模块化建筑起模系统
2016-12-13吴东东范久臣
吴东东,范久臣
(1.青岛科技大学 自动化学院,山东 青岛 266042;2.北华大学 机械工程学院,吉林 吉林 132021)
模块化建筑起模系统
吴东东1,2,范久臣2*
(1.青岛科技大学 自动化学院,山东 青岛 266042;2.北华大学 机械工程学院,吉林 吉林 132021)
设计了起模机构的起升/顶升装置以及尺寸调节装置。液压缸和液压马达组成了液压控制系统。通过ansys软件对顶升机构进行了强度分析以及压杆稳定性校核。采用RecurDyn动力学仿真实现了尺寸调节的动态过程。
模块化建筑;起模系统;液压系统
0 引 言
模块化建筑作为一个新兴行业,具有非常巨大的市场潜力。模块化建筑需要模块化墙体的制作和运输的保证,其中,在制作中的起模过程急需能够自动完成全过程的自动化机设备。目前,国内在模块墙体制作中大多使用传统的起模设备,设备自动化程度低,效率也不高,浪费人力。我们在传统起模机构的基础上加入了针对不同模块墙体大小的尺寸调节装置,并对整个装置的机械结构和液压系统进行了设计和改进,使之能更好地满足使用要求。
1 系统的主要结构和性能指标
1.1 起模系统机械结构
液压起模系统主要靠液压缸实现不同的动作,即实现对模块的翻转起升和顶升脱离动作。起升液压系统主要靠两个与底座相铰接的液压缸伸缩来实现功能。需要用不同的阀来实现调速功能和锁死功能。脱模是靠装置上方安装在齿轮齿条机构上的两个液压缸实现的[1-4],伸出的液压杆直接将浇筑好的模块顶出。
