一种考虑禁飞圆约束的在线再入弹道规划方法
2016-10-14杨小龙付维贤
王 鹏,杨小龙,付维贤,李 强
一种考虑禁飞圆约束的在线再入弹道规划方法
王 鹏,杨小龙,付维贤,李 强
(北京宇航系统工程研究所,北京,100076)
采用基于航向误差走廊的横向机动策略绕飞禁飞圆,满足过程约束的同时也使得包含速度倾角在内的其它终端状态参数满足约束条件。飞行过程中实时进行弹道更新,提高跟踪精度的同时,也使得再入飞行器初步具备了飞行过程中自主变换打击目标的能力。仿真结果表明,给出的规划方法能实时规划出满足约束的再入弹道,以较高的精度到达再入段终点的同时具有较好轨迹特性。
再入段;阻力加速度-能量剖面;速度倾角控制;阻力加速度更新
0 引 言
为使飞行器跨越大气层安全返回地面,满足多种约束条件的参考轨迹的快速生成一直是再入制导研究的热点。文献[1]通过规划满足约束的阻力加速度-速度剖面完成航天飞机参考轨迹的生成;文献[2]基于射程需求,将能量作为独立变量,利用优化算法迭代计算得出满足再入走廊的参考弹道,并根据落点和离轨点及导航误差更新参考弹道;文献[3]将再入轨迹分为常值热流和线性侧倾角控制两段,前一段轨迹可获得解析解,后一段中的控制参数通过打靶法求解,从而获得完整的参考轨迹;文献[4]将航天飞机的二维再入轨迹规划扩展到三维情况,采用基于降阶的运动方程和最优控制理论实现纵横向参考加速度的在线规划;文献[5]利用拟平衡滑翔条件,将弹道约束转换为控制变量约束,并将轨迹规划问题转化为两个单参数搜索问题,实现三维轨迹的在线规划;文献[6]在文献[5]基础上考虑地球旋转影响改进了拟平衡滑翔条件,并利用航向角误差走廊实现大横程情况下的控制,并在文献[7]中对禁飞圆的绕飞策略进行研究,提出了基于禁飞圆的横向几何制导方法。
本文研究对象为轴对称再入飞行器,研究内容为再入点至速度倾角为0°的平飞点之间的再入弹道设计。与其他的研究工作相比,本文在弹道规划过程中不仅考虑力热约束和终端约束,同时还考虑飞行过程中的禁飞圆约束,其创新点在于在弹道规划的基础上通过弹道实时更新增强飞行器飞行过程中的自主性。
1 问题描述
再入运动方程为时变非线性微分方程,为了在强约束情况下得到控制量,一般通过事先设计攻角曲线将过程约束转化为再入走廊处理。
1.1 再入运动方程
(2)
(4)
(5)
(7)
(8)
1.2 再入攻角曲线
再入过程分为阻力加速度跟踪和速度倾角控制两段,前段需保证有足够的控制力跟踪阻力加速度曲线,后段需保证能够完成拉起操作。考虑上述两段的攻角需求,攻角曲线设定为如下关于速度的分段线性函数:

1.3 再入走廊
当再入攻角方案确定后,阻力加速度-能量平面上的再入走廊上边界由热流约束式(10)、过载约束式(11)确定,下边界由平衡滑翔条件式(12)确定:

