量子成像关键技术及研究进展
2016-11-03李明飞莫小范张安宁
李明飞,莫小范,张安宁
(1.北京航天控制仪器研究所,北京100039;2.中国航天科技集团量子工程中心,北京100871)
量子成像关键技术及研究进展
李明飞1,2,莫小范1,2,张安宁1,2
(1.北京航天控制仪器研究所,北京100039;2.中国航天科技集团量子工程中心,北京100871)
量子成像从1995年利用纠缠光源实现至今已有20多年的历史。目前,量子成像已经与压缩感知传感、激光雷达、结构光照明等各个领域形成了多学科交叉。本文回顾了量子成像技术的发展历程,列出了量子成像的关键技术及研究进展,展望了量子成像技术的发展趋势。
量子成像;纠缠光源;压缩感知;激光雷达;结构光照明
0 引言
量子成像,亦称“鬼”成像、强度关联成像或符合成像[1-2]。从诞生发展至今,已有20多年的历史,其发展历程按技术路线和研究进展,可划分为三个阶段。
第一阶段:1994年~2002年,纠缠光量子成像理论及实验研究阶段。这一阶段,量子成像经历了从理论提出到实验验证,期间甚至产生学术争论:纠缠光源是实现量子成像的必要条件[3-4]?
第二阶段:2002年~2008年,经典光源量子成像实验研究阶段。这一阶段,关于纠缠光源是否是量子成像的唯一光源问题,答案水落石出。无论是随机扰动的激光光源还是激光入射旋转毛玻璃产生的赝热光源,甚至真正的热光源,在实验上都被证实可以实现量子成像[5-13]。由于热光源相对于当时的纠缠光源亮度高、容易获得且应用范围广,预示着热光量子成像具有潜在实际应用价值和广阔发展前景,并由此引起大批学者的科研兴趣。
第三阶段:2008年~2016年,经典光源量子成像工程化探索阶段。这一阶段,一方面美国麻省理工学院(MIT)教授Shapiro提出了量子成像改进方案,即计算量子成像方案[14]。通过可控、可预置光源技术取代了参考阵列探测器,实现了真正单像素成像功能。另一方面,空间光调制器技术成熟,实验上很快实现了计算量子成像方案,成像速度大幅提升[15-16]。几乎同时,与计算量子成像理论体系等价的单像素相机也被莱斯大学实验证实[17]。自此,对量子成像的工程化探索拉开了帷幕。越来越多的人开始寻找量子成像的应用,从显微成像到遥感成像[18-21],从抗大气湍流到超分辨成像[22-26],从单像素二维成像到三维激光雷达成像[27-32]等技术方案层出不穷,在多个研究方向均出现了大量的科研成果和学术报道。
本文分三部分对量子成像关键技术及研究进展进行阐述。
1 纠缠光量子成像理论及实验研究
1994年,人们在研究纠缠光子特性时,得出了满足纠缠的光子可以实现非定域成像的理论预言[1]。1995年,美国马里兰大学史硕华小组,利用纠缠光子实验上得到了世界上第一张量子成像[2]。因其非定域成像特性和反直觉,杨振宁称其为“鬼”成像。
如图1(a)所示,量子成像原理可简述为:纠缠光子对被分开后,信号光子通过物体,被桶探测器收集;桶探测器没有空间分辨能力,得不到物体的二维像;令闲散光子直接被点探测器在空间上扫描加以探测,在满足图1(b)透镜成像公式位置最终通过光子计数的符合测量可以得到物体的像——美国马里兰大学英文首字母缩写:“UMBC”。整个过程仿佛物体如幽灵出现在闲散光子探测的空间,因采用了光子符合计数,量子成像也被称为符合成像。量子成像具有如下特点:成像对比度100%,可突破经典的衍射极限实现亚波长成像[2];不足之处是:纠缠光源亮度低,纠缠光子对产生效率低、探测效率低、探测环境要求高,实用性受到严重限制。目前最有希望实现的应用是,在环境光噪声可控条件下,实现近距离、静止目标成像、超分辨显微凝视成像,亚波长光刻技术等。