技术参数见表1。
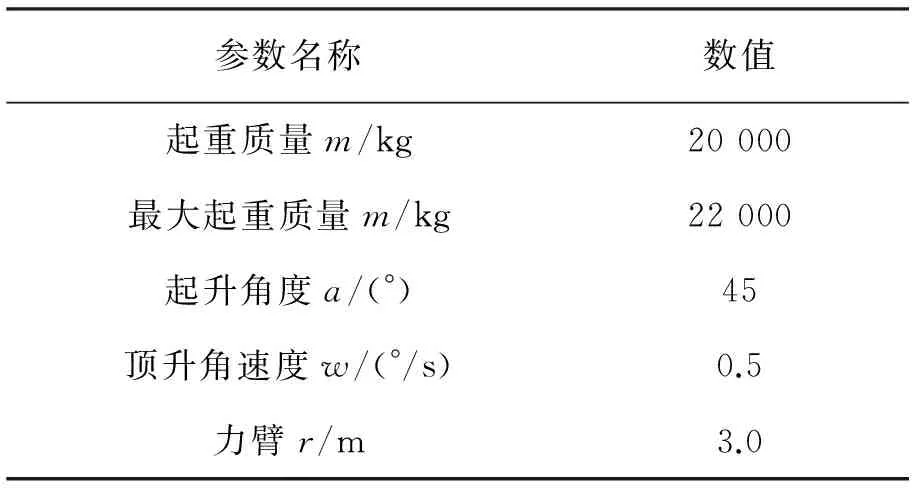
表1 技术参数
在以上技术参数中,起重量和载荷中心距决定了起升系统的承载能力,起升角速度体现工作装置的工作效率,起升角度和起升高度则体现了与后续生产步骤的连续性[5]
为实现功能,起升机构和顶升机构布局如图1所示。
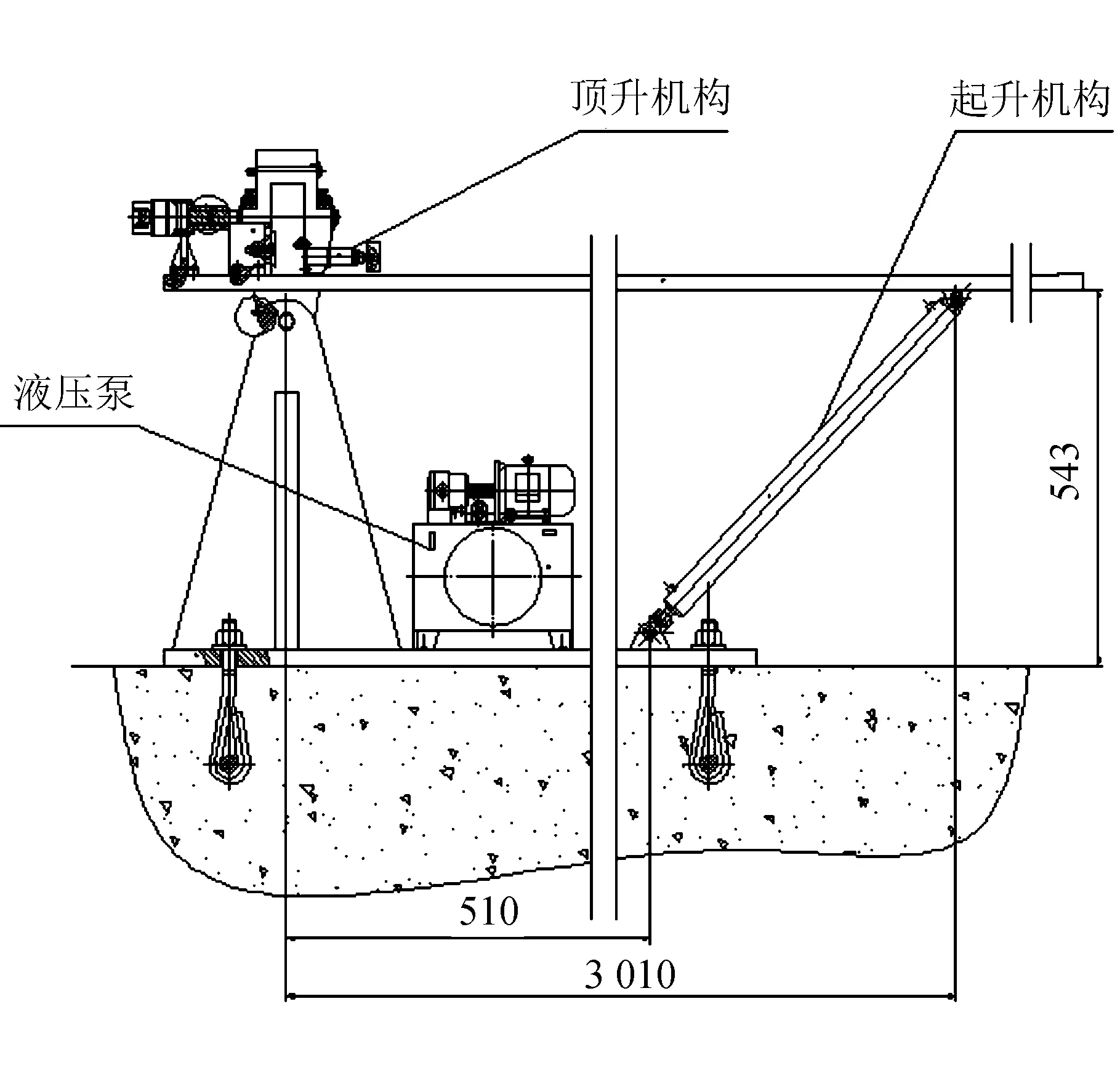
图1 起模系统机械设计图
整个机构的模型建立如图2所示。
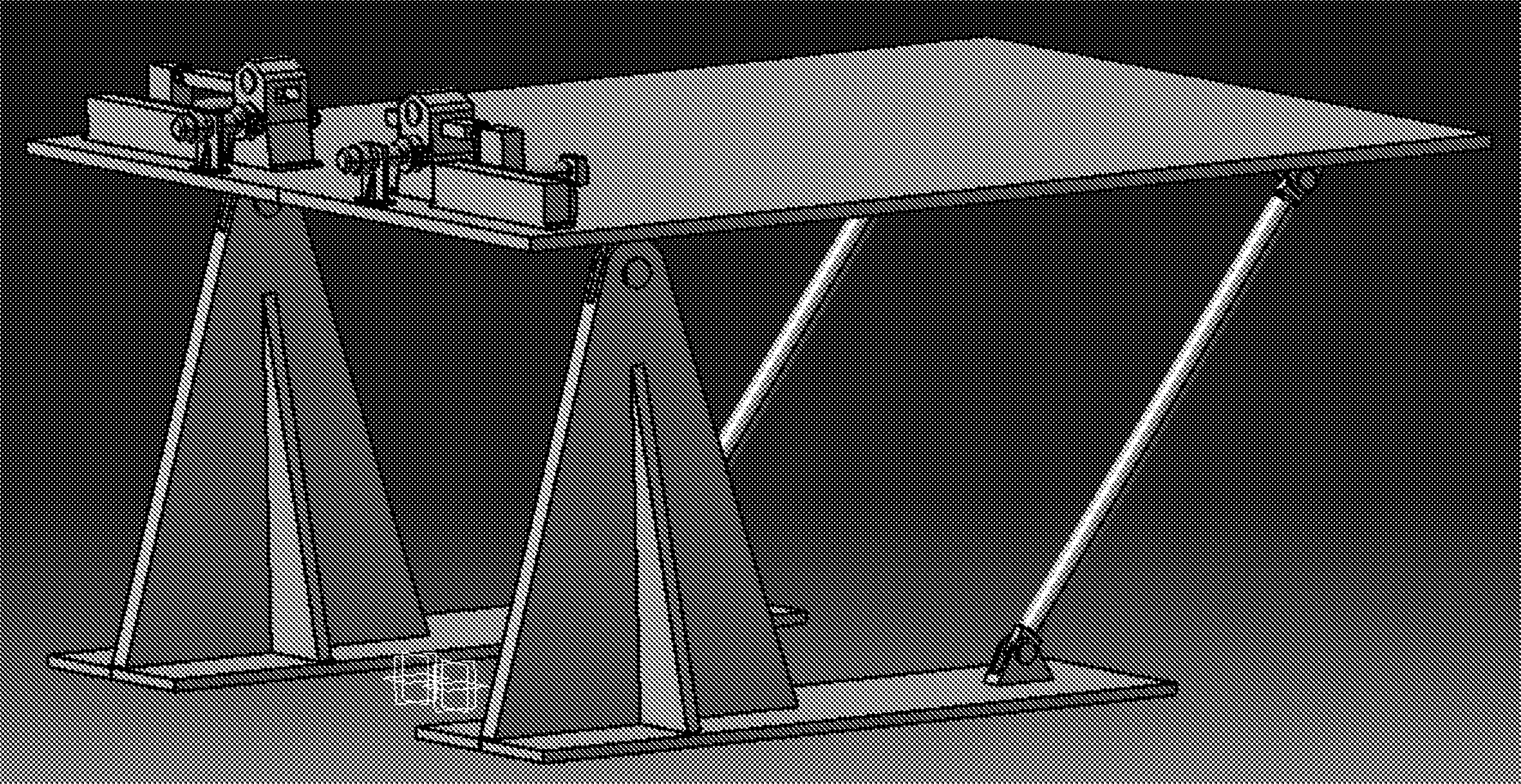
图2 起升机构整体模型
1.2 可调式顶模机构的设计
模块化建筑在生产过程中,要生产尺寸大小不同的模板墙体,以满足不同的房型、不同部位的需求,具体反映到起模翻转系统的要求就是需要起模系统能对不同尺寸大小的模板墙体进行顶升,顶模液压缸的直线方向移动可以用液压缸实现[6]。
由于尺寸调节的运动形式为直线形式,因此考虑使用齿轮齿条结构,传动结构简单[7]。将所建模型导入到RecurDyn中进行齿轮齿条机构的动力学仿真,如图3和图4所示。
图3 可调式顶模机构位置调节前
图4 可调式顶模机构位置调节后
从图3和图4的对比可以直观地看到通过齿轮齿条机构进行的距离调节,这样可以使设备用来适应不同建筑模块的大小。
2 强度及稳定性校核
2.1 结构强度有限元分析
ansys分析如图5所示。