(11)
(12)
图1和图2分别为攻角曲线和相应的再入走廊。
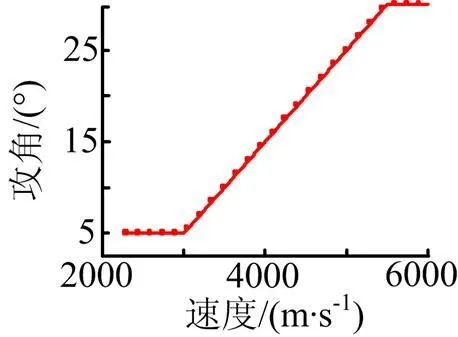
图1 再入攻角曲线
上述约束确定的再入走廊保证了飞行过程中的安全,但对整个飞行而言,长时间机动飞行带来的热流累积给防热系统造成很大负担,因此除了上述约束外,还必须满足总加热量约束条件:
1.4 禁飞区约束
将禁飞区视为无限高圆柱体,飞行过程中弹道必须在该圆柱体之外,在经纬度平面上飞行轨迹不能与该圆柱体底面确定的禁飞圆相交。
1.5 终端条件
再入段终点严格来说并非是一个点,而是一定大小的区域,飞行器在进入该区域的同时也要保证具有相应的速度大小和方向。根据任务要求,本文终端经度、纬度和高度参数须保证在规定的精度范围内,速度大小则必须大于某一下限值,最后速度倾角要保证在0°附近。
2 弹道规划
弹道规划采用纵横向分离的方法,以纵向规划为主。纵向规划时主要考虑射程和飞行约束,横向规划主要考虑横程和横向机动方式。
2.1 纵向弹道规划
纵向弹道规划分为阻力加速度跟踪和速度倾角控制两段,阻力加速度跟踪段为飞行中的主要飞行阶段,其主要目标是在再入走廊中将大部分飞行状态参数置于终端约束附近,此段轨迹跟踪选用PD反馈跟踪方法。速度倾角控制段为末端修正段,在控制速度倾角的同时,通过终端反馈调整过渡点参数使所有终端约束得到满足。
2.1.1 阻力加速度跟踪段
a)阻力加速度-能量曲线。

图3 阻力加速度曲线示意
为适应不同再入速度倾角引起的阻力加速度曲线变化,采取如下的阻力加速度构造策略:
在段,如果初始速度倾角大于某一数值,那么阻力加速度应当迅速增加,这时选用段间的1段,其它情况选用2段。
b)倾侧角指令。
由于求导过程中略去了高阶项,同时使用了不精确的指数公式来描述大气模型,式(15)得出的倾侧角指令并不能复现规划的-剖面,为此加入阻力加速度误差的偏差项和微分项形成PD控制,得到实际的竖直方向升阻比:

2.1.2 速度倾角控制段
考虑到速度倾角相对速度大小、高度、经度和纬度而言为快变量,在终端附近增加一个速度倾角控制段来满足终端速度倾角约束。采用的速度倾角控制律可使终端速度倾角以指数形式趋近于0°,考虑到实际计算中速度倾角变化不必如此精确,速度倾角控制段的倾侧角为0°保证以全升力拉起。
过渡点速度根据终端速度约束确定为固定值,忽略过渡点高度对过渡点速度倾角的影响,以速度倾角控制后的终端高度去反馈调节过渡点高度,最终可使终端高度满足高度约束条件。实际上,过渡点高度会影响过渡点的速度倾角,且过渡点的高度越高,对应的速度倾角绝对值越小,此规律可加速整个过渡点高度的迭代过程,使终端高度约束很快得到满足。
2.2 横向弹道规划
纵向弹道规划根据纵向约束在确定阻力加速度曲线的基础上计算得到倾侧角的大小,横向弹道规划的目的是在此基础上根据飞行过程中的横向几何约束确定横向机动策略以及对应的倾侧角符号控制方案。
2.2.1 横向机动策略
选用初始时刻速度矢量和目标视线矢量作为是否绕飞禁飞圆的判据:在两者都不经过禁飞圆的情况下,飞行器无需绕飞;如果至少有一个矢量经过禁飞圆,此时飞行器就必须绕飞禁飞圆。
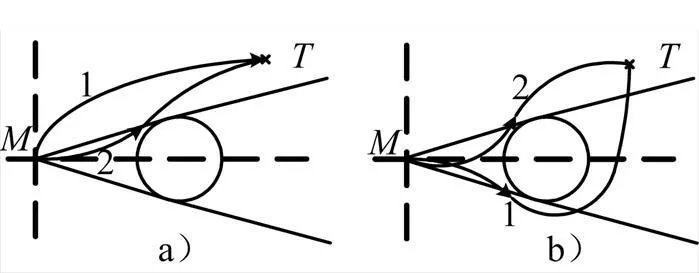
图4为目标点位于飞行器与禁飞圆圆心连线上方时的飞行情况。和分别对应再入初始时刻的飞行器和目标点位置。图4a和图4b中目标点位于禁飞圆阴影外;图4c和图4d中,目标点位于禁飞圆阴影内,每个图根据初始速度矢量方向的不同有两种不同的横向机动策略。
2.2.2 倾侧角符号控制
图5为绕飞禁飞圆时示意。

