基于HLA的弹载SAR快速数字仿真与评估系统
2016-08-29陈阳春孙清洋郁文贤
陈阳春,孙清洋,舒 汀,唐 斌,郁文贤
(上海交通大学 上海市智能探测与识别重点实验室, 上海 200240)
·总体工程·
基于HLA的弹载SAR快速数字仿真与评估系统
陈阳春,孙清洋,舒汀,唐斌,郁文贤
(上海交通大学 上海市智能探测与识别重点实验室,上海 200240)
为克服通常情况下在单台计算机上分时、分步完成整个弹载合成孔径雷达(SAR)系统仿真的耗时与繁琐,文中基于高级体系结构(HLA)的独有架构,采用图形处理器(GPU)作为处理器,搭建了包括主控、航迹与姿态、目标与场景建模、回波、干扰、SAR成像处理、仿真评估多个联邦成员在内的弹载SAR快速数字仿真与评估系统。对系统性能进行多组数据实测仿真与评估分析,相对传统方法将性能提升数个量级,验证了该系统的正确性与高效性。
合成孔径雷达;数字仿真;高级体系结构;联邦;运行支撑环境;图形处理器
0 引 言
合成孔径雷达(SAR)自身所具有的独特的全天时、全天候工作和高分辨率成像的特性,使得SAR系统在民用和军用方面都发挥了极其重要的作用。与常规机载和星载SAR不同,弹载SAR有更快的平台飞行速度和更强的机动性。弹载SAR在外场挂飞前,一般需要经过严格的数字和半实物仿真测试来达到降低风险的目的,弹载SAR系统的数字仿真是其中十分重要的一个环节。SAR原始数据主要有两种获取方法:一种是利用实际飞行生成,数据真实,但是费用较高;另一种是利用数字仿真产生模拟数据,这种方法方便且节约成本,然而在分布式大场景的应用条件下,计算量是非常大的。高级体系结构(HLA)是美国国防部建模仿真办公室(DMSO)提出的下一代仿真技术规范,通过计算机网络使分散分布的各仿真部件能够在统一的仿真时间和仿真环境下协调运行,且可以重复使用。本文设计的弹载SAR快速数字仿真与评估系统基于分布式数字仿真HLA[1-3]和高性能GPU[4]并行计算技术,通过相关的数学模型来快速仿真典型大场景地形和目标的弹载SAR回波数据和成像的全过程[5]。此外,该系统还可以通过灵活的添加联邦成员来增加软件的功能。这对于弹载SAR系统的设计和弹载SAR信号处理算法的研究与分析具有非常重要的应用价值。
本文首先对数字仿真与评估系统中的HLA架构及各联邦成员的实现进行介绍;然后,分析仿真系统的实现并展示系统软件界面;最后,对仿真数据进行处理,验证数字仿真与评估系统的有效性。
1 数字仿真与评估系统架构
1.1高级体系结构
HLA是DMSO于1995年10月在制定的建模与仿真计划(MSMP)中,提出的未来建模仿真的标准技术框架,是在面向对象分析与设计的基础上划分成员,构建仿真联邦的技术。联邦指拥有某一特定仿真目的的分布仿真系统,由相互作用的联邦成员组成。联邦成员往往是参与联邦的应用程序,由若干个相互作用的对象(类)组成。HLA标准不考虑联邦成员的具体实现,即如何由对象构建成员,而是假设已有成员的情况下,考虑如何创建联邦、如何进行联邦集成以及如何设计联邦成员之间的交互以达到仿真的目的。
HLA仿真逻辑结构如图1所示,主要包括各联邦成员、运行支撑环境(RTI)接口模块、RTI、底层通信支持系统,HLA仿真的关键在于联邦的各个联邦成员的运行、管理和互操作性,以及RTI的构建。

图1 HLA仿真逻辑结构
本文所述数字仿真与评估系统由主控、航迹与姿态、回波、干扰、目标与场景建模、SAR成像处理、仿真评估等联邦成员组成,并根据联邦成员各自的特点将其分配到多台仿真机上,如图2所示。

