基于自回归与最小均方理论的振动环境下光纤陀螺仪滤波方法
2016-11-03黄继勋王颂邦
张 峰,黄继勋,王颂邦
(北京航天时代光电科技有限公司,北京100094)
基于自回归与最小均方理论的振动环境下光纤陀螺仪滤波方法
张峰,黄继勋,王颂邦
(北京航天时代光电科技有限公司,北京100094)
针对振动应力下光纤陀螺产生测量误差增大的问题,从振动对光纤环的影响机理出发,分析了振动应力下光纤陀螺干涉信号的表现形式,提出了基于自回归最小均方滤波理论的光纤陀螺滤波方法,将AR模型的平稳性和最小均方根滤波的自适应性相结合,提取平稳数据的特性参数,对高频信号进行滤波,降低非互易相移产生陀螺角速度误差值的干扰。试验表明,该方法简单可行,有效地降低了振动应力下光纤陀螺输出信息的噪声,抑制了由振动引起的陀螺漂移。
振动;光纤陀螺;自回归;最小均方
0 引言
振动应力对光纤陀螺的影响主要表现为振动应力对光纤陀螺光路部分的影响[1],试验表明振动应力对光路部分的影响主要表现在对光纤环的影响,表现为引起光纤长度、折射率和损耗的改变而产生测量误差。目前,针对光纤陀螺易受振动应力的影响,主要采取的方法有加装减震器和对光纤环固胶。文献[2]提出加装减震装置来隔离环境振动对光纤陀螺的影响,但光纤陀螺作为实时敏感姿态的核心部件,需要与载体进行刚性连接,以确保测量的实时性,加装减震装置,会使其变为弹性连接,导致测量的实时性受到影响。文献[3]则采用固胶的方式,对胶体的热胀冷缩的温度特性和弹性模量要求较高,会导致光纤环产生附加应力影响陀螺仪输出性能。文献[4]~文献[6]提出的光纤环的四极对称绕法严格保证关于光纤长度中点对称的点要处于相同位置,使其所受振动影响相同,就能抑制振动误差,但实际操作非常困难,目前陀螺仪使用的光纤环长度少则几百米多则几千米,无法严格使对称位置的光纤处于相同位置。针对上述文献不足,本文提出了光纤陀螺自回归最小均方滤波技术,通过数学滤波算法,降低非互易相移产生陀螺角速度误差值的干扰,抑制了由振动引起的陀螺漂移,提高陀螺仪抗振性能。
1 振动对光纤陀螺的影响
1.1振动应力对光纤环影响
振动应力对光纤环的作用可分为轴向应力与横向应力[7-9]。轴向应力能导致光纤长度的变化;横向应力一方面导致光纤的微弯损耗,另一方面可以引起偏振态的变化。
干涉式数字闭环光纤陀螺中反向传播的两束光分别从各自入射端同时入射光纤后,经过光纤环中同一点的时间不同,即光程差不同,如图1所示。

图1 两束光到达同一点所经历的光程Fig.1 The light path that reached by two beams of light
由图1分别得到正反两束光在振动情况下经过M点附近的微小长度Δl时产生的附加相移,如式(1)所示。

式中,F为所受的应力;φv0为应力变化的初始相位;K为比例系数。
K可由下列公式计算得出:

式中,L为光纤环长度;P11、P12为光纤材料的弹光系数;n为光纤材料的折射率;μ为波导的泊松比;E为波导的杨氏弹性模量;λ为光波波长。
对于石英,有:n=1.456;P11=0.121;P12= 0.270;E=7×1010Pa;μ=0.17。
两束光都经过M点后,由振动带来的非互易相移为:

1.2振动对与光纤环敏感轴平行方向的影响
在振动应力下,光纤环水平放置,光纤环敏感轴与振动方向平行,光纤环圆周各部分受到的应力相同,如图2所示。

图2 光纤环水平面各部分受到的应力示意图Fig.2 The strain distribution of horizon parts of fiber coil
在光纤环圆周上各个位置处的光纤所受的应力与光纤在圆周上所处的位置无关,可近似认为大小相等。设在振动条件下,光纤环所受的应力fi为:

式中,F为光纤环所受应力的幅值;ω为应力变化的频率,即振动频率;φv0为应力变化的初始相角。
从光纤两端同时入射的两束光到达M点时,分别经历了l和L-l的光程,对式(4)在整个光纤长度L上进行积分,可得到与振动方向平行轴光纤环中由振动引起的非互易相移Φh_error为:
1.3振动对与光纤环敏感轴垂直方向的影响
对于振动方向与光纤环敏感轴垂直方向来说,受力分布如图3所示。

