基于PSO的6R装配机器人手臂刚度优化
2016-11-05史旭东庄立东郭显鹏
史旭东,庄立东,郭显鹏
(1.南京工程学院 机械工程学院,南京 211167;2.江苏理工学院 机械工程学院, 江苏 常州 213000;3.康尼机电股份有限公司 技术中心,南京 210013)
基于PSO的6R装配机器人手臂刚度优化
史旭东1,3,庄立东2,郭显鹏3
(1.南京工程学院 机械工程学院,南京 211167;2.江苏理工学院 机械工程学院, 江苏 常州 213000;3.康尼机电股份有限公司 技术中心,南京 210013)
为了提高6R装配机器人的末端定位精度,从提高其刚度性能出发,提出一种基于PSO的机器人臂长组优化算法。首先,在装配机器人的静刚度模型基础上,提出末端刚度矩阵的“力-线位移矩阵”在手臂工作空间内奇异值的积分均值作为机器人末端刚度的定量评价指标,并以其为优化目标,建立机器人臂长组分配优化函数,研究利用PSO寻优算法对该优化函数求解;最后对某公司自主开发的KRT20-1540 装配机器人,利用ANASYS仿真,验证了该方法的可行性。
6R装配机器人;工作臂;刚度优化
0 引言
自上世纪80年代起,随着机器人工业化进程的推进,工业机器人以其高精度、高适应性,已从汽车领域被推广到各行各业当中。6R装配机器人即具有6个关节自由度的工业机器人,与一般的工业机器人相比,装配机器人具有柔顺性好、精度高、能配套使用等特点,是现代自动化装配生产线不可或缺的一个重要单元[1-2]。
从传统的机器人静刚度模型分析可知,机器人末端刚度可通过机器人雅可比矩阵及关节刚度矩阵表述,而雅可比矩阵又与工业机器人的工作位姿和工作臂长密切关联,因此若要提高工业机器人的刚度,一般常用的方法可采取提高关节刚度,如增加轴承、减速器、同步带的刚度或者改变机器人的运动轨迹,寻找最佳的工作位姿和工作臂长以达到增加末端刚度的目的。由于轴承、减速器、同步带的刚度影响因素基本是固定的,因此现阶段国内外学者研究方向主要集中在研究机器人工作位姿与末端刚度的关系[3],而从臂长优化角度研究机器人的刚度目前还不多。本文从优化装配机器人的工作臂长分配来考虑,利用PSO寻优算法,提出一种新的6R工业装配机器人臂长优化方法。
1 6R装配机器人刚度定量分析模型
1.1 工作臂静刚度模型
本文以某公司自主研发的20KG级工业装配机器人(KRT20-1540)为优化对象,其结构如图1主要包括腰部、肘部、大臂、小臂及末端执行器等几个部件,其中大臂和小臂是承载工作负载及转矩的主要柔性连杆,大臂和小臂的刚度性能直接关系到机器人末端的定位精度。
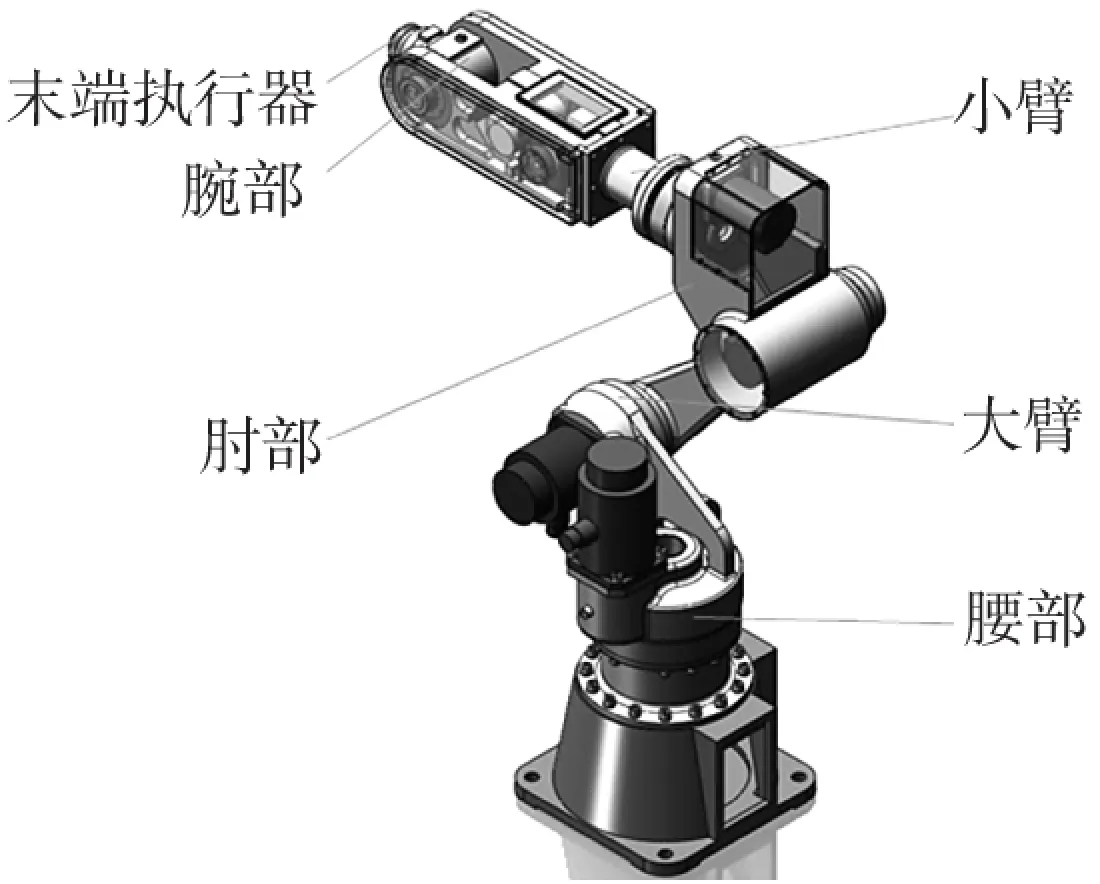