图2 数字仿真与评估系统分布式设计
1.1.1对象类/交互类的设计
HLA的开发主要包括联邦开发以及联邦成员的具体实现,而联邦开发主要指对象模型/交互模型(FOM/SOM)、联邦执行数据文件(FED)的开发。HLA FOM的主要功能是为联邦成员之间进行数据交换提供公共的、标准化的格式,描述了将在仿真过程中参与的各联邦成员信息交换的对象类、对象类属性、交互类、交互参数的性质。HLA SOM是针对单一联邦成员而言的,它描述了联邦成员对外公布的或订购的对象类、对象类属性、交互类、交互参数的特性,这些特性反应了联邦成员参与联邦运行时的能力。而HLA FED是FOM开发的结果,是所有联邦成员间为交互目的而达成的“协议”。针对弹载SAR快速数字仿真与评估系统联邦成员特点,设计FOM/SOM如表1、表2所示。

表1 FOM/SOM对象类设计

表2 FOM/SOM交互类1)设计
注:1) MC为主控,TA为航迹与姿态,E为目标与场景,J为干扰,I为SAR成像处理,SE为仿真评估,A为所有联邦成员。
1.1.2联邦成员仿真逻辑结构
根据表1和表2中FOM/SOM设计,制作联邦成员仿真逻辑结构图,如图3所示。主控创建并加入联邦执行后,通过交互类类对象初始化各联邦成员后,第一次到达同步点。同步完成后,航迹与姿态、目标与场景建模、回波联邦成员和干扰联邦成员协同运行(期间需多次同步),模拟弹载SAR飞行过程中航迹、姿态、照射目标场景区域的变化,并生成相应的回波和干扰回波。在回波、干扰回波计算完毕后,由回波、干扰联邦成员向SAR成像联邦成员发送交互参数实例,通知其接收回波、干扰回波数据,并将回波、干扰回波数据发送给SAR成像联邦成员成像。成像结束后,SAR成像联邦成员通过交互参数通知仿真评估联邦成员接收成像结果,待评估结束后,仿真评估联邦成员通知各个联邦成员退出联邦执行并予以销毁。

