往复式机械泵辅助两相流冷却系统试验研究*
2016-09-07陈陶菲徐德好
陈陶菲,徐德好,柯 攀
(1. 南京电子技术研究所, 江苏 南京 210039; 2. 东南大学能源与环境学院, 江苏 南京 210096)
往复式机械泵辅助两相流冷却系统试验研究*
陈陶菲1,徐德好1,柯 攀2
(1. 南京电子技术研究所, 江苏 南京 210039; 2. 东南大学能源与环境学院, 江苏 南京 210096)
文中介绍了一种机械泵辅助两相流系统(Mechanically Pumped Cooling Loop, MPCL),为使MPCL系统更加稳定可靠,研制了一种往复式两相流冷却系统,并对系统不同充液率、启动时间和运行性能进行了研究,获取了最佳充灌率。研究发现,不均匀热源和驱动力不足将降低系统的性能。试验方案从改善热源和提高机械泵驱动能力2方面予以了改进。热源改善后,启动时间缩短,运行性能得到提升。在热源改善的基础上,提高机械泵的驱动能力,可使系统的稳态温度降低,温度波动变小。系统运行时可加大热载荷,在热载荷变化时,系统不会产生温度脉冲。总之,系统的热性能得到大大改善。试验表明,MPCL系统启动平稳,运行安全可靠。系统等效导热系数提高,温度一致性也较好。该系统试验研究结果可作为后续研究的基础。
往复式机械泵辅助两相流系统;温度一致性;热导性能
引 言
随着电子技术的发展,电子设备的组装密度和单器件的热流密度越来越高,热控设计难度越来越大。传统的单相流冷却已无法满足后续电子设备发展的需求,为此产生了大量相变冷却方式。
两相流冷却技术的主要特点是热传输阻力小,均温性好。两相流冷却的主要形式包括传统的热管及其衍生产品CPL、LHP、Vapor Chamber和PHP。文献[1]和[2]研究了喷射泵驱动的两相流冷却系统;文献[3]成功地通过机械泵驱动的单相流散热系统HRS完成了火星探测器上的热管理;文献[4]和[5]研究了混合的两相回路冷却系统HTPL;文献[6]和[8]研究了AMS-02的热控系统(Tracker Thermal Control System, TTCS),这种TTCS系统是唯一一个用在航天飞行器上的机械泵驱动的两相流冷却系统,为防止两相流循环系统内驱动泵发生汽蚀现象,应在泵的入口处对工质进行液化处理或控制储液罐温度以保证工质处于液态。如果工质液化不彻底,系统运行稳定性就会受到影响。
为解决此类问题,本文研制了一种往复式两相流冷却系统,以保证机械泵辅助两相流系统更加稳定可靠。
1 往复式两相流冷却系统原理
往复式两相流冷却系统主要包括冷凝段A、冷凝段B、蒸发段、往复驱动泵及驱动挡板,其原理见图1。

图1 两相MPCL试验系统原理图
1.1 运行方式
蒸发段位于2个冷凝段中间,由往复驱动泵驱动系统内工质在蒸发段和2个冷凝段之间作往复运动,利用工质的相变实现系统冷却。
1.2 主要特点
该往复式两相流冷却系统通过两相工质在系统内作往复运动实现热量传递,两相工质与驱动器件无接触,永远不会发生汽蚀现象,从而保证了系统的快速启动,可靠性高。
2 试验系统设计
依据上述原理搭建了试验系统,系统模型如图2所示。下面对试验平台各主要部分进行介绍,包括机械泵的组成和运行控制、蒸发器和冷凝器的设计、工质的选择、温度采集方案和热电偶的布置。其中蒸发段即为需要控温的器件,冷凝段可采用风冷或水冷进行二次冷却。

