固定翼无人机航磁探测系统的磁补偿模型分析
2016-11-20王婕郭子祺刘建英
王婕, 郭子祺, 刘建英
中国科学院遥感与数字地球研究所 遥感科学国家重点实验室, 北京 100101
固定翼无人机航磁探测系统的磁补偿模型分析
王婕, 郭子祺*, 刘建英
中国科学院遥感与数字地球研究所 遥感科学国家重点实验室, 北京 100101
近年来,无人机的应用日益广泛,逐渐用于航空物探。在使用固定翼无人机搭载磁力仪进行航磁测量时,必然引入飞行平台干扰,包括与机动无关的干扰和与机动有关的干扰。去除和飞机机动有关的磁干扰,即为磁补偿工作。航磁补偿的经典TOLLES-LAWSON模型将磁干扰分为剩余磁场、感应磁场和涡流磁场。对于固定翼无人机,涡流磁场可以不考虑,将剩余磁场和感应磁场合称为稳态干扰场。主要对飞机干扰的来源和性质进行分析,并在地面设计实验验证铁磁性材料的性质,以加深对磁补偿模型的假设和推导过程的理解。最后,在地面实验平台上测量了飞机磁干扰场的平面分布图,指导航空磁力仪的安装。在将TOLLES-LAWSON模型应用于固定翼无人机航磁探测系统的磁补偿工作时,无人机与有人机相比,在结构和材料方面都有较大差异,因此对模型的物理意义和假设条件的深入理解至关重要,此即本文所述工作成果的出发点。
磁补偿; 固定翼无人机; 航磁探测系统; 飞机磁干扰; 剩余磁场; 感应磁场
航磁探测起源于20世纪40年代,在二战期间用于探测潜艇[1]。二战结束后,逐渐用于物探[2]、地磁导航[3]。近年来,无人机由于经济安全和机动灵活,在很多领域得到应用。固定翼无人机飞行稳定,续航时间相对较长,本文所述的航磁探测系统即采用固定翼无人机,服务于物探成图,用于提取地质构造信息和相关固体矿产勘探。磁力仪一般都是采用硬连接的方式[4-5],这就使得磁力仪不可能距离飞机足够远,因此,在磁力仪中必然会引入飞行平台的磁干扰。
要去除飞行平台磁干扰,首先要对飞机的干扰进行分析,根据干扰源的不同性质建模。磁补偿是去除飞机干扰中和飞机机动有关的部分。最早的磁补偿工作是1944年由美国海军部门的Tolles和Lawson发表的[6-7],是针对探测潜艇引起的磁异常。随着磁力仪精度的提高,信号处理技术的日新月异,磁补偿的重要性也就日益凸显,而后续的工作也仍然是在TOLLES-LAWSON模型上进行改进的[8-11]。因此,对于不同情况的磁补偿工作而言,对该模型的理解都至关重要。
之前的航磁测量都是使用有人机,市场上针对有人机已有成熟的磁补偿器,如加拿大RMS公司最新的带数据采集的实时补偿器DAARC500。但在材料和结构方面,无人机和有人机都有一定区别,因此需要对固定翼无人机磁干扰的性质进行深入分析,本文将对模型的推导过程进行详细介绍,明确模型的前提条件,并通过一些实验验证,使得在加深理解的基础上更好地应用。也希望这部分内容对地磁导航工作中的磁补偿工作有参考价值[12-14]。
1 磁干扰概述
本文将磁干扰根据不同的性质分为:与机动无关的干扰和与机动相关的干扰。这一划分的根据是,当飞机的状态发生变化时,如姿态或者加速度的变化,干扰的量值是否发生变化。
与机动无关的干扰包括系统静态噪声、探头本身的转向差等。航磁系统的静态噪声包括仪器电路电磁干扰以及飞机引入的电磁干扰等构成的本底噪声。转向差是指仪器本身在空间固定一点由于朝向变化而产生的偏差。
磁补偿模型针对与机动相关的部分,这部分干扰随飞机的机动变化而变化。TOLLES-LAWSON模型将飞行平台的磁干扰场分为剩余磁场、感应磁场和涡流磁场[15]。其中,将剩余磁场和感应磁场划分为稳态磁场干扰,所谓“稳态”是指,在外部磁场环境稳定且飞机处于静止状态时,仍然存在的干扰,区别于涡流磁场干扰。
