基于火箭遥测的星箭天线方向监视方法
2016-10-14邹春华李红艳陈红英
黄 琼,邹春华,李红艳,陈红英
基于火箭遥测的星箭天线方向监视方法
黄 琼,邹春华,李红艳,陈红英
(中国卫星海上测控部,江阴,214431)
在入轨段测控任务中,为了实时监视火箭和卫星的天线方向性,基于测量船跟踪计算软件的实际,通过分析入轨段火箭飞行姿态、位置等测量数据,设计利用火箭实时遥测数据计算火箭和卫星天线方向性的方案,规定了具体流程,并通过实例计算,验证了该方法的可行性。
火箭遥测;飞行姿态;天线方向性;实时
0 引 言
火箭飞行任务中,在入轨段需要进行姿态调整和控制,以建立卫星入轨姿态。火箭的姿态决定火箭和其运载的卫星天线方向性的变化。航天器的测控天线一般是宽波束天线,不同方向的信号增益往往是不同的,天线的方向性图测试时是以波束中心轴作为参考,而船载测控设备的天线为窄波束天线,跟踪时波束指向测控目标,目标天线波束中心与船载测控天线波束中心的连线即测量线(即测站与目标的连线)与目标天线波束中心轴的夹角决定目标测控天线的增益情况[1]。测量船在承担入轨段跟踪测控时,一套统一测控设备往往同时承担火箭和其运载的卫星的测控任务,星箭分离时刻往往是火箭测量任务的终止时刻,也是卫星测控任务的起始时刻。因此在制定测量船海上测控技术实施方案时,需利用火箭和卫星的飞行轨迹和姿态分析测控天线对测量船的覆盖情况,以保证测量船执行任务时捕获跟踪目标稳定。
目前,测量船执行任务对目标天线的覆盖情况主要依赖任务前期理论分析计算的结果,缺少对卫星和火箭天线方向性的实时监视手段。在实际飞行跟踪测控过程中,常常发生信号电平的强弱变化与理论分析不一致,信号正常的情况出现卫星信号起伏,不仅影响到外测精度,严重情况还将影响跟踪,造成目标丢失。
为此需要根据测量船执行任务情况和测量船软件架构实现对卫星、火箭天线方向性实时监视的方法和流程,满足测量船海上测控任务对目标天线覆盖情况监视的需要,从而使测量船能够实时监视火箭、卫星天线方向,在某些时段测控天线不能覆盖测站的异常情况下,操作人员能够根据天线实际方向及时采取规避、切换等方法确保跟踪稳定。因此,本文提出一种基于火箭遥测数据实时计算火箭和卫星天线方向性的方法。
1 天线方向性计算
1.1 坐标系转换
坐标系统是指描述空间位置的表达形式,种类很多,但均由一定物理意义的原点、基准面和基准线、坐标原点、主参考平面和主方向构成。坐标原点是在坐标系统中所有坐标均等于0的点;主参考平面也可称为主平面,是坐标系统的定位和定向所依靠的主要参考平面;主方向是坐标系统中主坐标轴所指的方向,一般指向有某种几何或物理意义的特征点。常用的坐标系、和轴的顺序按右手法则确定[2]。
坐标系转换包含坐标系变换和基准变换。前者指在同一地球椭球下空间点的不同坐标表示形式之间的变换;后者指空间点在不同定义的地球椭球之间的坐标变换。不同基准之间的转换方法很多,常用到如下方法:
假设,在某一坐标系中的矢量为,在旋转后的新坐标中为,若平面、平面和平面分别绕轴、轴和轴转动角(逆时针为正),那么[3]:

其中,

1.2 入轨段测量船数据获取情况
在海上测控方案制定前,火箭方、卫星方和发射中心需要事先提供飞行器标称的飞行轨道,包括发射工位的精确天文坐标、大地坐标和起飞基准方位方向,卫星和火箭的天线方向图,以及卫星装箭位置情况等。
在跟踪测量过程,测量船能实时获取并进行实时计算的数据有:
a)飞行器姿态数据。包括飞行器在发射惯性坐标系(以下简称发惯系)下的俯仰、偏航以及滚动姿态角数据[4]。可以通过处理火箭实时下传的调频遥测中的计算机字得到。
b)目标本体数据。目标本体数据包含不同飞行器的位置、速度等信息,这些数据可通过不同途径获取。如,火箭的本体坐标数据可以从外测雷达数据处理得到,也可以通过处理火箭下行调频遥测中的计算机字得到,还可以通过火箭GNSS位置数据得到;卫星的本体数据则可以从卫星外测数据处理得到。
c)测量船位。是由船姿船位系统实时获取并提供的测量船工作位置,包括经度ship、纬度ship和高程ship,常采用大地坐标系表示。
d)处理使用时间。获取发射时间0以及北京时间。
1.3 测量船跟踪计算现状
测量船数据处理涉及的坐标系种类繁多,关系复杂。既涉及到发射、测量、弹体等坐标系,也涉及到测量、轨道及飞行器等坐标系,还涉及到天文、各类大地参考系等坐标系;既有与飞行器位置数据的关系,也有与飞行轨道的关系,还与天文、大地参考系的关系。在测量船实时处理和显示软件中,相应坐标之间的转换关系如图1所示[1,5]。

