双闭环直流调速系统“抗饱和”速度控制器设计
2016-12-20张海明缪仲翠
张海明,缪仲翠
(兰州交通大学,兰州 730070)
双闭环直流调速系统“抗饱和”速度控制器设计
张海明,缪仲翠
(兰州交通大学,兰州 730070)
针对双闭环直流调速系统的速度控制器饱和非线性问题,首先将分数阶PIλ应用到速度控制器,并以PIλ为基础提出了Anti-Windup PIλ速度控制器,该方法根据控制器是否进入饱和有条件的将控制器的输出反馈到分数阶积分器,改变了分数阶积分控制状态,使控制器出现饱和时迅速的退出饱和。仿真试验表明,PIλ速度控制器比整数阶的PI提前退出饱和,缩短了调节时间,有效的抑制了超调,而Anti-Windup PIλ比分数阶PIλ有更好的动态性能。
直流电动机;饱和非线性;分数阶PIλ;抗饱和PIλ控制器
0 引 言
直流电动机因其优良的机械特性和容量范围大等特点广泛的应用于各个领域中,如大型可逆轧钢机、卷扬机、电力机车、航空航天、机器人、生物医学工程等。双闭环直流调速系统控制结构简单、工作可靠,有优良的动、静态性能,可以在给定的调速范围内实现无静差调速,在调速领域内得到广泛的应用。但其动态性能的不足之处就是转速必然超调。而有的控制对象不能有长时间的超调或不能出现超调现象。为了抑制超调,常采用速度微分反馈等方法[1],该方法对速度传感器要求较高,而且超调量和快速性相互矛盾,微分在反馈通道易引入扰动,使系统抗干扰能力减弱。也有利用智能算法抑制超调的[2],但是控制的实时性有影响。
在实际应用中,经典PID广泛地应用在直流调速系统中,因其结构简单,只要调节比例、积分、微分的系数就可以满足不同控制对象要求,具有很强的生命力[3]。近几年,学者们对分数阶PID进行了广泛的研究,分数阶PID控制器由I.Podlubny 教授提出[4]。将分数阶理论和PID相结合的分数阶PID控制器近年来已应用到各领域,由于分数阶PID比整数阶PID多了两个可调参数,增大了调节自由度,比整数阶PID更优良的性质[5-6]。
本文针对基于整数阶PI的双闭环调速系统中的超调现象进行了分析研究,根据分数阶积分的特殊性,为了缩短速度控制器饱和时间,减小速度超调现象,首先将分数阶PIλ应用到双闭环调速系统的速度控制器。为了进一步的缩短控制器的饱和时间,减小速度输出的超调,设计了抗积分饱和分数阶PIλ(Anti-Windup PIλ)控制器,即根据分数阶PIλ的输出是否饱和,将饱和非线性环节的输入与输出量的差值有条件地反馈到分数阶积分器的输入端,对分数阶积分状态进行控制。使控制器在进入饱和后,能够更加快速地退出饱和,达到减小超调量的目的。论文在MATLAB/Simulink平台上仿真试验表明PIλ比常规整数阶PI缩短了控制器的饱和时间,减小了输出的超调量,缩短了系统的稳态调节时间,而Anti-Windup PIλ比PIλ能更快的退出饱和,进一步额提高了系统的动态性能。
1 双闭环直流调速系统的数学模型
转速、电流双闭环控制直流调速系统是性能好、应用最广泛的直流调速系统。为了即实现速度调节性能又实现电机在设备物理条件下最快速的起动,系统设置了转速外环和电流内环,具体结构如图1所示[7]。

图1 双闭环直流电机调速系统
电流环作为内环控制器,为加快动态过程保证电机在动态过度时维持在电机允许的最大电流[7],在速度外环的调节过程中,电流环起跟随作用,一般用PI调节器。
速度控制器(ASR)的输出是电流控制器(ACR)的给定输入。对于调速系统,电动机允许过载能力限制下的恒流起动,为了实现电机的快速起动,将ASR的输出限制在电动机允许的最大电流。在突加给定时ASR输出超过电机最大电流值时会使ASR陷入饱和状态。此时,ASR对速度没有调节能力,会引起系统的超调、动态响应变长,甚至使系统不稳定。而只有出现速度的负偏差时控制器才能逐渐退出饱和并进行速度调节。