涡流磁场干扰,是导体在磁通变化时激发涡电流所引起的磁场,主要是由运动产生的。在磁补偿工作中,无人机和有人机相比,最大的区别在于无人机机身材料一般是非金属材料(如玻璃钢),而涡流磁场最主要的来源就是机翼大片的金属材料,所以,在无人机的磁补偿工作中,一般不考虑涡流磁场的干扰。
航磁探测系统的磁干扰的分类如下:
1) 与机动无关:静态噪声和转向差。
2) 与机动有关:剩余磁场、感应磁场和涡流磁场。稳态磁场包括剩余磁场和感应磁场。
2 与机动无关的干扰
2.1 静态噪声
根据DZ/T 0142—2010航空磁测技术规范[16],将航空磁力仪系统在飞机上安装好以后,在地面打开电源工作,观测收录时间不少于2 h,采样间隔为0.5 s。对收录数据按式(1)计算航空磁力仪地面静态噪声水平四阶差分值表征静态噪声水平Sn:

(1)

在本次试验中,静态噪声水平为0.35 nT,而DZ/T 0142—2010航空磁测技术规范中要求Sn<0.1 nT,也就是说,本系统还不符合要求,需要进一步改进压制干扰。
2.2 转向差
本文中转向差是指磁力仪探头本身的转向差,在空间同一点测量,当光泵探头光轴正向和磁场方向的夹角(即为翻转角Tumble angle)变化时,测量值会发生小幅度的变化。以加拿大SCINTREX公司的CS-3光泵探头为例,图1为修改自SCINTREX的CS-3使用手册,显示北半球偏差值随翻转角的变化情况。可以看出,在正常使用的范围内,转向差很小,只在接近死区时,转向差变化很大,在死区内光泵不能正常工作。

图1 CS-3光泵磁力仪转向差 Fig.1 Heading error of CS-3 optically pumped magnetometer sensor
3 与机动相关的干扰
磁力仪测得的信号为地磁场和飞机干扰场矢量叠加后的总场信号,当飞机姿态发生变化时,由于飞机和地磁场的相对位置发生变化,飞机干扰场在信号中的分量也随之变化。
3.1 稳态干扰场物源

飞机上铁磁性材料主要是对力学强度要求比较高的零部件,如发动机、舵机、螺丝、钢轴承、起落架等。图2为一翼展约3 m的固定翼无人机以及发动机和副翼舵机的特写。另外,飞机上的仪器中的磁铁、通电导线也会产生磁干扰。

图2 固定翼无人机及主要铁磁性零部件Fig.2 Fixed-wing UAV and its main ferromagnetic parts
3.2 磁补偿模型
稳态干扰磁场包括剩余磁场和感应磁场,TOLLES-LAWSON的磁补偿模型也是根据干扰的性质建模的。从物理模型转化为数学模型的过程中,该模型最基本的两个假设为[1]:
1) 假定飞机上的磁性物体均为均匀磁化体,且各磁性体刚性连接。
2) 在对飞机进行补偿的过程中,假定地磁场是常量。
在上述前提下,稳态干扰场Δ可表示为
Δ=a1cosX+a2cosY+a3cosZ+
T0(a4cos2X+a5cosXcosY+a6cos2Y+
a7cosXcosZ+a8cosYcosZ+a9cos2Z)
(2)
式中:Δ为稳态干扰场;a1、a2和a3为剩余磁场补偿系数;cosX、cosY和cosZ为地磁场方向分别和飞机磁补偿坐标系x、y、z轴夹角的余弦,如图3所示,由三轴磁通门测量值转换得到;a4~a9为感应磁场的补偿系数;T0为地磁测量信号,一般使用光泵航空磁力仪测量。
