X波段有源相控阵雷达子阵驱动延时组件的设计与实现
2016-08-29李树良朱润月
李树良,朱润月,刘 杨
(1. 南京电子技术研究所, 南京 210039; 2. 酒泉卫星发射中心, 甘肃 酒泉 735000)
X波段有源相控阵雷达子阵驱动延时组件的设计与实现
李树良1,朱润月2,刘杨1
(1. 南京电子技术研究所,南京 210039;2. 酒泉卫星发射中心,甘肃 酒泉 735000)
分析了X波段有源相控阵雷达子阵驱动延时组件的功能及其工作原理,介绍了驱动延时组件高精度与小型化设计的实现方式。针对任务需求,设计并实现了一种集成五位延时、收/发增益补偿功能的驱动延时组件。根据实测结果,该驱动延时组件接收增益为16 dB±1 dB,发射功率为27.5 dBm±0.5 dBm,延时切换时幅度精度≤±0.8 dB,相位精度≤±5°。
子阵;驱动延时;高精度;小型化
0 引 言
随着雷达技术水平的提高,相控阵雷达的宽带化成为目前发展趋势。与传统窄带雷达相比,宽带雷达具有精度高、抗干扰能力强等优点。雷达瞬时带宽的提高,会产生宽带大扫描角度带来的波束空间指向色散问题。为解决这一问题,需要对相控阵天线接收/发射信号进行延时补偿。若对每个天线通道信号均进行延时补偿,会较大程度上增加天线阵面的成本。在子阵级加入延时线,即可对波束指向精度有着明显提高,又能兼顾延时线的应用成本[1-3]。
目前国内外文献中,实现延时补偿主要有微带传输线[3-4]、慢波传输线[5]、左手传输线[6]等方式。微带传输线方式结构简单,易于实现,但体积较大不利于集成。慢波、左手传输线方式体积较小,但带宽有限,带内幅度平坦度较差。
本文采用微波多层工艺,选择多层带状线传输线方式设计延时电路,在较小体积内实现了X波段4 GHz宽带延时,并具备较好的带内幅相特性。此外,本文将发射驱动、接收增益补偿与延时电路一体化设计,一方面可以补偿宽带大角度扫描带来的波束空间指向色散;另一方面补偿延时带来的损耗,有利于阵面收/发链路电设计。该组件输出功率≥27 dBm、接收增益≥15dB,可实现步进0.1ns,延时量为0~3.1 ns,具备一定的实用性。
