基于多传感器的列车里程计定位误差检测及校正方法
2016-12-19吴昕慧陶汉卿
吴昕慧 蔡 煊 陶汉卿
(1.柳州铁道职业技术学院电子工程系,545616,柳州;2.西南交通大学牵引动力国家重点实验室,610031,成都∥第一作者,副教授)
学术专论
基于多传感器的列车里程计定位误差检测及校正方法
吴昕慧1蔡 煊2陶汉卿1
(1.柳州铁道职业技术学院电子工程系,545616,柳州;2.西南交通大学牵引动力国家重点实验室,610031,成都∥第一作者,副教授)
城市轨道交通列车运行过程中,轮对空转/滑行和车轮磨损是造成车载里程计测速测距误差的主要原因,因此里程计定位误差的检测和校正主要是对列车空转/滑行和车轮磨损的检测和误差校正。通过城市轨道交通列车定位需求分析以及传感器定位特性分析,在列车里程计基础上引入多普勒雷达,采用二者构建车载组合定位系统。基于H滤波理论实现两种传感器量测信息的融合处理,得到列车定位参数的最优估计,在此基础上,利用空转/滑行和车轮磨损检测方法完成相关检测并对误差进行校正。仿真试验结果验证了本方法的有效性,达到了模型的预期设计目的,提高了车载定位系统的自主定位能力。
多传感器信息融合; 列车定位; 里程计;H滤波
First-author′s address Department of Electronic Engineering,Liuzhou Railway Vocational Technical College,545616,Liuzhou,China
安全和高效是城市轨道交通系统追求的两大目标,列车能否安全、高效地运行很大程度上取决于其运行控制系统的性能。城市轨道交通列车的车载控制器(Vehicle On-board Controller简为,VOBC)主要由ATP(列车自动防护)和ATO(列车自动运行)组成,车载ATP的主要功能是根据列车即时速度和走行距离控制列车运行间隔、防止列车超速运行,保证列车运行安全。车载ATO的主要功能是根据列车即时速度和走行距离控制列车舒适、节能、高效地运行。可见,列车速度和走行距离信息是保证VOBC系统功能正常的基本参数,其精度和可靠性直接影响列车的运行安全和效率。
目前,城市轨道交通列车普遍采用的车载定位传感器是里程计(Odometer),其通过记录车轮的转动可以准确测量列车的即时速度和走行距离,但由于其安装在车轮轮轴上,当轮对发生空转/滑行或车轮磨损严重时里程计会产生较大的测速测距误差。轮对空转/滑行和车轮磨损是造成里程计定位误差的主要原因[1],因此里程计定位误差的检测和校正主要是对列车空转/滑行和车轮磨损的检测和误差校正。针对空转/滑行和车轮磨损造成的里程计测速测距误差问题,传统方式一般是采用轨旁定位设备(例如地面应答器、轨间环线等)向列车辅助提供精确位置信息,修正里程计的测距累积误差,但这种方式的缺点也很明显,无法提供速度校正,建设和维护成本高且不支持线路的动态配置变化[2]。
随着列车运行控制技术的发展,如何在尽量减少轨旁定位设备的情况下保证车载定位系统的精确、可靠和连续定位能力成为当前列车定位技术的研究热点[3]。显然单独依靠里程计无法实现这一目标,而采用多个不同类型的车载传感器构成组合定位系统是一种有效、可行的方法。利用不同传感器的优势,取长补短,不仅能满足列车定位的精度要求,而且能达到列车定位的可靠性以及对时间和空间连续性和可用性的要求[4]。在构建车载组合定位系统时,也并不是采用的传感器数量和种类越多越好,传感器太多反而使系统成本过高且计算负担过重,需综合考虑定位精度、稳定性、可维护性、抗干扰性、机动性以及设备投资成本等因素,根据城市轨道交通列车定位的具体需求选择合适的传感器组合方案。如何将多传感器信息有效融合得到高精度的列车定位参数估计值,也是多传感器组合定位系统的关键问题,合适的信息融合方法将显著提高组合定位系统的性能。
针对空转/滑行和车轮磨损造成的里程计定位误差问题,本文通过分析,在里程计基础上引入多普勒雷达,采用二者构建车载组合定位系统。基于H滤波理论实现两种传感器量测信息的融合处理,得到列车定位参数的最优估计,在此基础上,利用空转/滑行和车轮磨损检测方法完成相关检测并建立数学模型对误差进行校正。
1 城市轨道交通列车运行环境及定位需求分析
(1) 城市轨道交通列车的运行线路相对普通铁路要简单的多,可近似看作是一维的,故只要测量出列车走行距离并结合线路数据库即可确定列车在线路中的具体位置。
(2) 由于大中城市土地资源普遍紧张,城市轨道交通一般采用地铁形式,无法保证列车可靠、不间断地接收到地面上的电磁波信号,因此GPS(全球定位系统)等卫星导航定位方式在地铁列车中并不适用。
(3) 城市轨道交通列车运行速度相对较低,一般为80 km/h左右,但随着CBTC(基于通信的列车控制)系统和移动闭塞制式在城市轨道交通中的应用和发展,列车追踪间隔进一步缩短,小编组、高密度的行车组织模式对列车定位的精确性和可靠性提出了更高的要求[5]。
(4) 地铁列车的运行环境虽然没有普通铁路复杂,但同样存在轮对空转/滑行和车轮磨损影响里程计测速测距精度的问题。安装精度、列车振动和轨面状况等因素会影响雷达的测速精度,加速度计由于安装角度误差和列车振动等原因也会产生测量误差。可见,单一种类的传感器都存在各自的缺陷,无法独自完成高可靠和高精度列车定位,采用不同类型的传感器通过优势互补实现列车组合定位是城市轨道交通列车定位的发展趋势。
2 车载传感器组合方案
2.1 里程计
里程计成本低、简单实用,在列车测速测距领域应用成熟,本文采用车载HS221G1A型轮轴脉冲传感器,测速范围为0~20 kHz,测速测距计算公式为:
(1)
(2)
式中:
D——车轮直径,mm;
N——车轮每转一圈传感器所发出的脉冲个数;
T——测速周期,ms;
Δn——本周期脉冲测量个数。
由式(1)、(2)可见,车轮直径是必不可少的计算参数,但随着列车的运行车轮会逐渐磨损导致轮径变小,如果不对带入公式计算的轮径值及时修正,则会造成列车速度和走行距离的计算误差,而且测距误差会随着列车的运行累积增加。另外,由于里程计是通过测量车轮转速脉冲得到车轮转动速度,当列车正常运行时车轮转速和车体走行速度基本相同,但当车轮发生空转/滑行时,里程计的脉冲测量误差会显著增大,车轮转速和车体实际走行速度之间会出现较大偏差。
由式(2)可知,由里程计得到的任意时刻列车走行距离增量计算值ΔS中都包含有轮径误差δD和脉冲计数误差δΔn所造成的误差,因此完成空转/滑行检测并补偿脉冲计数误差以及校正轮径误差是基于里程计的列车定位必须要解决的问题。基于里程计的列车定位流程如图1所示[6]。