图1 纠缠光源量子成像实验原理图及实验结果Fig.1 The diagram of quantum imaging experiment and its results
2 经典光源量子成像实验研究
2002年~2008年,主要是经典光源量子成像实验研究阶段。2002年,罗切斯特大学的Boyd团队用随机扫描的激光光源首次建立了热光量子成像方案的雏形[4]。实验装置如图2所示,将连续激光束斩波成准脉冲激光,通过随机旋转反射镜改变准脉冲扫描位置实现对物体扫描;透射过物体的总光强被桶探测器收集;另一束参考光直接被CCD相机拍摄。实验物体是罗切斯特大学缩写“UR”;实验证明,通过对CCD相机和桶探测器信号的关联,可得到物体的清晰成像。该实验首次证明了经典光源可实现量子成像。


图2 经典光源量子成像实验装置及实验结果Fig.2 The quantum imaging experiment setup with classical light source and its experimental result
2004年,意大利的Lugiato团队使用热光源和纠缠光源进行了量子成像和量子干涉成像,再次证明热光源完全可以实现量子成像[5]。2004年,上海光机所韩申生团队给出了量子成像等效于无透镜傅立叶变换成像的解释,并指出量子成像可以应用到X射线成像领域[8]。随后,热光量子成像的不同方案的几何解释由北京师范大学的汪凯戈团队提出,同时他们在理论和实验的基础上研究了热光源的亚波长干涉现象[9]。2005年,中科院物理研究所的吴令安小组首次实现了真热光的双光子二阶关联,随后不久实现了真热光双光子干涉和无透镜量子成像实验,得到正立等大的实像[12]。2008年,美国MIT教授Shapiro提出可用高斯态光模型理论来统一解释纠缠光源量子成像和经典光源量子成像[33]。至此,量子成像关于纠缠源唯一性的争论基本水落石出。当然,对量子成像科学意义的研究并未就此停止。
3 经典光源量子成像工程化探索阶段
2008年~2016年,经典光源量子成像工程化探索阶段。期间,学者对量子成像的研究集中在几个关键技术指标:1)量子成像对比度、信噪比;2)量子成像分辨率极限;3)无透镜量子成像,其他波段量子成像;4)量子成像时间及重建算法;5)大气湍流、散射对量子成像的影响等。上述指标都针对量子成像实际应用需求指标相对应。因此说,这一阶段是量子成像实用化研究,工程化探索的重要阶段。
换言之,这一阶段的量子成像方案与研究思路发生了重要的改变,可按两个技术路线来阐述: 1)主动调制发射光场的前调制技术方案;2)接收端调制接收图像的后调制技术方案。
3.1主动调制发射光场的前调制技术方案