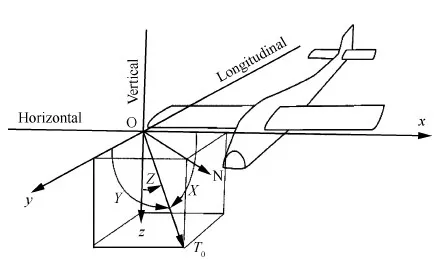
图3 飞机磁补偿坐标系(修改自Tolles[7])Fig.3 Coordinate system of aeromagnetic compensation (modified since Tolles[7])
3.3 磁补偿工作流程
对于同一架结构固定的飞机,短时间内补偿系数是不变的。首先,要设计补偿方案,获得飞机在不同姿态下的测量值,即补偿数据,比如在一定方向的航线上作小范围内的俯仰、滚转、偏航动作,即补偿飞行[20],用该数据求取补偿系数,然后在实际飞行任务中,根据以上模型计算出飞机的干扰场,从航磁信号中剔除。
求解系数时,要求模型中其他量都作为已知的输入量,那么就要求在获取补偿数据的场地内,地磁场T0是均匀不变的,这是计算补偿系数的前提条件,比如补偿飞行一般要求飞机达到2 km以上的高空,以便获得较小的地磁梯度。磁补偿模型中,cosX、cosY、cosZ可由三轴磁通门获得。补偿飞行获得数据后,首先要进行地磁日变改正、垂直梯度场改正,然后在滤波后输入模型,计算补偿系数。补偿系数的计算相当于方程组求解,需要选择合适的反演方法获得最优解,如最小二乘法。在做完磁补偿工作后,还需要对补偿质量进行评价[20]。磁补偿的一般工作流程如图4所示。

图4 航磁补偿一般流程Fig.4 Flowchart of normal aeromagnetic compensation
其中,对磁补偿模型的理解,决定了后续工作方案的选取,是正确应用磁补偿模型的前提。下面针对该模型进行详细分析。
4 稳态干扰场磁补偿模型分析
4.1 剩余磁场
剩磁,即剩余磁化强度,对于飞机而言,主要是铁磁性材料的零件在加工过程中,由于外部磁场的存在而获得的磁化强度,以热剩磁为主。在一般情况下,剩磁的大小基本稳定,因此文献中多称为“恒定磁场”[1],但剩磁也不是永远恒定的,如剧烈的撞击或者磁性弛豫,都会使剩磁发生变化,为严谨起见,本文使用“剩余磁场”来描述这部分干扰。
剩磁的大小,与外部磁场无关,相对于飞机坐标系是不变的,其方向是任意的。将剩磁Δr分解到磁补偿坐标系的三轴上,分别平行于x、y和z轴的分量为a1、a2和a3。当飞机姿态变化时,与地磁场的夹角变化,因而在地磁场方向的大小发生变化。航磁探测的信号是由光泵测量得到的总场标量信号,那么Δr在总场中的分量是随飞机姿态变化的,可表示为
Δr=a1cosX+a2cosY+a3cosZ
(3)
式中:Δr为飞机的剩磁干扰。
需要注意的是,式(3)有一个前提,即干扰场要远小于地磁场。如图5所示,光泵测量值为总场OC的大小,OA表示地磁场,OB表示剩磁。式(3)的含义为,测量得到Δr为三轴分量分别在总场方向投影的总和,即为OB在总场方向的投影CD的大小,只有在剩磁OB远小于OA时,地磁场值OA≈OD=OC-CD才能成立。因此,在探头附近及距离的地方不能有铁磁性材料的零部件,否则干扰场远小于地磁场目标信号的前提不成立,将引入较大误差。

图5 地磁标量测量信号与剩磁干扰的关系Fig.5 Relationship between geomagnetic scalar signal and residual magnetization interference
