带色彩地面激光雷达点云数据的匀光匀色方法
2016-12-08程效军程小龙
郭 王, 程效军, 程小龙, 李 泉
(同济大学 测绘与地理信息学院,上海 200092)
带色彩地面激光雷达点云数据的匀光匀色方法
郭 王, 程效军, 程小龙, 李 泉
(同济大学 测绘与地理信息学院,上海 200092)
目前许多地面激光雷达(light detection and ranging, LiDAR)能够获取带有目标色彩信息的点云数据,利用这些数据,可以实现点云模型的精细纹理快速、自动化的生成.但因异站点云数据存在颜色差异,生成的纹理可视化效果并不理想.针对这一问题,根据色彩分量表达与空间坐标的相似性,提出了一种基于色彩坐标转换的点云匀光匀色方法.实验结果表明,异站点云颜色差异得到了较好的修正,生成的纹理效果佳.该方法不仅可用于地面LiDAR数据,对于其他来源的具有颜色信息的地面LiDAR点云数据也可据此进行带色彩点云数据的匀光匀色并生成精细纹理.
匀光匀色; 颜色差异点云; 精细纹理生成; 三维建模
地面激光雷达(light detection and ranging,LiDAR)快速精确的特点在三维重建中有着广泛应用.而三维重建中,模型的纹理是影响模型逼真程度的重要因素.在考古等行业中,对模型的纹理精细程度有着很高要求.目前采用LiDAR数据进行三维建模中,纹理多是通过对目标拍摄获取影像,再将影像纠正并进行裁剪等处理,最后配准到三维素模中.这种方法虽然简单易行,但对于外表结构较为复杂且模型精度要求较高的地物,后期纹理处理的成本高,纹理贴图的精度和效果也不理想.
目前很多地面LiDAR设备自带相机,在获取点云数据的同时,也获取了点云对应的色彩.而利用点云色彩拟合生成彩色格网的算法也逐渐成熟,从而为附有颜色属性的点云建模提供了必要的数据和算法支持.
地面LiDAR设站时重点考虑完全覆盖扫描对象,所以一般对目标地物需要进行多角度和多测站扫描.这虽保证了目标地物的完整性,但这种设站方式很少考虑到光照因素对扫描效果的影响.拍摄效果容易受到光照、周围物体阴影遮挡等影响,造成同一目标不同测站点云颜色的强度和饱和度等不一致.异站点云数据色彩差异较大,在生成纹理时,相邻测站点云交汇处纹理色彩不协调,影响彩色模型的整体效果.所以需要在纹理生成阶段对异站点云色彩进行匀光匀色处理,使其颜色协调一致.目前常用的Mask,Wallis等匀光匀色方法大多是针对航摄影像,且对象为二维图像.而LiDAR扫描成果为三维点云,传统匀光匀色方法并没有很好的适用性.本文提出一种自动化的彩色点云处理技术,通过对彩色点云匀光匀色,生成附有精细纹理的模型,省去传统建模的中后期纹理匹配环节,既节省了人工成本,丰富了模型细节,又提高了建模效率与模型的逼真程度.
1 LiDAR点云匀光匀色方法
1.1 传统匀光匀色方法
目前二维影像的匀光匀色方法相对成熟,自动化程度也相当高.如Mask匀光法,可以得到较好的匀光效果,但会导致局部模糊或色彩失真,适用于单幅影像的匀光[1-2];Wallis匀光法可以使影像中灰暗区域的亮度和对比度得到增强,适用于多幅影像的匀光[3-4];Retinex匀光法可以很好地保持影像色彩的真实性,适用于单幅影像的匀光,但是对反差分布不均的图像难以校正[5-6].将相邻测站的点云数据转换为二维影像,采用传统的匀光匀色方法,可得到如图1的效果.

a 原始数据
b Wallis方法的效果
c Mask方法的效果
由图1可以看出,当在两幅影像强度和饱和度相差过大的情况下,可视化效果并不理想.其主要原因有以下两点:① 传统影像中,尤其是航摄影像中,地面很少出现大面积空白(或白色),而大面积的空白会对传统的匀光匀色方法结果产生很大影响,如图1b,采用Wallis方法,由于周围的白色背景,导致目标本身的亮度被大幅提高;② 站与站之间颜色存在某一分量上远大于其他两个分量的情况,导致传统方法在匀光匀色时,很难对其中差异较大的分量进行有效的修正,如图1c,采用Mask方法,可以对颜色强度进行很好的修正,但是在R(红),G(绿),B(蓝)颜色分量上的修正并不理想.
1.2 色彩变换模型的改进
从根本上讲,匀光匀色就是对色彩进行变换.HSI(hue, saturation, intensity)模型和RGB(red, green, blue)模型都是对色彩的量化描述.考虑到目前大部分显示都采用RGB模型,且HSI模型和RGB模型可相互转换,所以本文采用RGB模型进行计算.
von Kries提出采用对角模型作为人眼适应性模型,被称为von Kries系数法,表达式为
(1)
式中:L,M,S分别表示补偿前3种视锥细胞的响应值,也就是对红、绿、蓝3个通道敏感的视锥细胞的响应信号;L′,M′,S′分别表示补偿后的色度刺激值,也是预期的校正后的3个通道的响应信号;kL,kM,kS是3个线性系数.该理论虽然只能部分补偿照明光属性变化[7-8],并不能完全解释颜色恒常性的机制[9],但由于三色理论的依据是视网膜中存在的3种视锥细胞分别对红、绿、蓝波段的光谱能量分布,因此,式(1)可近似表达为
(2)
式中:R,G,B分别为原始的R,G,B值,而R′,G′,B′分别为修正后的R,G,B值,而kR,kG,kB是3个线性修正系数.