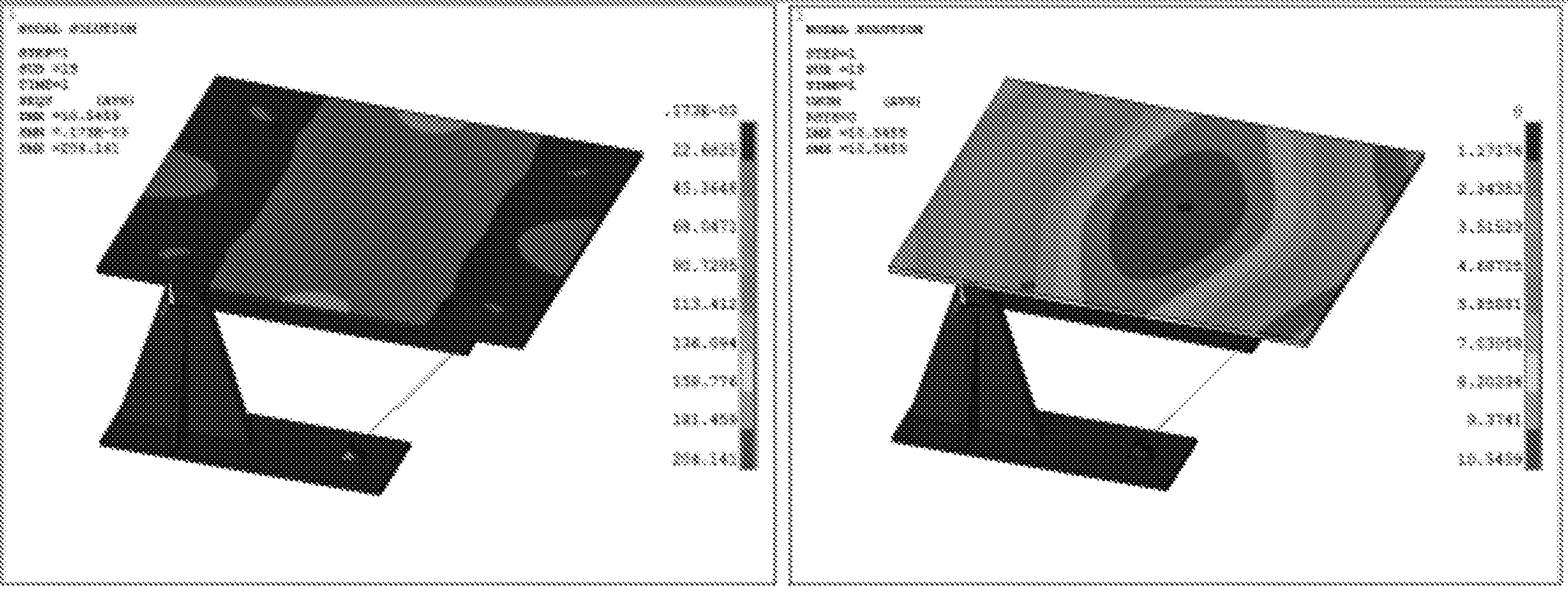
图5 ansys分析
通过ansys计算结果(见图5),结构在承受载荷22 000 kg的情况下,最大应力处均位于载荷作用区域,满足刚度要求。整体结构满足强度要求,且不存在局部屈曲不稳定现象[8]。
2.2 稳定性校核
根据液压缸设计标准,当液压缸长径比超过10∶1时就需要校核活塞杆的稳定性,因此可在设计过程中适当取值,最后进行弯矩挠度的稳定性校核。
经液压系统设计中的计算得到压缸内径尺寸系列选取D=90 mm,活塞杆直径为d=50 mm。活塞杆的稳定性验算可通过等截面积计算法,假设液压缸承受的为无偏心载荷[9],如图6所示。
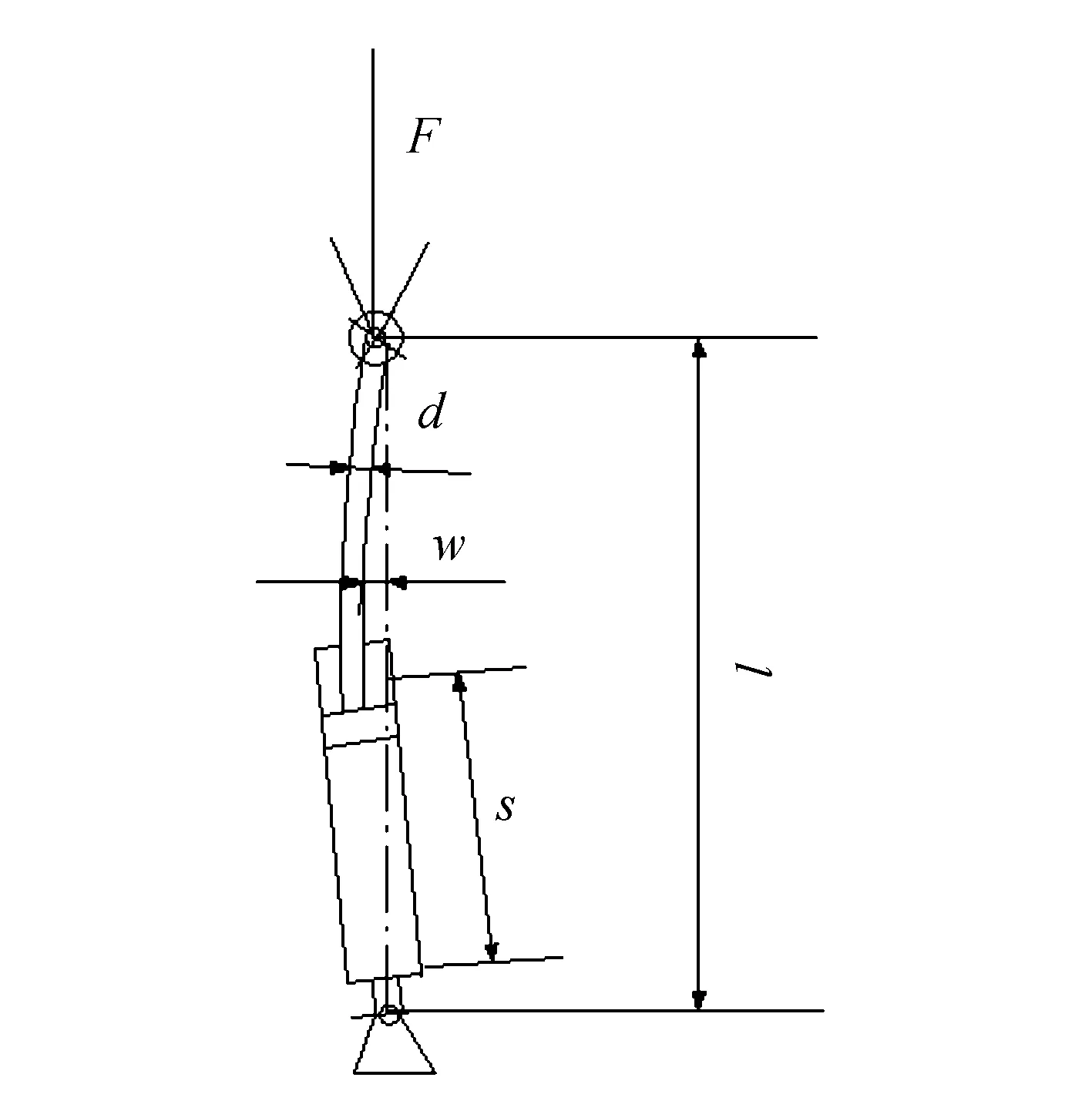
图6 弯曲挠度示意图
(1)
安装高度取工作的极限位置,即钢架结构与水平面成45°的位置,由计算可知l=3m,液压缸活塞杆为实心结构,因此取k=d/4=0.125m,查取相关资料可知,一般钢结构m=85,根据两端铰接的情况知n=1,因此得出
根据式(1)计算临界载荷:
102 000N=102kN
由此可见,Pk>F1,因此经校核选用的液压缸能够满足要求。
3 结 语
设计了一套在模块化建筑中对浇注成型、烘干后的墙体模块能进行翻转、脱模,方便后续吊车对建筑模块的运输。通过液压系统实现起升和顶升的动作,以此来完成对建筑模块的翻转和脱模的操作。通过计算对结构中的关键部件进行尺寸的选择,并对其强度和稳定性进行校核。得到的计算结果显示,所设计的机构结构合理,稳定性达到正常标准。