为验证剩磁的性质,特加工一根长为30 cm、直径为3 cm的45号钢圆柱形铁棒,用光泵磁力仪探测该铁棒的外部磁场。实验是在一个定制的实验台上进行的,如图6所示,该实验台全部采用无磁材料,支架使用玻璃钢,台面使用亚克力板,螺栓使用高强度塑料的。实验台距地面为0.8 m,平台上10 cm×10 cm的节点上钻孔标记位置。使用的是CS-3光泵磁力仪,探头置于定制的固定底座上,底座下有小凸起,刚好可以卡在试验台节点的钻孔上以固定位置。对实验台上每个10 cm×10 cm的小区域编号,磁力仪探头放置在底座内,可以在平台上任意移动,并固定在某一位置,方便在测量时操作人员移动磁力仪探头并远离仪器后,探头仍保持固定不动。
在一条南北向测线上,探头固定在测线一端不动,从靠近探头的一侧移动铁棒,不断远离探头,在沿着测线的25个点上分别进行测量,减去背景场后,绘制出异常大小随距离变化的曲线,即为“正向/敲击前”的曲线。将铁棒方向掉转180° 后,重复以上步骤,得到“反向/敲击前”的曲线。用硬物猛击铁棒后,使铁棒正向重复以上步骤,得到“正向/敲击后”的曲线,如图7所示。
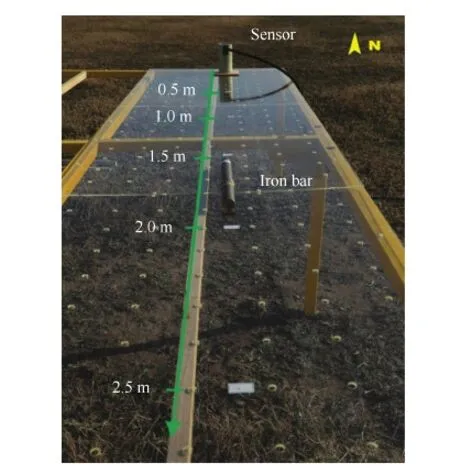
图6 铁棒磁测实验现场示意图Fig.6 Schematic of iron bar magnetic measurement

图7 铁棒磁测实验结果Fig.7 Results of iron bar magnetic measurement
敲击前正反向两条曲线对比可以看出,掉转180° 之后极性改变,说明这根铁棒是剩磁占主导。在敲击后,异常曲线明显低于敲击前,说明受到撞击后,剩磁发生变化。因此,在飞机受过撞击或久置不用后,剩磁会发生变化,需要重新计算磁补偿系数。
4.2 感应磁场
感应磁场是飞机内铁磁性物体受地磁场磁化产生的,大小及方向随飞机姿态和地磁场变化而变化。主要是由飞机发动机、起落架、钢轴承等的软磁性材料组成的器件产生的[1]。这些零件大多是棒状圆柱状,可将其近似为一个个不同长宽比的圆柱体,求解圆柱体在周围产生的磁场,建立感应磁场补偿模型[6-7]。
磁力仪探测的是磁介质圆棒外部空间某一固定点的磁感应强度。设一磁介质圆棒,长为l,直径为d,以中心点为坐标原点。本文仅以轴线上与原点距离为x的点的磁感应强度B的计算为例:
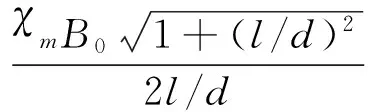
(4)

可以看出,对于一个材料和形状都不变的圆棒,在轴线上任一点产生的磁感应强度与轴向的背景场大小成正比。在空间任一点的计算公式的形式与式(4)类似,但较为复杂,此处不列出。与式(4)相比,只是与位置相关的部分发生变化,对于确定的空间任一点,铁磁性圆棒在磁力仪探头处产生的感应磁场大小Δi仍然与轴向的背景场成正比。
Δi=wT0cosφ
(5)

地磁场在圆棒处的磁场大小为T0,圆棒的轴向是任意的,将此任意轴向的圆棒分解为分别沿磁补偿坐标系三轴的3个圆棒,则分别受到地磁场3个分量的磁化,则沿x、y、z轴方向的3个圆棒在磁力仪探头处产生的感应磁场大小分别为
(6)
式中:Δix、Δiy和Δiz分别为平行于x、y和z轴的圆棒在探头处产生的感应场大小;wx、wy和wz为影响感应磁化强度的常系数。
分解到沿x轴方向的铁棒,在磁力仪处产生的感应磁场大小为Δix,方向有可能为空间内任意指向,将其分解到飞机坐标系三轴,相当于Δix在x、y和z三轴的投影,对应三分量为Δixx、Δixy和Δixz,表达式分别为
(7)
式中:wxx、wxy和wxz分别为wx在x、y和z轴方向的投影值,此处设wx的方向为沿x轴铁棒产生感应磁场的方向。

(8)


wxxT0cos2X+(wxy+wyx)T0cosXcosY+
wyyT0cos2Y+(wxz+wzx)T0cosXcosZ+