图1 KRT20-1540 结构模型
依据D-H方法建立机器人连杆坐标系,如图2,并确定建立装配机器人齐次坐标矩阵的各关节连杆参数如表1所示。
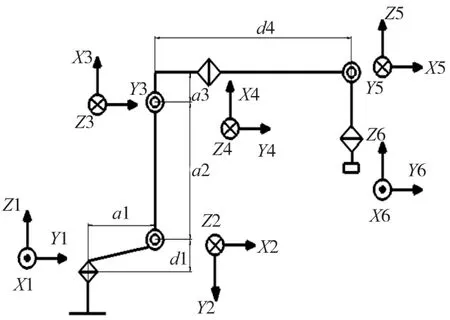
图2 KRT20-1540连杆坐标系
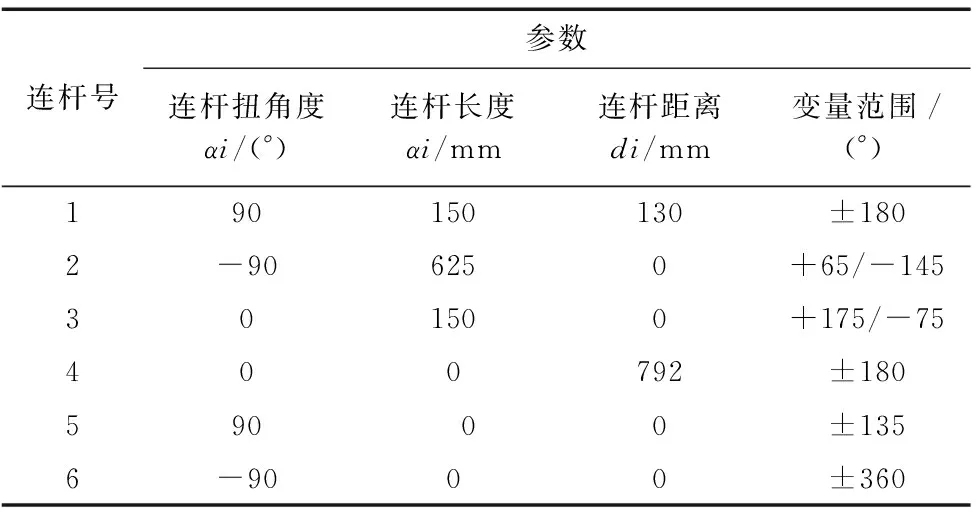
连杆号参数连杆扭角度αi/(°)连杆长度αi/mm连杆距离di/mm变量范围/(°)190150130±1802-906250+65/-145301500+175/-75400792±180590 00±1356-9000±360
由于雅可比矩阵描述的是手臂线位移与角位移的映射关系,即
dx= J·dθ
(1)
式中: dx—关节微小线位移 ;
dθ—关节微小角位移。
根据表1中所列D-H连杆参数,利用微分变换的方法即可求得装配机器人的雅可比矩阵 J[4]。
为了求解装配机器人的静刚度模型,还需对装配机器人各关节刚度Kti(i表示所对应的关节序号)进行分析,求得其关节刚度矩阵Kt,则
Kt=diag(Kt1,Kt2,…,Kt6)
(2)
由于装配机器人各关节刚度为定值,可根据装配机器人传动结构及各主要零部件的扭转刚度的经验公式进行推导,Kt与电机扭转刚度kd和齿轮扭转刚度有关,其中:
(1)电机的扭转刚度为[5]:
kd= 4π2t2·J
(3)
式中:t为机械时间常数;J为电机转子的转动惯量。
(2)齿轮的扭转刚度计算[6]:
kc=Cgbr2
(4)
式中:b为齿宽;r为齿轮半径;对钢材Cg=1.34×1010 N/m2
装配机器人末端刚度矩阵Q为:
Q=J-T KtJ-1
(5)
此即该装配机器人的静刚度模型[7]。由式(2)可知,装配机器人的末端刚度与关节刚度矩阵和雅可比矩阵有关,而关节刚度为定值,则最终影响到机器人末端刚度的主要因素为装配机器人雅可比矩阵。由前式(1)分析,雅可比矩阵 J描述的是机器人工作臂线位移和角位移的映射关系,线位移和角位移又与装配机器人的工作位姿和工作臂长密切相关,因此本文着重研究的是KRT20-1540装配机器人工作臂空间运动中臂长的最优解。
1.2 机器人末端刚度定量分析
上文分析了装配机器人的静刚度模型,但由于静刚度模型只能定性的描述装配机器人末端刚度的影响因素,并不能对装配机器人末端刚度进行直观的评价,为此还需提出一种对装配机器人刚度定量评价的方法。
可将装配机器人抵抗外力变形的能力定义为该装配机器人的末端刚度。按照胡克定律,则装配机器人空间受力F和变形D表示为:
F=Q·D
(6)
而按照量纲的不同,可将静刚度矩阵Q划分为4块,即:
Q=KfdKndKfqKnq
(7)
