基于A3938三相无刷直流电机驱动板的研究与设计
2016-12-13郭昕刚
郭昕刚,李 航
(长春工业大学 计算机科学与工程学院,吉林 长春 130012)
基于A3938三相无刷直流电机驱动板的研究与设计
郭昕刚,李 航
(长春工业大学 计算机科学与工程学院,吉林 长春 130012)
三相无刷直流电机是同步电机的一种,使用A3938电机控制芯片对其进行模式设置,使A3938运行在PWM模式,通过所产生的PWM信号对六组N-MOS管组成的全桥电路进行驱动,控制MOSFET的通断,从而控制无刷直流电机的转动。以A3938为核心的控制电路、以MOS管为主要元件的全桥驱动电路及相应的电源电路的结合实现了对三相无刷直流电机的驱动。
无刷直流电机; A3938; 全桥驱动电路
0 引 言
当今社会的高速发展对电子产业及机械自动化产业有着较强的依赖性,电机在工业领域有着不可动摇的地位。电机的使用已经遍及人们生活的各个领域,随着晶体管器件和半导体器件的发展,电机衍生出了无刷直流电机这一类别,无刷直流电机不需要机械换向刷,而是以电子换向器取代机械电刷,有着其独有的特性[1]。
无刷直流电机是同步电机的一种类型,无刷直流电机由定子、转子和霍尔传感器等结构组合而成,其定子产生的磁场和转子产生的磁场频率相同,解决了一般感应电机的频差问题[2]。无刷直流电机又分为单相无刷直流电机、双相无刷直流电机和三相无刷直流电机,其中以三相无刷直流电机应用较为广泛。
三相无刷直流电机主要通过定子与转子之间磁场的相互作用使电机产生转动,再通过霍尔传感器检测转子的位置,调节电机的转速与转向,可通过PWM信号的输入实现对无刷直流电机的控制。
1 系统总体设计
本设计通过设置三相无刷直流电机的控制芯片A3938为PWM模式,产生相应的PWM信号,然后控制MOS管驱动电路,即N-MOS全桥驱动电路上下臂,实现电机的转动和方向的变化。整体的系统运行结构如图1所示。
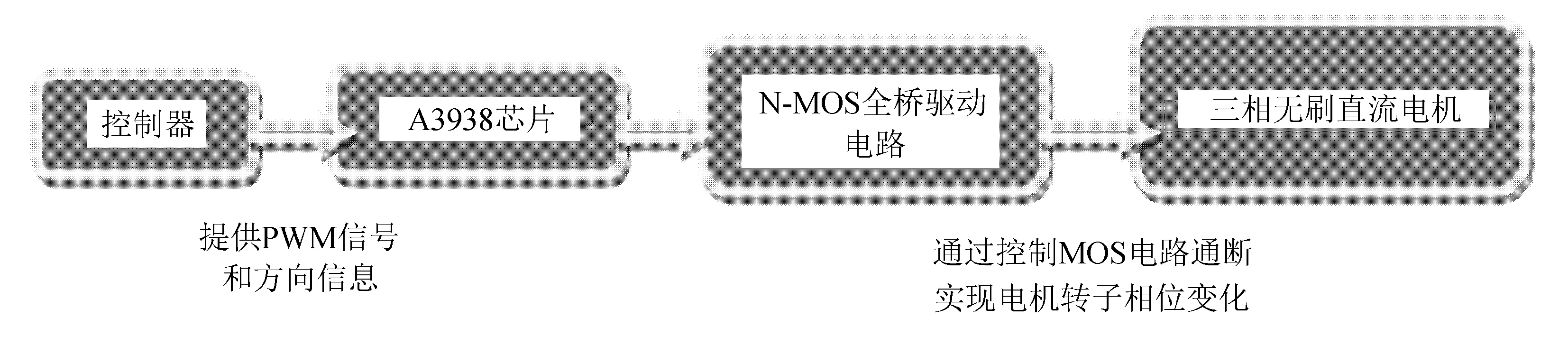
图1 三相无刷直流电机驱动系统总体设计框图