图1 基于里程计的列车定位流程
2.2 多普勒雷达
多普勒雷达(Doppler radar)测速是通过安装在机车底部的车载雷达向轨面发射电磁波并接收反射回来的回波信号,基于多普勒频移效应原理通过测量雷达发射波和反射波的频率差(多普勒频移量)便可计算得到列车的即时速度,对速度积分可求得列车走行距离。本文采用DRS05a型车载雷达,测速范围为0.2~600 km/h,测速计算公式为:
(3)
式中:
fr——多普勒频移量,Hz;
θ——雷达发射波与轨道平面夹角,(°);
λ——雷达发射波波长,m。
多普勒雷达测速测距完全不受轮对空转/滑行和车轮磨损的影响,误差来源主要是列车纵向振动以及雷达安装精度误差。在列车高速运行时,由于多普勒效应明显比雷达测速精度较高,高速时较低速时轮对空转/滑行更频繁,因此里程计精度相对偏低;在列车低速运行时,里程计精度较高,而雷达由于多普勒频移效应不明显精度偏低。因此,多普勒雷达与里程计的测距精度具有互补性。
2.3 车载组合定位系统
通过上述分析,本文采用里程计和多普勒雷达构成车载组合定位系统,采用2个里程计的冗余配置以提高系统可靠性,列车纵向振动是造成多普勒雷达测速误差的主要原因,为有效减少此误差,以詹纳斯配置方式[7]配置2个雷达。以3取2车载ATP安全控制平台为例,车载组合定位系统硬件结构如图2所示。