图5 禁飞圆绕飞示意
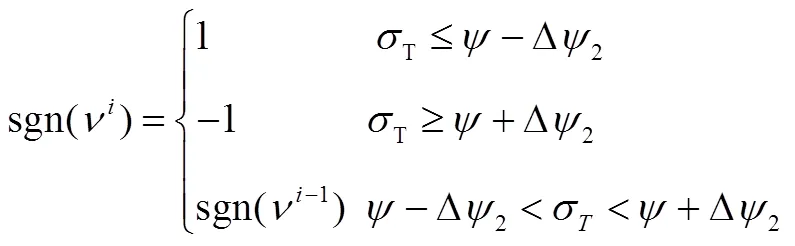
禁飞圆圆心在初始射向方向上将绕飞过程划分2个区域(Ⅰ,Ⅱ),区域Ⅰ保证飞行器在禁飞圆切线外飞行,区域Ⅱ保证飞行器飞向目标点。
a)飞行器位于区域Ⅰ时,倾侧角符号控制方案为
1)从上方绕飞:

2)从下方绕飞:
(18)
b)飞行器位于区域Ⅱ时,倾侧角符号由式(19)确定:
将纵横向弹道规划结合形成整个弹道规划,图6为整个规划过程的流程。
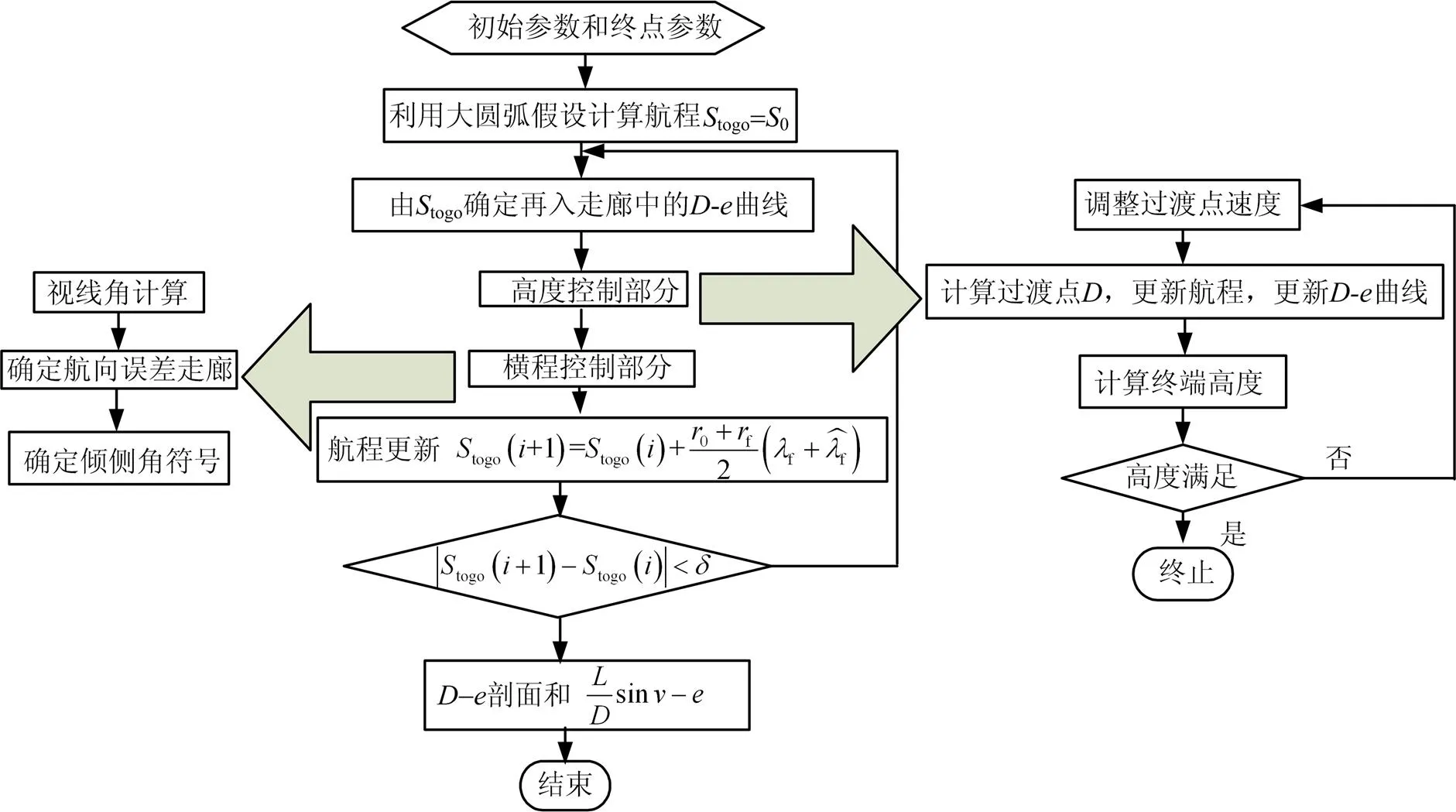
图6 弹道规划流程
3 弹道更新
信息化条件下打击目标时可能需要根据数据链信息中途改变弹道,实时进行弹道更新可以保证飞行器实现这种能力:飞行器先按原规划阻力加速度曲线飞行,根据途中新目标点或禁飞区信息重新生成阻力加速度曲线,引导飞行器飞向目标点。
前期弹道规划确定了阻力加速度曲线形式,更新时保持其形式不变,只对阻力加速度数值进行调整,图7为阻力加速度更新过程示意。

