一种视频监控用系留型四旋翼无人飞行器的结构设计*
2016-09-07吴文志
吴 斌,吴文志
(中国电子科技集团公司第三十八研究所, 安徽 合肥 230088)
一种视频监控用系留型四旋翼无人飞行器的结构设计*
吴 斌,吴文志
(中国电子科技集团公司第三十八研究所, 安徽 合肥 230088)
多旋翼无人飞行器容易实现自由起降,机动性好,在军民两用方面有着非常广泛的应用价值。通过分析四旋翼飞行器的飞行原理,文中给出了一种视频监控用系留型四旋翼无人飞行器的结构设计方案。重点阐述了该结构的系统功能与组成、材料的选择及收放式起落架设计。建立有限元模型对该结构在风载荷、旋翼升力及降落冲击工况下的强度进行计算,并根据有限元计算结果对结构进行了优化。结果表明,该结构设计满足技术指标要求。
四旋翼飞行器;结构设计;有限元分析;优化
引 言
近年来,微小型四旋翼无人飞行器以其新颖的结构布局、独特的飞行方式引起了人们广泛的关注。与固定翼机相比,旋翼无人飞行器具有结构简单、可垂直起落、空中悬停、重量轻等优点,在军民两用方面有十分广阔的应用前景,已引起广泛的研究兴趣[1-3]。根据飞行方式,旋翼飞行器可分为自由型和系留型。目前的产品主要集中在自由型多旋翼,主要面向航模爱好者,单块电池仅能支持飞行器滞空15 min左右;而系留型多旋翼飞行器通过系留缆绳实现地面供电和光纤数据传输,具有滞空时间长、数据传输速度快等优点,特别适用于长时间不间断的空中监控和应急通讯[4]。以系留型多旋翼飞行器为平台,搭载多种监控设备可以弥补星载、机载、球载、地面等多种监控设备的不足,具有高机动性、高效能等特点[5-6]。系留型多旋翼飞行器监控系统作为一种新型预警侦查设备,在公共安全领域中发挥的作用日益重要。
本文以系留型四旋翼无人飞行器为研究对象,给出了一种视频监控用折叠式系留型四旋翼无人飞行器的结构设计方案。重点阐述了该结构的系统功能与组成、材料的选择及收放式起落架设计。基于该结构方案,建立了相应的有限元模型,对该结构在风载荷、旋翼升力及降落冲击工况下的强度进行计算,并根据有限元计算结果对结构进行了优化。结果表明,该方案具有方便运输、可快速架设/拆收等特点,结构设计满足技术指标要求。
1 设计原则
结构设计时,遵循如下原则:
