液压足式机器人单腿等效模型的柔顺性弹跳研究
2016-11-23何玉东王军政汪首坤柯贤锋
何玉东, 王军政, 汪首坤, 柯贤锋
(北京理工大学 自动化学院, 复杂系统智能决策与控制国家重点实验室, 北京 100081)
液压足式机器人单腿等效模型的柔顺性弹跳研究
何玉东, 王军政, 汪首坤, 柯贤锋
(北京理工大学 自动化学院, 复杂系统智能决策与控制国家重点实验室, 北京 100081)
基于弹簧负载倒立摆的足式机器人单腿等效模型是移动机器人领域重要的步态分析模型. 液压足式机器人由于其超强的负载能力以及高动态性能而越来越受到重视. 液压驱动的弹簧负载倒立摆模型作为液压足式机器人关节型机械腿的单腿等效模型,对于液压足式机器人的步态研究具有重要的意义. 本文考虑液压驱动的弹簧负载倒立摆单腿等效模型的单自由度弹跳问题,提出了一种基于主动柔顺的弹跳控制方法,依次对单腿等效模型着地相下降阶段和着地相上升阶段进行独立控制,仿真分析了相关系统参数对弹跳性能的影响,实际弹跳实验表明本文提出的方法能够减小着地冲击力,同时能够对弹跳高度进行有效控制.
液压足式机器人;单腿等效模型;弹簧负载倒立摆;主动柔顺
基于弹簧负载倒立摆(spring loaded inverted pendulum, SLIP)的足式机器人单腿等效模型在机器人领域已经被认为是一种非常简单且有效的奔跑及跳跃步态分析模型. 为研究机器人的高动态行走,学者对SLIP单腿等效模型进行了深入的理论分析,如解析化研究[1-2],步态分析[3]等. 也有学者通过本质上具备柔性的气动机构搭建了SLIP模型实物,进行了弹跳实验[3-4]. 由于液压足式机器人超强的负载能力以及高动态性能[5-6],液压驱动的机器人得到了研究人员的广泛关注. 然而,与气动驱动不同,传统液压驱动是典型的刚性驱动,如何使其具备一定的柔性、减小环境交互力成为机器人控制领域的一个难点.
主动柔顺控制是通过设计控制器使得原本刚性的驱动具备一定柔顺性,以减小环境接触力的一种控制方法,目前已在移动机器人领域[5-7]得到应用. 为减小液压驱动的足式机器人单腿触地冲击力并减少震荡,本文针对只具有垂直方向自由度的SLIP单腿等效模型,提出了主动柔顺控制方法. 同时,通过分析该等效模型的动力学方程,提出了弹跳高度控制方法,实现了液压驱动的单腿等效模型在垂直自由度上的柔顺性着地和弹跳高度控制. 数值仿真分析了主要参数对弹跳性能的影响,给出了参数选择依据和方法,实际弹跳实验验证了本方法的可行性及有效性.
1 液压单腿等效模型
图1为液压单腿等效模型示意图,图中mL为负载质量,La为液压缸长度,Lk为弹簧长度,Lf为足端长度,L为单腿等效模型的总长度,h为模型总的离地高度,k为弹簧刚度.

(1)
式中Lk,0为弹簧的初始长度.
针对单腿等效模型着地相动力学模型(1),本文主要完成了两方面的工作:① 在单腿等效模型的着地相下降过程中,设计液压缸的主动柔顺控制器以减小触地冲击力和震荡;② 在单腿等效模型着地相上升过程中,设计液压缸位置控制器为系统补充能量,使系统达到指定的弹跳高度. 下面首先进行液压缸的主动柔顺控制器设计.
2 液压缸的主动柔顺控制
传统液压缸位置闭环控制使得液压缸位置环刚度大,不具备柔性. 由于行程限制,单腿等效模型的末端弹簧刚度一般较大,从而位置控制刚度较大的液压缸与较大刚度的弹簧进行串联时,单腿等效模型将产生较大的触地冲击力. 另外,液压缸进行纯位置控制时,液压缸的阻尼作用主要由液压缸内部摩擦产生,而这部分摩擦阻尼相对于液压位置控制刚度而言较小,即液压缸的阻尼作用较弱. 因此,单腿等效模型在触地过程中由于低阻尼和弹簧的作用将出现持续震荡,使单腿等效模型稳定时间长.
为减小触地冲击力,防止单腿等效模型触地时的低阻尼震荡,可通过液压缸的控制为系统加入阻尼并减小总的系统刚度,方法之一是将液压缸等效为弹簧阻尼器. 为实现该目的,本文提出了基于位置和力的液压缸力/位置双闭环系统,即液压缸的主动柔顺控制. 其控制框图如图2所示.