2008年,美国MIT教授Shapiro提出计算量子成像的理论,简化了量子成像光路,引发了量子成像开始工程化的探索[14]。2009年,计算量子成像理论首次被以色列科学家在实验上验证,随后在美国物理学会期刊应用物理快报上发表文章,报道了结合压缩感知算法的压缩感知计算量子成像实验,该方法恢复了高信噪比复杂灰度物体图像[15-16]。如图3所示,传统量子成像需要在参考光路上放置CCD相机记录光场强度,计算量子成像可计算并预置光场空间分布,无需参考光路的阵列相机;由于单点的探测器响应速度快,该方案极大地提高了量子成像的采样速度,从而缩短了成像时间。图4(a)、图4(b)为量子成像传统算法的实验结果,图4(c)、图4(d)为压缩感知算法的实验结果。图4说明了在同样的数据条件下,采用压缩感知算法能够恢复更高信噪比。当然,文章未提到压缩感知算法的重建时间长和对硬件要求高的局限。
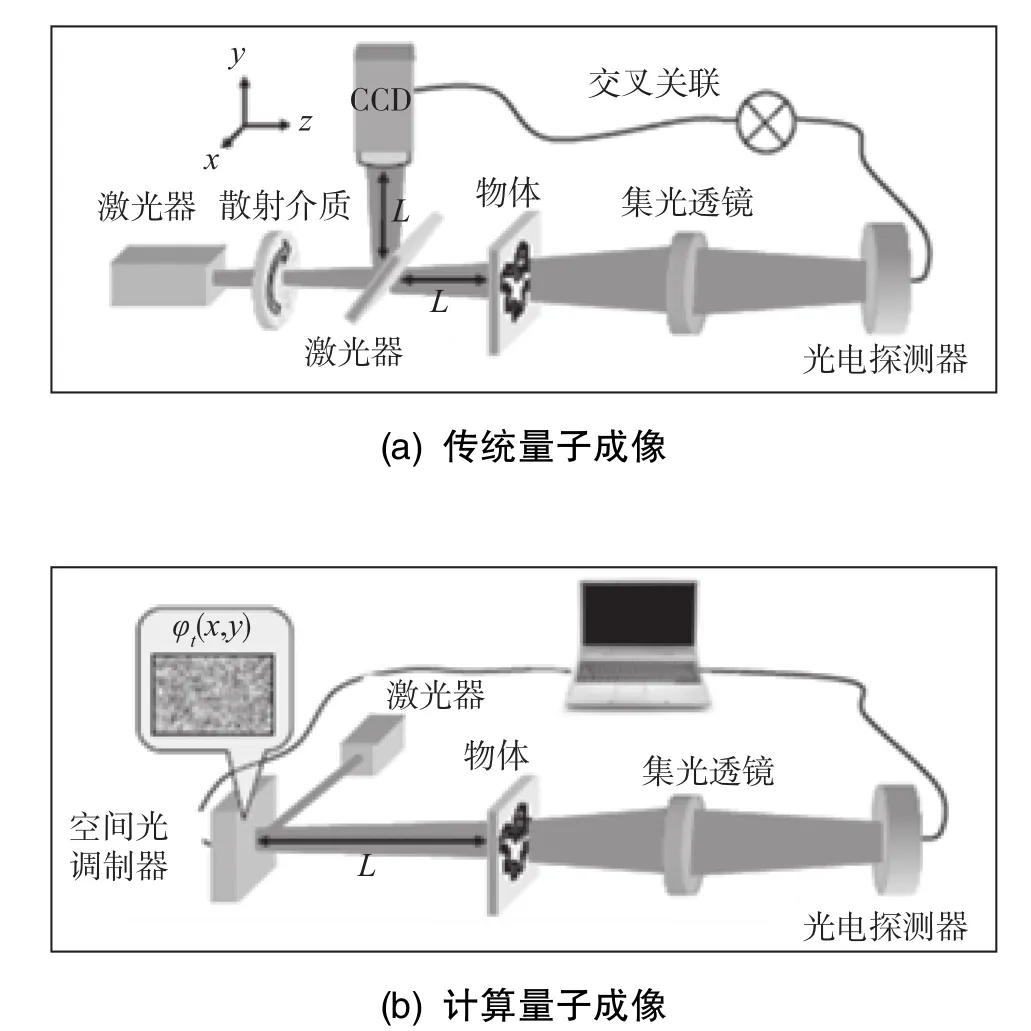
图3 传统量子成像与计算量子成像方案Fig.3 The conventional quantum imaging shceme and the computational quantum imaging shceme
此外,需要指出的是,2010年,差分量子成像方案使得量子成像信噪比有数量级提高,该方法可以得到物体的绝对灰度,很好地重建物体的图像[34]。2012年,中科院物理研究所吴令安小组提出时间对应差分量子成像,该方法不需要关联计算,压缩了成像重建时间[35-36]。对应差分量子成像算法与压缩感知算法恢复的图像信噪比均好于传统成像。差分量子成像的优势是算法简单、鲁棒性强、硬件要求低。实际上,在量子成像实际应用中需要权衡量子成像的数据采集时间和图像重建算法运行时间,理想情况是图像重建算法运行时间小于等于数据采集时间。

图4 量子成像传统算法和压缩感知算法实验结果Fig.4 Computational quantum imaging retrieved by conventional intensity correlation algorithms and by compressive sensing algorithms
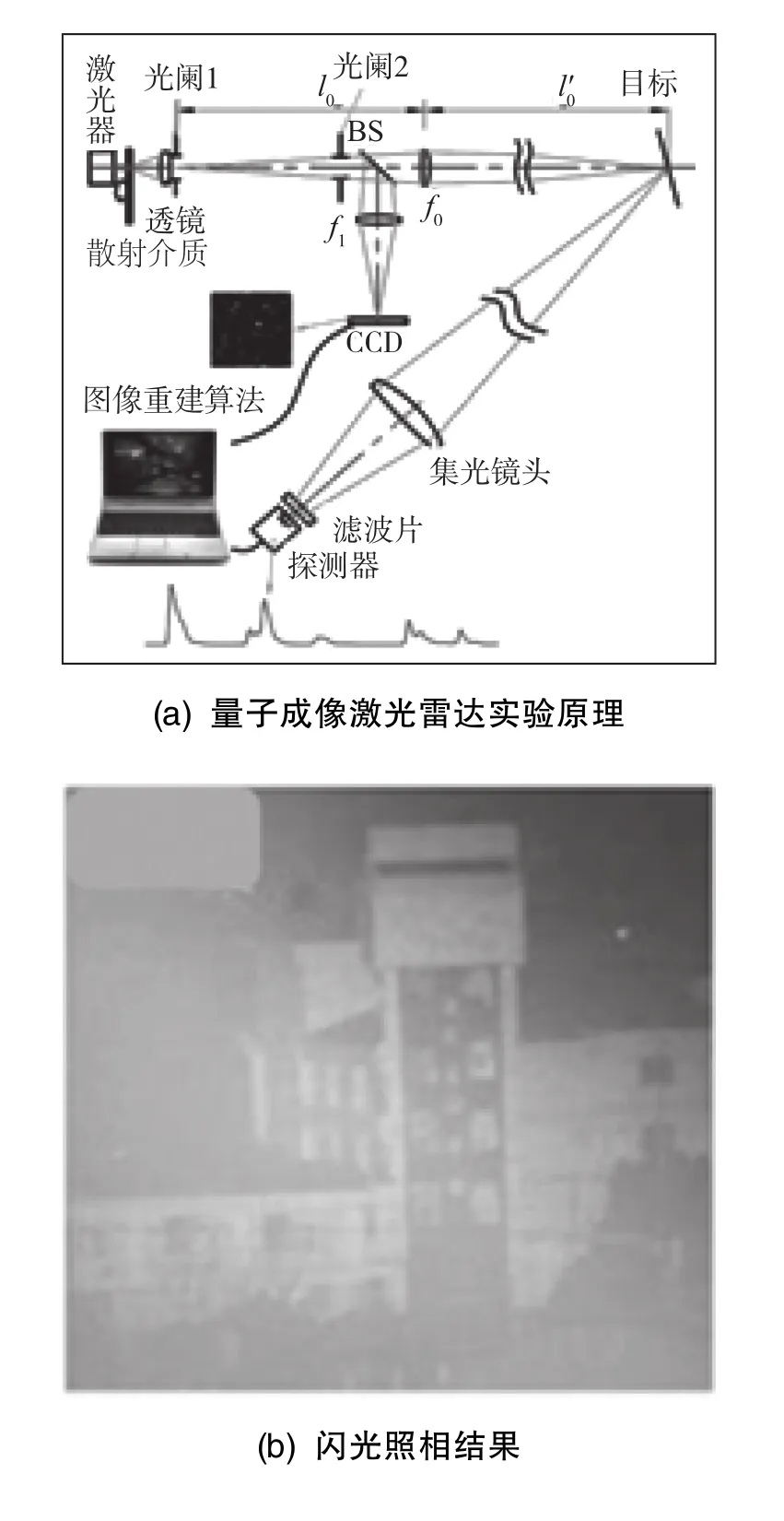
当人们发现量子成像的潜在应用价值后,迅速提出了应用方案,开启了工程化探索。2011年,美国MIT学者提出计算量子成像技术用于遥感成像的方案[37]。2009年,以色列科学家提出计算量子成像可用于激光雷达的方案[15-16]。2012年,上海光机所韩申生团队首次实现了基于稀疏约束的关联成像雷达,成像目标距离900m[28];2013年,利用脉冲激光照明,该团队在世界上首次实现了3D量子成像激光雷达,获得了1.2km自然目标3D成像,随后又开展了全天候成像实验[29]。量子成像激光雷达实验原理如图5(a)所示,脉冲激光光束入射旋转毛玻璃,经分束器分成两束,其中参考光路用CCD相机记录一系列激光散斑场;测量光束经成像镜头投射到目标物体表面,反射光经过窄带滤波后被光电倍增管PMT收集转为光电流;光电流经数据采集卡输入到计算机,运行图像重建算法实现图像的重建。最终,实验实现了横向分辨率25cm、轴向分辨率60cm的自然目标3D成像,成像视场约22m。图像3D重建采用了时间切片技术,将不同时间强度信息切片求和作为相应桶探测器值,分别与参考探测器光场进行关联运算,最终分别恢复出对应距离的图像。实验结果如图5(b)、图5(c)和图5(d)所示。在图5(d)中,上半部分为不同时刻的回波信号;下半部分对应不同时刻回波时间切片重建的3D目标图像[29]。