1 子阵驱动延时组件的功能
传统的窄带波束形成器中,每一个传感器的信号都乘以复数加权系数而形成阵列天线的输出信号。当信号带宽增加时,由于天线修正的相位和频率不构成函数关系,窄带波束形成器的性能开始恶化,所以,对于信号传输中不同的频率成分来说相位响应会有所变化[7]。因此,处理宽带、超宽带阵列信号时必须将每个天线单元收发信号之间的时延差补偿到合理的范围。以接收天线为例,如图1所示。
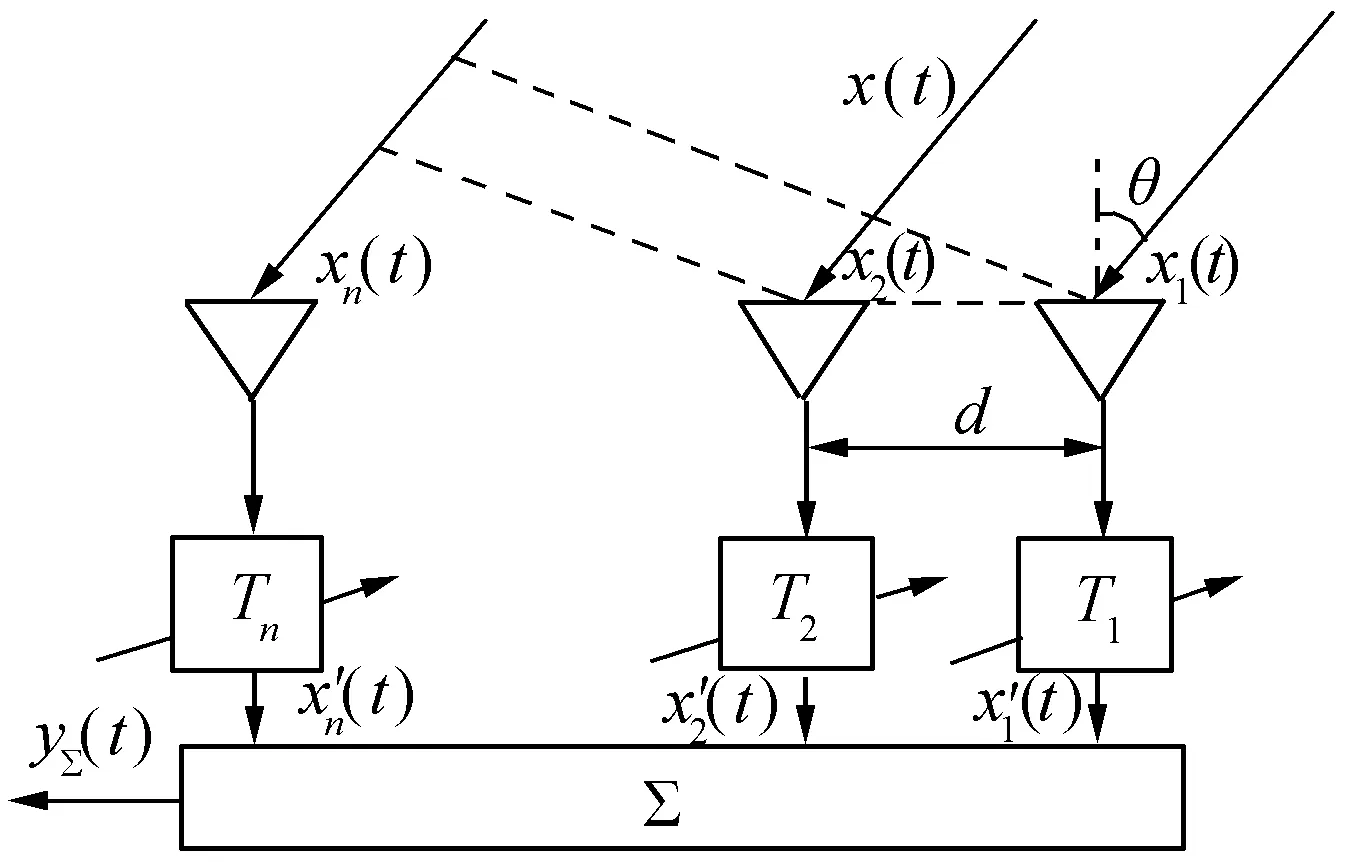
图1 引入延时线补偿后的阵列天线示意图
假设第n路天线阵元的接收信号为xn(t),由于存在时延,则
(1)
式中:τn为第n路天线接收信号时延;d为阵元间距;θ为阵元垂直方向与接收信号夹角;n=1,2,…,N,N为阵元总数量。
对每个天线接收信号进行时延补偿,去除时延值
(2)
则补偿后的信号为
x1(t-T0)
(3)
可以求得合成信号为
(4)
因此,时延补偿技术可以消除阵列天线孔径效应引起的波束色散并补偿孔径渡越时间。在实际工程应用中,随着对延时总量要求的增加,延时线的体积、成本与电损耗不可忽略。若对每个通道均进行延时补偿,会较大程度上增加天线阵面的成本。因此,一般在子阵级加入延时线。同时,为了兼顾收/发链路电平设计并补偿延时线带来的损耗,将延时电路与收/发放大电路集成设计,形成子阵驱动延时组件。
子阵驱动延时组件在天线阵面中的位置与功能,如图2所示,由阵列天线接收到的信号经T/R通道放大后通过合成网络,然后进入子阵驱动延时组件进行增益补偿与延时,一定数量的有源子阵接收信号合成后进入接收机。发射信号通过阵面网络分配至各个有源子阵,然后进入驱动延时组件进行信号放大与延时,再分配至每个T/R通道放大后由天线辐射而出。

图2 天线阵面示意图
2 子阵驱动延时组件的原理与设计
根据天线阵面的应用需求,对子阵驱动延时组件的设计提出的要求有:
1)驱动延时组件需实现五位延时功能,接收增益≥15 dB,发射输出功率≥27 dBm;
2)驱动延时组件需具备较高的延时精度,延时幅度精度≤±1 dB,延时相位精度≤±12°;
3)驱动延时组件体积尽可能小,以便于子阵集成与装配。
2.1组件原理设计
根据子阵驱动延时组件的设计要求,我们设计的驱动延时组件原理图,如图3所示。子阵驱动延时组件集成了发射驱动、接收增益补偿与五位延时功能。为满足接收增益与发射输出功率的要求,发射链路采用了三级功率放大器,接收链路采用两级低噪声放大器。同时,在组件内部电平分配时,将放大器采用延时电路隔开。一方面可以拉大放大器之间的物理间距;另一方面可避免增益电路过于集中,防止自激,增加组件的稳定性。

图3 子阵驱动延时组件原理图
五位延时电路主要由可以通过开关切换的参考/延时态位组成,共有1λ、2λ、4λ、8λ、16λ五种态位。以中心频率f0=10 GHz为例,每增加一个λ,电延时量增加1/f0,即0.1 ns。延迟线工作在基态时,五个态位全部选择走参考支路,此时延时量记为T0;工作在全延时态时,五个态位全部选择走延时支路,此时时间延迟为T0+3.1 ns。因此,通过开关选通不同路径,可以实现步进0.1 ns、延时量T0+(0~3.1 ns)的时间延迟。
2.2组件性能设计
延时开关切换时,延时电路产生的时延是由参考态与延时态的路程差来实现的,当时延量提高时,路程差也需对应增加,即延时态的传输电长度也需增加。这会带来两个问题:1)参考态与延时态的插入损耗不同;2)由于材料与加工带来的误差也随之增加,这将使延时相位精度较难保证满足指标。为此,本文设计了衰减电路补偿参考/延时态之间的插损不一致性,并采用调相电路用于保证延时相位精度,如图4所示。

图4 衰减与调相电路在驱动延时组件中的应用
驱动延时组件内部包含开关二极管、电感、电容、放大器等射频元器件,之间互相级联会造成内部驻波的叠加。因此,为了保证在较宽的带宽内具备较好的幅度、相位带内平坦度,需要对组件内部电路进行优化。图5为一切二开关与端口水平过度的级联仿真结果,通过电路匹配与优化,可以将驻波控制在1.5以下。