图中x0,x和xr分别为液压缸的实际位移给定,实际位移反馈和外环误差值,xe为环境位移,Gs(s)为被控对象系统模型,Ge(s)为接触环境模型,Gr(s)为位置控制器,Gf(s)为目标导纳模型. Δxf为目标导纳输出,由力Fl对应的外环位置误差给定.
根据框图可以得到液压缸位置与负载力的关系模型为
(2)
式中Gp(s)与Ep(s)为内环位置控制的闭环模型以及误差模型,定义如下
(3)
(4)
定义位置误差e=x0-x,结合式(2)~(4)可得力Fl与系统跟踪误差之间的关系为
e=Ep(s)x0+Ep(s)Gs(s)Fl+Gp(s)Gf(s)Fl.(5)
从而,位置系统的跟踪误差受导纳模型Gf(s)的影响,改变了系统对力Fl的灵敏度. 对于纯位置闭环系统,其闭环一般为高刚度,即Ep(s)Gs(s)≈0,主动柔顺控制引入的Gp(s)Gf(s)Fl使得系统的跟踪误差增大,因此,柔顺性控制的实质是牺牲一定的位置控制精度来达到减小冲击力的柔顺性控制效果.
另外,从式(5)也可以看出,当内环控制为具有较高带宽的理想跟踪环节(Gp(s)≈1,Ep(s)≈0)时,有e=Gf(s)Fl. 从而,系统对力Fl的响应即为Fl对目标阻抗模型Gf(s)的响应. 虽然实际的控制系统位置内环带宽有限,必然影响系统对目标阻抗模型的跟踪,但本文的目的是减小冲击,得到系统对冲击的平稳响应,而非得到准确的阻抗特性,因此,本方法能够很好的符合需求. 同时,从图2可见,该方法是在传统位置闭环上加入一个外环阻抗模型,不影响原有的位置闭环结构,因此结构简单,容易实现,易于在原有位置闭环基础上进行改造.
通过改变目标阻抗Gf(s),可以调节液压缸输出位置与负载力之间的关系,取阻抗模型Gf(s)为
(6)
式中:B和K为设计参数,且有Fl=(Bs+K)Δxf,即负载力Fl与目标导纳输出Δxf呈现惯性系统特性,其物理意义即为弹簧阻尼系统.
图2中,以误差xr为实际的液压缸位置环给定,当液压系统具有较高的位置控制精度时,有x≈xr,即x≈x0-Δxf. 从而,液压缸的实际位移误差ΔLa=e=x0-x≈Δxf,考虑液压缸实际的位置控制带宽不可能无穷大,上述设计参数用实际值表示为
(7)
式中:keq为实际的等效刚度;beq为实际的等效阻尼;ΔLa为液压缸位置误差. 从而液压缸在图2所示的控制下表现为弹簧阻尼系统. 经过等效后的液压驱动单腿等效模型如图3所示.
3 单腿等效模型的柔顺性弹跳
将液压缸等效为弹簧阻尼系统后,可利用图3所示的等效模型分析液压驱动单腿等效模型弹跳的着地相动力学方程解. 单腿等效模型的着地相可分为着地相下降阶段和上升阶段,下面分别就这两个阶段介绍单腿等效模型的着地相动力学解及控制策略.
3.1 着地相下降
着地相下降过程中,在给定系统的初始能量前提下,为减小触地冲击力,采用第二节所示方法,可将液压缸等价为弹簧阻尼系统. 同样采用拉格朗日法建立动力学模型,可得得其动力学模型仍然具有方程(1)的形式. 且根据牛顿定律,有力平衡等式
(8)
式中:keq为等效刚度;La,0为液压缸初始长度.
式(1)与式(8)组成等效模型动力学模型的二元微分方程组,利用拉普拉斯变换等方法在给定方程组中各参数的前提下可以一一求出解析解,但是当系统参数调整以后需要重新求取,不利于设计统一的控制器. 由于本文不需要知道弹簧压缩过程的显示表达式,因此可以通过数值方法计算L的值,该方法在系统参数调整以后不需要重新修改控制器参数,利于编程实现.
这里考虑式(1)与式(8)组成的动力学模型的一种特殊情况. 当beq为0,即无阻尼时,可解得
对比式(1)和式(9)可得:若定义系统总刚度为kl,则无阻尼时系统的总刚度为等效弹簧与实际弹簧串联后的刚度,即keqk/(keq+k). 根据弹簧串联特性可知,等效以后的系统相对于原系统而言,总弹簧刚度减小,弹簧与地面的作用力减小,实现了减小冲击力的柔顺着地目的. 而等效阻尼beq的加入可以使得系统衰减震荡,减小单腿等效模型的过渡过程时间.