需要强调的是,上述报道中计算量子成像技术采用可预置调制发射光场技术,无需再采用参考阵列探测器,工程实践上优于传统方案。这一实验的实现开启了联系结构光照明成像和计算量子成像两个研究领域的大门,进一步推动了量子成像技术的工程化进程。
量子成像激光雷达比传统激光雷达有哪些优势?2012年,美国MIT学者专门就这一问题进行了理论分析论证。图6(a)是计算量子成像激光雷达方案,图6(b)为传统激光雷达方案。如果发射和接收端都存在大气湍流和散射,两种雷达方案都不能获得高信噪比成像。量子成像激光雷达优势在于:1)发射端光路不存在大气湍流和散射,但接收端存在,此时量子成像质量优于传统激光雷达。2)量子成像激光雷达只需单像素光电探测器,高性能单像素探测器件相比于阵列探测器制作工艺和技术难度低,容易获得高性能指标,此时量子成像激光雷达表现更出色。3)当组建激光雷达网络时,量子成像激光雷达只需要一个发射照明光源,多个地理位置单像素探测网,实现对目标多角度探测成像。相比于需要多个高分辨传感器阵列的传统激光雷达,前者成本低、传感网络简单。另外,相比于扫描式激光雷达,量子成像激光雷达具有采样次数更少的优势[38]。

图6 计算量子成像激光雷达与传统激光雷达的方案对比Fig.6 Setup for 3D computational quantum imaging in reflection and for conventional 3D imaging lidar
综上,计算量子成像激光雷达方案具有的优势可归纳为以下几点:
1)采样次数突破采样定理,采集速度可更快。由于采用压缩感知的思想,量子成像实际上可以直接采集物体稀疏表象下的信号。2)只利用单像素探测器,成本低。3)组建激光雷达网络,结构简单,复杂度低。
3.2接收端调制接收图像的后调制方案
调制接收图像的后调制方案,首先将目标物体成像到空间光调制器上,调制后由桶探测器接收总光强,最初解算物体灰度图像采用压缩感知理论。压缩感知理论由Candes、Donoho、Tao等于2006年正式提出,压缩感知理论的典型应用之一是莱斯大学所提出的单像素相机方案,2008年莱斯大学先后实现了可见光单像素成像和太赫兹波段单像素成像[17]。2011年,罗切斯特大学首次实现了单像素3D激光雷达,利用单光子探测器可实现距离2.1m,纵向分辨率30cm物体三维图像,无需单光子阵列探测器[31]。2013年,罗切斯特大学进一步发展了单光子计数3D激光雷达,原理如图7所示。该装置光功率为0.5pW(皮瓦)可实现成像,实验表明成像在256×256像素图像实际采样时间低至3s,32×32像素分辨率下视频采集达到14f/s(帧/秒)[39]。图8(a)为经典相机拍摄的图像,图8(b)为单像素相机雷达获得的灰度图像,图8(c)为灰度与距离的融合图像,图8(d)为场景的深度图像。

图7 光子计数单像素相机雷达方案Fig.7 Setup for single pixel 3D imaging lidar

图8 基于光子计数的单像素激光雷达成像结果Fig.8 Experimental results of the single pixel 3D lidar
2012年~2013年,加利福尼亚大学Olivas等从工程化角度深入研究了单像素相机成像信噪比与测量矩阵的关系[32]。实验原理示意图如图9所示,将待测目标图像用佳能相机镜头成像到DMD,光电探测器采集DMD调制信号,信号经A/D转换后在计算机内进行算法重建。