2 速度控制器设计
速度控制器是系统的主导控制器,能使电机转速快速的跟随给定值,并在稳态时减小速度静差,实际应用中一般采用整数阶的PI控制器,可实现转速无静差。但是在动态过程中不可避免的会出现超调现象。
2.1 分数阶速度控制器设计
实际应用中为了实现电机的无静差调速,速度控制器一般使用整数阶的PI,为了进一步改善速度调节的动态性能,将速度控制器设计为分数阶的PIλ,整数阶和分数阶控制器的具体形式:
式中:Kp,Ki比例和积分器的系数,λ∈(0,1)为积分的分数阶阶次,当λ=1时,为整数阶PI。可见分数阶的PIλ比整数阶的PI多了一个可调参数,也就是增加了控制器的调节自由度,可以提高控制器设计的灵活性和准确性。为了数字实现分数阶控制器,用高阶递推滤波器Oustaloup来近似分数阶控制器[8]。
2.2 Anti-Windup PIλ速度控制器
不管是整数阶PI还是分数阶PIλ控制器,当有阶跃输入时控制器都容易进入饱和状态而影响系统的控制性能。因此在分数阶PIλ控制器基础上设计Anti-Windup PIλ控制器,如图2所示。un是限幅前的控制器的输出,us是经过限幅后的实际输出。当|us|>|un|时,说明控制器进入了饱和状态,通过有条件的通过负反馈作用改变积分器的状态,从而使控制器尽快退出饱和。
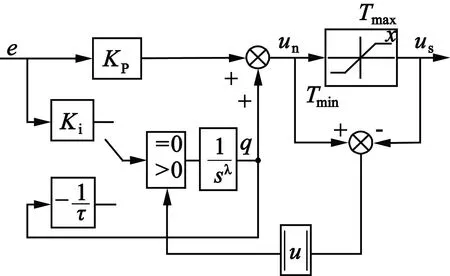
图2 Anti-Windup PIλ速度控制器
3 仿真试验
为了验证PI、PIλ和Anti-Windup PIλ三种控制器对积分饱和的控制效果,本文在MATLAB/Simulink环境下,根据实际的直流电机模型建模并进行仿真验证。直流电机及控制系统的参数如表1所示。控制器的饱和主要是因为突加给定引起的,因此,论文对3种控制器分别在电机阶跃输入和运行中速度变化的两种情况进行了仿真试验。
3.1 控制器参数确定
为了控制器之间比较合理性,PI和PIλ参数的确定都利用粒子群智能寻优算法,并选取相同的寻优指标,具体参数选取如论文[9]。对于Anti-Windup PIλ的参数的选取采用“二步法”,即在不考虑系统饱和时对控制器的参数进行整定,然后加入抗饱和部分,适当的选取抗饱和时间常数(抗饱和时间常数一般取积分时间常数附近)来最终达到预期的效果。
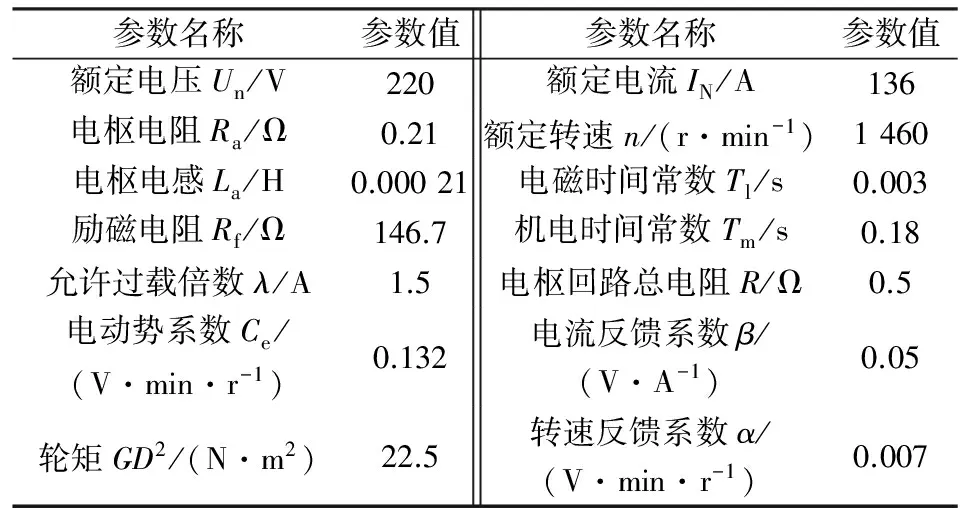
表1 直流电机及控制系统的参数[8]
3.2 电机起动
双闭环直流调速系统的主要特点就是“准时间最优”,即速度控制器在起动达到饱和时通过电流闭环使电机电枢电流保持在最大值,系统能在物理设备允许的条件下最快的起动。当电机起动时,在3种控制器作用下系统的输出如图3、图4、图5所示。图3为速度控制器的输出,即为电流控制器的给定输入。图4为直流电机的实际的电枢电流。图5为电机的实际额定转速输出。在3种控制器作用下,双闭环调速系统起动时有如下的特点:
(1) 由图3可知,整数阶PI的ASR输出在退出饱和后有明显的波动,此时电机电枢电流(图4所示)和电机的转速(图5所示)都有明显的波动,而且电机转速有明显的超调现象,稳态调节时间较长。
(2) 由图3可知,ASR为分数阶PIλ明显的比整数阶PI提前退出饱和,Anti-Windup PIλ又比分数阶PIλ提前退饱和,系统的稳定调节时间整数阶PI为0.55 s。PIλ为0.35 s,Anti-Windup PIλ为 0.28 s,可见尽管PIλ和Anti-Windup PIλ提前退出了饱和,不但没有影响起动的快速性,而且Anti-Windup PIλ的调节时间最短,而整数阶PI的调节时间最长。