(wyz+wzy)T0cosYcosZ+wzzT0cos2Z
(9)
飞机上所有圆棒产生的感应磁场Δi,按照叠加定律,可得
Δi=T0(a4cos2X+a5cosXcosY+a6cos2Y+
a7cosXcosZ+a8cosYcosZ+a9cos2Z)
(10)
需要注意的是,不能等效于圆柱体的铁磁性零件产生的磁场,则不能用这个模型完全补偿,包含在磁补偿的误差中。圆柱体的特别之处在于,可以看成只受平行于柱体轴向的磁场分量的磁化,当飞机姿态变化时,即使地磁场不变,地磁场在磁补偿坐标系三轴的分量也会发生变化,感应磁场随之变化。不难理解,如果是球体,由于各项同性,在姿态变化时,由于地磁场不变,其产生的感应磁场始终不变,显然和模型不符。
5 固定翼无人机磁场实测
磁力仪的安装位置,要避开无人机磁干扰较大的区域,这就需要了解飞机磁干扰场的量级及分布。
获得飞机磁干扰平面分布的实验步骤如下:
1) 先选好一块地磁梯度很小的场地(选择地表均匀的区域,用磁力仪先粗测,确保本次实验整个区域内的地磁梯度在2 nT以内),在平台上移动磁力仪探头底座,逐点记录背景值。
2) 将无人机置于实验台下方,如图8所示,在实验台上移动磁力仪探头,逐点进行测量并记录。
3) 将放置无人机后每个点的数据减去对应的背景场,进行网格化,绘制成飞机磁干扰场的平面分布图,如图9所示。
另外,实验进行的时间是在下午5点左右,地磁场随时间变化不大,整个测量过程在1 h内完成,故处理数据时未考虑地磁场日变的影响。

图8 飞机磁干扰地面测量现场示意图Fig.8 Schematic of aeromagnetic interference ground measurement

图9 飞机磁干扰平面分布图Fig.9 Distribution of aeromagnetic interference
由图9可以看出,发动机、机舱中部、副翼舵机处和尾翼附近有明显的异常,发动机磁性很大。光泵探头安装时,要尽量远离发动机,也不能离舵机太近,可以选择翼尖和飞机尾部。
6 结 论
磁补偿工作一直沿用TOLLES-LAWSON模型,这一模型在有人机上的应用已经比较成熟。在无人机的磁补偿工作中,要更好地应用该模型,需要分析清楚磁干扰来源及性质,明确模型有效的前提条件,在仪器布局上尽量合理以最大程度降低干扰。该模型的假设包括:
1) 假定飞机上的磁性物体均为均匀磁化体,且各磁性体刚性连接。
2) 在对飞机进行补偿的过程中,假定地磁场是常量。
3) 在标量测量系统中,干扰场要远小于地磁场。
4) 产生感应磁场的铁磁性部件,可等效为分别平行于飞机正交三轴的圆柱形铁棒。
只有在满足以上前提条件的情况下,该模型才能有效去除飞机磁干扰场中与机动有关的部分。这部分干扰,主要来源于飞机上的铁磁性零部件,如发动机、舵机等。
针对以上前提条件,为提高补偿质量,在磁补偿工作中,尤其是磁力仪的安装,需要注意一些细节。
对于假设1),要保证飞机上的铁磁性零部件为硬连接,一般情况下都能满足。
对于假设2),在获取补偿数据时,要求地磁场值接近常量,需要对补偿场地的地磁梯度进行测量,避开地磁梯度大的区域。
对于假设3),使用标量测量系统时,如光泵磁力仪,要求干扰场远小于地磁场,在磁力仪附近没有磁性体时,基本都能满足。中国北方的地磁场大小都在5×104nT左右,而磁性体磁场的量级,可参考图6所示的铁棒磁场曲线,随距离衰减很快,长为30 cm、直径为3 cm的45号钢圆柱形铁棒在距离1 m远处产生的磁场量级为10 nT左右,远小于地磁场。