1)合理性。作为升空部分设备的安装平台,应满足各部件的连接要求,结构件在关联处能够快速可达,连接可靠,载荷传递方式合理。
2)轻量化设计。设计时,应尽量选用轻质、高强度材料,在保证结构承受各种规定载荷状态下具有足够的刚强度和寿命的前提下,使结构质量尽可能轻。
3)工艺性。结构工艺性的好坏直接影响加工周期和成本。应少用新材料和新工艺,减少材料和紧固件的类型和尽量选用标准件。
4)维修性。合理布置分离面和开口,保证寿命周期内能够快速、可靠地进行维护、检修。
5)美观性。综合运用构图、色彩搭配、光影效果、明暗等方面的知识,构建精美的外观造型,达到良好的视觉效果和工艺美术感染力。
2 结构设计
2.1 系统功能与组成
系留型四旋翼飞行器监控系统是一种基于四旋翼飞行器的升空工作平台,用于搭载光电载荷,对特定区域进行长时间巡视,完成情报收集工作。系统包括地面保障设备、系留缆绳和空中工作平台,如图1所示。

图1 系统工作示意图
地面保障设备包括运输车、发电机、电源模块、测控设备等,保障空中工作平台可靠、持续工作。
2.2 材料的选择
空中平台结构采用不同型号的碳纤维管材和板材搭接而成,各种型材均采用三维编织T300碳纤维复合材料,具有较轻的质量和较高的强度。为了最大程度减轻结构重量,设备舱主体的3层碳纤维板材的厚度依据载荷的大小,从上到下依次为1.5 mm、2 mm、1.8 mm,并设计合理的减轻孔。支撑臂和起落架主要承受弯矩载荷,采用抗弯性能较强的碳纤维管材。任务载荷挂架及辅助竖梁等应力比较大的零件采用质轻强度高的航空铝合金材料7075-T651,不仅可以降低结构的重量,还提高了结构的强度和韧性。
碳纤维复合材料编织的零件在铆接时存在易被压溃和碎裂的现象,为了保证零件间的联接质量,所有复合材料零件均采用铝合金接头搭接。搭接时,为保证装配精度,需配合专用定位工装进行,装配方案见图2。

图2 结构平台总装
2.3 任务载荷和系留缆绳安装
任务载荷为高清摄像机,可覆盖水平360°、俯仰90°的范围,从而实现全方位立体视频监视。依据任务载荷的结构形式及安装接口,将任务载荷吊舱设计成法兰式,如图3所示。任务载荷吊舱上部通过8个螺钉与设备舱连接,底部为系留缆绳支架。任务载荷吊舱采用铝合金7075-T651机加而成,整个吊舱仅105 g,满足轻量化设计要求。