图3 联邦成员仿真逻辑结构图
1.2联邦成员设计
1.2.1主控联邦成员
主控联邦成员控制HLA仿真的整个进程。主控仿真机控制软件包含其他各联邦成员的参数配置界面、主控服务器的IP地址和端口号配置界面、以及与各联邦建立网络通信的控制对象选择与系统控制配置界面。
在HLA仿真开始前,在主控仿真机控制软件上配置好各联邦成员初始化参数,并建立与各联邦的网络通信链路,创建并加入联邦执行,然后初始化和发布航迹与姿态、目标、虚假目标、场景、虚假场景、回波、干扰回波交互类参数,设置时间管理策略为受限。
1.2.2航迹与姿态联邦成员
在主控联邦成员创建联邦执行后,航迹与姿态联邦成员加入,并订购航迹与姿态交互类,公布航迹与姿态对象类,注册对象类实例,设置时间管理策略为受限且控制。
航迹与姿态联邦成员跟主控联邦成员一样被部署在主控仿真机上,在HLA仿真过程中产生或直接加载实际记录的弹道、姿态信息。生成的弹道数据包括无误差数据和有误差数据,其中,有误差数据是人为的添加了气流扰动模型和惯导扰动模型。气流扰动模型包括随机常数扰动、高斯白噪声扰动、正弦扰动等扰动量,惯导扰动模型包括线性积累扰动、高斯白噪声扰动等扰动量,分别用来模拟实际弹载SAR飞行过程中,由于气流的影响导致的颠簸和惯性导航误差积累导致的航线偏离。
1.2.3目标与场景建模联邦成员
在主控联邦成员创建联邦执行后,目标与场景联邦成员加入,并订购航迹与姿态对象类和交互类、目标与场景交互类,公布目标对象类,注册对象类实例,设置时间管理策略为受限且控制。
目标与场景联邦成员在HLA仿真过程中,根据订阅主控的目标、虚假目标与场景、虚假场景交互类参数信息计算当前仿真时戳下雷达波束照射范围,并根据配置的SAR场景基准图,三维数字高程模型(DEM)以及添加的仿真目标(点目标、点阵目标、人造目标、SAR场景),生成当前仿真时戳下的三维坐标数据和电磁散射数据,并将数据发送给订购方。
1.2.4回波生成联邦成员
在主控联邦成员创建联邦执行后,回波联邦成员加入联邦执行,订购航迹与姿态对象类和交互类、目标与场景对象类和交互类、回波交互类,公布回波对象类,注册对象类实例,设置时间管理策略为受限且控制。
如图4a) SAR回波仿真主流程,在HLA仿真过程中,回波联邦成员在HOST端获取订阅的SAR系统参数、航迹与姿态数据、目标与场景数据,在当前仿真时戳下将SAR航迹与姿态参数、回波参数拷贝到DEVICE端;然后,根据分配的线程块调用核函数,执行完核函数后将生成的回波数据拷贝回HOST端。根据SAR回波仿真中方位向采样点数和仿真场景点数的实际物理意义,我们采用如下并行计算模式:
1) 每个方位向采样点(对应HLA一个仿真时戳)下调用一次核函数。
2) 执行核函数时,总的线程数目应该小于等于场景中点目标的个数,一般设置每个线程块包含的线程数目为512,每个线程格包含线程块数目为:(场景点目标个数+线程块中线程数目-1)/线程块中线程数目。
3) 每个线程计算一个或多个点目标的回波信号。
图4b) 对应图4a)中GPU并行计算流程图,在设备端执行代码(核函数)中,分别在距离向各采样点处将每个线程块所计算的点目标回波数据进行叠加,为避免线程间竞争,需采用原子操作实现多线程间对回波数据上各个距离向采样点的叠加。将GPU计算得到的回波数据拷贝到CPU中,同步各联邦成员进入下一个仿真时戳(方位向时刻)计算相应的回波数据,直到全部回波数据仿真完成后发送给订购方。
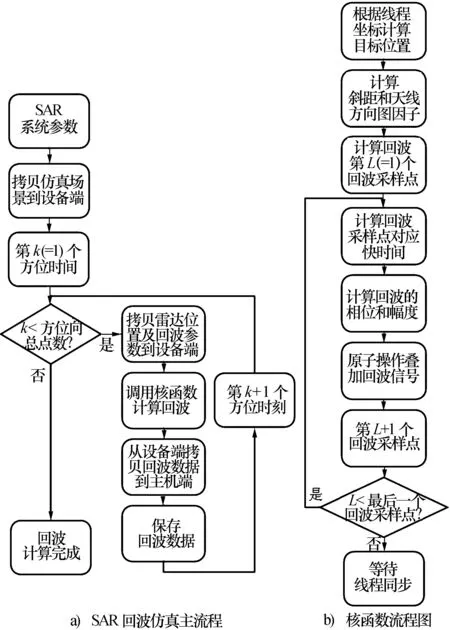
图4 并行回波仿真流程
1.2.5干扰联邦成员
在主控联邦成员创建联邦执行后,干扰联邦成员加入联邦执行,订购航迹与姿态对象类和交互类、虚假目标与虚假场景对象类和交互类、干扰回波交互类,公布干扰回波对象类,注册对象类实例,设置时间管理策略为受限且控制。
类似回波生成联邦成员,利用GPU计算干扰(噪声、欺骗、相干干扰)回波,待计算完毕后,干扰联邦成员将生成的干扰回波数据发送给订购方。
1.2.6SAR成像联邦成员
在主控联邦成员成功创建联邦执行后,SAR成像处理联邦成员加入,订购回波、干扰回波交互类,设置时间管理策略为受限。
待回波、干扰回波计算完毕后,SAR成像联邦成员接收回波、干扰联邦成员发送的回波、干扰回波数据,利用Chirp Scaling[6-7]成像算法进行成像验证。
1.2.7仿真评估联邦成员
在主控联邦成员成功创建联邦执行后,仿真评估联邦成员加入,订购SAR成像交互类,设置时间管理策略为受限。
待SAR成像完毕后,仿真评估联邦成员接收SAR成像处理联邦成员发送的成像结果,对成像结果进行分析与评估(主瓣宽度、峰值旁瓣比、积分旁瓣比)。
2 仿真系统的实现
2.1硬件系统的实现
硬件系统由千兆以太网络连接的DELL T7600、Supermicro K20c服务器(包含两块Tesla架构K20c GPU)、DELL T7600和DELL XPS8500等仿真机组成的局域网构成,这些仿真机分别对应图2中的主控仿真机、高性能GPU仿真机、数据库仿真机和应用终端仿真机,仿真机之间采用TCP/IP协议通信。硬件系统整体带宽在百兆左右,延时在微秒级别。
2.2软件系统的实现
软件系统是使用Microsoft Visual Studio 2010开发环境,基于.Net Framework 4开发,软件的安装运行平台是Windows XP/Windows 7系统。在开发过程中,考虑界面设计的便捷性以及控件的多样性,我们选择了C#作为开发语言,采用MVC框架来实现整个系统。图5所展示的软件界面依次为航迹与姿态仿真界面、目标与场景建模仿真界面、回波仿真界面和航迹与姿态展示界面。
整个软件系统分为七个模块,在HLA仿真过程中对应七个联邦成员。这七个模块采用模块化的设计思想进行开发,应用C++和CUDA C单独开发与测试,待测试通过后,以动态链接库(.dll)的形式集成到整个软件系统中,这样便于软件后期的维护与升级。