其中: Kfd为力-线位移矩阵;Knd为力矩-线位移矩阵;Kfq为力-角位移矩阵;Knq为力矩-角位移矩阵。
为此可将式(6)分解为:
dq=KfdKndKfqKnqfn
(8)
式中:f为末端力矢量;n为末端力矩矢量;d为末端线位移;q为末端角位移。
考虑到装配机器人在装配作业中定位及压紧的受力方式,可从力-线位移刚度矩阵角度来衡量机器人的末端刚度。由文献[8],可选“力-线刚度椭球 ”最小半轴长即 Kfd的最小奇异值ξ作为衡量装配机器人刚度性能的指标,ξ值越大,则相应的装配机器人刚度性能越好,然而根据雅可比矩阵的特性,ξ只能描述装配机器人在某特定工作位姿下的刚度性能,因此还需进一步分析其综合刚度 Σζ,参照文献[9],对Kfd的奇异值ξ在整个机器人工作空间内进行积分并求出其平均值Σζ,即:
(9)
式中:W为机器人可达空间;φ为机器人关节空间;θi为机器人关节角(i=1、2、3,…,n)。
因此,最终可用 Σζ 来描述装配机器人整体刚度性能的好坏, Σζ 越大,则末端刚度越大,优化模型以求解 Σζ的最大值建立目标优化函数。
2 刚度优化
2.1 优化模型的建立
对于本次设计优化的6R装配机器人,由于机器人后3个自由度主要集中在小臂旋转及腕部定位,其对机器人整体的空间刚度影响较小,因而可将该机器人的刚度问题进行简化处理,分析装配机器人大臂、小臂在满足工作半径前提下的最优臂长分配。此时问题就转换为单目标多元函数在既定约束条件下最优解的数学问题。该优化模型可描述为:
maxΣζ st.Limin ≤Li≤LimaxL1+L2+…+Ln=L
(10)
2.2 PSO粒子群优化算法
粒子群优化算法(Particle Swarm Optimization,PSO)是1995年由艾伯哈特(Eberhart)和肯尼迪(kennedy)2位学者通过研究鸟群捕食行为所提出的一种新的进化算法。PSO算法的基本原理是利用群体中的个体对信息的共享使整个群体的运动在问题求解空间中产生从无序到有序的演化过程,从而获得最优解,但与遗传算法相比,其迭代公式更加简单,且具有高鲁棒性、高收敛速度的优点,使其在工业设计中展现出非常高的应用价值,并得到学术界的广泛重视[10]。
对本文6R装配机器人手臂刚度优化设计,定义手臂Li(i=1、2、3…n)的解为空间搜索粒子,这群随机搜索粒子在空间中按速度v进行随机飞行搜索,在搜索过程中不断比较粒子当前位置与本身最好位置以及整个粒子群中所发现的最后位置,并根据式(10)中确定的适应度值f以及利用式(11)进行迭代计算:
vik+1=ωvik+c1 μ pik-xik+c2 η[ pgk-xik]
xik+1= xik+vik
(11)