根据RGB模型的显示原理,R,G,B作为3个叠加分量,存在高相关性[10].目标本身R,G,B值除会受到光源强度、角度差异等因素影响,还会在显示上相互影响,因此应在颜色修正时考虑加入其他两分量的影响,则式(2)变为
(3)
式中:m,n分别为其他两个颜色分量的影响系数.式(3)表示R,G,B3个分量受到光源强度、角度等影响后反映在人眼中的显示效果.
1.3 LiDAR点云的匀光匀色
LiDAR所产生的彩色点云数据与二维影像有以下两点主要区别:
(1) LiDAR数据采集时光照情况更为复杂.针对某一特定地物采集时,地面LiDAR需要对目标进行环绕多站扫描,不可避免地存在测站顺光和逆光的情况.另外地面环境较为复杂,周围的一些建筑或其他反光物体可能成为新的光源,这些都给后期匀光处理增加了难度.而一般航摄影像的光源方向虽有偏差,但总体都是顺光及单光源.
(2) 数据结构不同.三维点云数据相对于二维图像,邻近关系计算更加复杂.由于传统二维匀光匀色方法多考虑邻近像素的影响,所以三维点云邻近关系选择和计算效率也是需要考虑的问题.
另外,在人工干预的层面上,二维影像可以直接利用软件对其进行手工调整和微调,而三维点云很难用一种直接、直观的方式对其进行调整,这也加大了点云匀光匀色的难度.

(4)
式中:R,G,B为目标的原有R,G,B值;R′,G′,B′和R″,G″,B″分别为不同测站的R,G,B观测值.其匀光匀色的方法就类似于求坐标系间转换关系:在不同测站获取同名点,根据同名点求得不同测站间的R,G,B转换参数,通过计算将不同测站点云统一到一个RGB坐标空间中,即可得到相同或相近颜色的异站点云.
在RGB模型中,在常用的256个灰度级数字影像的动态范围内,一些真实颜色的细微变化都被近似表达,而其中一些非线性的变换也可被线性变换近似表达.在日常阳光(白光)的条件下,R,G,B分量的影响较为均匀,其影响可以近似看作在一个RGB空间坐标系通过旋转、拉伸等线性变换,转换为另外一个RGB空间坐标系,其直观表现就是相同场景的不同角度的颜色差异.式(4)可变换为
(5)
式中:ωR,ωG,ωB为两RGB坐标系间的旋转系数;k1,k2,k3为拉伸系数.由于拉伸系数仅分别与R,G,B3个分量相关,且3个分量间拉伸系数数值相差较小,可通过添加平移系数ΔR,ΔG,ΔB,将k1,k2,k3统一为k.式(5)可变换为
(6)
在R,G,B分量的颜色表现上,ΔR,ΔG,ΔB更类似一种强度补偿.在实验中,两组色彩强度相差较小的数据,其ΔR,ΔG,ΔB的值也更小,而色彩强度相差较大的数据,其ΔR,ΔG,ΔB的值则会更大,而k则主要体现R,G,B分量整体的拉伸程度.
将不同测站同名点的R,G,B值带入式(6),可求得不同测站间的转换参数,并根据转换参数求得颜色改正后的彩色点云.
该方法的优势在于:① 可直接用于点云数据,避免了从点云到影像再到点云的过程,加快了运算效率;② 匀光匀色只专注于目标物体本身,可大幅减小其他背景的颜色、强度等对匀光匀色效果的影响.
1)投用了装置1.0 MPa蒸汽专线,在4月12日停工第二天,配合动力厂投用进装置蒸汽专线,确保装置吹扫蒸汽供应充足。
2 精细纹理的快速生成
地面LiDAR点云数据首先经过去噪、分割和配准等预处理,提取独立完整的目标点云数据.在减少点云数量,提高运算效率的同时,可减小其他非目标物体颜色变化对目标物体匀光匀色效果的影响.
预处理后,人工选取颜色、亮度较为适中的测站作为基准站.根据各站的位置关系,通过计算相邻站两点间距离确定同名点,并提取相邻测站点云的同名点.再将基准站相邻测站点云同名特征点的R,G,B值代入式(4)进行解算,求出相邻测站的转换参数.转换后的测站作为下一基准站,对未进行色彩纠正的相邻测站重复上述过程,直到所有测站都完成色彩修正.最后对修正的点云进行压缩和封装,可得到具有精细纹理的三维模型.精细纹理生成流程如图2所示.