对于假设4),产生感应磁场的铁磁性零部件,如发动机上的轴承、起落架等的形状都可以看成圆柱体,基本满足条件。而不满足该假设的部分,即为磁补偿的误差。注意,对以剩余磁场为主的零件则没有这个要求,产生剩磁的如小磁铁块、碳钢材料的零件等。
另外,飞机受到撞击或久置不用后,剩磁会发生变化,要重新计算磁补偿系数。
光泵探头安装时,要尽量远离大的干扰源,如发动机,也不能离舵机太近,可以选择翼尖和飞机尾部。
[1] 何敬礼. 飞机磁补偿、 磁补偿器的历史、 现状和发展趋势[J]. 地学仪器, 1991, 3: 1-7.
HE J L. History, present and trends of airborne magnetic compensation and compensator[J]. Equipment for Geotechnical Engineering, 1991, 3: 1-7 (in Chinese).
[2] 张昌达. 重磁与时间域电磁法发展趋势研究[M]. 武汉: 中国地质大学出版社, 2013: 83-92.
ZHANG C D. Development trend of geomagnetic, gravitation and time domain electromagnetic methods[M]. Wuhan: China University of Geosciences Press, 2013: 83-92 (in Chinese).
[3] 刘诗斌. 无人机磁航向测量的自动罗差补偿研究[J]. 航空学报, 2007, 28(2): 411-414.
LIU S B. Study on automatic magnetic deviation compensation of magnetic heading measurement for UAV[J]. Acta Aeronautica et Astronautica Sinica, 2007, 28(2): 411-414 (in Chinese).
[4] GOPAL B V, SATMA V N, RAMBABU H V. Real time compenstion for aircraft induced noise during high resolution airborne magnetic surveys[J]. Journal of Indian Geophysical Union, 2004, 8(3): 185-189.
[5] 李晓禄, 蔡文良. 运5飞机上航磁梯度测量系统的安装与补偿[J]. 物探与化探, 2006, 30(3): 224-228.
LI X L, CAI W L. The assembly and compensation of the aeromagnetic gradiometic system on the Y-5 aircraft[J]. Geophysical and Geochemical Exploration, 2006, 30(3): 224-228 (in Chinese).
[6] TOLLES W E. Magnetic field compensation system: US2706801[P]. 1955-04-19.
[7] TOLLES W E. Compensation of aircraft magnetic fields: US2692970[P]. 1954-10-26.