其中:ω为惯性权重;c1 、c2为粒子学习因子;μ、η为在[0,1]之间的均匀分布的伪随机数; xi为粒子当前位置; vi为该粒子当前速度;pi为该粒子最好位置; pg为群体内所有粒子最好位置。经过迭代,最终可求出装配机器人Li的最优解组合。
3 应用实例
3.1 机器人关节刚度计算
本次KRT20-1540装配机器人主要从优化机器人工作臂长的角度来提高其末端刚度,为了方便计算,将后3个自由度简化,与小臂扭转关节合并,其传动链及传动原理如下表2和图3所示。
表2 各关节的传动路线
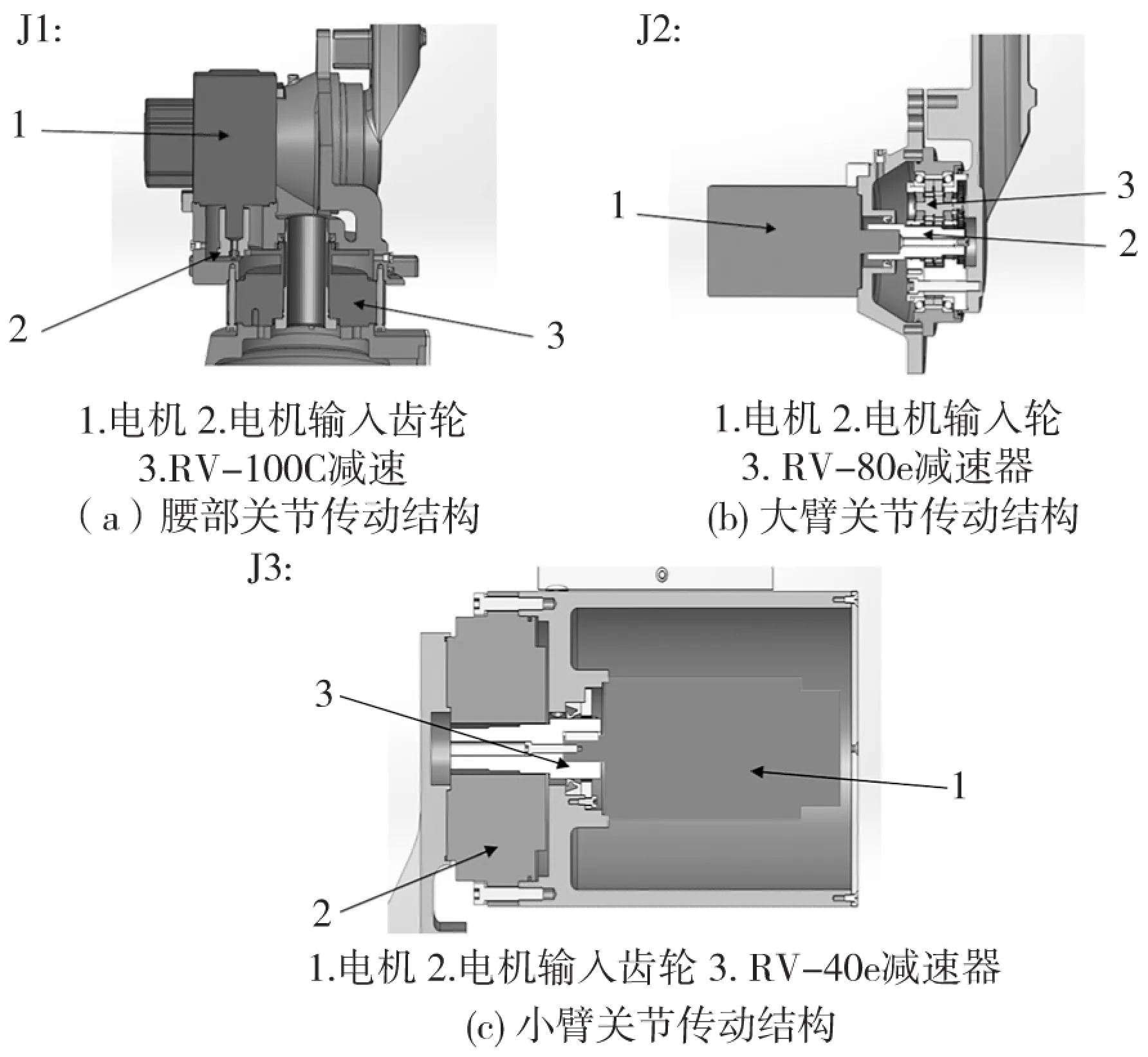
图3 传动关节结构图
J1腰部回转关节选用的是日本山洋R2AA13200DCPW0交流伺服电机,该电机的扭转刚度kd可按式计算,从山洋伺服电机样本中可查得t=0.83 ms,J=12.2×104N·mm ,由式(3)最终得电机扭转刚度kd1=5.81×108N·mm/rad ;电机输入齿轮的齿宽b=20mm,齿宽半径r=18mm ,由式(4)可得其扭转刚度kc1=8.68×104N·mm/rad;J1关节中减速器选用的是日本帝人RV-100C-36,该减速器的扭转刚度kr可从帝人减速器样本中查得,kr1=3.06×107N·mm/rad
为了计算J1关节的总刚度,还需把传动系统中各机械部件的刚度一一折算到输出轴上,计算等效刚度。在此,为了简化计算,可将传动系统各部件简化成由几个弹性部件串联组成的系统,并按折算前后系统动能或势能保持不变的原则进行折算。折算后电机等效刚度kd1′=kd1·i2,齿轮等效刚度为kc1′=kc1·i2 ,RV减速器的等效刚度为kr1′=kr1,其中i为RV减速器的减速比,则J1关节综合扭转刚度k1为:
1k1=1kd1′+1kc1′+1kr1′
(12)
最终计算得腰部回转关节扭转刚度k1=7.06×107 N·mm/rad,同样的方法可求得k2= 6.23×108N·mm/rad;k3=3.12×107 N·mm/rad ;Kt=diag(7.06×107, 6.23×108,7.23×107)
3.2 机器人臂长优化
根据上文的分析,KRT20-1540装配机器人在对工作臂进行优化设计时为了方便计算,将后3个自由度简化,故其雅克比矩阵Jk较传统6R机器人有所不同,可令:
Jk=[ J1, J2 ,J3,J4]
(13)
其中 :
J1=d4s23-a2c2-a3c23a2c1+a3c13-
d4s23a2c2-a3c23-d4s231
J2=a3c6 -d4c4-a2a3 -d4c4+a2a2-a3-d41
J3=d4+a3d4-a3d4c4+a20
J4= 0001