本设计所驱动的电机是带霍尔传感器的三相无刷直流电机,通过控制驱动电路的MOS管通断来控制相应转子磁体,使电机发生转动,并结合霍尔传感器检测转子位置以精确控制电机转动[3]。电机的霍尔控制如图2所示。
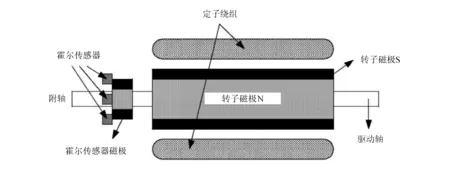
图2 霍尔传感器测量原理
2 系统硬件设计
2.1 电源模块设计
电源模块作为整个驱动板的供电模块,需要其拥有稳定的供电性能和优越的可靠性,在本设计中,电源电路主要通过开关电压调节器LM2596来进行稳压,使输出电压固定在5 V。用LM2596来控制电源电路主要因为其有着众多优点,有很多其他器件无法比拟的优越性[4]。首先,LM2596可以输出3.3、5、12 V的固定电压,这是设计中考虑到的,设计中采用12 V转5 V的固定电压对驱动板供电;LM2596的输出还具有良好的线性,负载可以进行调节,并且内部的振荡频率较高,可达150 kHz,功耗较以前的开关电压调节器更小而且效率更高;LM2596还具有过热保护功能和限流保护功能,当该器件的温度或电流达到一定峰值,会自动断开以达到保护电路的功能;LM2596的外围电路也十分简单,也是设计中选择它来控制电源的主要原因之一,只用到了几个外围原件,可以轻松实现电源电路的功能。
本设计的电源模块原理如图3所示。
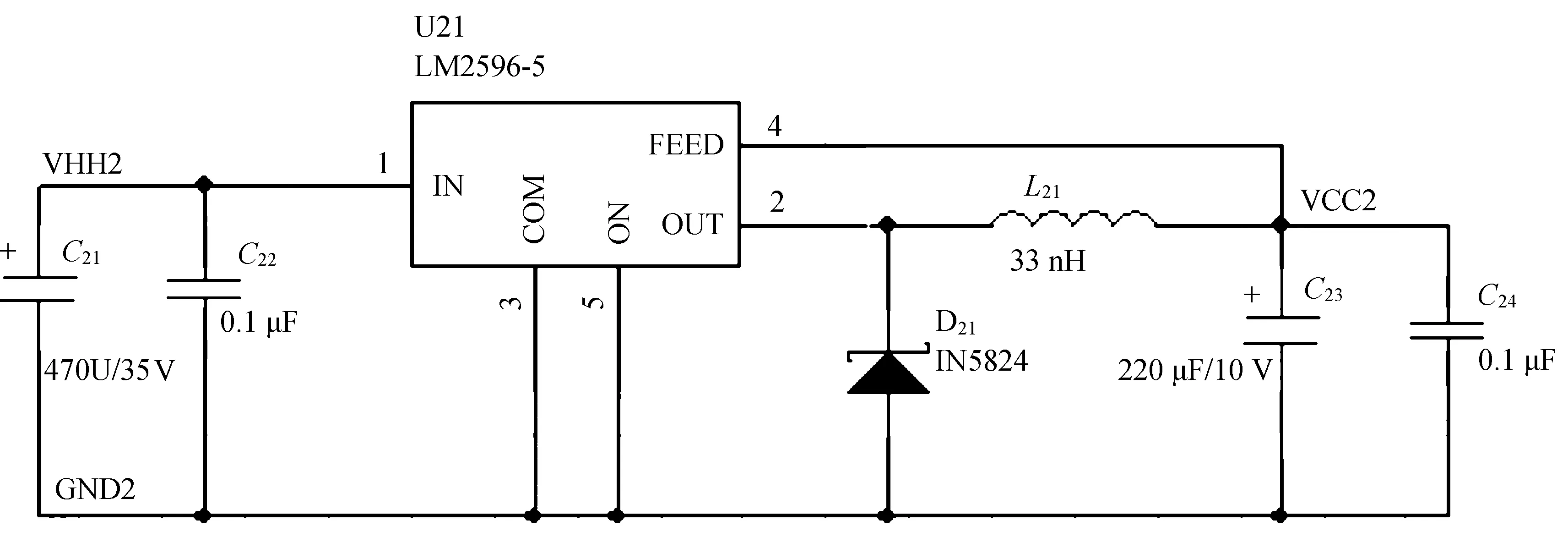
图3 电源模块原理图
外围电路较为简单,只需要选择适合参数的元器件就可以控制输出的固定电压值。引脚1为电压输入引脚,通过LM2596稳压从引脚2输出5 V电压。该电源电路中的二极管的反向耐压值需要达到最大输入电压的1.25倍,另外,此二极管还需要有快速恢复的功能。所需要的二极管还需要有开关速度迅速和正向压降较低的特性,所以选择肖特基二极管IN5824作为电源电路中的吸纳二极管。图3中C22、C24电容用来通交流隔直流,C21、C23为滤波电容,用来滤除相应的噪声。
2.2 控制模块设计
A3938控制模块如图4所示。
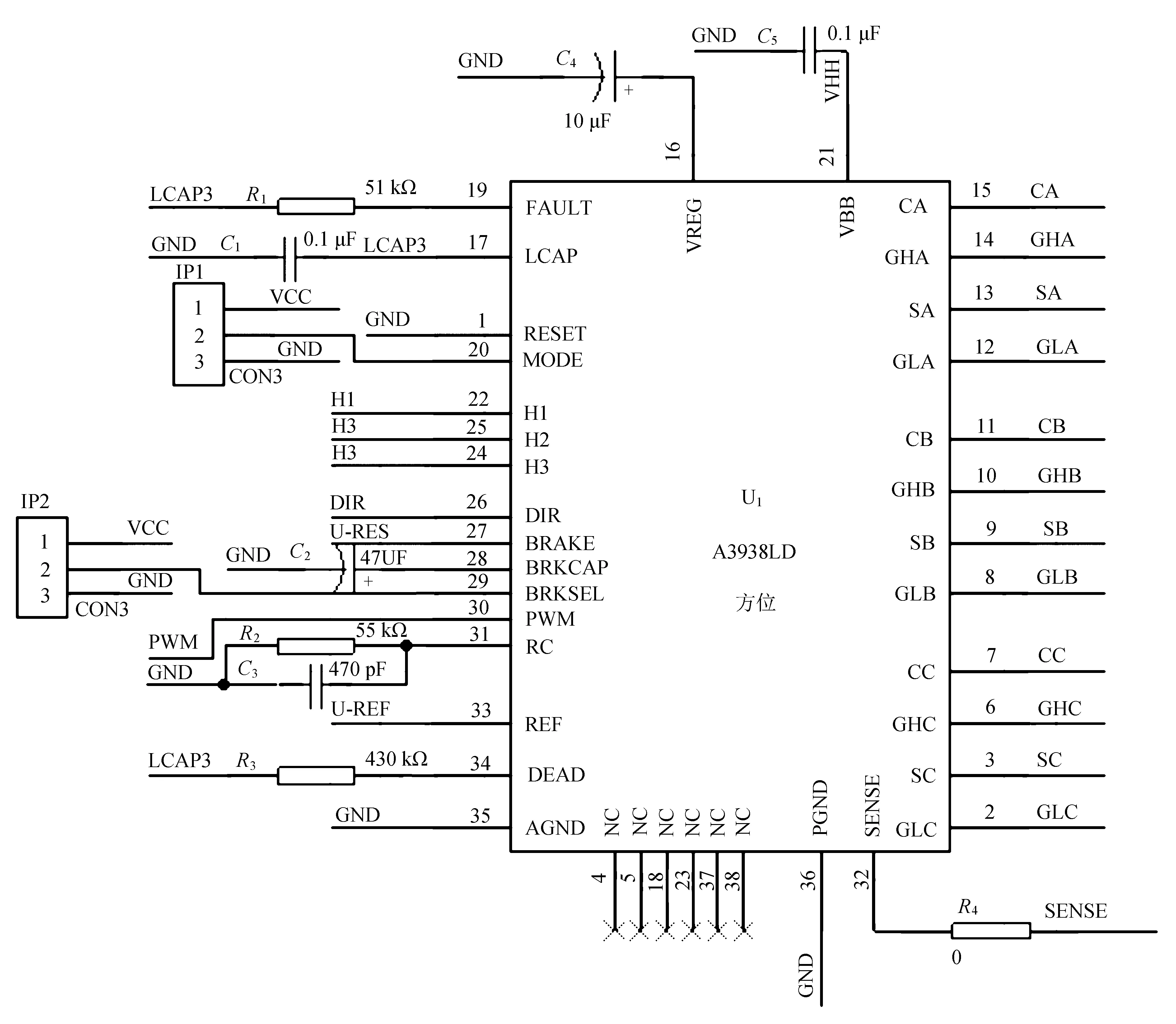
图4 A3938控制模块原理图