[8] BICKEL S H. Error analysis of an algorithm for magnetic compensation of aircraft[J]. IEEE Transactions on Aerospace and Electronic Systems, 1979, 15(5): 620-626.
[9] BICKEL S H. Small signal compensation of magnetic fields resulting from aircraft maneuvers[J]. IEEE Transactions on Aerospace and Electronic Systems, 1979, 15(4): 518-525.
[10] LEACH B W. Aeromagnetic compensation as a linear regression problem[J]. Information Linkage between Applied Mathmatics and Industry II, 1980, 3: 139-161.
[11] RICE J A. Automatic compensation for an airborne magnetic anomaly detector: US5182514[P]. 1993-01-26.
[12] 范成叶, 李杰, 陈文蓉, 等. 电子罗盘安装误差标定与补偿方法研究[J]. 传感技术学报, 2013, 26(5): 622-626.
FAN C Y, LI J, CHEN W R, et al. Reserch on calibration and compensation method on installation errors of electronic compass[J]. Chinese Journal of Sensors and Actuators, 2013, 26(5): 622-626 (in Chinese).
[13] 李季, 潘孟春, 罗诗途, 等. 半参数模型在载体干扰场补偿中的应用研究[J]. 仪器仪表学报, 2013, 34(9): 2147-2152.
LI J, PAN M C, LUO S T, et al. Study on the application of semi-parametric model in vehicle interferential magnetic field compensation[J]. Chinese Journal of Scientific Instrument, 2013, 34(9): 2147-2152 (in Chinese).
[14] 李季, 张琦, 潘孟春, 等. 载体干扰场补偿办法[J]. 国防科技大学学报, 2013, 35(3): 7-11.
LI J, ZHANG Q, PAN M C, et al. The vehicle interferential magnetic field compensation method[J]. Journal of National University of Defense Technology, 2013, 35(3):7-11 (in Chinese).
[15] LELIAK P. Identification and evaluation of magnetic-field sources of magnetic airborne detector equipped aircraft[J]. IRE Transactions on Areospace and Navigational Electronics, 1961, 3: 95-105.
[16] 中华人民共和国国土资源部. 航空磁测技术规范: DZ/T 0142—2010[S]. 北京: 中国标准出版社, 2010: 19-20.
Ministry of Land and Resources of the People’s Republic of China. Criterion of aeromagnetic survey: DZ/T 0142—2010[S]. Beijing: Standards Press of China, 2010: 19-20 (in Chinese).
[17] 刘晓杰. 航磁补偿技术研究[D]. 长春: 吉林大学, 2009.
LIU X J. Study on aeromagnetic compensation technique[D]. Changchun: Jilin University, 2009 (in Chinese).
[18] 吴文福. 16项自动磁补偿系统[J]. 声学与电子工程, 1994, 4: 14-21.
WU W F. 16 factors of auto-magnetic compensation[J]. Acoustics and Electronics Engineering, 1994, 3: 14-21 (in Chinese).
[19] 吴文福. “海燕”机航磁仪的磁补偿方法和结果[J]. 物探与化探, 1983, 11(3): 7-32.
WU W F. The method and result of compensation for airborne magnetometer on Haiyan aircraft[J]. Geophysical and Geochemical Exploration, 1983, 11(3): 7-32 (in Chinese).
[20] 王林飞, 薛典军, 熊胜青, 等. 航磁软补偿质量评价方法及软件实现[J]. 物探与化探, 2013, 37(6): 1027-1030.
WANG L F, XUE D J, XIONG S Q, et al. The method of quality assessment for digital magnetic compensation and software realization[J]. Geophysical and Geochemical Exploration, 2013, 37(6): 1027-1030 (in Chinese).