式中:c1=cosθ1,s1=sinθ1,s23=sin(θ2+θ3)并依此类推,将表1中KRT20-1540装配机器人的D-H连杆参数带入,结合式(5)、 (8)最终可解得本机器人“力-线位移矩阵”
Kfd=-L1sinθ2-L2sin(θ2+θ3-L2sin(θ2+θ300L1cos(θ2)+
L2cos((θ2+θ3)L2cos((θ2+θ3)0000-101101
(14)
式中:L1为大臂臂长;L2为小臂臂长;θ2、θ3为大臂、小臂工作转角。由于受到工作范围的限制,故大臂、小臂关节角的约束条件设定为θ2∈[ 1.13,-2.53 ],θ3∈[ 3.05,-1.31](单位弧度),同时还需保证KRT20-1540装配机器人的最大工作半径为1540,故该优化模型可表示为:
maxΣζ (L1,L2)st.θ2∈ [ 1.13,-2.53 ]
θ3∈[ 3.05,-1.31 ]L1+L2=1540
(15)
该优化问题可利用PSO粒子群算法求解。在此借助Matlab粒子群工具箱(PSOt),并指定惯性因子、约定各维变量的取值范围等即可,其具体的调用函数为:
pso_Trelea_vectorized(functname, D, mv, VarRange , minmax, PSOparams, plotfcn, PSOseedValue)
其中,对于本次优化问题,其调用函数为:
test_func = max Σζ (L1,L2)
L1_range=[-2,2];
L2_range=[-2,2];
range=[L1_range; L2_range];
Max_V=0.2* (range(:,2) - range(:,1));(最大速度取范围的 10%~ 20%)
n=2(粒子维数 )
PSOparams = [10 1000 50 2 2 0.9 0.4 1500 1e-25 250 NaN 0 0] (个体数目 50 ,进化次数1000)
PSO_Trelea_vectorized('test_func',n, Max_V, range, 1, PSOparams)
最终解得最优臂长解为L1*= 625.6, L2*= 792.8,具体设计时取整L1*= 626,L2*=793。
3.3 优化结果验证
本次优化设计的装配机器人KRT20-1540,其负载为20kg,在ANASYS仿真软件中将其模型简化并在末端施加200N的作用力,规定好约束并对整个模型网格划分后进行应力应变分析;同时给出另外2组臂杆长度在相同位姿下与优化臂长组对比其应力应变量,仿真结果如图4。
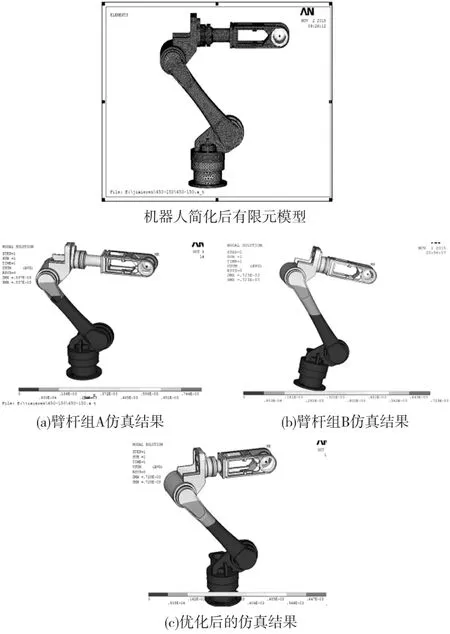
图4 臂杆优化仿真对比
