空间飞行器加速度计在轨标定方法
2016-10-14朱如意李永远
朱如意,李永远,孙 光
空间飞行器加速度计在轨标定方法
朱如意,李永远,孙 光
(中国运载火箭技术研究院研究发展中心,北京,100076)
针对空间飞行器在轨段未采用SINS/GPS组合导航方案的情况,提出一种采用“零加速度”方法对加速度计进行标定的方案。利用空间飞行器在轨运行的微重力环境,通过对加速度计测量值的分析和统计,对加速度计零偏误差进行估计。该标定方法简单,计算量小,且不需要其他辅助设备,完全自主标定,更适合于工程应用。
空间飞行器;加速度计;在轨标定
0 引 言
惯性器件在地面和空间飞行条件下的漂移率有很大差别,而且当受空间环境振动、辐照等影响时,其性能会退化,导致参数变化。加速度计作为惯性导航的核心器件,在轨标定是提高空间自主导航精度的一个重要手段[1]。
对空间飞行器来说,在轨飞行段需要使用加速度计对轨控发动机产生的加速度进行测量,从而完成轨道预报和制导算法计算,因此对加速度计进行在轨标定非常重要,直接关系到轨道控制的精度。
国内外诸多学者对卫星等使用的加速度计标定提出了多种方法[2]。目前对加速度计进行在轨标定的方法有以下几种:用重力场模型反演加速度计参数[3];利用引力标定加速度计[4];用轨道的精确数据推导加速度计的参数;根据发动机的推力来标定加速度计的参数;利用能量守恒方法进行标定[5];加速度计在轨参数校准等[6]。这些方法一般考虑同时标定加速度计零偏误差、比例因子误差,存在较大的耦合性,且算法复杂;或者需要其他设备辅助、成本较高、精度差,且在工程上难实现。
对空间飞行器在轨任务来说,加速度计在轨标定方法和飞行器在轨导航方案、在轨飞行任务阶段、空间环境、精度需求等多因素相关。若飞行器在轨飞行段采用了SINS/GPS组合导航方案,其导航滤波算法通常可直接给出加速度计零偏误差的估计值,因此可以不需要进行加速度计在轨标定。本文主要针对未采取SINS/GPS组合导航方案情况,提出一种采用“零加速度”方法对加速度计进行标定的方案,该标定算法简单,不需要其他辅助设备,完全自主标定,更适合于工程应用。
1 加速度计在轨标定方案
影响加速度计测量精度的误差因素很多,例如零偏误差、随机噪声、比例因子误差、安装误差等。对加速度计在轨标定算法的一般要求是:算法简单、计算量小同时满足标定的精度要求。因条件限制,不可能对所有误差因素都进行标定。为了简化分析,仅对其中最重要的零偏误差进行标定,而其它项误差由于在轨期间变化量不大而采用地面标定的数值。
根据飞行任务需求,若飞行器在轨飞行过程中大部分时间是无动力滑行阶段,此时飞行器所受到的各种扰动力的加速度在数值上很小,甚至比中等精度的加速度计的测量噪声还要小。根据对相关参考文献的调研,采用中等精度的IMU组件对空间飞行器在轨自由飞行阶段进行SINS/GPS组合导航,其绝对导航精度比单独的GPS导航精度还要差一些,IMU组件的常值偏差等项的估计效果也不理想。而中等精度的IMU组件能够敏感推力产生的加速度,可以应用SINS/GPS组合导航方案,但由于轨道转移时间通常较短,这样短的滤波时间可能导致滤波状态中的IMU组件常值偏差等项的估计过程还未收敛就已结束。若在空间飞行器上应用SINS/GPS组合导航系统,对IMU组件尤其是加速度计的灵敏度和测量精度提出了极高的要求,需要采用高性能、昂贵的IMU组件,这提高了空间飞行器的研制成本。实际上,在轨飞行过程中飞行器的姿态还可能导致有些时段不满足GPS接收机观测条件。因此空间飞行器在轨段未采用SINS/GPS组合导航方案的情况下,可利用空间飞行器在轨运行的微重力环境,通过对加速度计测量值的分析和统计,实现对加速度计零偏误差的估计。
本文假设在进行加速度计标定时,在标定的大部分时间内姿控推力器不参与工作,有效地简化了加速度计标定的处理过程;飞行器的角加速度在数值上很小,因此对加速度计测量影响可忽略不计。
为简化加速度计的在轨标定算法,本文采用“零加速度”方法对加速度计进行标定,即通过设置飞行器的工作模式,人为形成一个“零加速度”的环境(实际上是微加速度环境,其环境加速度项在标定允许的精度范围内),这样在测量值中去掉可预测的加速度项后,只剩下零偏误差和随机噪声误差,通过统计方法即可得到加速度计零偏误差的估计值。
2 加速度计测量数据处理
假设空间飞行器采用的加速度计沿飞行器体轴正交安装,并且加速度计为脉冲积分型,其测量值为两次测量时刻之间的速度增量。在加速度计标定期间,采集数据的时间间隔为固定值,则可按如下公式计算加速度测量值:
由于在轨自由飞行过程中,飞行器处于低加速度环境中,此时加速度计的其它误差因素(例如刻度因子误差、安装误差等)带来的测量误差可忽略不计,则加速度计的量测值可表示为

其中,由太阳辐射压、重力梯度效应带来的影响很小,其量级为10-8以下,可忽略不计;另外由于飞行器处于正常工作姿态下,其角加速度很小,项也可忽略不计。则除加速度计的零偏误差项和随机噪声项外,测量的加速度值主要包括大气阻力加速度、推力加速度和飞行器角速度带来的耦合项,下面进行分析。
a)飞行器角速度带来的耦合项。
若加速度计安装位置不在飞行器质心,则由于飞行器角速度带来的加速度项计算公式为
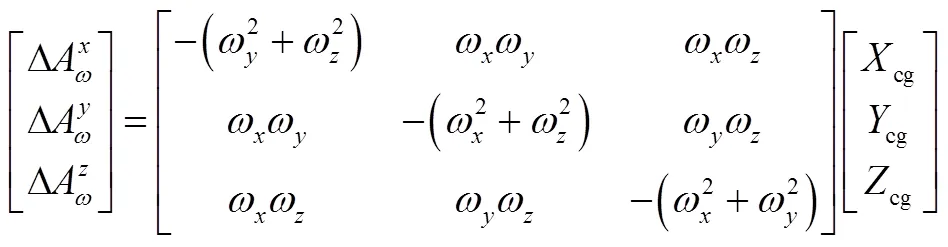
将加速度计的测量值减去飞行器角速度带来的耦合项,即可得到飞行器质心的加速度测量值为

b)推力加速度项。
由于在进行加速度计标定期间,飞行器姿控推力器基本不工作,因此,在此期间不会产生推力加速度。
c)大气阻力加速度项。
大气阻力产生的加速度项可表达为