(3) 由图4可知,电流闭环在速度控制器进入饱和时为主导控制环,起动时保持了最大电流,当速度控制器退出饱和时,PI速度控制器的电枢电流有明显的波动,而其它两种控制器的电流比较平稳。
(4) 由图5可知,ASR为Anti-Windup PIλ时电机的速度输出最稳定,但是Anti-Windup PIλ中引入了参数τ,参数的τ的大小影响速度的稳态静差。而整数阶PI的输出有明显的超调。

图3 空载起动时速度控制器输出图4 空载起动时电机电枢电流

图5 空载起动时电机转速
3.3 电机变速运行
在实际应用中,电机常会在不同转速下运行,即变速运行。图6为电机变速时的速度给定输入,当电机低速起动后在0.3 s处加速到额定转速,运行一段时间后在1 s处降到低速运行。此时电机的输出状态如图7、图8、图9所示。

图6 变速时电机的速度给定曲线图7 变速时速度控制器输出

图8 变速时电机电枢电流图9 变速时电机转速
(1) 如图7所示,当电机起动、加速时三种控制器都进入了正向饱和状态,而电机降速时都进入反向饱和状态。不管是正向还是反向饱和状态,整数阶PI都会出现明显的超调波动,而分数阶PIλ和Anti-Windup PIλ都明显的提前退出饱和,并且输出稳定没有波动。
(2) 由图8可知,当电机降速时电机电流反向,并很快进入反向饱和状态,电流保持负的最大值,保证电机快速的制动。此时整数阶PI的电流有超调波动,而分数阶PIλ和Anti-Windup PIλ明显的比整数阶PI提前退出饱和,而且Anti-Windup PIλ饱和时间最短。
(3) 由图9可知,当电机变速时,分数阶PIλ和Anti-Windup PIλ能较稳定的跟随上速度给定,速度值没有明显的超调和波动,调节时间短很快的达到了稳定。但是整数阶的PI速度输出不管是在升速还是降速都有明显的超调,并且调节时间较长。
4 结 语
本文针对双闭环直流调速系统的速度闭环的非线性饱和问题,根据目前实际现场常用的整数阶PI速度控制器在给定突变时会引起速度超调、稳态调节时间较长等动态性能变差的现象,将分数阶PIλ控制器应用到了双闭环调速系统的速度控制器。为了进一步的提高系统动态性能,设计了Anti-Windup PIλ速度控制器。在MATLAB/Simulink环境下分别对PI、PIλ和Anti-Windup PIλ控制器进行了仿真分析,通过分析比较控制系统起动和变速运行时速度控制器输出、电机电枢电流和速度输出曲线可知,PIλ明显的比整数阶PI提前退出饱和,并且电枢电流和转速输出都能稳定跟随上输入,没有超调现象,调节时间短,适合于不能长时间饱和、无超调的工业现场应用。而Anti-Windup PIλ比PIλ提前退出饱和,其电枢电流和转速的稳定性都优于PIλ,因对超调和调节时间有严格要求的控制系统更适合用Anti-Windup PIλ速度控制器。
[1] 唐拥林.环直流电机调速系统设计改进[J].煤矿机械,2016,37(3):18-20.
[2] 李 勇,罗隆福,许加柱,等.基于模糊控制的直流电机 PWM 调速系统[J].大电机技术,2006(1):66-68.
[3] 薛定宇,赵春娜.分数阶系统的分数阶PID控制器设计[J].控制理论与应用,2007,24(5):771-776.
[4] PODLUBNY I.Fractional-order systems and controllers[J].IEEE Transaction Automatic Control,1999,44(1):208-214.