文章研究了三类测量基,即:Noiselet变换基、Hadamard变换基和离散余弦变换基(Discrete Cosine Transform,DCT),各自对应实空间图像如图10所示。Noiselet变换基、Hadamard变换基是二值矩阵,离散余弦变换基具有8比特(bit)灰度。实验中,各组变换基随机选取1%,Noiselet和 Hadamard基占内存大小为250 MB,离散余弦变换基为7.4 GB;各组基数据采集时间和采集占用内存分别为1.4min和163 KB。图11为三类测量基在总像素1%采样下分别得到的结果,所有图像大小均为256×256像素。图11中,上排为彩色融合图像,下排为近红外灰度图像。

图9 单像素相机实验光路示意图Fig.9 Experimental light path of for single pixel camera

图10 三类测量基图像Fig.10 Images of three types of transform base
上述实验的重要结论是:1)单像素相机成像质量可以和经典相机相同,成像速度受限于调制器件。2)单像素相机主要优势在于,只针对某一具体特征的目标成像。
2014年,中科院空间中心翟光杰团队实现了基于互补调制的单像素遥感成像,图像64×64像素,分辨率20cm@2km,未提及成像速度[20]。2014年,英国格拉斯哥大学Padgett团队实现了最高分辨率3μm@128×128像素的可见光和近红外双波段同时成像的单像素显微镜,帧频0.6Hz[18],开启了单像素相机用于显微领域的可能性。实验装置与实验结果如图12所示。
2015年~2016年,笔者所在团队借鉴中科院空间中心翟光杰团队互补调制方案与英国格拉斯哥大学Padgett团队Hadamard变换成像方案,提出了快速Hadamard变换差分探测遥感成像方案,搭建了原理样机,实现了最远17km的自然目标成像。实验装置如图13(a)所示,实验装置尺寸为30cm×30cm×60cm,重量约25kg;如图13(b)所示,光学设计上采用了差分探测的双探测器差分方案,DMD像素1920×1080,调制速度最快为10.7KHz;图13(c)对应成像帧频为10Hz,图像大小32×32像素;图13(d)对应成像帧频为2.5Hz,图像大小64×64像素;图13(e)对应成像帧频为0.6Hz,图像大小128×128像素[21]。上述图像的距离分别为17km、5km和1km左右。研究发现,快速Hadamard变换差分探测遥感成像方案具有抗干扰能力强、成像速度快、对硬件和内存资源要求低的特点,适合进一步工程化研究。

图11 三类测量基在总像素1%采样下分别得到的结果Fig.11 Images recovered by single pixel camera with three types of 1%transformed bases

图12 可见光和近红外双波段单像素显微成像Fig.12 Setup for single pixel microscope imaging with daul band wavelength:visible light and infrared light
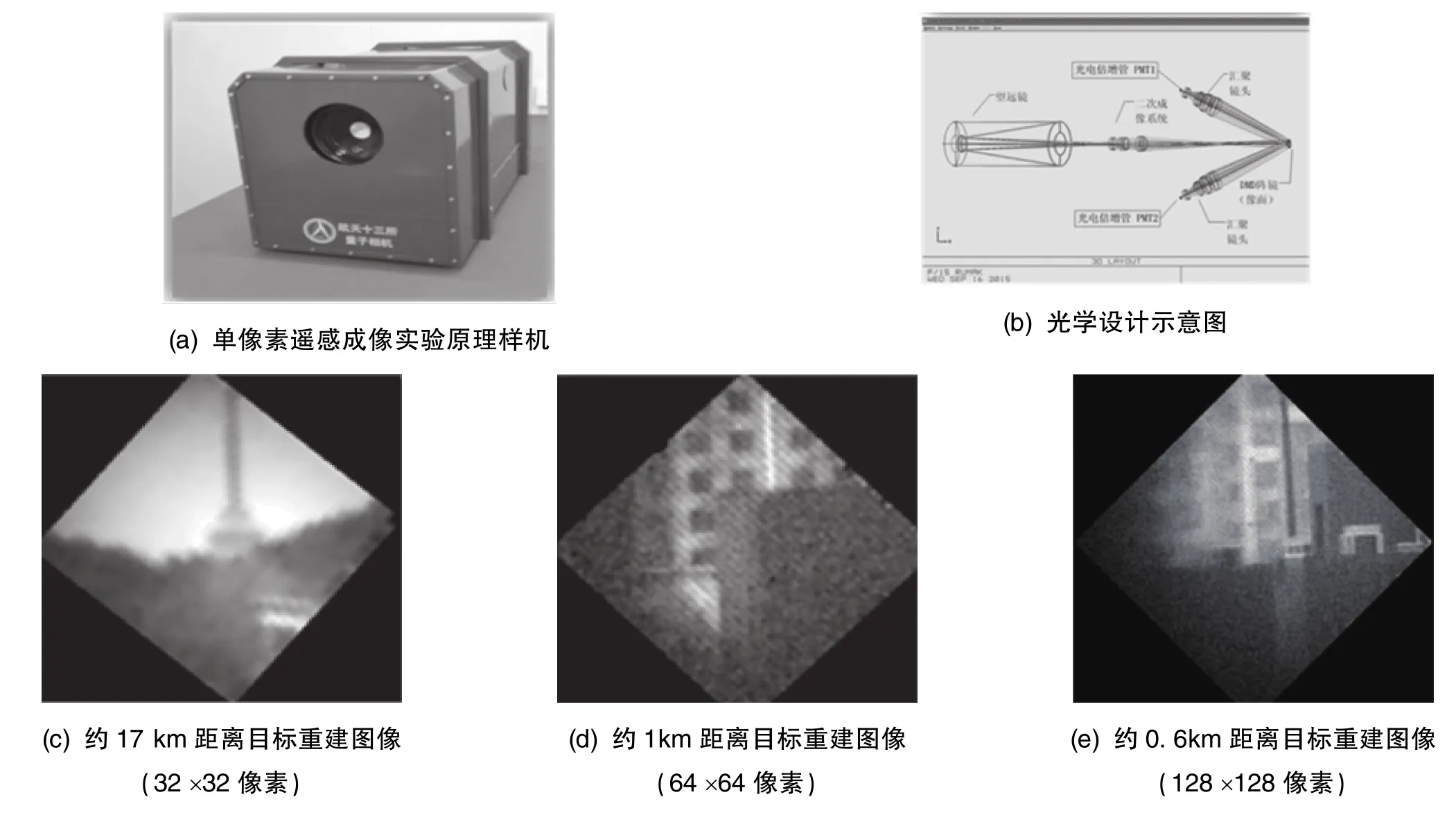