3.2 着地相上升
在单腿等效模型到达着地相最低点以后,弹簧压缩到最大,为使系统能够快速地补充能量实现弹跳,液压缸采用高刚度的纯位置闭环控制. 同样考虑式(1)所示的动力学方程,设计式(10)所示的液压缸长度La控制方法
(10)
式中:La=La,bottom+vat为压缩到最低时液压缸的长度;va为设计变量,表示液压缸杆的伸出速度.
将式(10)带入式(1),并求解,可得
(11)
式中:C2=[ω2(Lk,0+Lf)+La,bottom-g]/ω2;与通过L及的初值求得.
以支撑相上升起始时刻为时间t0,此时弹簧存储的能量为Ebottom,上升过程液压缸补充的能量由ELa表示,则上升过程有总能量
(12)
从而,将式(11)及其微分带入式(12),可得到系统的总能量. 以tto表示从支撑相进入腾空相的时刻,则根据腾空相的能量守恒,有
(13)
因此,通过调整液压缸速度va的值能够达到调整弹跳高度h的目的.
由于实际系统中存在摩擦、阻尼等现象,直接采用式(13)进行开环的能量补充将会存在一定的稳态误差. 利用实际系统中的激光位移传感器,可以采用闭环的方式进行高度控制,并利用式(13)得到的液压缸速度作为前馈,以提高弹跳高度的控制精度.
4 参数分析与实验
为验证提出方法的有效性,将本文方法在自行研制的一维液压驱动弹跳装置上进行了验证实验.
如图4所示,一维弹跳系统由控制器、泵站和平台组成,平台包括砝码盘、液压缸、伺服阀、力传感器、内置弹簧以及激光测距传感器等. 实验系统的一些基本系统参数如表1所示.
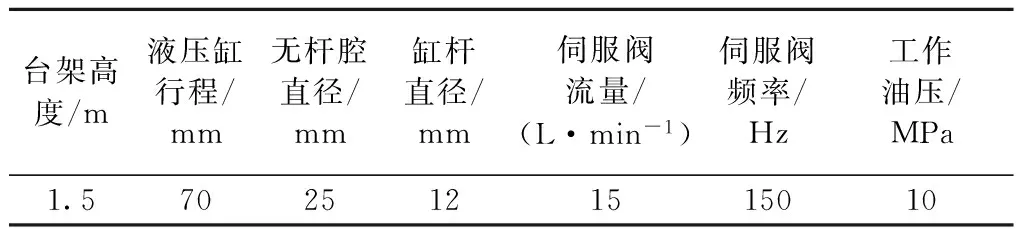
表1 实验参数
4.1 柔顺参数分析与实验4.1.1 主动柔顺参数选择
首先考虑被动弹簧刚度范围确定的情况下,如何选择主动柔顺的等效弹簧刚度以及阻尼系数. 当被动弹簧刚度范围确定以后,系统的总弹簧刚度为主被动弹簧串联时的等效刚度,由于弹簧的压缩量都是有限制的,因此首先应当根据负载质量以及压缩量限制确定主动弹簧的最小刚度,从而选择合适的keq.
在该刚度下,图5给出了在几种不同的被动弹簧刚度下,等效阻尼与单腿等效模型重心高度到达稳态的过渡过程时间关系图. 仿真中用到的参数为:初始重心高度h=0.2 m,keq=16 N/mm,mL=20 kg,Lk,0=100 mm,Lf=120 mm,La0=130 mm,弹簧刚度k的变化范围取20~60 N/mm. 如图5所示,在keq确定、被动弹簧刚度k不同的情况下,beq在1 000 N·s/m附近时单腿等效模型均具有最小的过渡过程时间.
另外,从图5可以看出,当beq小于极值点时,系统的过渡过程时间对阻尼的变化非常敏感,而当beq大于极值时,随着beq的增加过渡过程时间变化缓慢. 对于弹跳系统而言,较大的阻尼吸收了系统较多的能量,不利于弹跳机构起跳,同时,较大的阻尼也会带来触地冲击力的增大. 因此,当系统参数变化时应当选择极值点附近偏小的阻尼值,即牺牲过渡过程时间以达到减小冲击力和利于起跳的目的.
4.1.2 被动弹簧刚度选择
由于被动弹簧的刚度对单腿等效模型的响应至关重要,如何选择合适的被动弹簧成为实际控制中不可忽视的问题. 如4.1.1节所述,根据弹簧的压缩量以及负载的质量可以得到基本的弹簧刚度范围. 弹簧在刚度k∈[20,80] N/mm内变化时,单腿等效模型的调节时间以及与地面的接触力曲线如图6所示.