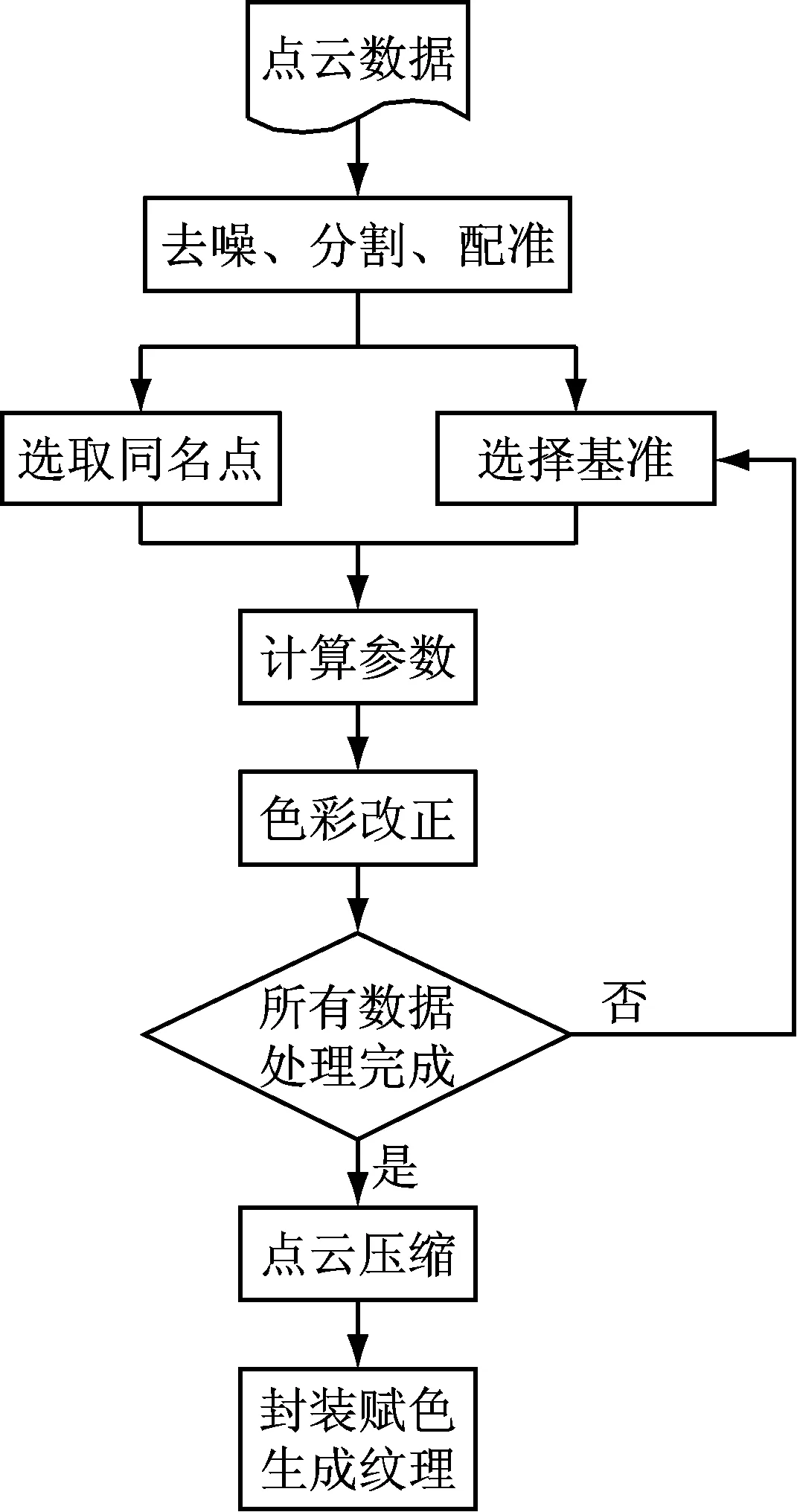
图2 精细纹理生成流程图
3 实验验证
实验选取某古塔1,2层地面LiDAR点云数据,共10个扫描站,其分布如图3所示.
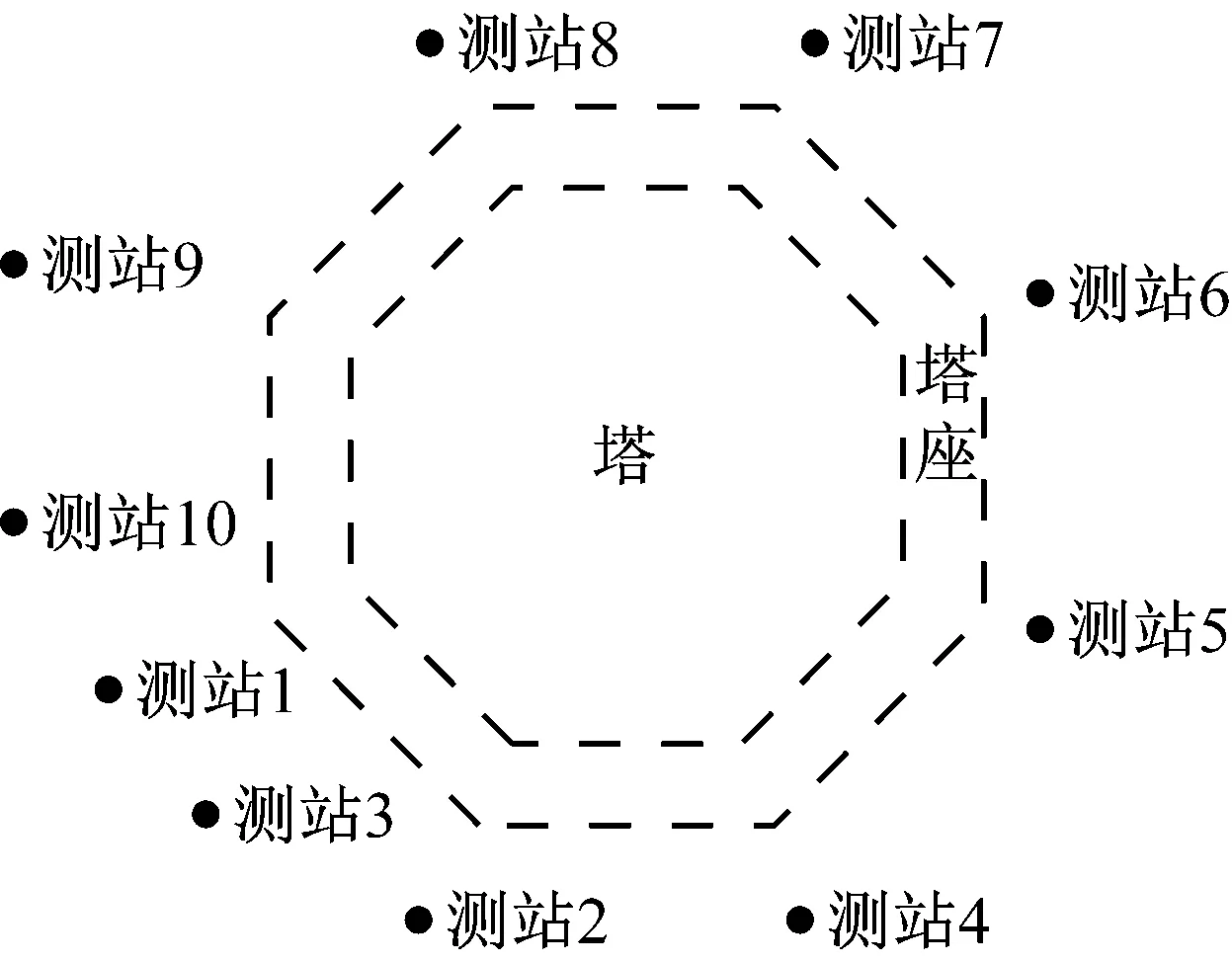
图3 测站分布图
由图3可以看出,10个测站可完全覆盖古塔,并且相邻测站都可保证至少有古塔的一面作为公共部分,便于之后的同名点提取.
因为天气原因,该古塔的1,2层并没有在同一天内完成采集.其中,测站1,2,8,9,10为第一天采集,测站3,4,5,6,7为第二天采集.第一天天气多云,导致有数个测站采集的数据颜色较为灰暗;第二天因为阳光直射较强,多个测站采集的数据颜色过于明亮而偏离古塔原有颜色.实验采用颜色平均强度数值接近128,且强度方差较大的测站1作为基准站.对测站1进行人工验核,其肉眼观察效果强度适中且对比度较好.
3.1 颜色差异较小的点云匀光匀色
测站1和测站3颜色强度较为相近,选取255个同名点,测站1作为基准站,选取其中分布较为均匀的11个同名点进行参数解算,剩余244个作为验证点.改正站(修正后的测站3)各颜色分量和原测站1、测站3各分量作比较,具体是将改正站的验证点各分量与原测站验证点各分量求差值后平均,结果见表1.将RGB模型转换为HSI模型,比较改正站与测站1、测站3的颜色平均强度和平均饱和度结果见表2.
表1 改正站与差异较小的原始站颜色各分量比较