控制模块是本项目设计的核心模块,主要通过设置A3938控制芯片为PWM模式来对整个硬件系统进行控制。A3938是一个三相功率MOS控制器,主要对无刷直流电机进行控制,可以用于使用脉冲宽度调制电流来进行控制的三相无刷直流电机的驱动。A3938工作的最高电压为50 V。经过A3938的控制输出三组MOSFET驱动信号。A3938还对电源模块提供的5 V电压进行升压处理,输出15 V的电压为后续的MOSFET驱动电路提供驱动条件。A3938还可以连接霍尔传感器,利用霍尔传感器来检测直流电机的转动位置[5-6],通过PWM信号的输出,调节PWM的占空比改变电机的转速,通过DIR引脚可以改变电机的转动方向(见图4)。结合霍尔传感器的控制就能使电机稳定转动。A3938输出的电压范围是12~50 V,其内部提供的5 V逻辑电压能控制MOSFET的保护和掉电功能。A3938的内部电路保护功能可防止滞后过热带来的损坏和电流交叉产生的影响[7]。
图4中REF引脚接的是参考电压,用于内部电流保护,当驱动电流经过电路时与预设的电压值进行比较,超过预设电压会自动断开。H1、H2、H3引脚用于连接霍尔传感器,控制与检测电机转子的位置。MODE引脚用于选择工作模式,MODE=1,BRKSEL=0,即JP2的2引脚和3引脚短接,JP1跳线不连。RESET引脚为使能引脚,用于对芯片进行使能。设置为1时,电机惯性转动或者减速转动,设置为0时,则允许G端控制,在本设计中通过MOS管驱动电路的栅极驱动,所以设置为0。SENSE引脚外接一个转换电阻,当MOSFET驱动电路的上下臂MOS同时导通时,传感器会感应到大电流,可以防止MOS的短接,起到保护电路的作用。GHA、GHB、GHC引脚连接的是MOS管驱动电路的G端驱动高电平,即这3个引脚连接全桥驱动电路的上臂MOS管的栅极。而GLA、GLB、GLC引脚连接的是MOS管驱动电路的G端低电平,即这3个引脚连接全桥驱动电路下臂MOS管的栅极。SA、SB、SC引脚用于连接电机端子,SA连接motor A、SB连接motor B、SC连接motor C,用于控制电机的3个端子,产生所需要的转动次序。
2.3 驱动模块设计
驱动模块主要通过三组MOS管来实现MOS控制电路,即全桥驱动电路,如图5所示。