由图6可见,随着弹簧刚度k的增大,调节时间ts逐渐减小,接触力随之增大. 综合考虑调节过程的时间以及与地面的冲击力,可在接触力小于一定值的前提下选择调节时间较短的k值. 考虑实际弹簧的刚度不可能任意选取,本文后续实验选择k=40 N/mm.
依照上述参数的选择过程,可得参数选择方法:① 根据负载质量及弹簧压缩量限制选择等效后的总弹簧刚度;② 根据被动弹簧刚度范围与总的等效弹簧刚度确定主动弹簧刚度keq;③ 根据图5选择阻尼beq;④ 根据图6在被动弹簧刚度范围内确定合适的k.
4.1.3 柔顺性实验
为验证本文提出的主动柔顺控制的实际性能,利用前文所示的参数选择方法,将得到的beq,keq以及被动弹簧刚度k运用于单自由度弹跳装置,在相同高度、不同负载情况下进行了自由落体实验. 在刚度为40 N/mm的弹簧下,分别以12 kg和18 kg的重物作为负载时,柔顺性控制的力响应曲线如图7与图8所示. 由图可见,相对于未加入主动柔顺的控制,本文提出的方法在一次震荡后就使系统达到稳态,并且过程中最大冲击力减小了10%以上,二次冲击力减小了74%以上,柔顺性以及减震效果明显. 同时,当负载质量发生变化时,本文提出的方法在不改变控制参数的情况下均具有相同的控制效果.
4.2 弹跳参数分析与实验
4.2.1 初始能量的作用
在着地相上升过程中,根据前文分析可知,系统能够弹跳的高度是由起跳时弹簧压缩的能量以及起跳过程中液压缸补充的能量来决定的. 因此,分析系统的弹跳高度与二者的关系,得到图9所示的三维曲面. 图中,va表示液压缸伸出速度,ΔLk0表示弹簧的初始压缩量,h为弹跳高度.
由图9可见,若以单腿等效模型着地相压缩量最大时刻为初始时刻,则当初始时刻弹簧的压缩量ΔLk0增大时,最大弹跳高度增加. 为便于观察,取初始弹簧压缩量为10 mm的曲线如图10所示,可见系统可达的最大弹跳高度并非随着液压缸伸出速度va的增加而增加,而是存在一个极值点,这是由于当va增加后,系统的能量虽然增加很快,但是快速的能量增加使得系统迅速的脱离着地相进入腾空相,反而使得作用时间减小. 因此,为最大限度地增加弹跳高度,不能盲目地提高液压缸的伸出速度. 从图9可见,随着初始能量的增加,最大弹跳高度点对应的液压缸速度是不断增加的,即着地相压缩阶段结束时,弹簧的压缩量越大,则越可以通过提高液压缸伸出速度va以增加弹跳高度.
需要说明的是,对于实际弹跳系统,弹簧的初始压缩量是由初始给定的能量决定的,其给定方式可以是单腿等效模型的下落速度,也可以是自由落体的高度,因此,这里弹跳高度与初始压缩量的关系也是弹跳高度与单腿等效模型的初始给定能量之间的关系.
4.2.2 预紧力对弹跳高度的影响
前文分析了弹簧初始压缩量对弹跳高度的影响. 初始压缩量是起跳时系统能量的一种表示,这里考虑另一种能量的表示,即弹簧的预紧力.
在上述分析中,没有考虑在整个弹跳过程中弹簧是否会超出其可压缩范围,但由于本文考虑的弹簧具有较大的刚度,弹跳过程中弹簧的压缩量不大,因此上面得到的结论是成立的. 但对于一些刚度较软的弹簧,则应当考虑弹簧压缩量的约束. 加入预紧力可以防止弹簧超过其可压缩范围[8],实现能量存储,同时还能防止安装松动导致的机械磨损降低弹簧的使用寿命.
图11给出了相同初始能量下预紧力的大小对弹跳高度的影响. 由图11可见,当预紧力增大时,最大弹跳高度呈现减小趋势,其原因是预紧力的加入使得初始压缩的能量被存储而得不到释放,因此弹跳高度减小. 另外,从图11还可以得出,随着预紧力的增加,最大弹跳高度对应的液压缸速度va也在逐渐减小,一定程度以后,该速度将趋向于0,这意味着增加液压缸的伸出速度已无法增加弹跳高度. 因此,在设计弹跳实验时不能过度加大预紧力,如果出现弹跳高度可控范围降低或者不可控时,应当重新选取合适刚度的弹簧.