Tab.1 Comparison of color channel component between corrected and original data of less color difference
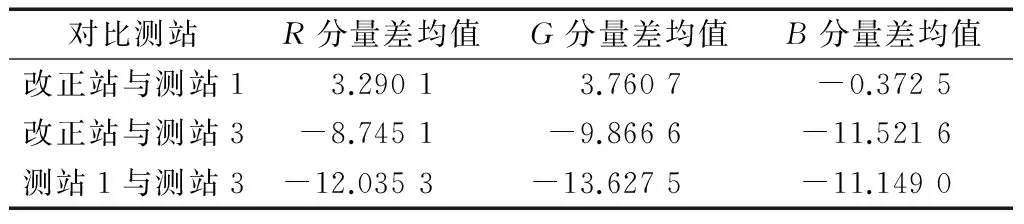
对比测站R分量差均值G分量差均值B分量差均值改正站与测站13.29013.7607-0.3725改正站与测站3-8.7451-9.8666-11.5216测站1与测站3-12.0353-13.6275-11.1490

表2 改正站与差异较小的原始站强度比较
由表1可以看出,在3个颜色分量上都取得了较好的改正效果.而由表2可以看出,在强度和饱和度上,改正后的结果更接近基准站(测站1)的强度和饱和度.测站1与测站3转换前后效果如图4所示.
由图4可以看出,测站1和测站3的颜色差异较小,但亮度存在差异,修正后的测站3颜色和强度更靠近测站1.
3.2 颜色差异较大的点云匀光匀色
测站1和测站2颜色差异较大,因为天气原因在数据采集时,测站2的光照强度较弱,不仅产生强度差异,也产生了色彩偏差.选取测站1和测站2的305个同名点,以测站1为基准站,其中11个作为同名点进行参数解算,剩余294个作为验证点.改正站(修正后的测站2)各颜色分量和原测站1、测站2各分量进行比较,结果见表3.将RGB模型转换为HSI模型,比较改正站与测站1、测站2的平均强度和平均饱和度结果见表4.