图1 测量船常用坐标系统转换关系
在入轨段测量任务中,测量船需要实时处理的数据类别主要有遥测数据和外测数据。前者包括火箭的秒节点弹道、关机点弹道和特征点弹道等,其原始数据用发惯系表示,经坐标转换得到地心固连坐标系(通常为DX-2坐标系)数据后向任务中心传输。后者则包括统一载波测控系统和脉冲雷达的测量数据(测距、测角等)、卫星导航系统测量船位、惯导测量船姿数据以及测量船变形数据等,经过处理后得到测站地平坐标系下的跟踪测元(方位角、俯仰角、距离),其中脉冲雷达的数据经过坐标转换得到地心固连坐标系数据[5]。
1.4 天线方向性计算方案
文献[1]、[6]论述了根据发射坐标系下的火箭位置、姿态数据计算天线方向性的具体方法,但测量船若需实时处理和监视显示测控天线指向情况,不仅需要对测量船相对目标本体坐标系的位置进行计算,还要分析测量线相对目标本体坐标系轴的夹角。同时,还要对飞行器飞行姿态数据进行欧拉变换,计算量较大。为了适用测量船软件实际,同时便于实时计算和监视显示,针对飞行姿态数据为发惯系的实际情况,设计了如下监视计算方法和过程[7]:
a)根据发射时刻0和遥测数据包中的北京时间c计算飞行时长:
=c-0
b)根据c时刻火箭遥测计算机字处理得到火箭姿态信息,即火箭的姿态参数(俯仰程序角c、偏航程序角c、滚动程序角c、俯仰程序角偏差Δ、偏航程序角偏差Δ及滚动程序角偏差Δ),按其物理含义即可得出发惯系下的姿态角:
=+Δ
=c+Δ
=c+Δ
c)根据c时刻的测量船位置和高程数据(c,c,c),按下列公式转换成地心固连系位置参数,即:

式中c为卯酉圈的曲率半径,(其中,为地球椭球赤道半径;为第1地球偏心率)。
同理,根据发射工位中火箭弹体的初始坐标(大地纬度f、经度f和高程f)计算出火箭初始点的地固系位置参数,和。
d)根据c时刻地心固连系的火箭弹体数据e,e和e,按下式转换成发惯系下的,和,即:
式中f为发射工位天文经度;f为发射工位天文纬度;f为起飞基准方位方向;为地球自转角速度;为飞行时长。
同理,根据测量船位置(c,c和c)计算发惯系下船位,和。
e)计算测量船在火箭弹体坐标系的位置参数,公式如下:
g)根据事前提供的火箭本体与卫星本体的对应关系,应用前章节旋转矩阵(),即可处理出测量线在卫星本体上的方向。定义为测量线与卫星天线增益中心轴的夹角,以表征天线的方向性。假定卫星天线增益中心轴相对火箭弹体坐标系的和分别为和,则可采用下式计算:

h)根据夹角及火箭、卫星的天线方向性测试图(由火箭、卫星研制部门提供)得知当前火箭、卫星对测站的天线覆盖情况。具体的流程如图2所示。
图2 星箭天线方向实时监视方法流程
2 实际应用
某任务中,测量船同时对火箭和卫星两个目标进行测控。火箭三子级末速修正关机比预定时间提前约25 s,在火箭调姿过程中,设备跟踪卫星的AGC电压存在明显波动,信号不稳定。通过事后数据处理发现测距二阶差分量存在跳变的现象,具体测距差分[9]图见图3。
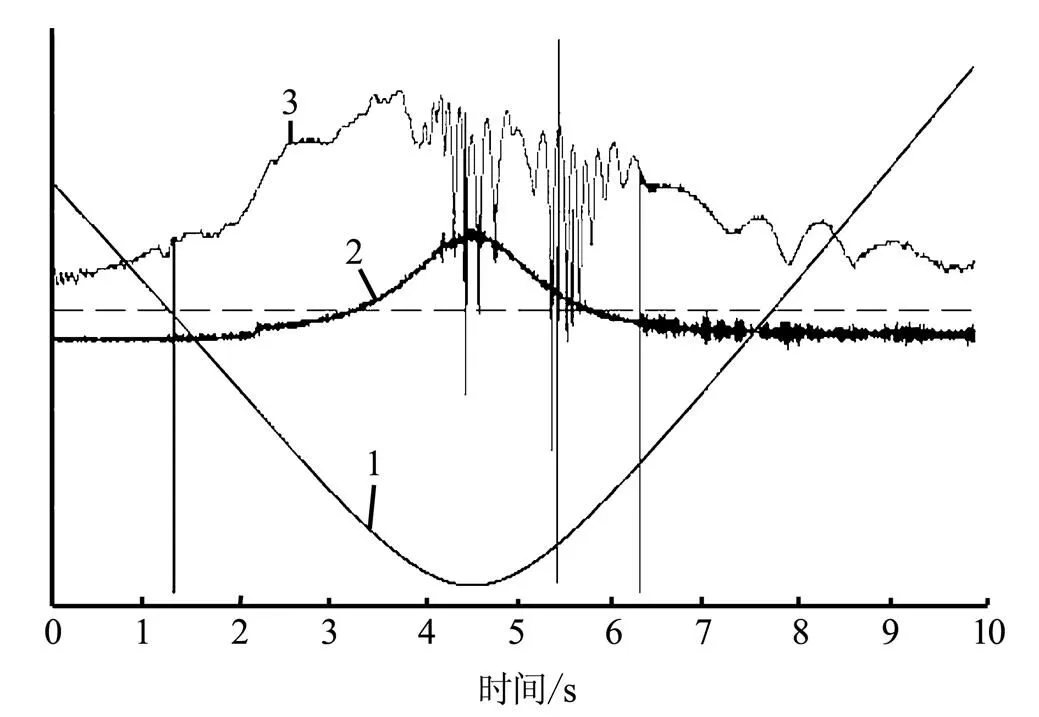
图3 测距差分图
1—USB_R (0,200),(1∶240,1∶200km);2—USB_R二阶差分(0,-11),(1∶240,1∶4m);3—USB_AGC DAT (0,1.2),(1∶240,1∶0.50无量纲)
因为卫星天线增益通常具有轴对称性,因此根据卫星方提供的卫星天线方向图可知超过某一角度,假设为时,卫星信号增益不作设计要求。在该次海上测控方案设计时,值未超过,理论上满足设计指标。但实际任务中存在信号增益起伏较大的现象,具体如图4所示。

图4 天线方向性夹角
3 结 论
本文根据测量船执行入轨段测控任务的实际情况,提出基于火箭实时数据监视计算火箭、卫星天线方向性的方案。该方案主要进行旋转矩阵的计算,省去了对火箭姿态的欧拉角进行转换,方法过程简明、易实现,并运用任务的实际数据进行了试算,很好地反映了飞行器测控天线对测站的覆盖情况。
方案还充分考虑到航天测量船计算航天器入轨参数的现状。相关软件已将旋转矩阵()编制成动态链接库,只需在原航天测量船坐标系转换基础上进行相应扩充,增加测量船在火箭本体坐标系的位置、测量线在卫星本体坐标系的指向等计算,即可实现实时计算并监视显示卫星火箭方向性的目的。
本文提出的实时计算天线方向性的方法,对测量船执行入轨段测控任务,尤其对测量船多目标测控任务跟踪时具有很强的实用价值。
[1] 简仕龙. 航天测量船海上测控技术概论[M]. 北京: 国防工业出版社, 2008.
[2] 胡雅斯, 孟新, 李立钢. 适用多传感器的卫星对地覆盖计算模型[J]. 遥感技术与应用, 2009(4):537-543.
[3] 李广宇. 天球参考系变换及其应用[M]. 北京: 科学出版社, 2010.
[4] 陈以恩. 遥测数据处理[M]. 北京: 国防工业出版社, 2002.
[5] 江文达. 航天测量船[M]. 北京: 国防工业出版社, 2002.
[6] 刘靖. 运载火箭天基测控天线覆盖性能分析[J]. 遥测遥控, 2012(5): 51-56.
[7] 邹春华, 黄琼, 何晶, 陈红英. 入轨段星箭天线指向实时计算方法[C]. 北京: 空天资源的可持续发展——第一届中国空天安全会议论文集, 2015.
[8] 丁溯泉, 张波, 刘世勇. STK在航天任务仿真分析中的应用[M]. 北京:国防工业出版社, 2011.
[9] 刘利生. 外弹道测量数据处理[M]. 北京: 国防工业出版社, 2002.
A Monitoring Method of Antenna Direction Based on the Real-time Telemetering Data of Rockets
Huang Qiong, Zou Chun-hua, Li Hong-yan, Chen Hong-ying
(China Satellite Maritime Tracking and Control Department, Jiangyin, 214431)
To monitor the antenna directivity of rockets and satellites in injection phase, an antenna directivity calculating method that uses real time telemetering data is developed through analyzing rocket’s measured data such as flight attitude and location, etc. The process flow is specified as well. Additionally, a practical calculation is given in this paper to verify the availability of the method.
Telemetering of rockets; Flight attitude; Antenna directivity; Real time
1004-7182(2016)02-0086-04
10.7654/j.issn.1004-7182.20160219
V556.3
A
2015-04-03;
2015-06-25
黄 琼(1979-),女,工程师,主要研究方向为航天测控总体