图5 仿真系统界面展示
3 结果分析与验证
3.1仿真参数
参照表3和表4的仿真参数,仿真生成的“航迹与姿态”“目标与场景”结果展示,如图6所示,其中,图6a)“航迹与姿态”为弹载SAR平飞轨迹,图6b)“目标与场景”为包括桥梁、河流等地物信息的电磁散射系数灰度图。

表3 弹载SAR仿真参数
表4目标与场景参数m
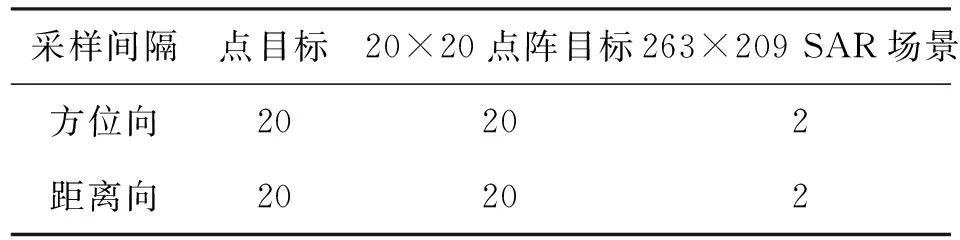
采样间隔点目标20×20点阵目标263×209SAR场景方位向20202距离向20202

图6 航迹与场景仿真数据
3.2结果分析
采用GPU并行计算回波仿真时往往可以优化,常见方法为:明确任务的串行和并行部分,按照算法确定数据和任务的划分方式,将每个需要并行实现的步骤映射为一个满足CUDA并行执行的内核函数,并合理的分配Grid和Block的大小,最大化GPU利用率[4]。本仿真系统主要采取以下三种优化方式:
1) 缓存配置
在L1高速缓存和共享内存共享同一块内存区域的GPU设备中,可根据共享内存和高速缓存在内核函数中预估使用情况调用函数cudaFuncSetCacheConfig( const void* func, cudaFuncCache cacheConfig )设置两者大小,如果使用到了共享内存,可设置cacheConfig= cudaFuncCachePreferShared使共享内存稍大,反之设置cacheConfig= cudaFuncCachePreferL1使L1高速缓存大;根据实际情况配置缓存后能优化资源利用率。
2) 使用异步执行和流(Stream)
CUDA流表示一个GPU操作队列,该队列中的操作将按指定的顺序执行。通过使用多个流,能在GPU执行核函数的同时,还能在主机端和设备端通过cudaMemcpyAsync()函数异步复制数据,最后需要使用cudaStreamSynchronize()同步多个流,通过异步执行和流的使用,可进一步提升程序的并行性。
3) 多GPU
在多个GPU的计算机上,还可以通过将数据分配到多个GPU上并行计算,并利用GPU之间的P2P零拷贝技术,较之前能进一步提升并行性和计算带宽。
针对三组不同的仿真目标,按照图4回波生成流程,分别测试CPU和GPU的回波生成时间,记录如表5所示。GPU计算主要优化手段如1)~3),是在每次方位向时刻下,将场景中的点目标按一定比例划分到三个流和两块GPU(K20c)来增加并行性和提升效率。