a 测站1原数据

b 测站3原数据

c 测站3修正结果
表3 改正站与差异较大的原始站颜色各分量比较
Tab.3 Comparison of color channel component between corrected and original data of more color difference
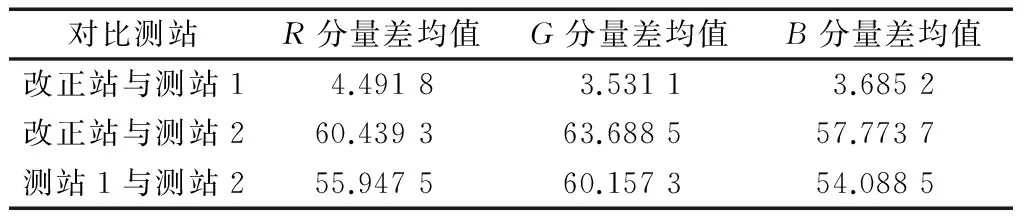
对比测站R分量差均值G分量差均值B分量差均值改正站与测站14.49183.53113.6852改正站与测站260.439363.688557.7737测站1与测站255.947560.157354.0885
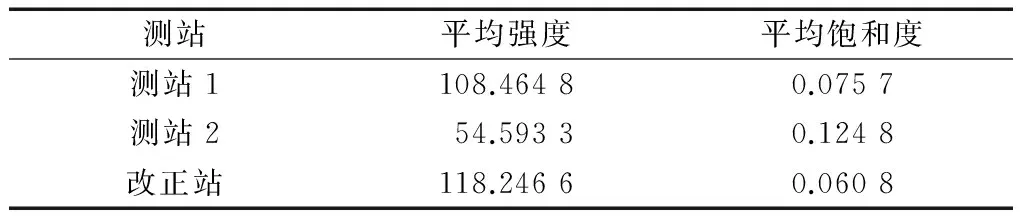
表4 改正站与差异较大的原始站强度比较
由表3可以看出,在颜色差异较大的情况下,该方法能较好地调整各颜色分量,使其更加接近基准站(测站1).而由表4可以看出,通过改正,在强度和饱和度上,改正后的结果更接近基准站(测站1)的强度和饱和度.测站1与测站2转换前后效果如图5所示.

a 测站1原数据

b 测站2原数据

c 测站2修正结果
由图5可以看出,测站1与测站2因为光照原因,其点云色彩差异较大,第一层的墙体颜色差异相对第二层墙体颜色差异更大.经过修正后,颜色差异缩小.
3.3 部分强光反射的点云匀光匀色
由于测站和光源角度不同,会存在部分点云在获取颜色时曝光过度的情况.选取反射较强的测站2和测站4,测站2边缘部分因为阳光反射强烈,使获取的点云颜色严重偏离目标原来颜色,更偏向白色.如将这些点也作为同名点计算转换参数,会影响颜色修正效果,甚至会使整站的颜色完全偏离实际状况,如图6所示.
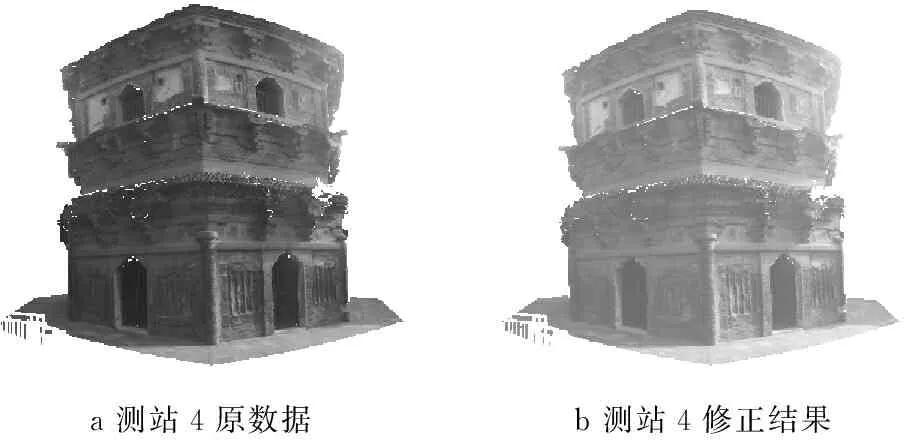
a测站4原数据b测站4修正结果
图6 强光反射的色彩修正对比
Fig.6 Color comparison between corrected and original data of strong light reflection
由图6可以看出,将强光反射导致颜色失真的边缘部分点计入同名点进行转换参数计算会导致修正后测站R,G,B颜色分量值过大,整个点云颜色色调偏红.
将颜色失真的点剔除掉后,选取测站2和测站4的171个同名点,以测站2为基准站,其中11个作为同名点进行参数解算,剩余160个同名点作为验证点.改正站(修正后的测站4)各颜色分量和原测站2、测站4各分量比较,结果见表5.将RGB模型转换为HSI模型,比较改正站与测站2、测站4的平均强度和平均饱和度结果见表6.