图3 光纤环垂直面各部分受到的应力示意图Fig.3 The strain distribution of vertical parts of fiber coil
图3中,R为光纤环半径;l为受力点距离光纤某一端口的距离;fh为光纤所受的横向应力。
当光纤陀螺受到振动时,设其所受到的应力关系为:

则由振动引起的非互易相移为:

对式(6)在整个光纤长度L上进行积分,得到与振动方向垂直轴光纤环中由振动引起的非互易相移Φv_error为:

1.4振动引起的角速度误差
由上述相位差的变化引起角速度误差计算如下:

为了降低非互易相移产生陀螺角速度误差值的干扰,提高陀螺仪抗振性能,本文对光纤陀螺进行了数字滤波,提出了自回归最小均方算法(LMS)滤波算法。
2 最小均方(LMS)自适应滤波
LMS算法是一种自适应滤波算法,它的理论基础是最陡下降法[10-11]。LMS算法的主要特点是能自适应调整滤波系数,从而更好地滤除噪声[12-14]。算法的原理,如图4所示。

图4 LMS算法原理框图Fig.4 Block diagram of LMS algorithm principle
其中,参考信号为d(n),输出信号为y(n),将参考信号d(n)与输入信号x(n)进行比较,形成误差信号e(n)。设滤波系数为ω(n),则误差信号可以表为:

定义f(ω)为均方误差性能函数,f(ω)表达式如下:

根据最陡下降法,n+1时刻的滤波系数ω(n+1)可以用简单递归关系来计算:

式中,u是一个正实数,通常称为自适应收敛系数或步长,Δ(n)为梯度矢量,可写为:
LMS算法是一种用瞬时值估计梯度矢量的方法,即:

由于瞬时估计梯度矢量的均值EΔ(n)[]等于梯度矢量Δ(n),所以这种瞬时估计是无偏估计,则滤波更新公式为:

LMS算法稳定性的充要条件为:

λmax为输入信号x(n)的自相关矩阵R的最大特征值。
3 AR模型
3.1AR模型介绍
在一定的近似程度上,任何广义平稳随机过程都可以用一阶适当的ARMA(n,m)过程来描述。设有一平稳、正态、零均值的时间序列为则它的ARMA模型有以下形式:

式中,xk为时间序列;φn为模型系数(自回归系数);θm为模型系数(滑动平均系数);ak为残差(白噪声);n、m为ARMA(n,m)模型阶次数;n为时间序列长度。
式(17)表示时间序列xk{}在k时间的取值xk可以用这个时间序列在过去n个时期的观测量xk-1,xk-2,…,xk-n来估计,其误差:

模型参数估计采用长自回归模型法,基于观测时序建立起来的AR模型、MA模型、ARMA模型均为等价的数学模型。因此,可先估计出AR模型,再根据传递函数相等的关系估计出ARMA模型的参数与φn、θm。
3.2建模过程
首先对光纤陀螺的漂移数据进行功率谱估计,用滤波方法消除确定频率分量的噪声,然后进行平稳性检验,在建立光纤陀螺仪的自回归参数模型。取光纤陀螺仪实测一段振动数据进行分析,如图5所示,数据包含振动前、振动中和振动后的数据。

图5 光纤陀螺仪输出Fig.5 The output of the fiber optical gyroscope
对振动前的一段平稳数据进行分析,结果如图6所示。
图6 陀螺仪输出平稳数据的功率谱图Fig.6 The output of the filter based on LMS theory
由图6可知,光纤陀螺漂移的噪声能量比较均匀地分布在频率轴上,仅在低频段能量较大,说明陀螺仪使用了低通滤波,陀螺仪漂移信号接近于白噪声,从方框图分布来看,该陀螺仪的噪声符合高斯分布的白噪声。
3.3AR模型参数估计
本文采用由赤池弘治提出的BIC准则,这一准则是赤池弘治于1976年提出,其准则函数为:其中,p为模型的阶次,N为数据的个数。为模型的残差。各模型的参数如表1所示。
表1 各模型的参数表Table 1 Model parameters
4 基于自回归AR模型的LMS算法
LMS算法实际上是通过将输入信号d(n)与目标参考信号x(n)进行比较,自适应条件滤波系数ω(n),使得输出输出信号y(n)无限逼近目标参考信号x(n),因此,参考信号x(n)结果直接影响了输出信号y(n)的性能和大小。作为一种实时滤波更新算法,参考信号x(n)只能通过先验信息获取或者借助外界信息,本文针对上述问题,采用了自回归理论获取参考信号x(n),提出了基于自回归AR模型的LMS算法。
依据上述各模型参数对应的BIC值,选择4阶AR(4)模型最合适,建立如下方程:

其中,φ1、φ2、φ3、φ4为表1中的参数值。则改进后的LMS算法框图如图7所示。
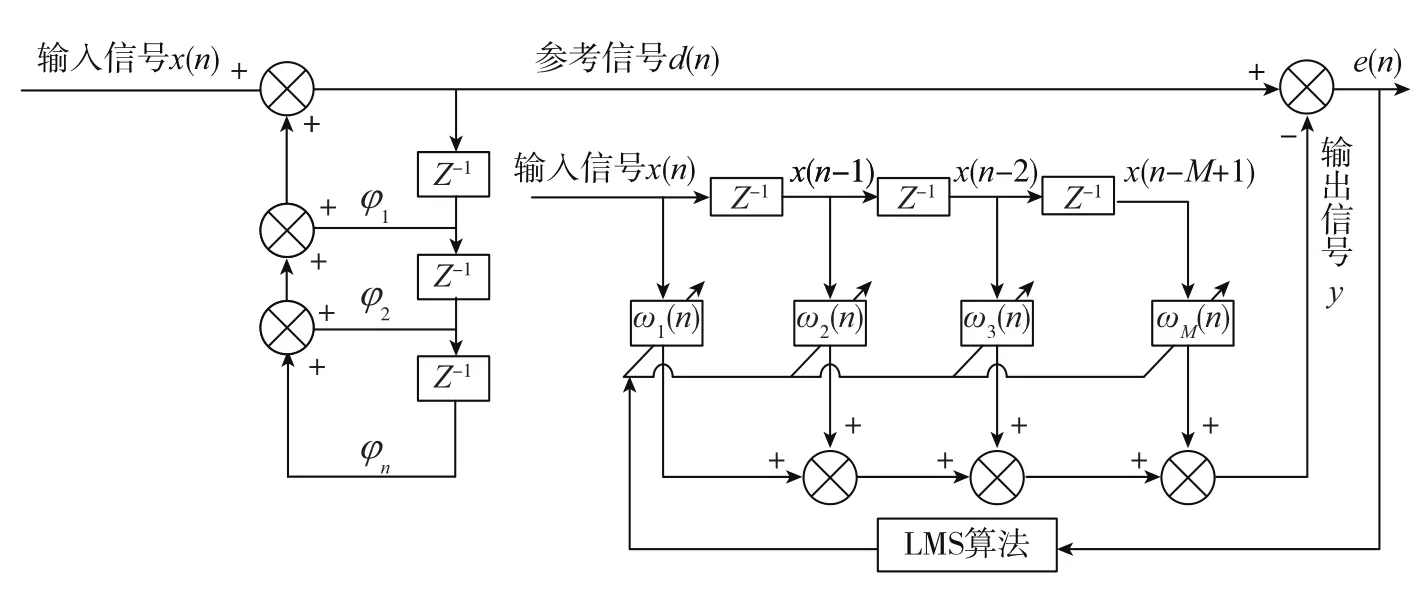
图7 改进LMS算法原理框图Fig.7 Block diagram of improved LMS algorithm principle
算法如下:

分析结果如下:
选择调节参数μ=0.005,经过改进型LMS自适应滤波后输出结果如图8所示。

图8 基于AR和LMS理论的滤波输出Fig.8 The output of the filter based on AR and LMS theory
滤波前后陀螺仪输出均值如表2所示。

表2 滤波前后陀螺仪输出Table 2 The output of gyro before and after filtering
从图8所示结果分析,滤波后的噪声水平比滤波前的噪声水平下降了10倍左右,滤波效果较为明显,对振中零位误差的抑制有一定的作用,采用该滤波方法能够降低噪声水平,有效地抑制振动引起的误差。
对于不同调节参数μ,算法稳定速度不同,分别以μ=0.005,μ=0.01,μ=0.015,μ=0.02四种不同参数值作仿真,结果如图9所示。
仿真过程中,通过改变调节参数μ可以改变稳定时间:当调节参数μ变小时,稳定速度变慢,但稳定后的波动较小,信号的稳定性变好;相反,当调节参数μ变大时,稳定速度变快,但稳定性变差,若μ变得过大,则算法不收敛,容易发散,不能解调出信号。因此,需要根据实际使用情况具体选用参数。