图2 车载组合定位平台硬件结构
3 组合定位信息融合算法
传感器自身得到的测速定位数据由于误差的普遍存在不是完全精确可靠,系统精度和可靠性有限,而采用信息融合处理算法可以有效消除各种随机干扰和误差对测量精度的影响,得到高精度和高可靠的列车定位估计值,大大提高组合定位系统的性能。
3.1H滤波融合算法建模
卡尔曼滤波理论在信息融合领域应用较广泛,但其要求假设噪声输入为严格的高斯序列,而在城市轨道交通的具体应用环境中干扰信号的特征是未知的,因此采用卡尔曼滤波进行信息融合易发生滤波发散,鲁棒性不强。而H滤波理论通过将H范数引入到滤波问题中,构建一个滤波器使得从干扰输入到滤波误差输出的H范数最小化,系统噪声和量测噪声都不必做任何假设,滤波估计的鲁棒性大为提高[8]。
H滤波将外部噪声看作是能量有限的随机信号,使系统的干扰到估计误差的闭环传递函数的H范数小于给定的正数γ。对于如下离散系统。
式(4)为各传感器的公共状态方程。
X(k)=φ(k,k-1)X(k-1)+ΓW(k-1)
(4)
式中:
X(k)——列车状态,本文取列车速度v(k)为状态变量;
φ(k,k-1)——状态一步转移矩阵;
Γ——系统噪声驱动阵;
W(k)——系统噪声。
式(5)为各传感器的量测方程。
Zi(k)=HiX(k)+Ni(k)
(5)
式中:
Zi(k)——各传感器列车状态变量的量测输出;
Hi——量测矩阵;
Ni(k)——量测噪声,i=(odo,rad)。
Si(k)=Li(k)X(k)
(6)
式中:
Li(k)——给定系统状态变量的线性组合。
H滤波不需对噪声统计特性做任何假设,W(k)和Ni(k)以及系统初始状态X(0)均可看作系统的未知干扰输入。


(7)
(8)
P(k)-1+HTH-γ-2LTL>0
(9)
则H滤波递推公式如下[7-9]:
状态估计值:

(10)


(11)
滤波增益矩阵:
K(k)=P(k,k-1)HT(HP(k,k-1)HT+I)-1
(12)
Riccati方程求解:
P(k,k-1)=φP(k-1)φT+ΓΓT-φP(k-1)
(13)
估计误差方差阵:
P(k)-1=P(k,k-1)-1+(HTH-γ-2LTL)
(14)
P的初值P(0)由下式求得:
φP(0)+P(0)φT-P(0)
(HTH-γ-2LTL)P(0)+ΓΓT=0
(15)
式(9)-式(14)中:


P(k,k-1)——一步预测值的误差方差阵;
K(k)——滤波增益矩阵。
3.2 基于联合H滤波的列车组合定位
本文设计的列车组合定位系统采用联合H滤波结构对各传感器信息进行融合,联合H滤波结构与联邦卡尔曼滤波结构相似,由一个主滤波器和若干个子滤波器组成。各个子滤波器的状态方程使用公共状态方程式(4);各传感器量测方程为式(5)和式。
每个传感器的量测信息利用H滤波递推公式(10)—式(15),通过相应的子滤波器单独进行滤波估计,得到各自的列车运动状态局部估计i和协方差阵Pi,再送入主滤波器融合得到列车运动状态全局估计g和协方差阵Pg:
(16)
(17)
式中:

Pg(k)——全局估计的估计误差方差阵。
联合滤波结构通过并行运行的子滤波器分散了系统的计算量,保证了滤波估计的实时性,且在某一子系统发生故障时各个子滤波器相互独立的计算结果可以有效防止故障污染整个系统。组合定位系统信息融合结构如图3所示。
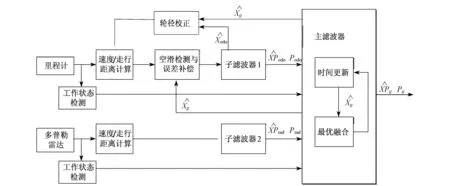
图3 组合定位系统信息融合结构
4 里程计定位误差检测及校正
4.1 空转/滑行检测及误差校正

(18)
设定列车空转时滑行率临界检测值为λslip,列车滑行时滑行率临界检测值为λslide,当λslip<λ(k)<λslide时判定列车未发生空转/滑行;当λ(k)≤λslip时判定列车发生空转;当λ(k)≥λslide时判定列车发生滑行。

4.2 车轮磨损检测及误差校正

5 仿真验证
设定列车初始轮径值为856 mm,轮径测量误差为±2 mm,轮径线磨损速率φD=0.005 mm/s,采用里程计和多普勒雷达作为速度信号的采集输入,系统平台的信号采集周期为100 ms,采集周期误差±3 ms,信息融合周期为1 s,γ=2.3(通过多次试验确定)。列车初始位置为东经109.17°、北纬25.03°,以80 km/h向正东方向运行。
5.1 仿真环境
在实验室环境下搭建了整个车载VOBC仿真测试平台,平台由3取2结构的车载ATP、双机热备结构的车载ATO、里程计、多普勒雷达、车辆动力学模型仿真软件、ATR(列车自动调整)仿真软件、区域控制器仿真软件和人机交互界面(DMI)组成,平台结构如图4所示。

图4 车载VOBC仿真测试平台
5.2 列车运动模型建立
所建立的列车运动模型既要便于数学处理,又要尽量逼近列车的实际运动状态。由于列车正常运行情况下都可以用匀速或匀加速运动来描述,而匀速运动可以近似看作是加速度为高斯白噪声的匀加速运动,因此本文采用匀加速运动模型来描述列车的运动状态[12]:
(19)
式中:
s(k)、v(k)和a(k)—分别为k时刻列车的位移、速度和加速度;
ws(k)、wv(k)和wa(k)——分别为k时刻影响列车位移、速度和加速度的系统噪声。
令:
则为式(4)所描述的列车离散状态方程。式(5)所描述的传感器量测方程,具体的矩阵形式为:


