人,讲师。主要研究方向:车辆系统动力学及控制。