a)和段阻力加速度曲线更新
b)段阻力加速度曲线更新
图7 阻力加速度曲线更新示意
图7中,不带撇的参数表示的曲线为原有阻力加速度曲线;带撇的参数为更新后的阻力加速度曲线,分别表示更新点的两种位置情况。图7a中的参数调整相对简单,只要在原有曲线上做上下平移即可,由于只有在更新点之后的阻力加速度曲线影响实际阻力加速度曲线,因此即使前段阻力加速度曲线发生变化也不影响整个弹道更新过程,图7b中由于要保证终点(d点)的阻力加速度大小不变,更新过程稍显复杂,需要进行相应的数学计算。
a)更新点在cd_mid之前。
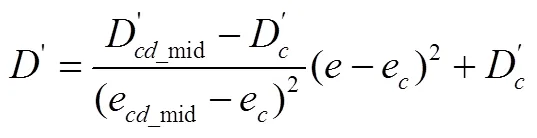
(21)
b)更新点在_mid之后。

(23)
4 仿真算例与分析
考虑到飞行器机动能力有限,禁飞圆设定在初始射面上,终端约束点为航路点。禁飞圆参数包括:圆心经度=136°,纬度=32.7°,半径=0.4°。航向误差走廊有:过禁飞圆之前航迹偏航角偏差为,瞄准目标点时航迹偏航角偏差为。
a)确定绕飞方案。
为确定飞行器采用何种策略能够顺利绕飞禁飞圆,进行不同绕飞策略下的仿真,表1给出了终端参数值,图8给出了部分状态参数变化情况。图8a中,案例1没有考虑禁飞圆直接瞄准终端点飞行,案例2中从左方绕飞禁飞圆时绕飞失败,案例3从右方绕飞成功避开了禁飞圆。图8b中,3种案例在航向误差走廊控制下航迹偏航角(曲线)都跟踪视线角(曲线)变化,能量=0.3之前视线角为与禁飞圆相切的切线的航向角,在接近禁飞圆飞行时变化迅速,能量=0.3之后的视线角则根据飞行器与目标点的关系计算。图8a中,案例1没有考虑禁飞圆直接瞄准终端点飞行,案例2中从左方绕飞禁飞圆时绕飞失败,案例3从右方绕飞成功避开了禁飞圆。图8b中,3种案例在航向误差走廊控制下航迹偏航角(曲线)都跟踪视线角(曲线)变化,能量=0.3之前视线角为与禁飞圆相切的切线的航向角,在接近禁飞圆飞行时变化迅速,能量=0.3之后的视线角则根据飞行器与目标点的关系计算。
a)纬度-经度曲线
b)视线角与航迹偏航角-能量曲线
图8 不同绕飞方向的仿真结果
b)弹道实时更新。
为考察算法通过实时更新更改弹道的能力,进行如下仿真验证:在飞行器飞至能量=0.4时告知新目标点信息,新目标点和除经纬度和原目标点不同外其它要求相同。表2给出了具体的目标点参数和算法的计算结果,表3给出了更新点处的阻力加速度变化值。表2中,更新后终端速度大小稍有降低,由于航向误差走廊对横程控制不精确造成终端纬度精度稍低。表3中在更新点能量=0.4之前(包括=0.4)由于目标点位置没变,更新点的阻力加速度数值变化不大,在=0.4之后,目标点改变导致重新生成的阻力加速度曲线发生较大变化,阻力加速度变化Δ达到15 m/s2左右。
图9给出了规划和更新过程中的状态参数变化。

表2 规划和更新时的终端实际参数(速度和高度为无量纲参数)

表3 更新时更新点处的阻力加速度变化值
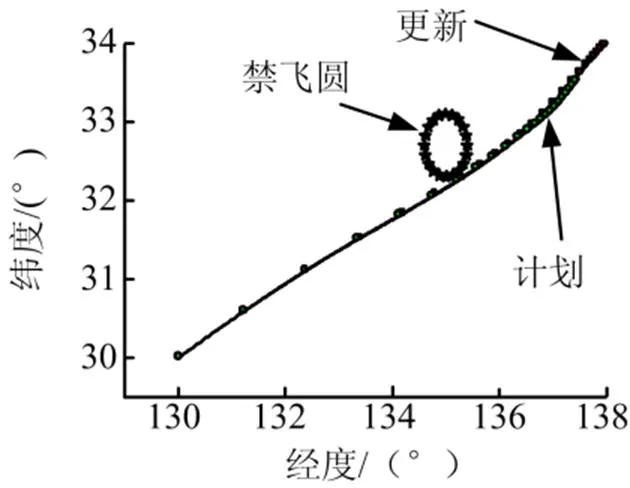
a)纬度-经度曲线
b)阻力加速度-能量曲线