图3 任务载荷吊舱
2.4 收放式起落架设计
起落架是保证四旋翼飞行器安全着陆的关键件,主要作用是吸收并耗散飞行器着陆垂直速度产生的动能,其工作性能的好坏以及可靠性直接影响整机的使用和安全。
在四旋翼飞行器空中飞行时,为了避免起落架遮挡监控设备的视角,需将起落架向上收起。因此,设计时不但要考虑起落架的功能实现,还要设计收放机构,图4为四旋翼飞行器飞行时起落架的收起状态。
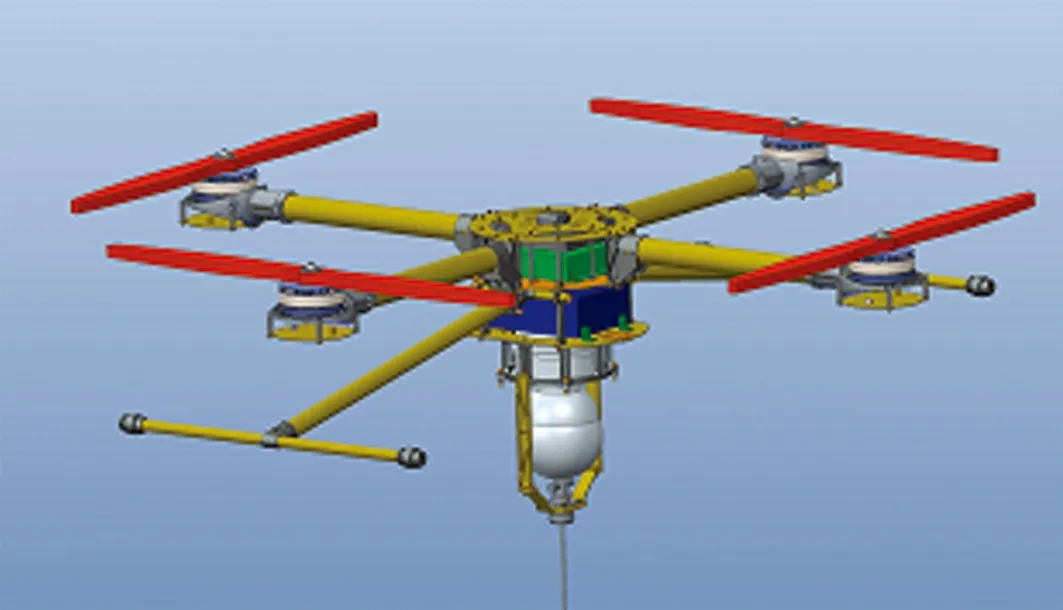
图4 四旋翼飞行器飞行时起落架的收起状态
3 有限元分析
依据四旋翼飞行器的实际应用工况和空中工作平台的具体结构形式,建立有限元分析模型,对该飞行器在风载荷、旋翼升力及降落冲击工况下的结构强度和刚度响应进行了仿真分析。
3.1 结构材料
四旋翼飞行器空中平台结构主要由三维编织T300碳纤维复合材料和航空铝合金7075-T651组成,材料型号及参数如表1所示。

表1 空中平台结构材料型号及参数
3.2 模型载荷
作用在四旋翼飞行器上的外载荷主要有质量载荷、空气动力、旋翼推力和地面冲击载荷,如表2所示。

表2 四旋翼飞行器载荷
3.3 分析结果
借助有限元分析软件对四旋翼飞行器在以下几种极限载荷工况下的强度进行了计算:1)极限风速8 m/s;2)飞行器上升过程中,最大过载2g;3)飞行器降落时承受速度为1 m/s的冲击。
计算结果表明:
1)空中飞行时,平台结构的最大应力位于任务载荷吊舱和系留缆绳支架的连接处,碳纤维编织零件的最大应力位于支撑臂靠近设备舱附近,最大位移位于螺旋桨处,其应力云图及变形云图如图5和图6所示。
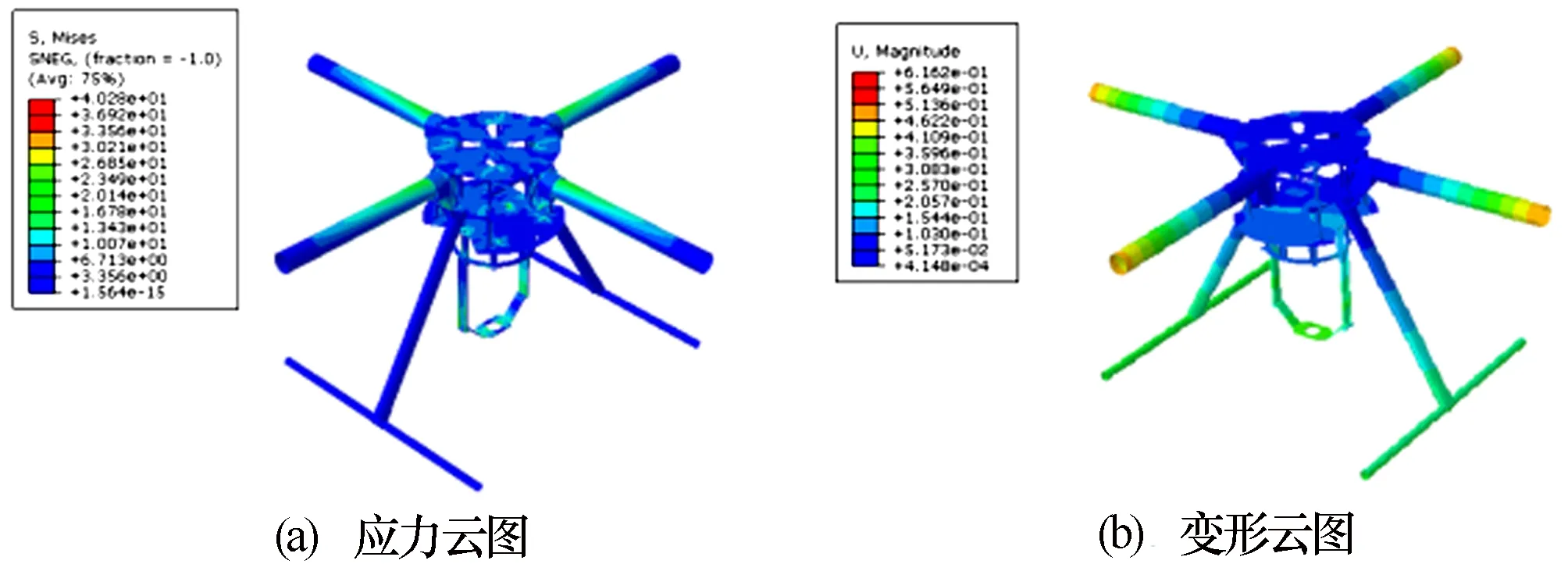
图5 空中飞行时的应力云图及变形云图
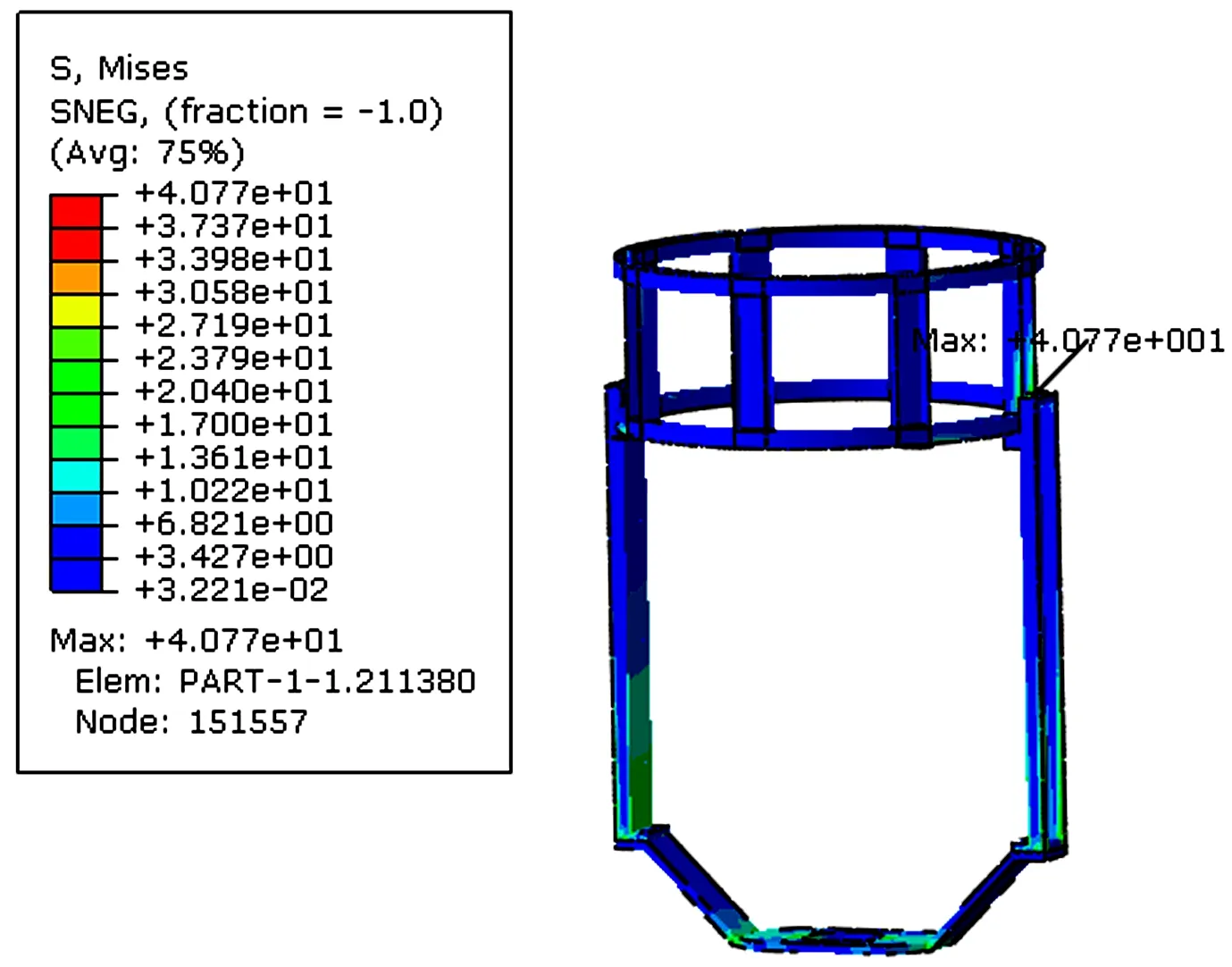
图6 空中飞行时吊舱和支架的应力云图
2)着陆瞬间,平台结构的最大应力位于起落架收放机构上,碳纤维编织零件的最大应力位于设备舱与起落架连接处,最大位移位于起落架与地面接触处,其应力云图及变形云图如图7所示。

图7 着陆时的应力云图