[5] PAN S Das.Intelligent fractional order systems and control[J].Studies in Computational Intelligence,Springer,2013 .
[6] MONJE C A,CHEN Y ,VINAGRE B M ,et al.Fractional-order systems and controls:fundamentals and applications[J].Advances in Inudstrial Control,Springer,2010 .
[7] 陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2009:1-2.
[8] 薛定宇.控制系统计算机辅助设计[M].3版.北京:清华大学出版社,2012.
[9] 缪仲翠,党建武,张鑫,等.PSO优化分数阶PIλ控制的双闭环直流调速控制[J].计算机工程与应用,2015,51(7):252-257.
Anti-Windup Speed Controller Design for Double Close-Loop DC Motor Control System
ZHANG Hai-ming,MIAO Zhong-cui
(Lanzhou Jiaotong University,Lanzhou 730070,China)
Aiming at the saturation nonlinearity of the speed control loop for double closed-loop DC motor control system, First, fractional order PIλis applied to speed controller, and on the basis of PIλ, Anti - Windup PIλspeed controller is proposed. The proposed method separately control the integral state by feedbacking the output of the Controller to the input port of the fractional order integrator according to whether the controller output is saturated or not, which can make the system leaving saturation as soon as possible. Simulation results show that PIλSpeed Controller is exited saturation earlier than PI Speed Controller, the overshoot and settling time of the system are reduced. And the control performance of Anti-Windup PIλsuperiors to the PI and PIλcontrol method.
DC motor; saturation nonlinearity; fractional PIλ; anti-windup PIλcontroller
2016-06-02
甘肃省自然科学基金项目(1310RJZA037);甘肃省高等学校基本科研业务费专项资金
TM33
A
1004-7018(2016)10-0070-04
张海明(1963-),男,高级工程师,主要研究方向为检测技术自动化。