[1] 张丹丹.关于起重机模块化优化的设计方案探索[J].河南科技,2013(16):82-82.
[2] 李海蓉.一种用于模块化建筑的墙体成型装置:中国,CN203438355U[P].2014.
[3] 郭研,王海兰,陶新良.工程机械液压系统可靠性设计分析[J].起重运输机械,2006(4):49-51.
[4] 施巍.基于工控机的电液振动台伺服控制系统[D].长春:长春工业大学,2012.
[5] Teng Y Y,Dong D S,Qiu H Q. Comparative analysis on the allowable stress and limit state methods of crane structure design standards at home and abroad [J]. Advanced Materials Research,2012,471:559-564.
[6] 王世玉,薛军.矿冶设备液压传动起重、升降机构分析[J].黄金,2005,26(9):35-38.
[7] Peng W,Qian Z L,Zhong K M. Hand device based on two-step force orthogonal amplification mechanism of linkage and pinion and rack mechanism [J]. Development & Innovation of Machinery & Electrical Products,2007,28(4):121-127.
[8] Taneda M,Koibuchi K,Matsukawa Y. Study of crane structure design considering fatigue under service load [J]. Bulletin of Jsme,1971,14:534-540.
[9] 李鹏.起重机液压起升机构可靠性分析及安全评价[D].太原:太原科技大学,2013.
A construction lifting modular system
WU Dongdong1,2,FAN Jiuchen2*
(1.College of Automation,Qingdao University of Science and Technology,Qingdao 266042,China;2.College of Mechanical Engineering,Beihua University,Jilin 132021,China)
A hydraulic construction lifting modular system is designed which includes lifting/topping set and a size-adjustment device. The hydraulic cylinder and hydraulic motor are used in the driving system. With ANSYS software,both the strength of the lifting mechanism and leverage stability are analyzed. We also simulate the dynamic process of the size adjustment with RecurDyn software.
modular construction; lifting mechanism; hydraulic system.
2016-07-25
教育部青年基金资助项目(20130061120038)
吴东东(1990-),男,汉族,吉林榆树人,青岛科技大学硕士研究生,主要从事控制工程设备及系统的设计与开发方向研究,E-mail:15948649385@163.com. *通讯作者:范久臣(1973-),男,汉族,吉林吉林人,北华大学教授,博士,主要从事工业通用技术与设备的研究开发,E-mail:fanjiuchen1973@163.com.
10.15923/j.cnki.cn22-1382/t.2016.5.20
TH 21
A
1674-1374(2016)05-0512-04