表5 改正站与强光反射的原始站颜色各分量比较
Tab.5 Comparison of color channel component between corrected and original data of strong light reflection
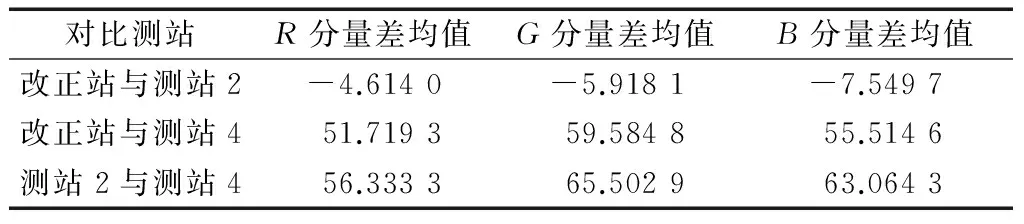
对比测站R分量差均值G分量差均值B分量差均值改正站与测站2-4.6140-5.9181-7.5497改正站与测站451.719359.584855.5146测站2与测站456.333365.502963.0643
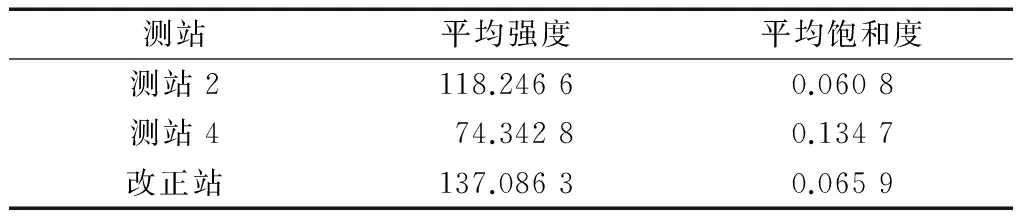
表6 改正站与强光反射的原始站强度比较
由表5可以看出,去除颜色失真点后,颜色修正的偏差不大.但由表6可以看出,测站4改正后在强度上与基准站(测站2)差异较大,这是因为测站4也存在强光反射部分,在色彩修正后,强光反射部分强度再次被增强,导致改正后平均强度增大.改正后具体效果见图7.
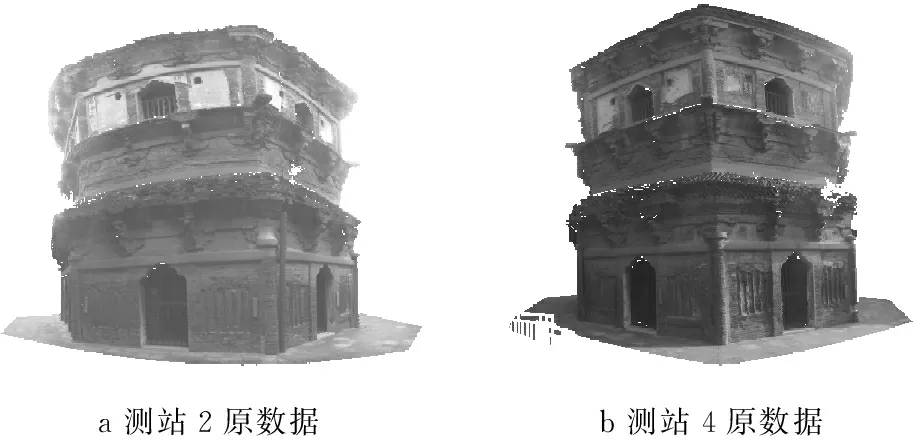
a测站2原数据b测站4原数据

c测站4修正1次结果d测站4修正2次结果
图7 强光反射的色彩二次修正对比
Fig.7 Comparison of color between corrected twice and original data of strong light reflection
为缓解边缘反光对转换效果的影响,需要对修正过后的点云数据进行二次修正,以求更加逼近基准站.在同名点中另外选择11个同名点,与转换后的同名点重新计算转换参数,对改正站进行二次修正后改正站2各颜色分量和原测站2、测站4各分量比较,结果见表7.将RGB模型转换为HSI模型,改正站2与测站2、测站4的平均强度和平均饱和度结果见表8.
表7 二次改正站与强光反射的原始站颜色各分量比较
Tab.7 Comparison of color channel component between correctedtwice and original data of strong light reflection
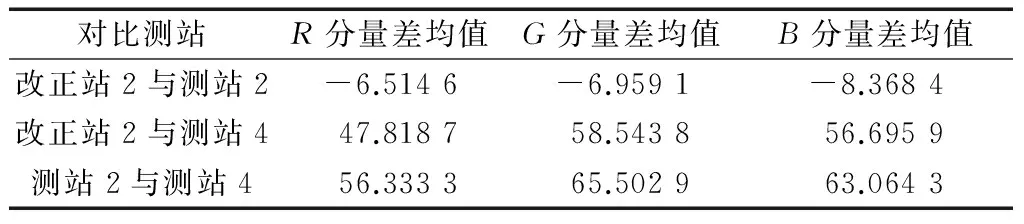
对比测站R分量差均值G分量差均值B分量差均值改正站2与测站2-6.5146-6.9591-8.3684改正站2与测站447.818758.543856.6959测站2与测站456.333365.502963.0643
二次修正的结果跟一次修正相比较,虽然表7的R,G,B分量跟表5比较偏差加大了1~2,但造成视觉效果影响并不明显,而表8的中强度相较表6得到了很好的修正.具体效果见图7.