图13 快速Hadamard变换差分探测遥感成像方案及实验结果Fig.13 Fast Hadamard transform differential detection for remote sensing imaging and its experimental result
4 总结与展望
针对诸多量子成像技术方案,可从以下几个角度进行对比总结。
1)纠缠光源量子成像技术,受限于纠缠光源亮度,目前适合在实验室环境应用,具有超分辨显微成像应用潜力。
2)经典光源量子成像技术分为两类技术方案,即主动调制发射光场的前调制技术方案和接收端调制接收图像技术方案。
主动调制发射光场的技术方案潜在发展方向是计算量子成像激光雷达,具有如下优势:①采样次数突破采样定理,数据采集速度快;②利用单像素探测器,成本低;③可组建激光雷达成像网络,结构简单,复杂度低。
接收端调制接收图像技术方案,主要是单像素相机技术方案。单像素相机技术方案同样可以应用于实现单像素3D激光雷达,理论上比传统激光雷达灵敏度更高、成本更低。但无论是单像素相机还是单像素3D激光雷达,相对于传统的阵列相机技术水平,目前制约量子成像工程化应用的最大问题是成像速度与图像信噪比的相互制约,故需要权衡两者,其中针对特定目标实现探测和凝视成像是值得研究的方向。
[1]Klyshko D N.Quantum optics:quantum,classical,and metaphysical aspects[J].Physics-Uspekhi,1994,37(11):1097.
[2]Pittman T B,Shih Y H,Strekalov D V,et al.Optical imaging by means of two-photon quantum entanglement[J]. Physical Review A,1995,52(5):R3429.
[3]Abouraddy A F,Saleh B E A,Sergienko A V,et al.Role of entanglement in two-photon imaging[J].Physical Review Letters,2001,87(12):123602.
[4]Bennink R S,Bentley S J,Boyd R W.“Two-photon”coincidence imaging with a classical source[J].Physical Review Letters,2002,89(11):113601.
[5]Gatti A,Brambilla E,Bache M,et al.Correlated imaging,quantum and classical[J].Physical Review A,2004,70(1):013802.
[6]Bennink R S,Bentley S J,Boyd R W,et al.Quantum and classicalcoincidenceimaging[J].PhysicalReview Letters,2004,92(3):033601.