图5 级联仿真结果
2.3组件实现工艺
驱动延时组件的小型化设计采用了微波多芯片组装技术与微波多层印制板工艺。微波多芯片组装技术包含微波多芯片贴装技术与微波高密度互联技术。驱动延时组件内部包含了延时开关、收发开关、放大器芯片、控制芯片、驱动芯片、环行器等多种元器件,因此,微波多芯片组装技术使驱动延时组件的设计具备较高的一致性与可生产性。微波多层印制板工艺将多块印制板黏合/层压成一体,采用金属化孔实现各层之间互联,可以有效地减少电路设计面积。五位延时电路的小型化设计采用的微波多层板由五层介质层压而成,之间采用半固化片黏合。如图6所示,延时电路采用了两层带状线与一层微带线设计,可以较大程度节省设计面积。
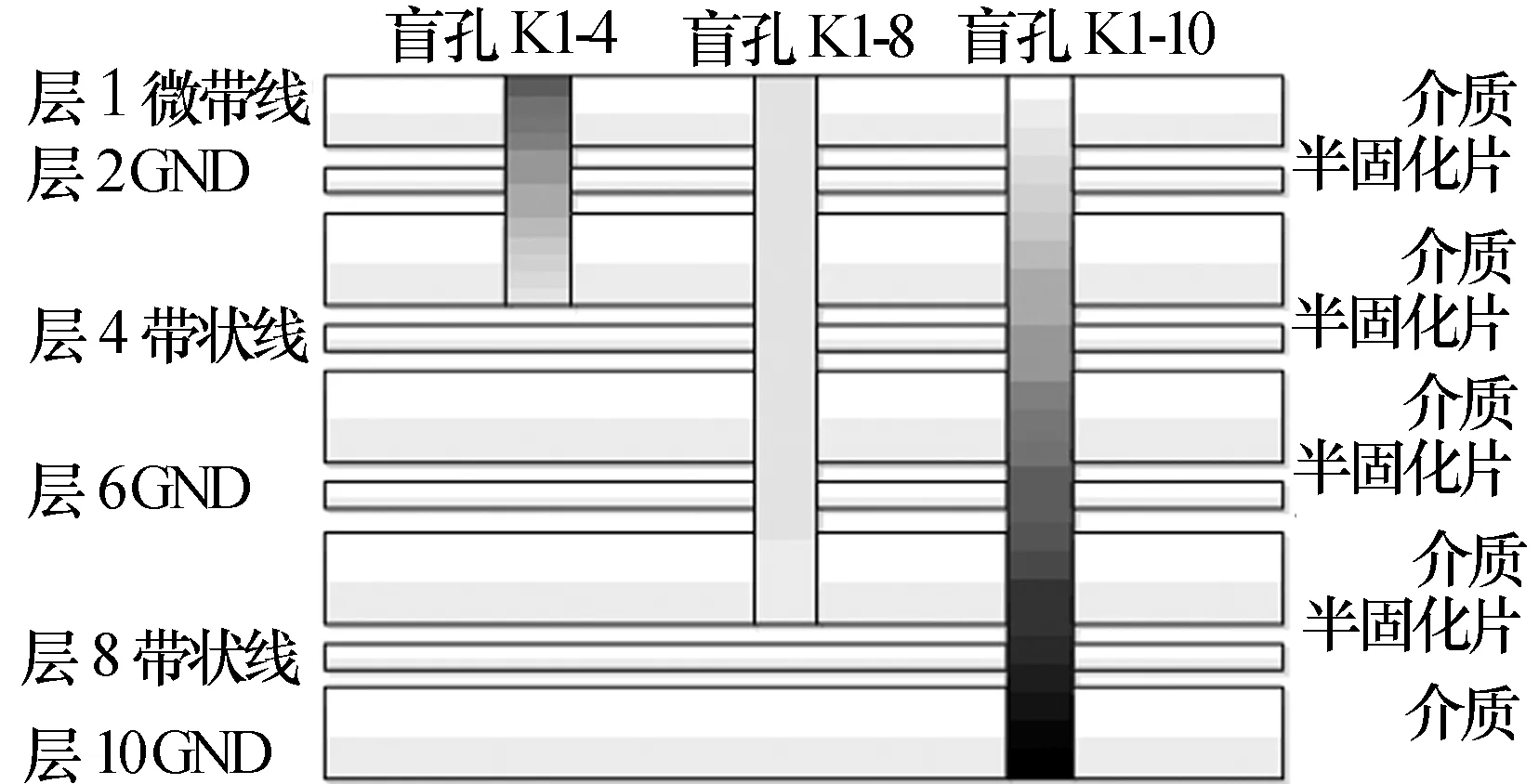
图6 延时电路的微波多层结构
3 子阵驱动延时组件的实现与测试
子阵驱动延时组件的实物图如图7所示,组件本体尺寸102 mm×45 mm×10 mm,重量≤120 g。

图7 驱运延时组件实物图
对驱动延时组件各延时状态的接收增益与发射功率进行了测试,测试结果如图8~图10所示。根据测试结果可见驱动延时组件满足指标要求。接收增益为16 dB±1 dB,发射功率为27.5 dBm±0.5 dBm,延时切换时幅度精度≤±0.8 dB,相位精度≤±5°。

图8 各态接收增益实测曲线

图9 各态移相精度实测曲线

图10 发射输出功率实测曲线
4 结束语
本文分析了子阵驱动延时组件在天线阵面中的功能,并根据阵面应用需求设计了一种集成五位延时、接收增益补偿与发射功率放大的驱动延时组件。该组件具备较为平坦的带内特性、较高的延时幅相精度与小型化的特点,已应用于X波段舰载有源相控阵雷达中。
[1]张金平,李建新,孙红兵. 宽带相控阵天线实时延时器分级应用研究[J]. 现代雷达,2010,32(7): 75- 78.