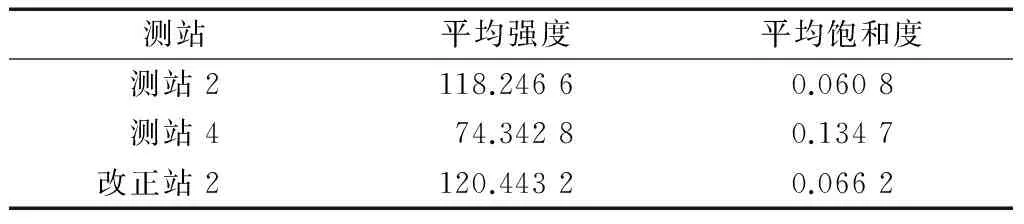
表8 二次改正站与强光反射的原始站强度比较
通过实验可以得出,在白色强光下,颜色修正的效果最佳,但如果光源为黄色或红色,则改正效果略差,会使整体颜色发生一定程度的色偏.遇到这种情况可根据色偏程度,整体调整R,G,B的偏移值以获得更好的显示效果.
3.4 精细纹理的生成
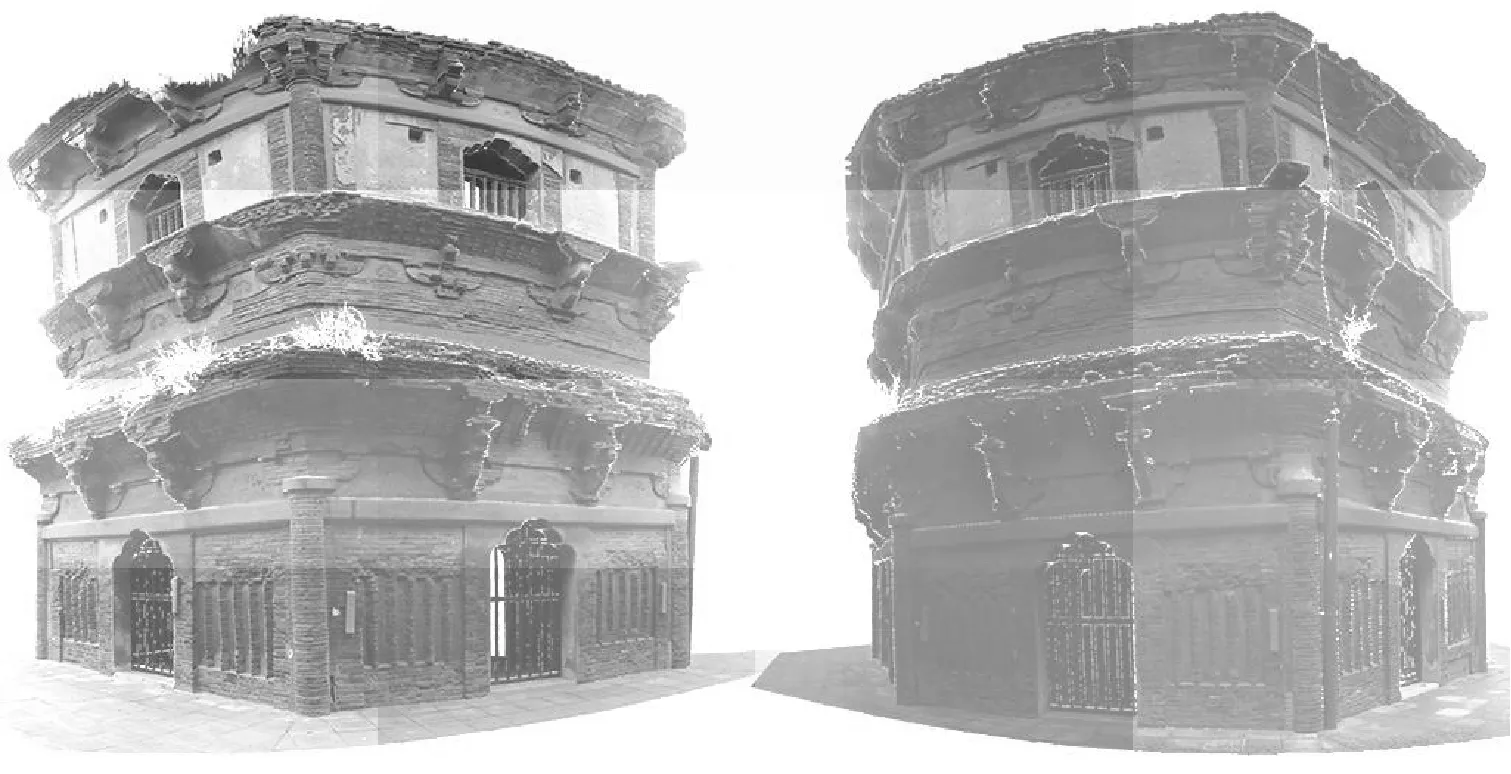
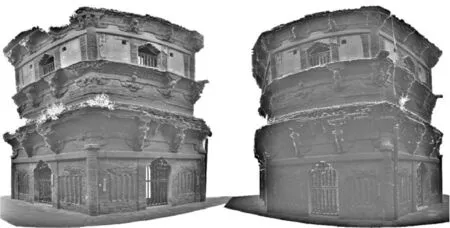
所有测站点云经过匀光匀色后,删去每个测站因受到光源影响导致曝光过度的部分.虽然目标的边缘部分最容易产生曝光过度的情况,但因为测站间存在公共部分,所以单独删除某一测站的边缘部分,并不影响整个目标模型的生成.再将所有处理后的点云数据合并为一个整体,并进行等距离压缩采样.将压缩合并后的点云进行封装,生成三角网格,并根据三个角点的颜色,确定三角网格的颜色.最终得到带有精细纹理的目标三维模型.匀光匀色处理后的宝塔模型与处理前的宝塔模型对比如图8所示.