[7]Gatti A,Brambilla E,Bache M,et al.Ghost imaging withthermal light:comparing entanglement and classicalcorrelation[J].PhysicalReviewLetters,2004,93(9):093602.
[8]Cheng J,Han S S.Incoherent coincidence imaging and its applicability in X-ray diffraction[J].Physical Review Letters,2004,92(9):093903.
[9]Xiong J,Cao D Z,Huang F,et al.Experimental observation of classical subwavelength interference with thermallike light[J].Physics,2004:0410020.
[10]Cao D Z,Xiong J,Wang K.Geometrical optics in correlated imaging systems[J].Physical Review A,2005,71(1):013801.
[11]Cai Y J,Zhu S Y.Ghost imaging with incoherent and partially coherent light radiation[J].Physical Review E,2005,71(5):056607.
[12]Zhang D,Zhai Y H,Wu L A,et al.Correlated twophoton imaging with true thermal light[J].Optics Letters,2005,30(18):2354-2356.
[13]Zhai Y H,Chen X H,Zhang D,et al.Two-photon interference with true thermal light[J].Physical Review A,2005,72(4):043805.
[14]Shapiro J H.Computational ghost imaging[J].Physical Review A,2008,78(6):061802.
[15]Bromberg Y,Katz O,Silberberg Y.Ghost imaging with a single detector[J].Physical Review A,2009,79(5):053840.
[16]Katz O,Bromberg Y,Silberberg Y.Compressive ghost imaging[J].AppliedPhysicsLetters,2009,95(13):131110.
[17]Duarte M F,Davenport M A,Takhar D,et al.Singlepixel imaging via compressive sampling[J].IEEE Signal Processing Magazine,2008,25(2):83-91.
[18]Radwell N,Mitchell K J,Gibson G M,et al.Single-pixel infrared and visible microscope[J].Optica,2014,1(5): 285-289.