ZHANG Jinping, LI Jianxin, SUN Hongbing. A study on layered scheme of real-time delayers for the wideband phased array[J]. Modern Radar, 2010, 32 (7): 75-78.
[2]WILDEN H, SAALMANN O, SCHMIDT A, et al. A pod with a very long broadband time steered array antenna for PAMIR[C]// European Conference on Synthetic Aperture Radar. Friedrichshafen: IEEE Press, 2008: 1-4.
[3]WEIB M, SAALMANN O, ENDER J H G. A wideband phased array antenna for SAR application[C]// European Microwave Conference. Munich: IEEE Press, 2003: 511-514.
[4]梅亮,张华,王继财. 共面波导交指慢波延迟线设计[J]. 固体电子学研究与进展,2012,39 (5): 489- 492.
MEI Liang, ZHANG Hua, WANG Jicai. Design of coplanar waveguide interdigital slow wave delay line[J]. Research&Progress of Solid State Electronics, 2012, 39 (5): 489-492.
[5]ZHANG J, ZHU Q, JIANG Q, et al. Design of time delay lines with periodic microstrip line and composite right/left-handed transmission line[J]. Microwave and Optical Technology Letters, 2009, 51 (7): 1679-1682.
[6]裴培,韩玉辉,王鹏毅. 超宽带阵列天线的接收波束形成研究[J]. 无线电工程,2009,39(5): 18- 20.
PEI Pei, HAN Yuhui, WANG Pengyi. Study on receiving beam forming of ultra wideband array antenna[J]. Radio Engineering of China, 2009, 39(5): 18-20.
[7]李敏慧,江居德,朱力. 实时延迟线性能对SAR成像质量的影响分析[J]. 中国电子科学研究院学报,2007,6(6): 536-539.
LI Minhui, JIANG Jude, ZHU Li. Analyses of effect of real-time delay line performance on SAR imaging quality[J]. Journal of China Academy of Electronics and Information Technology, 2007, 6(6): 536-539.
李树良男,1985年生,工程师。研究方向为雷达天线馈电技术。
朱润月男,1984年生,雷达技师。研究方向为雷达阵面技术。
刘杨女,1982年生,高级工程师。研究方向为雷达天线收发组件技术。
Design and Realization of an X-band Subarray Drive Time-delay Module for Active Phased Array Radar
LI Shuliang1,ZHU Runyue2,LIU Yang1
(1. Nanjing Research Institute of Electronics Technology,Nanjing 210039, China) (2. Jiuquan Satellite Launch Center,Jiuquan 735000, China)
The function and working principle of the subarray drive time-delay module, applied in X-band multifunctional active phased array radar are analyzed. The solutions for high accuracy design and miniaturization of drive time-delay module are also introduced. According to the task requirements,a drive time-delay module is designed and realized, integrating 5-bit time-delay, receive and transmit gain compensation. According to the measured results, the drive time-delay module achieves the receive gain within 16 dB±1 dB, transmit power within 27.5 dBm±0.5 dBm,time-delay amplitude accuracy better than±0.8 dB and time-delay phase accuracy better than ±5°.
subarray; drive time-delay module; high accuracy; miniaturization
李树良Email:shuliangli1985@126.com
2016-03-22
2016-05-23
TN959.71
A
1004-7859(2016)07-0052-03
·天馈伺系统·
DOI:10.16592/ j.cnki.1004-7859.2016.07.013