图2 两相MPCL试验系统试验模型
系统的启动过程大致为:整个系统运行起来后,机械泵(即直线推杆和波纹管)驱动管内的工质。工质在蒸发段吸收热量转为气态,之后依靠机械泵将冷凝A段液态工质推进到蒸发段,原蒸发段的气体流到冷凝B段进行冷凝液化,液化完成后由机械泵推到蒸发段进行蒸发。工质往复运行,将蒸发段热量带走。
2.1 机械泵的组成和运行控制
为了实现往复式运动,将直线推杆和波纹管组合成往复式机械泵。波纹管有2个,通过驱动挡板隔开,直线推杆通过推动驱动挡板来实现两边波纹管的拉伸和压缩。该组合方式可实现冷却工质与机械泵的完全隔离,保证机械泵运行的可靠性。
机械泵的驱动和往复控制主要由稳压稳流电源和欧姆龙定时器完成。可通过电流控制,确定机械泵驱动的速度;可依据机械泵驱动的速度,确定正向和反向的运动时间,控制机械泵的往复运动。
2.2 管径计算
根据脉动热管的相关理论[9],在真空状态下,管径只有足够小,在充液后,表面张力才能使气塞和液塞共存。最大管径的计算公式为
(1)
式中:σ为液体工质的表面张力;ρ为液体工作介质密度;g为重力加速度。
由式(1)可以得出:当系统的最小管径为8 mm(管路的最小内径为8 mm)、工质为丙酮时,充液后,液态工质在管内是连续分布、汽液分层的。
2.3 蒸发器和冷凝器的设计
在本实验系统中,蒸发器和冷凝器都采用冷板。蒸发器采用电阻模拟热源,其示意图如图3所示。冷凝器有2个,通过同一个二次冷却装置进行散热,如图4所示。

图3 蒸发器示意图

图4 冷凝器示意图
2.4 工质的选择
工质是传热的载体,因此试验时选择适当的工质尤为重要。工质选择一般会考虑工作温度区间、传热特性、工质与管材的相容性、安全性和经济性等。初步选择丙酮作为试验的工质。丙酮在常温常压(25℃,1个大气压)下的物理性质见表1。

表1 丙酮在常温常压下的热物理性质
从表1可以看出,丙酮能够较好地满足试验的要求,所以本试验的工质将采用丙酮。丙酮具有低毒性和良好的挥发性,因此接触皮肤后应该及时用水冲掉,保持试验室通风。
2.5 温度采集系统
温度采集系统主要由铜-康铜 T型热电偶、安捷伦数据采集仪和工控机组成,其原理如图5所示。
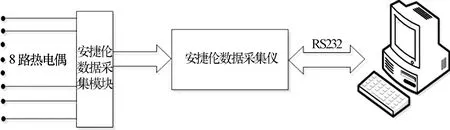
图5 MPCL系统的温度采集方案
测点的分布如图6所示。其中测点1和4对称布置在冷凝器入口(也是出口)处,用来采集从波纹管出来的工质温度。可以通过观察这2处的温度来分析冷凝器的冷却能力。测点5和2布置在蒸发器的入口(也是出口)处,主要用来监测工质进入和流出蒸发器的温度。测点6、7和8布置在蒸发器上,用来采集蒸发器的温度,通过与测点2和5处的温度差值来计算蒸发器的当量换热系数。测点3布置在冷凝器1上,其位置和测点1相对。测点3处的温度采集比较重要,通过和测点2处的温度比较,来分析管路中工质的流动情况。