[19]Single-pixelghostmicroscopybasedoncompressed sensing and complementary modulation[EB/OL].https: //www.researchgate.net/publication/271448272_ Single-pixel_ghost_microscopy_based_on_ compressed_sensing_and_complementary_ modulation,2015.
[20]Yu W K,Liu X F,Yao X R,et al.Complementary compressive imaging for the telescopic system[J].Scientific Reports,2014,4(4):5834-5834.
[21]Li M F,Mo X F,Zhao L J,et al.Single-pixel remote imaging based on Walsh-Hadamard transform[J].Acta Physica Sinica,2016,65(6):064201.
[22]Cheng J.Ghost imaging through turbulent atmosphere.[J].Optics Express,2009,17(10):7916-7921.
[23]Zhang P,Gong W,Xia S,et al.Correlated imaging through atmospheric turbulence[J].Physical Review A,2010,82(3):5183-5191.
[24]Meyers R E,Deacon K S,Shih Y.Turbulence-free ghost imaging[J].AppliedPhysicsLetters,2011,98(11):111115.
[25]Meyers R E,Deacon K S,Shih Y.Positive-negative turbulence-free ghost imaging[J].Applied Physics Letters,2012,100(13):131114.
[26]Shi D,Fan C,Zhang P,et al.Two-wavelength ghost imagingthroughatmosphericturbulence.[J].Optics Express,2013,21(2):2050-2064.
[27]Gong W L,Han S S.Super-resolution far-field ghost imaging via compressive sampling[EB/OL].https://arxiv.org/pdf/0911.4750v2.pdf,2009.
[28]Zhao C Q,Gong W L,Chen M L,et al.Ghost imaging lidarviasparsityconstraints[J].AppliedPhysics Letters,2012,101(14):141123.
[29]Gong W L,Zhao C Q,Jiao J,et al.Three-dimensional ghost imaging ladar[EB/OL].https://arxiv.org/abs/ 1301.5767,2013.
[30]Sun B,Edgar M P,Bowman R,et al.3D computational imaging with single-pixel detectors[J].Science,2013,340(6134):844-847.
[31]Howland G A,Dixon P B,Howell J C.Photon-counting compressive sensing laser radar for 3D imaging[J].Applied Optics,2011,50(31):5917-5920.
[32]Olivas S J,Rachlin Y,Gu L,et al.Characterization of a compressive imaging system using laboratory and natural light scenes[J].Applied Optics,2013,52(19):4515-4526.[33]Erkmen B I,Shapiro J H.Unified theory of ghost imaging with Gaussian-state light[J].Physical Review A,2008,77(4):043809.
[34]Ferri F,Magatti D,Lugiato L A,et al.Differential ghostimaging[J].PhysicalReviewLetters,2010,104(25):253603.
[35]Li MF,ZhangYR,LuoKH,etal.Time-correspondence differential ghost imaging[J].Physical Review A,2013,87(3):2285-2285.
[36]Li M F,Zhang Y R,Liu X F,et al.A double-threshold technique for fast time-correspondence imaging[J].Applied Physics Letters,2013,103(21):211119.
[37]Erkmen B I.Computational ghost imaging for remote sensing[J].Journal of the Optical Society of America A, 2012,29(5):782-789.
[38]Hardy N D,Shapiro J H.Computational ghost imaging versus imaging laser radar for 3D imaging[J].Physical Review A,2012,87(2):117-122.
[39]Howland G A,Lum D J,Ware M R,et al.Photon counting compressive depth mapping[J].Optics Express,2013,21(20):23822-23837.
The Key Technics in Quantum Imaging and Its Researching Status
LI Ming-fei1,2,MO Xiao-fan1,2,ZHANG An-ning1,2
(1.Beijing Institute of Aerospace Control Devices,Beijing 100039;2.Quantum Engineering Research Center,China Aerospace Science and Technology Corporation,Beijing 100871)
Quantum imaging has been realized with entanglement light source since 1995,and has the history more than two decades.Nowadays,many research fields and technolgies,such as compressive sensing,lidar and structure light illumination,are combined by quantum imaging technically and formed some new crossed subjects.In this paper,the histories of the quantum imaging are reviewed briefly,the key technical researching results in most recent years are analysised,and the future development trends of quantum imaging are also discussed.
quantum imaging;enganglement light source;compressive sensing;lidar;structure light illumination
O431.2
A
1674-5558(2016)07-01296
10.3969/j.issn.1674-5558.2016.05.001
李明飞,男,光学专业,博士,工程师,研究方向为量子成像、图像处理何结构光照明。
2016-07-26