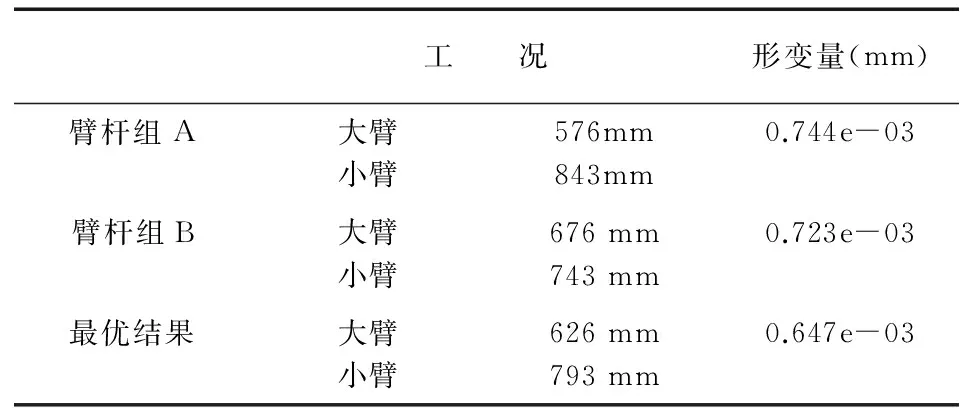
工 况形变量(mm)臂杆组A大臂小臂576mm843mm0.744e-03臂杆组B大臂小臂676mm743mm0.723e-03最优结果大臂小臂626mm793mm0.647e-03
由上表4仿真结果可知,该优化方法是切实可行的。
4 结束语
本文以某公司自主研发的6R装配机器人为例,研究分析了其刚度模型,并提出了基于PSO的机器人工作臂长组优化,为提高机器人末端刚度提出了一种新的思路。
本文静刚度模型中以“力-线位移矩阵”奇异值在工作空间内的积分均值作为定量分析指标,简化分析了后3个自由度对刚度的影响,后期考虑到优化模型的精确性,在计算刚度模型时可将其带入计算;同时,机器人的工作位姿也是决定末端刚度性能的一个重要影响因素,空间积分均值并不能完全表达,因此有必要进一步探讨位姿与工作臂长相结合的刚度优化方法,对提高机器人精度具有更加重大的意义。
[1] 骆敏舟,方健,赵江海. 工业机器人的技术发展及其应用[J]. 机械制造与自动化,2015(10):1-4.
[2] 董欣胜,张传思,李新. 装配机器人的现状与发展趋势[J]. 组合机床与自动化技术,2007(8):1-4.
[3] Wang M X. 机器人技术基础[M]. 武汉:华中科技大学出版社,1996.
[4] 闻邦椿. 机械设计手册 [M]. 北京:机械工业出版社,2010.
[5] 林义忠,廖小平,曾剑. 6R喷涂机器人操作臂末端刚度分析 [J]. 广西大学学报:自然科学版,2011,36(2):234-240.
[6] John J Cring.机器人学导论[M].贠超,译.北京:机械工业出版社,2012.
[7] Abele E,Weigold M ,Rothenbucher S. Modeling and indentification of a industrial robot for machining application. Annals of the CIRP,2007,56(1):387-390.
[8] 曲巍崴,侯鹏辉,杨根军.机器人加工系统刚度性能优化研究[J].航空学报,2013,34(12):2823-2823.
[9] Gosselin C,Angeles J.A global performance index for the kinematic optimization of robotic mainpulators[J].ASME Journal of Mechanical Design,1991,11(3):220-260.
[10] Blum C, Merkle D.群智能(精)[M]. 龙飞,译.北京:国防工业出版社,2011.
(编辑 李秀敏)
Arm Stiffness Optimization of a 6-DOF Assembly Robot Based on PSO
SHI Xu-dong1,3,ZHUANG Li-dong2,GUO Xian-peng3
(1.School of Mechanical Engineering,Nanjing Institute of Technology,Nanjing 211167,China; 2.School of Mechanical Engineering, Jiangsu Institute of Technology,Changzhou Jiangsu 213000,China)
To increase the repeat location accuracy of a 6-dof assembly robot , a method of optimization of its link length is proposed based on PSO through improving the stiffness performance. The integral mean value of singular-value of force-displacement matrix on link work space is used as the quantitative index to measure the link stiffness. With the aim of its optimization, the optimization function of link length is set up and solved based on PSO. Finally, on the company independently developed KRT20-1540 assembly robot, the feasibility of the method is verified through ANASYS simulation.
6-dof assembly robot;link length; stiffness optimization
1001-2265(2016)10-0043-04
10.13462/j.cnki.mmtamt.2016.10.011
2015-11-10;
2015-12-15
史旭东(1968—),男,江苏溧阳人,南京工程学院高级工程师,研究方向为机械加工工艺与自动化设备,(E-mail)shixudong@live.cn。
TH166;TG659
A