根据分析可知,当飞行器对地定向飞行时,大气阻力加速度主要集中在飞行器的轴方向,即对轴方向加速度计测量影响较大。
考虑到高层大气密度以及飞行器相对大气的速度很难精确得到,采用如下方案:a)在进行标定时,只选取等效横截面积较小的测量区间;b)按式(5)对3个方向的大气阻力加速度进行粗略估算,当飞行器高度高于一定的阈值时,此时大气密度较小,大气阻力加速度项低于标定允许的误差,则使用该区间段的测量数据对加速度计进行标定,此时该区间的大气阻力加速度项可忽略不计,即选择一个可使大气阻力加速度项相对标定精度要求而言可忽略不计的测量区间进行标定,以简化标定算法。
3 加速度计零偏误差的估计
经上述处理和选择测量区间后,除去飞行器角速度导致的耦合加速度项,加速度计测量值主要是由零偏误差和随机噪声误差组成,下面就可通过统计方法得到加速度计零偏误差的估计值,分两种情况估计加速度计零偏误差。
a)工作温度对加速度计零偏误差的影响可忽略。
此时可直接对上述处理得到的测量值进行简单的求平均值处理即可,则零偏误差的估计公式为
b)工作温度对加速度计零偏误差影响不可忽略。
当工作温度对加速度计零偏误差的影响不可忽略时,可认为零偏误差的表达式为
4 结束语
本文针对空间飞行器在轨段未采用SINS/GPS组合导航方案的情况,利用空间飞行器在轨运行的微重力环境,建立加速度计误差模型,分析各误差项的影响,并通过对加速度计测量值的分析和统计,对加速度计零偏误差进行估计,实现在轨标定。该标定方法也可应用于类似飞行器研制中,更适合于工程应用。
[1] Raman K V. Multiple approaches for gyro calibration of intelsat satellites[J]. Advances in the Astronautical Sciences, 2000,103(3): 2039-2053.
[2] Bar I. Comparison between implicit and explicit spacecraft gyro calibration[J]. WSEAS Transactions on Circuits and Systems, 2003, 4(2): 728-734.
[3] Wang F R. Study on center of mass calibration and K-band ranging system calibration of the GRACE mission[D]. Austin: University of Texas, 2003.
[4] 王强, 万庆元. 高精度空间加速度计在轨引力标定方案[J]. 物探与化探, 2007,31(2): 153-156.
[5] Visser P, Sneeuw N, Gerlanch C. Energy integral method for gravity field determination from satellite orbit coordinates[J]. Journal of Geodesy, 2003,77(3-4): 207-216.
[6] 周泽兵, 白彦峥, 祝竺, 等. 卫星重力测量中加速度计在轨参数校准方法研究[J]. 中国空间科学技术, 2009(6):74-80.
On-orbit Calibration Method of Accelerometer for Space Vehicle
Zhu Ru-yi, Li Yong-yuan, Sun Guang
(R&D Center, China Academy of Vehicle Technology, Beijing, 100076)
According to the condition of not-using SINS/GPS integrated navigation technique on orbit for space vehicle, a calibration method of accelerometer based on “zero acceleration” is proposed. Using the tiny-gravity environment where space vehicle is undergoing on orbit, the measuring result of accelerometer is analyzed, and statistical calculation is applied, as to realize the calibration of accelerometer bias. The calibration method is simple, computational complexity is small, and other aided-equipment is not needed, so this calibration method is completely independence, which is more adapted to engineering application.
Space vehicle, Accelerometer, On-orbit calibration
1004-7182(2016)02-0097-03
10.7654/j.issn.1004-7182.20160222
TJ765.3
A
2015-05-19;修改日期:2015-10-23
朱如意(1985-),女,工程师,主要研究方向为导航、制导与控制