c)速度倾角-时间曲线
d)高度-速度曲线
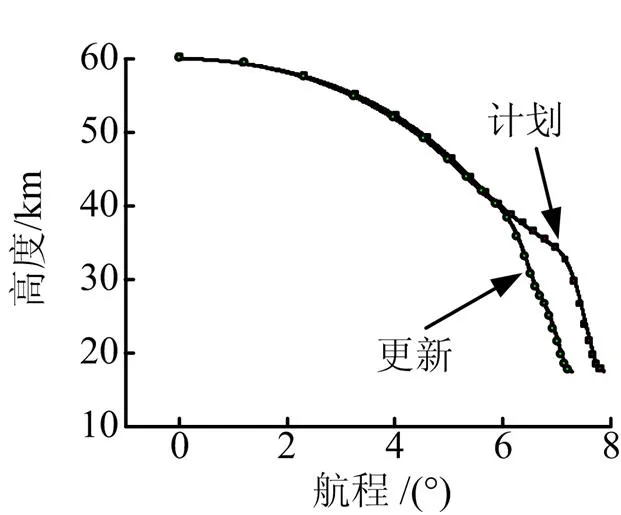
e)高度-航程曲线
从图9a看出,飞行器均绕过禁飞圆到达目标点;图9b中更新能量点=0.45处飞行器根据实际状态和新目标点位置重新规划阻力加速度曲线,导致规划的阻力加速度曲线出现较大跳变。在制导律作用下实际阻力加速度曲线向新规划的阻力加速度曲线靠拢,直到阻力加速度跟踪段结束时才跟踪上规划的阻力加速度曲线。图9c中后端速度倾角减小、增大、再减小的过程对应目标点变化后图9b中阻力加速度重新规划后实际阻力加速度的变化过程:速度倾角减小,其绝对值增大,弹头下压明显,阻力加速度数值迅速增大;速度倾角增大,其绝对值减小,弹头开始抬升,阻力加速度数值变化平缓。图9d和图9e为高度、速度以及航程的对应关系,可以看到在得知目标点位置靠近后飞行器迅速下压,整个航程减小,由于过渡点速度不变,因此飞行结束时终端速度差异并不算太大。综上所述,针对禁飞圆的在线弹道规划方法在中途更改打击目标的情况下同样能够满足相应终端约束。
5 结 论
本文研究了一种考虑禁飞圆约束的在线弹道规划方法,在事先进行攻角曲线设计和再入走廊分析的基础上,将整个弹道规划分为纵向规划和横向规划,纵向规划时分为阻力加速度跟踪和速度倾角控制两段处理,横向规划时采用航向误差走廊绕飞禁飞区,整个飞行过程中实时进行弹道更新。仿真计算表明,利用本文的方法不但可在规定的时间内生成一条满足多约束的再入弹道,而且在飞行过程中能够根据外界信息实时调整弹道,是一个很有潜力的在线弹道规划方法。
[1] Harpold J C, Graves A C. Shuttle entry guidance[J]. The Journal of the Astronautical Sciences,1979, 37(3): 239- 268.
[2] Roenneke A J.Adaptive on-board guidance for entry vehicles[C]. Montreal: AIAA Guidance, Navigation and Control Conference and Exhibit, 2001.
[3] Zimmerman C, Dukeman G, Hanson J. Automatic method to compute orbital reentry trajectories with heating constraints[J]. Journal of Guidance, Control and Dynamics, 2003, 26(4): 523-529.
[4] Mease K D, Chen D, Teufel P, Schonenberger H. Reduced-order entry trajectory planning for acceleration guidance[J]. Journal of Guidance, Control and Dynamics, 2002, 25(2): 257-266.
[5] Shen Z ,Lu P. Onboard generation of three dimensional constrained entry trajectories[J]. Journal of Guidance, Control and Dynamics, 2003, 26(1): 110-121.
[6] 雍恩米, 唐国金, 陈磊. 高超声速无动力远程滑翔飞行器多约束条件下的轨迹快速生成[J]. 宇航学报, 2008, 28(1): 46-52.
[7] 雍恩米, 钱炜祺, 唐伟, 冯毅. 考虑禁飞圆的滑翔式机动弹道与气动特性参数耦合设计[J]. 航空学报, 2013, 34(1): 66-75.
An On-board Reentry Trajectory Planning Method with No-fly Zone Constraints
Wang Peng, Yang Xiao-long, Fu Wei-xian, Li Qiang
(Beijing Institute of Aerospace Systems Engineering, Beijing, 100076)
The use of transverse maneuver strategy based on heading error corridor meets the process constraint requirements. So do other terminal state parameters. Trajectory updating in flight enhances the tracking accuracy and enables the reentry vehicle to switch attack target autonomously. Simulation results demonstrate that the proposed method can not only conduct an on-board real-time trajectory planning satisfying both path and terminal state constraints, but also reach the end point in good condition.
Reentry phase; Drag acceleration-energy profile; Flight-path angle control; Drag acceleration updating
1004-7182(2016)02-0001-07
10.7654/j.issn.1004-7182.20160201
V412
A
2014-12-07;
2015-01-15
王 鹏(1990-),男,硕士研究生,主要研究方向为弹道设计