由图8可以看出,处理前,图8a中测站间的交界部分因为颜色差异形成了明显的颜色条带,而图8b中则因为进行了匀光匀色的颜色修正,其条带等并不明显,测站间的颜色过渡更加缓和,使其一体化的感觉更强.

a 处理前

b 处理后
实验证明,本方法依据现有的地面LiDAR扫描的点云色彩,通过基于色彩坐标转换的方法,实现了快速、自动化的精细纹理生成,提高模型逼真程度的同时,降低了模型纹理制作成本.
4 结语
本文根据地面LiDAR的特性,提出了基于色彩坐标转换的三维点云匀光匀色方法,可以得到精细、统一、逼真的模型纹理,满足现今历史遗迹等地面LiDAR的精细建模的需求.这种方法无需将三维点云转换为二维影像,采用传统影像匀光方法,直接将各站的点云色彩值看作不同色彩空间坐标系下的坐标,通过类似坐标转换的方法对点云色彩进行修正,达到匀光匀色的目的.该方法降低了传统纹理贴图的人工成本,提高了纹理精度,相对于传统二维匀光匀色方法提升了工作效率.该方法不仅可用于地面LiDAR所生成的点云,也可尝试在其他具有颜色信息的点云数据生成精细纹理中推广,并对二维影像图的匀光匀色有一定的参考价值.
[1] 王密, 潘俊. 一种数字航空影像的匀光方法[J]. 中国图像图形学报, 2004,9(6):744.
WANG Mi, PAN Jun. A method of removing the uneven illumination for digital aerial image [J].Journal of Image and Graphics,2004,9(6):744.
[2] 胡庆武, 李清泉. 基于Mask原理的遥感影像恢复技术研究[J]. 武汉大学学报:信息科学版,2004,29(4):319.
HU Qingwu, LI Qingquan. Image restoration based on mask technique[J]. Journal of Wuhan University: Geomatics and Informedion Science, 2004,29(4):319.
[3] 王智均, 李德仁,李清泉. Wallis变换在小波影像融合中的应用[J]. 武汉测绘科技大学学报, 2000, 25(4):338.
WANG Zhijun, LI Deren, LI Qingquan. Application of wallis transform in wavelet based image fusion[J]. Journal of Wuhan Technical University of Surveying and Mapping, 2000, 25(4):338.
[4] 张力, 张祖勋, 张剑清. Wallis滤波在影像匹配中的应用[J]. 武汉测绘科技大学学报, 1999, 24(1):24.
ZHANG Li, ZHANG Zuxun, ZHANG Jianqing. The image matching based on wallis filtering[J]. Journal of Wuhan Technical University of Surveying and Mapping, 1999, 24(1):24.
[5] Rahman Z U, Jobson D J, Woodell G A. Retinex processing for automatic image enhancement.[J]. Proceedings of SPIE: The International Society for Optical Engineering, 2004,13(1):100.
[6] Zhou Q, Oakley J P. Advantages of multiscale product filters for dynamic range compression in images[J]. IEE Proceedings: Vision,Image and Signal Processing, 2006,153(6):851.
[7] Brainard D H, Brunt W A, Speigle J M. Color constancy in the nearly natural image. I. Asymmetric matches[J]. Journal of the Optical Seciety of America A, 1997, 14(9):2091.
[8] Geusebroek J M, Boomgaard R V D, Smeulders A W M,etal. Color constancy from physical principles[J]. Pattern Recognition Letters, 2003, 24(11):1653.
[9] Jameson D, Hurvich L M. Essay concerning color constancy[J]. Annual Review of Psychology, 1989, 40(1):1.
[10] Palus H. Representations of colour images in different colour spaces[M]∥The Colour Image Processing Handbook. NewYork: Springer, 1998.
Colored Terrestrial Light Detection and Ranging Point Clouds Dodging Method
GUO Wang, CHENG Xiaojun, CHENG Xiaolong, LI Quan
(School of Surveying and Geo-informatics, Tongji University, Shanghai 200092, China)
The colored point clouds can be acquired by terrestrial light detection and ranging (LiDAR). The refined texture can be rapidly and automatically generated by colored point clouds. However, these original colored point clouds of different measurement stations have difference in colors which can lead to an unsatisfied display result of generated texture. According to the approximation between color components and spatial coordinate, a dodging based color coordinate conversion method was proposed for dodging the original colored point clouds. The proposed method was verified by experiments and the results show that the color variation of different measurement stations can be modified and a refined texture can be achieved. In addition to terrestrial LiDAR point clouds, this method can be applied to other kinds of terrestrial LiDAR point clouds with colors.
dodging; different colored point cloud; refined texture generated; 3D modeling
2015-11-24
郭 王(1983—),男,博士生,主要研究方向为三维激光扫描技术及点云数据处理等.E-mail:1983guowang@tongji.edu.cn
程效军(1964—),男,教授,博士生导师,工学博士,主要研究方向为数字城市与三维建模等.E-mail:cxj@tongji.edu.cn
P232
A