4.2.3 弹跳实验
利用本文提出的弹跳方法,在实际系统上进行了弹跳高度的控制实验. 系统弹跳开始时具有的初始高度610 mm,首先给定弹跳高度为650 mm,在一定的弹跳次数以后,将弹跳高度增加为680 mm,得到图12所示的曲线. 实验中通过测量得到实验的基本参数为:k=40 N/mm,keq≈16 N/mm,beq≈890 N·s/m,预紧力为40 N. 需要指出的是,如前文所述,等效弹簧的刚度keq和阻尼beq与液压缸的位置闭环控制精度有关,因此其实际值只能通过测量的方法获得,因此上述keq和beq值是通过实际的力、位置误差以及速度误差计算得到.
由图12可见,无论是在650 mm还是680 mm高度处,弹跳系统都能具有较好的高度跟踪效果,其稳态跟踪误差小于3%. 在给定高度变化以后,经过4个弹跳周期的能量补充,系统就能够跟踪新的给定高度,可见本文提出的方法具有较好的高度适应性.
5 结 论
本文研究了液压驱动的弹簧负载倒立摆单腿等效模型,在其动力学模型分析的基础上,提出了一种基于液压缸主动柔顺控制的单自由度弹跳方法,通过仿真分析得到了主要参数的选择方法. 实际的弹跳实验验证了本文提出方法的可行性以及有效性,在减小着地冲击力的同时还能够对弹跳高度进行有效控制.
[2] 李满天,于海涛,郭伟,等.基于摄动理论的SLIP模型解析化研究及其运动控制[J].机器人,2012(6):689-696.
Li Mantian, Yu Haitao, Guo Wei, et al. Research on the analyticity of SLIP model based on perturbation theory and locomotion control[J]. Robot, 2012(6):689-696.(in Chinese)
[3] Raibert M, Chepponis M, Brown H B Jr. Running on four legs as though they were one[J]. Robotics and Automation, IEEE Journal of, 1986,2(2):70-82.
[4] Raibert M H, Brown H B, Chepponis M. Experiments in balance with a 3D one-legged hopping machine[J]. The International Journal of Robotics Research, 1984,3(2):75-92.
[5] Raibert M, Blankespoor K, Nelson G, et al. Bigdog, the rough-terrain quadruped robot[C]∥Proceedings of the 17th World Congress. [S.l.]: IEEE,2008:10823-10825.
[6] Semini C. HyQ-design and development of a hydraulically actuated quadruped robot[D]. Genoa, Italy: University of Genoa, 2010.
[7] Spröwitz A, Tuleu A, Vespignani M, et al. Towards dynamic trot gait locomotion: design, control, and experiments with cheetah-cub, a compliant quadruped robot[J]. The International Journal of Robotics Research, 2013,32(8):932-950.
[8] Terry P, Byl K. An analytically computable model and energy-based control for a realistic series-elastic 1D hopper on rough terrain[C]∥Proceedings of the Intelligent Robots and Systems (IROS 2014), 2014 IEEE/RSJ International Conference on. [S.l.]: IEEE, 2013.
(责任编辑:李兵)
Research on Compliant Hopping for Equivalent Model of Hydraulic Robot Leg
HE Yu-dong, WANG Jun-zheng , WANG Shou-kun , KE Xian-feng
(Key Laboratory of Intelligent Control and Decision of Complex Systems, School of Automation,Beijing Institute of Technology, Beijing 100081, China)
Spring loaded inverted pendulum (SLIP) based equivalent leg is an important gait analyzing model in the realm of mobile robot. Due to superb load capacity and dynamic performance, hydraulic based robot has gained more popularity. As an equivalent model for articulated leg in hydraulic legged robot, hydraulic activated SLIP model shows its importance in hydraulic robot gait analysis. In this paper, analyzing the hydraulic actuated 1-DOF SLIP model, an active compliance based hopping method was proposed. And the separation control for stance phase compression and decompression stage was conducted. System parameters were analyzed with simulation for hopping performance and hopping experiments verified the effectiveness of impact force reduction and hopping height control performance.
hydraulic legged robot; equivalent leg; SLIP model; active compliance
2015-06-23
国家高技术研究发展计划资助项目(2011AA041002)
何玉东(1987—),男,博士生,E-mail:yudonghe@foxmail.com;王军政(1964—),男,教授,博士生导师,E-mail:wangjz@bit.edu.cn.
TP 242.6
A
1001-0645(2016)08-0820-07
10.15918/j.tbit1001-0645.2016.08.009