图6 测点的分布
3 试验基本步骤
在试验台搭建完成后,进行试验的准备工作,包括检漏、抽真空和充液(指充灌一定比例的工质)。
在顺时针循环中,机械泵驱动工质顺时针流动时,工质经过冷凝器A到达蒸发器,在蒸发器端热量通过两相传热被带走,在蒸发器的出口处,会有一定比例(比例大小根据热负载不同而有所不同)的气态工质在经过冷凝器B时被冷凝成液态释放出热量。当机械泵驱动工质逆时针循环时,冷却过程和顺时针类似。这样循环往复,不断地通过工质将蒸发器的热量传递到冷凝器处排散出去。
试验进行了多组比较,包括不同充灌率、不同发热功率和不同循环周期,温度采集系统记录了各状态下的温度曲线变化。
4 试验结果讨论
4.1 不同充灌率下的启动
由机械泵驱动的两相流系统不存在CPL和LHP启动失败的问题,但是仍然存在着一个循序渐进的启动过程。因此,其启动的基本特点(如稳定性、启动时间和启动条件)值得深入研究。
图7~图11是在不同充灌量(充灌量分别为140 ml、180 ml、200 ml、220 ml和260 ml,对应的充灌率分别为43%、55%、61%、67%和79%)情况下的启动情况,初始热负载是100 W,推杆周期是6 s。测点3测试的是冷凝器入口的温度,温度曲线上下波动,表示推杆推动管内的工质来回运动,温度波动的周期和推杆运动周期保持一致。测点7和测点6测试的是蒸发器的温度,两者对称布置,当曲线趋于水平时,说明系统达到稳态。测点8测试的是蒸发器上加热片的温度,所以温度最高。

图7 灌液140 ml时的启动曲线
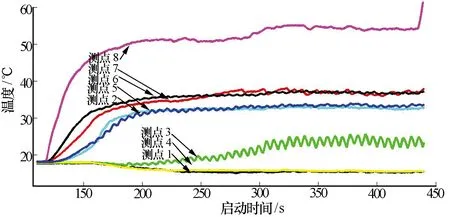
图8 灌液180 ml时的启动曲线

图9 灌液200 ml时的启动曲线

图10 灌液220 ml时的启动曲线

图11 灌液260 ml时的启动曲线
MPCL系统启动的主要性能指标有温度脉动、启动时间、往复周期和稳态温度。从图7~图11的曲线可以看出,以测点8的温度为准,充灌量为140 ml和260 ml时,启动时蒸发器上的温度脉动较大。若充灌率过大,机械泵推动的流体惯性就大,直线推杆换向时流体和波纹管挡板冲击会引起系统内流体的强烈波动。若充灌率过小,流体的影响就小,热流影响就会相对增大,热流的影响会使蒸发器温度升高,当达到一定温度后,工质相变率增加,蒸发器温度就会下降。所以充灌率过小和过大都会导致强烈的温度脉动,从而使启动过程不稳定。
将充灌体积和启动时间的关系描绘成如图12所示的曲线,可以看出在200 ml的充灌体积时,充液率约为61%,启动时间是最短的。系统的启动是热流扰动和机械泵驱动综合作用的结果。当充灌体积大时,机械泵驱动作用强,但是热流扰动作用弱;当充灌体积小时,机械泵驱动作用弱,但是热流扰动作用强。对于本试验系统,在充灌率为61%时,机械泵和热流的综合扰动作用是最大的。

图12 充灌体积与启动时间关系
在成功启动后,系统进入了初始稳态。在不同的充灌体积下,系统的初始稳态温度有所不同,这里的稳态温度指的是蒸发器(测点7)的温度。图13反映了初始稳态温度和充灌体积的关系。在充灌量为140~220 ml时稳态温度相差不大。