5.3 仿真结果及分析
根据以上仿真参数和仿真环境对本文设计的模型进行仿真,仿真结果如图5所示。
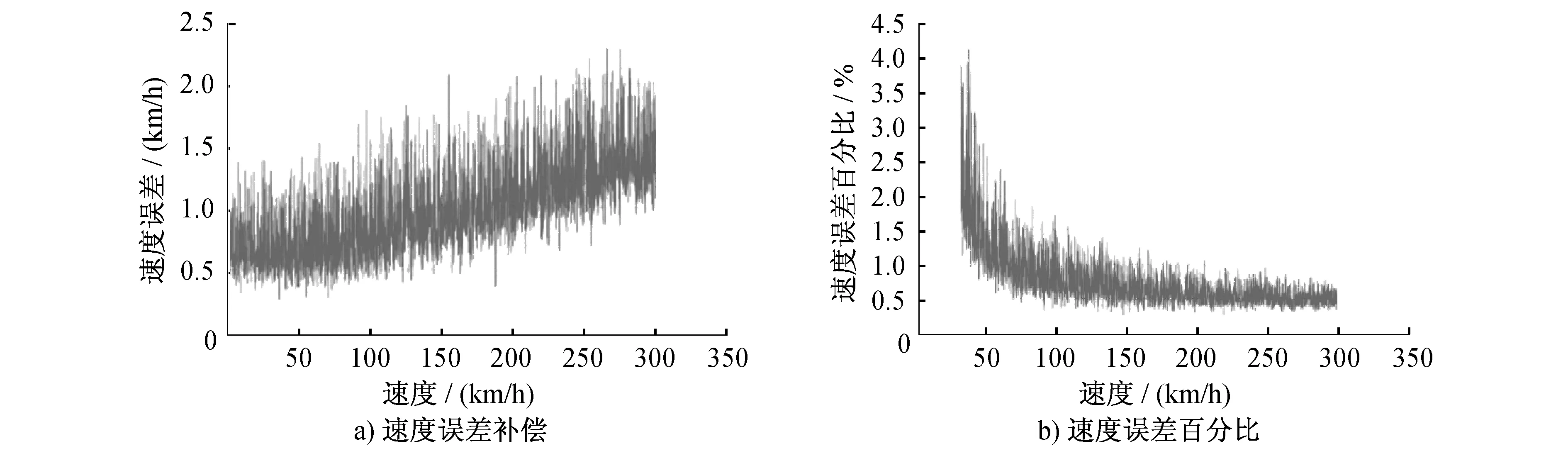
图5 测速误差仿真结果
由图5a)可见,在测速轮对发生空转/滑行的过程中,本文设计的模型对测速的误差补偿总体趋势上是随着列车速度的增大而增大,且测速精度小于3 km/h,达到了IEEE 1 474.1规范对车载ATP测速精度的要求[14]。由图5b)可见,随着列车速度的增大,测速误差的百分比呈现逐渐变小的趋势,符合本文模型所预期的变化趋势。
仿真测试时,将定位系统中的轮径初始值设定为810 mm,列车每运行100 m进行一次轮径校正并记录校正结果,仿真结果如表1所示。
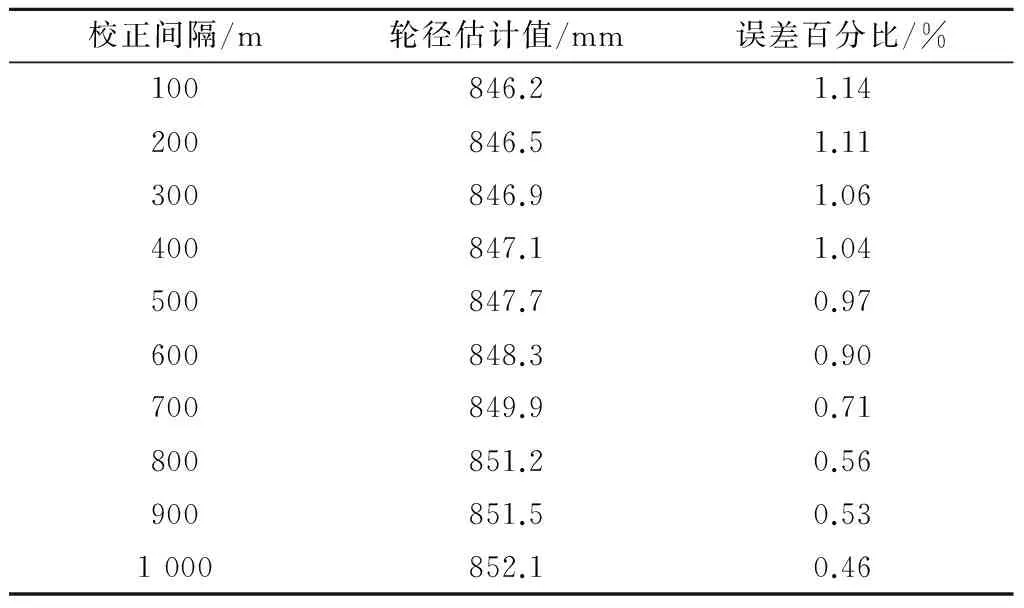
表1 轮径校正结果
通过表1可见,当列车运行到500 m时,轮径估计值与初始轮径的真实值(856 mm)的误差已经降低到真实值的1%以下;当列车运行到1 000 m时,轮径估计值与初始轮径的真实值的误差已经降低到真实值的0.5%以下。可见随着列车运行里程的增长,轮径估计值与真实值之间的误差逐渐减小,轮径估计值逐渐接近真实值,证明了本文提出方法的有效性。
6 结语
针对列车运行过程中轮对空转/滑行和车轮磨损造成的里程计测速测距误差问题,采用里程计和多普勒雷达构建车载组合定位系统,结合空转/滑行和车轮磨损检测及校正方法实现相关检测和误差校正。仿真实验结果验证了本文所提出方法的有效性,满足列车运行控制系统对列车定位的精度要求,提高了车载定位系统的自主定位能力。随着多普勒测速雷达价格降低、体积减小、精度提高,里程计和多普勒雷达相结合的车载组合定位方案在城市轨道交通列车定位领域会得到更多的实际应用。
[1] 乔超,唐慧佳.列车里程计定位方法的研究[J].兰州铁道学院学报,2003,22(3):116.
[2] 殷琴,蔡伯根,王剑,等.GPS/ODO列车组合定位系统[J].现代电子技术,2010(19):168.
[3] PETR E,ROMAN M,LIBOR P.Train Locator Using Inertial Sensors and Odometer[C]∥IEEE Intelligent Vehicles Symposium.Italy:2004:860.
[4] 周达天.基于多传感器信息融合的列车定位方法研究[D].北京:北京交通大学,2007.
[5] 刘锋.基于通信的列车控制模式下的列车定位新技术[J].城市轨道交通研究,2012(4):48.
[6] 刘江,蔡伯根,王剑,等.基于灰色理论的列车组合定位轮径校准方法研究[J].铁道学报,2011,33(5):54.
[7] 张振兴.城市轨道交通中的列车定位方法研究[D].北京:北京交通大学,2008.
[8] 曹长虹.城市轨道交通列车定位方法研究[D].兰州:兰州理工大学,2011.
[9] 高渐强,顾桂梅.基于改进H滤波算法的列车组合定位方法研究[J].城市轨道交通研究,2013(3):30.
[10] 彭俊彬.动车组牵引与制动[M].北京:中国铁道出版社,2007.
[11] 张辉.基于GNSS/ODO的列车定位方法研究[D].北京:北京交通大学,2008.
[12] 郭自刚,赵建波,倪明.基于嵌入式多信息融合的列车测速定位系统[J].计算机工程,2013,39(12):11
[13] 赵磊,张小林.列车测量定位误差的仿真研究[J].城市轨道交通研究,2014(3):35.