3种工况下的最大应力、安全裕度和位移见表3。

表3 仿真分析结果
4 结构优化
优化前,任务载荷吊舱和系留缆绳支架的材料为航空铝材7075,最大应力σmax为40.8 MPa,铝材强度极限σb=510 MPa,安全系数f取1.5,结构的安全裕度:
(1)
由式(1)可知,任务载荷吊舱和系留缆绳支架的安全裕度过大,可进一步优化。由于两者均为薄壁结构形式,依据应力分布云图合理缩减壁厚。此外,为缩减加工周期和成本,可将材料换为材料参数相同的常规铝合金材料5A06-H112。优化后,最大应力为136.7 MPa,材料强度极限为315 MPa,代入式(1)可得安全裕度为0.53,满足使用要求。
5 结束语
本文详细介绍了一种四旋翼飞行器空中平台结构的设计方案,详细阐述了空中平台的结构形式和工艺实现方法,并根据结构的刚强度有限元分析结果,对平台结构进行了优化。在保证平台结构可靠性的前提下,缩减了加工成本,提高了结构的工艺性能,为四旋翼飞行器的结构设计提供了参考。
[1] 陈军. 四旋翼飞行器自动控制仿真研究[J]. 计算机仿真, 2015, 32(7): 88-91.
[2] 侯永锋, 陆连山, 高尚德, 等. 基于PD算法的四旋翼飞行器控制系统研究[J]. 机械科学与技术, 2012, 31(3): 359-362.
[3] 王伟, 马浩, 徐金琦, 等. 多旋翼无人机标准化机体设计方法研究[J]. 机械设计与制造, 2014(5): 147-150.
[4] 谢启玲. 系留四旋翼无人直升机控制算法研究[D]. 沈阳: 沈阳航空航天大学, 2014.
[5] 高绪, 谢菊芳, 胡东, 等. 四旋翼无人机在柑橘园巡检系统中的应用[J]. 自动化仪表, 2015, 36(7): 26-30.
[6] 王建敏. 旋翼无人机变速下的多图像目标监测仿真[J]. 计算机仿真, 2014, 31(11): 79-82.
吴 斌(1983-),男,硕士,工程师,主要从事传感器飞行器结构设计工作。
Structure Design of a Tethered Quad-rotor Unmanned Aerial Vehicle Used for Video Surveillance
WU Bin,WU Wen-zhi
(The38thResearchInstituteofCETC,Hefei230088,China)
Multi-rotor unmanned aerial vehicle (UAV) has wide applications in the military and civil fields, due to its merits such as taking off and landing vertically, good maneuverability. In this paper, the structure design scheme of a tethered quad-rotor UAV used for video surveillance is proposed based on the flight principle of quad-rotor UAV. The function and compostion, material selection, the design of retractable landing gear of the UAV are mainly discussed. Finite element models are created to compute the structure strength under the working conditions of wind load, rotor lift and landing impact. Structure optimization is carried out according to the finite element analysis. Results show that the structure design satisfies the technique requirements.
quad-rotor unmanned aerial vehicle; structure design; finite element analysis; optimization
2015-11-24
V279+.2
A
1008-5300(2016)02-0039-03