图13 充灌体积和初始稳态温度的关系
在充灌量过大或者过小的情况下,稳态温度会明显升高。这是因为充灌率小时,工质体积小,工质汽液比大,超出饱和温度,导致系统过热而被烧干;充灌率大时,工质多,汽液比小,液体无法汽化,仅为单相液体传热,换热系数大大降低,也导致工质温度升高。
在综合考虑启动过程的温度脉动、启动时间和初始稳态温度的情况下,在本试验方案中,充灌率为61%(充灌量为200 ml)时启动性能是最优的。
4.2 稳定运行特性分析
在任何一个冷却系统中,热负载都是变化的,因此冷却系统对于热负载的适应能力是很重要的。适应能力的评判标准是当平衡破坏后再次达到平衡的过渡时间和整个转变过程的稳定性。
图14为充灌量为200 ml时,在系统达到平衡后,每次增加功率50 W时温度的变化曲线。放大图形显示可以看出,图上过渡时间约为20~30个采样点(每2 s采集1次数据,实践中就是40~60 s,为便于后面对试验进行描述,均使用采样点数据作为时间)。在这个变化过程中,温度是稳定上升的,没有出现温度脉冲现象。其原因是在目前的工作状态下,蒸发器内既有液态的工质(且这些液态工质处于过冷态),也有气态的工质,由于液态工质的热惯性相对较大,过冷态的工质需要吸收一定热量才能达到饱和态,所以不可能出现温度脉冲。温度脉冲对电子设备有很大的潜在危害,甚至能直接烧坏电路芯片,但是在汽液混合的两相流系统内,不会出现这样的情况。由于蒸发器内存在相变冷却,在短时间内汽化潜热会吸收很大部分热量,因此增加的热量会在短时间内被带走,达到一种新的平衡。