王婕女, 硕士研究生。主要研究方向: 磁补偿技术。
E-mail: wangjie01@radi.ac.cn
郭子祺男, 硕士, 研究员。主要研究方向: 地球物理勘探设备。
Tel.: 010-64889206
E-mail: guozq@radi.ac.cn
刘建英女, 硕士, 助理研究员。主要研究方向: 无人机飞行自动控制算法。
E-mail: liujianying_1234@163.com
*Correspondingauthor.Tel.:010-64889206E-mail:guozq@radi.ac.cn
Analysisonmagneticcompensationmodeloffixed-wingUAVaeromagneticdetectionsystem
WANGJie,GUOZiqi*,LIUJianying
StateKeyLaboratoryofRemoteSensingScience,InstituteofRemoteSensingandDigitalEarth,ChineseAcademyofSciences,Beijing100101,China
Inrecentyears,applicationofUAVshasbeenincreasinglywidespread,andUAVsaregraduallyusedinaerogeophysicaldetection.Itisinevitabletointroducemagneticinterferenceoftheairplanewhiledetectingthegeomagneticsignalonafixed-wingUAVmountedmagnetometer.Someinterferenceisrelatedtoaircraftmaneuver,whilesomeisirrelevant.Magneticcompensationistoremovetheaircraftmagneticinterferencerelatedtoaircraftmaneuver.Intheclassicmodel,TOLLES-LAWSON’sequation,theinterferencerelatedtomaneuverincludesresidualfield,inducedfieldandeddy-currentfield.Forfixed-wingUAVs,theeddy-currentfieldcouldbeignored,andtheothertwoparts,residualfieldandinducedfield,couldbereferredtoasthesteady-stateinterferencefield.Thispaperanalyzesthesourceandcharacteristicsofaircraftmagneticinterference.Therearesomeadditionalproofsbygroundexperimentstoverifythenatureofferromagneticmaterial.Furthermore,itwouldguidetheaeromagnetometerinstallationthroughmeasuringthedistributionofaircraftmagneticinterference.ConsideringthatthereareobviousdifferencesinthestructureandmaterialsbetweenUAVsandmannedaircrafts,whentheclassicmodelisappliedtomagneticcompensationofafixed-wingUAVaeromagneticdetectionsystem,it’snecessarytohaveanin-depthunderstandingofthephysicalmeaningandpreconditionaboutthemodel,andthisisthestartingpointfortheworkinthearticle.
magneticcompensation;fixed-wingUAV;aeromagneticdetectionsystem;aircraftmagneticinterference;residualmagnetization;inducedmagnetization
2015-11-10;Revised2015-12-08;Accepted2016-03-01;Publishedonline2016-03-111503
URL:www.cnki.net/kcms/detail/11.1929.V.20160311.1503.002.html
s:DeepExplorationinChina,SinoProbe-09-03(201011080);R&DofKeyInstrumentsandTechnologiesforDeepResourcesProspecting(theNationalR&DProjectsforKeyScientificInstruments) (ZDYZ2012-1-0203)
2015-11-10;退修日期2015-12-08;录用日期2016-03-01; < class="emphasis_bold">网络出版时间
时间:2016-03-111503
www.cnki.net/kcms/detail/11.1929.V.20160311.1503.002.html
国家深部探测技术与实验研究专项SinoProbe-09-03(201011080); 国家重大科研装备研制项目“深部资源探测核心装备研发”(ZDYZ2012-1-0203)
*
.Tel.:010-64889206E-mailguozq@radi.ac.cn
王婕, 郭子祺, 刘建英. 固定翼无人机航磁探测系统的磁补偿模型分析J. 航空学报,2016,37(11):3435-3443.WANGJ,GUOZQ,LIUJY.Analysisonmagneticcompensationmodeloffixed-wingUAVaeromagneticdetectionsystemJ.ActaAeronauticaetAstronauticaSinica,2016,37(11):3435-3443.
http://hkxb.buaa.edu.cnhkxb@buaa.edu.cn
10.7527/S1000-6893.2016.0059
V248.1; P631.2+22
A
1000-6893(2016)11-3435-09