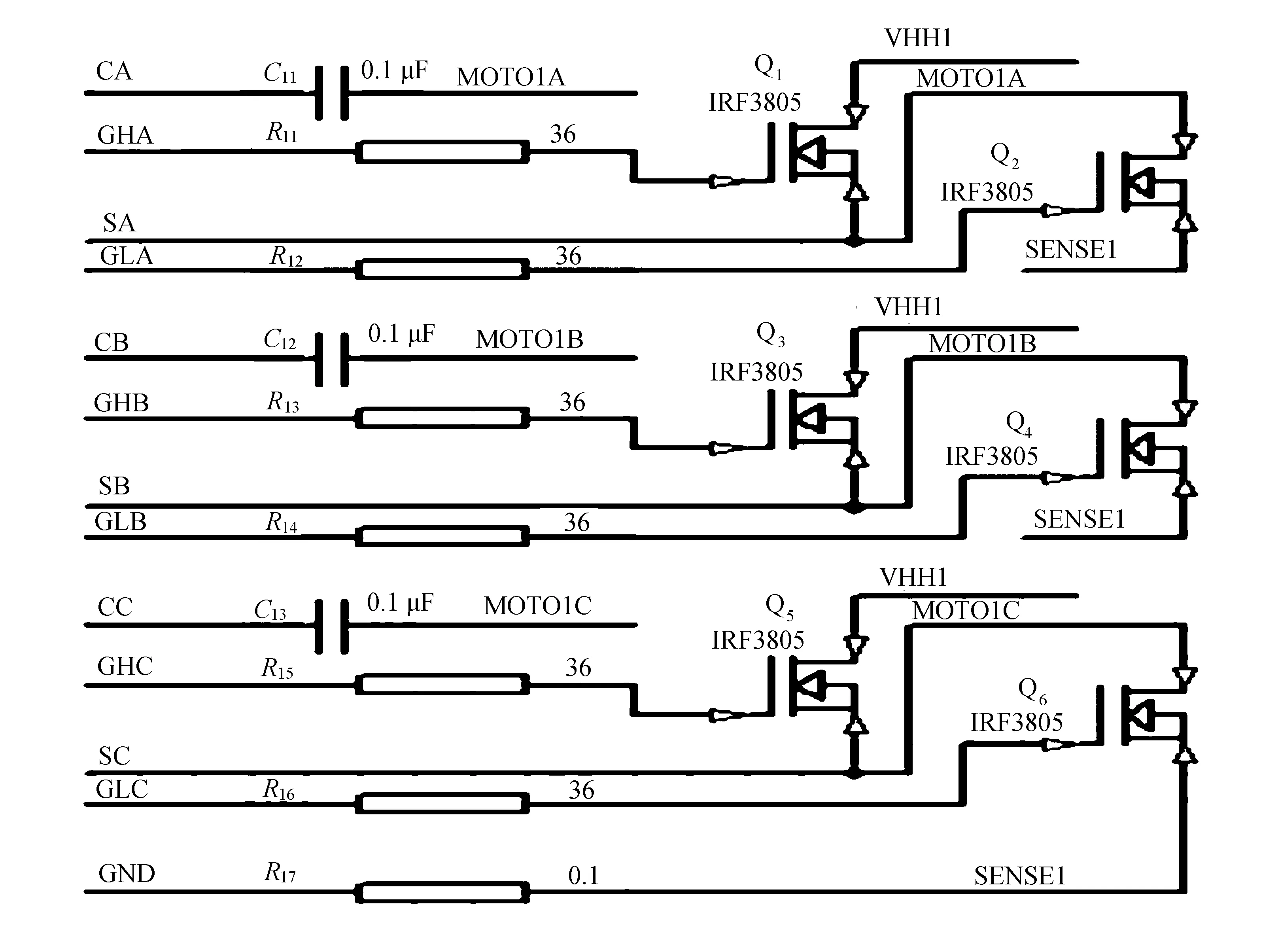
图5 全桥驱动电路原理图
一个三相全桥电路的安排是用于电机控制器和电机之间的功率接口,相比于半桥电路,选择全桥电路是因为它拥有更高的扭矩输出能力[8],选择电桥电路的目的是按电机真值表的要求使电机的3个端子接通电流。

2.4 实物演示
实物图如图6所示。
图6 实物图
3 结 语
实现基于A3938的三相无刷直流电机驱动板设计,A3938电机驱动芯片对整个系统进行控制,利用全桥电路对直流电机进行驱动,其优点在于使用驱动芯片A3938来控制电路,易于集成控制,大大降低了普通驱动电路的控制难度,在一个集成度更高的器件上实现控制功能。同时,高集成度也提高了控制的效率,更加适合生产工作时对效率的要求。
[1] 夏长亮.无刷直流电机控制系统[M].北京:科学出版社,2009.
[2] 张琛.直流无刷电动机原理及应用[M].北京:机械工业出版社,2004.
[3] Sun Jun Park. A new approachfor minimum-torque-ripple maximum-efficiency control of BLDC motor [J]. IEEE Trans. Ind. Elect.,2000,47(1):109-114.
[4] Daniel Torres. Sensorless control of a brushless DC motor [J]. Control Engineering,2010,57(4):54-57.
[5] 杨影,阮毅,陶生桂,等.一种新型无刷直流电机转子位置检测方法[J].电机与控制学报.2010,14(2):60-64.
[6] 孙雅雯.一种新型无刷直流电机驱动板的设计[J].科技风,2013,24:27-28.
[7] 安志勇,杨帆,曹秒,等.一种基于STC单片机和绝对式编码器的步进电机控制方法[J].长春工业大学学报:自然科学版,2013,34(1):64-67.
[8] 李伟东,唐万军,庞佑兵.一种低功耗的三项无刷电机驱动控制器设计[J].微电子学,2010,40(2):252-255.
Research and design of three-phase brushless dc motor drive board based on A3938
GUO Xingang,LI Hang
(School of Computer Science and Engineering,Changchun University of Technology,Changchun 130012,China)
Three-phase brushless dc motor is a kind of synchronous motor,using the motor control chip A3938 and set the pattern ,making the A3938 at PWM mood. With the three pair of PWM signals,it can drive the full-bridge circuit which is made of N-MOS. More than that,the circuit control MOSFET on and off,this leads to the running of motor. A3938 is the core of the circuit and combine with the full-bridge circuit and the power supply circuit,the drive of three-phase brushless dc motor is realized.
brushless dc motor; A3938; full-bridge drive circuit.
2016-04-23
吉林省教育厅基金资助项目(2014137)
郭昕刚(1979-),男,汉族,吉林长春人,长春工业大学副教授,硕士,主要从事嵌入式系统设计方向研究,E-mail:6889068@qq.com.
10.15923/j.cnki.cn22-1382/t.2016.5.12
TP 331.2
A
1674-1374(2016)05-0474-05