[14] Rail Transit Vehicle Interface Standards Committee of the IEEE Vehicular Technology Society.IEEE 1474.1TMIEEE Standard for Communications-Based Train Control(CBTC)Performance and Functional Requirements[S].the United States of America:the Institute of Electrical and Electronics Engineers,Inc,2005(2):18.
Detection and Correction Method of Train Odometer Positioning Error Based on Multi-sensor System WU Xinhui, CAI Xuan, TAO Hanqing
During the operation of urban rail transit train, wheel slip/slide and wheel abrasion are considered as the main causes for odometer error in speed and distance measurement, so the detection and correction for odometer positioning error is mainly put on wheel slip/slide, on wheel abrasion detection and error correction. Through an analysis of rail transit train location requirement and sensor positioning behavior, the doppler radar and odometer constitute train integrated positioning system are installed. Based on H filtering theory, the fusion of two sensor measurement information is achieved and the train moving state optimal estimation parameters obtained. Then, the wheel slip/slide and wheel abrasion detection method is used to complete the correlation detection and error correction. Simulation results demonstrate that the effectiveness of the proposed method, which could improve the designed independent positioning capability of vehicle on-board positioning system.
multi-sensor information fusion; train location; odometer;Hfilter
U 231.6
10.16037/j.1007-869x.2016.05.005
2015-11-18)