图9 不同调节参数下误差随时间输出Fig.9 The output of error with different parameters
5 结论
本文针对目前在振动环境下,光纤陀螺组合输出噪声较大的问题,提出了一种自回归最小均方自适应滤波方法,该方法是通过构造较为简单的自适应滤波器,滤除高频振动导致的非互易相移信号。通过试验证明了该方法的可行性和有效性,可以在很大程度上抑制振动引起的陀螺仪测量误差,该方法计算简单,为工程化奠定理论基础。
[1]宋凝芳,张春熹,李立京,等.数字闭环光纤陀螺振动误差分析[J].北京航天航空大学学报,2004,30(8): 702-704. SONG Ning-fang,ZHANG Chun-xi,LI Li-jing,et al. Digital FOG vibration error analysis[J].Journal of Beijing University of Aeronautics and Astronautics,2004,30(8): 702-704.
[2]Ohno A,Motohara S,Usul R,et al.Development of fiber optic gyroscope with environmental ruggedness[C].Fiber of the Gyros:15thAnniversary Conference,SPIE,1991,1585:82-88.
[3]孟照魁,邵洪峰,徐宏杰,等.固胶对保偏光纤环的影响[J].北京航空航天大学学报,2006,32(8):958-961. MENG Zhao-kui,SHAO Hong-feng,XU Hong-jie,et al. Influence of polarization maintaining fiber ring[J].Journal of Beijing University of Aeronautics and Astronautics,2006,32(8):958-961.[4]Sawyer J,Ruffin P B,Sung C C.Investigation of the effects oftemporalthermalgradientsinfiberoptic gyroscope sensing coils(part2)[J].Optical Engineering,1997,36(1):29-34.
[5]Lofts C M,Ruffin P B,Parker M D,et al.Investigation of the effects of temporal thermal gradients in fiber optic gyroscope sensing coils[J].Optical Engineering,1995,34(10):2856-2863.
[6]吴衍记,黄显林.机械振动对光纤陀螺的影响及其减小措施[J].红外与激光工程,2008,37(2):363-365. WU Yan-ji,HUANG Xian-lin.Mechanical vibration on fiber optic gyroscope and its mitigation measures[J].Infrared and Laser Engineering,2008,37(2):363-365.
[7]刘淑荣,吴衍记,徐磊.结构谐振对闭环光纤陀螺振动性能的影响[J].红外与激光工程,2008,37(S1):256-259. LIU Shu-rong,WU Yan-ji,XU Lei.Effect of FOG structural resonance of vibration performance[J].Infrared and Laser Engineering,2008,37(S1):256-259.
[8]范崇澄,彭吉虎.导波光学[M].北京:北京理工大学出版社,1988. FAN Chong-cheng,PENG Ji-hu.Edited wave optics[M]. Beijing:Beijing Institute of Technology Press,1988.
[9]吴衍记.闭环光纤陀螺振动特性研究[D].哈尔滨工业大学,2007. WU Yan-ji.FOG vibration characteristic[D].Harbin Institute of Technology,2007.
[10]Sanders G A,Dankwort R C,Kaliszek A W,et al.Vibration error reduction servo for a fiber optic gyroseope[P].US,5926275,1999-6-20.
[11]Strandjord L K,Adams G W,Ang D.System for suppression of relative intensity noise in a fiber optic gyroscope[P].US,6204921B1,2001-5-20.
[12]Chen X Y.Adaptive filtering based on the wavelet transform for FOG on the moving base[J].Lecture Notes in Computer Science,2005,3644:447-455.
[13]Gelfand S B,Wei Y,Krogmeie J V.The stability of variable step-size LMS algorithms[J].IEEE Transactions on Signal Processing(S1053-587X),1999,47(12):3277-3288.
[14]Kwong R H,Johnston E W.A variable step size LMS algorithm[J].IEEE Transactions Signal Processing,1992,40(7):1636-1642.
Study on Self-regress and Least Mean Square Filter of Fiber Optic Gyroscope Based on Vibration Stress
ZHANG Feng,HUANG Ji-xun,WANG Song-bang
(Beijing Aerospace Times Optical-electronic Technology Co.,Ltd.,Beijing 100094)
Aimed at the problem of vibration can cause measure error and make the signal noise increases.From the mechanism of the impact on the light path which caused by vibration,the signal form of the light path under the influence of vibration is analyzed,a principle that could inhibit the light path signal noise base on least mean square filter algorithm,reducing interference from non-reciprocal phase shift gyro angular velocity error value.The simulation shows that the method is effective,by using this method can effectively restrain the error and noise caused by vibration.
vibration;fiber optical gyroscope;auto-regress;least mean square
U666.1
A
1674-5558(2016)02-01173
10.3969/j.issn.1674-5558.2016.05.011
张峰,男,工程师,博士,研究方向为捷联惯导系统技术。
2015-08-02
光纤陀螺姿态测量系统技术(编号:51309030106)