图14 200 ml热负载变化的温度曲线
在120 s处加负载100 W时,蒸发器温度稳步上升。在430 s处增加负载50 W时,测点8的温度上升较大,而测点6和7的温度变化不大。在570 s处再次增加负载50W时,平衡后,测点8的温度已经超过90 ℃。加热片的安全温度不超过100 ℃,为了安全起见,没有继续加负载。650 s后曲线升起后又突降,其原因是继续增加负载后,发现温度超过了安全值,立即采取了关电措施。测点8是贴在加热片上的,每次增加负载后,测点8的温度响应快,温度上升大。由于蒸发器具有热惯性,因此测点6和7的温度曲线变化平缓。在整个过程中,测点3的曲线波动越来越大,说明系统内的工质摆动起来,发生了强烈的两相变化。
MPCL系统的最大热负载为200 W,最大热流密度为9.26 W/cm2,温度脉动大,系统的传热效果较差,有待改进。传热效果差的原因主要在于热源的损坏和布置不合理以及机械泵的驱动能力不足。
4.2.1 热源的损坏和布置不合理
由于加热片不能承受超过100 ℃的温度,因而在试验中不断被烧坏,致使蒸发器受热不均。同时,在试验时,加热片是贴在蒸发器的上表面的,而系统充液后,液态丙酮会在蒸发器内部的下表面,热量需传导至下表面才能加热液态丙酮,因而实际的热流密度会更低。由测试可知,上下两表面的温差为10 ℃左右。显然,让热源紧贴在蒸发器的底部,传热效果会更好。
4.2.2 机械泵的驱动能力不足
机械泵的驱动能力可以通过波纹管推动的相对体积来表示。系统的总体积为328 ml,波纹管的总体积约为57 ml,在实际运行时,一边压缩,另一边伸长,估算波纹管的伸缩率为60%,则波纹管推动的体积仅为34.2 ml,可以计算出波纹管的相对驱动能力为10.4%。所以在有热负载时,蒸发器内蒸汽和高温液体不能被完全置换出来,这部分高温液体会在蒸发器内随着机械泵的来回驱动循环加热蒸发器。因此在热负载达到一定程度时,传热效果迅速恶化,温度偏离平衡,出现了过高温度。
5 结束语
本文设计了一种新型往复式机械泵驱动两相流系统,并通过分析系统在不同充灌率下的启动和运行性能,确定了影响系统冷却性能的因素。从试验数据可以看出,系统的启动受充灌量、机械泵的驱动能力和热负载的影响。在其他条件不变的情况下,充灌量为200 ml(充灌率为61%)时,启动温度脉动小,时间最短,稳态温度较低。在不同的充灌率下,系统的最大热负载为200 W,最大热流密度为9.26 W/cm2,温度波动大,传热效果较差。其原因是机械泵驱动能力不足,热源运行不稳定且布置不合理。因此该试验方案需要从改善热源和提高机械泵驱动能力2方面进行改进。
该技术的主要优势在于:系统简单,体积小,重量轻,可靠性高;环境适应性好,可以在机载振动、冲击下应用;能耗低,比普通液冷装置低一个数量级;是一种极具潜力的传热方式,在星载和机载电子设备热设计领域有广阔的应用前景。
[1] FURUKAWA M N T J. Static/dynamic analysis for pumped two-phase fluid loop control[C]// The 32nd Thermophysics Conference, Tokyo, Japan: 1997.
[2] YURI V F, VICTOR V B. Two-phase cooling system with a jet pump for spacecraft[J]. Journal of Thermophysics and Heat Transfer, 1994, 9(2): 285-291.
[3] BIRUR G C, BHANDARI P. Mars pathfinder active heat rejection system: successful flight demonstration of a mechanically pumped cooling loop[J]. SAE Transactions, 1998(7): 692-696.
[4] PARK C, VALLURY A. Advanced hybrid cooling loop technology for high performance thermal management[C]// The 4th International Energy Conversion Engineering Conference, AIAA-2006-4059, 2006.
[5] PARK C, VALLURY A, ZUO J, et al. Electronics thermal management using advanced hybrid two-phase loop technology[C]// 2007 ASME-JSME Thermal Engineering Summer Heat Transfer Conference, Vancouver, Canada: 2007.
[6] DELIL A A M, PAUW A, WOERING A A. AMS-2 tracker thermal control system: design and thermal modeling of the mechanically pumped two-phase CO2loop[C]// The 41st AIAA Aerospace Sciences Meeting & Exhibit, Reno, USA : 2003.
[7] VERLAAT B, ROOKHUIZEN H B. Feasibility demonstration of a mechanically pumped two-phase CO2cooling loop for the AMS-2 tracker experiment[J]. Space Technology & Applications National Forum-staif, 2002, 608 (1): 57-64.
[8] DELIL A. Research issues on two-phase loops for space applications[C]// Proceedings of ISAS Symposium on Space Flight Mechanics, Sagamihara, Japan: 2000.
[9] 马永锡, 张红, 庄骏. 振荡热管:一种新型独特的传热元件[J]. 化工进展, 2004(9): 1008-1013.
陈陶菲(1977-), 女, 高级工程师, 主要从事雷达结构总体研究工作。
Experiment of Reciprocating Mechanically Pumped Cooling Loop
CHEN Tao-fei1,XU De-hao1,KE Pan2
(1.NanjingResearchInstituteofElectronicsTechnology,Nanjing210039,China;2.SchoolofEnergyandEnvironment,SoutheastUniversity,Nanjing210096,China)
A completely new MPCL(Mechanically Pumped Cooling Loop) system is introduced in this paper and the experimental platform is set up to make MPCL operate more stably and reliably. In the preliminary experiment, when the system is filled with different filling rates, the start-up time and operation performances are studied. The optimal filling rate is obtained. Meanwhile it is concluded that uneven heat source and insufficient drive capability of the pump lead to the poor performance of the system. So the experimental scheme is optimized from these two aspects. The start-up time is shortened and the operation performance of the system is improved after the heat source is optimized. Based on the optimized heat source, the drive capability of mechanical pump is improved. The system has shorter start-up time, lower steady-state temperature and smaller temperature fluctuation. The system can have larger heat load when it operates and has no temperature pulse when the heat load changes. In a word, the heat transfer capability of the system is improved greatly. According to the experiment, the MPCL system can start up smoothly and operate safely. The equivalent heat transfer coefficient of the system gets very large and temperature uniformity of the system is very good. The experimental result has laid foundation for further study.
reciprocating mechanically pumped cooling loop; temperature uniformity; heat transfer capability
2016-02-25
TK124
A
1008-5300(2016)02-0004-06