表5 回波生成时间2)
注: 2)tCPU为回波生成时间,tGPU为回波生成时间,tGPU_Opt为优化后GPU回波生成时间
在表5中,(tCPU-tGPU)/tCPU表示加速比,对于点目标,该值为负,说明GPU回波效率差于CPU,而当仿真目标有效点目标个数增大时(对于点阵和场景),GPU的并行计算优势才比较明显的体现出来。根据表5,将回波生成时间和回波生成加速比以曲线形式表现如图7所示,其中图7a)经过优化后的GPU回波生成时间有较大改善,图7b)的SAR回波生成加速比可进一步佐证。

图7 CPU/GPU回波生成时间对比
3.3成像验证
对于3.1节中仿真生成的SAR回波,采用CS成像算法验证,成像结果如图8所示。

图8 成像结果
4 结束语
通过本文的论述可知,弹载SAR快速数字仿真与评估系统采用HLA和GPU相关技术,快速仿真典型大场景地形和目标的弹载SAR回波数据、干扰数据和成像的全过程,并对其进行分析与评估,证实了该系统的高效性。该系统还可以通过灵活的添加联邦成员来扩展软件的功能,具有较强的可操作性和可重用性。这对于设计弹载SAR系统,研究与分析弹载SAR信号处理算法具有非常重要的应用价值。
[1]0-7381-2619-5. IEEE standard for modeling and simulation (M&S) high level architecture (HLA): framework and rules[S].
[2]0-7381-2621-7. IEEE standard for modeling and simulation (M&S) high level architecture (HLA): federate interface specification[S].
[3]0-7381-2623-3. IEEE standard for modeling and simulation (M&S) high level architecture (HLA): object model template (OMT) specification[S].
[4]SANDERS J,KANDROT E. PU高性能编程CUDA实战[M]. 聂雪军,译. 北京:机械工业出版社,2011.
SANDERS J, KANDROT E. CUDA by example: an introduction to general-purpose GPU programming[M]. NIE Xuejun, translated. Beijing: China Machine Press, 2011.
[5]李昱,王荫槐,梁红. 基于HLA的机载雷达模拟器[J]. 现代雷达,2007,29(5): 97-100.
LI Yu, WANG Yinhuai, LIANG Hong. Simulator of airborne radar based on HLA[J]. Modern Radar, 2007, 29(5): 97-100.
[6]保铮,邢孟道,王彤. 雷达成像技术[M].北京:电子工业出版社,2005.
BAO Zheng, XING Mengdao, WANG Tong. Radar imaging technology[M]. Beijing: Publishing House of Electronics Industry, 2005.
[7]GUMMING L G,WONG F H. 合成孔径雷达——算法与实现[M]. 洪文, 胡东辉, 译. 北京:电子工业出版社,2012.
GUMMING L G, WONG F H. Digital processing of synthetic aperture radar data: algorithms and implementation[M]. HONG Wen, HU Donghui, translated. Beijing: Publishing House of Electronics Industry, 2012.
陈阳春男,1989年生,硕士研究生。研究方向为雷达与电子战系统仿真。
孙清洋男,1990年生,博士研究生。研究方向为雷达与电子战系统仿真。
舒汀男,1981年生,博士,讲师。研究方向为雷达与电子战系统仿真,实时信号处理系统开发等。
唐斌男,1968年生,博士,副研究员。研究方向为雷达与电子战系统仿真、宽带电子战系统研制。
郁文贤男,1964年生,博士,教授。研究方向为雷达目标识别技术、多维信号处理技术等。
Fast Digital Simulation and Evaluation System Based on HLA for Misslie-borne SAR
CHEN Yangchun,SUN Qingyang,SHU Ting,TANG Bin,YU Wenxian
(Shanghai Key Laboratory of Intelligent Sensing and Recognition,Shanghai Jiaotong University, Shanghai 200240, China)
In order to overcome the time-consuming and cumbersome shortcomings of missile-borne SAR system simulation, based on the unique feature of HLA and using GPU as processor, this paper sets up a fast digital simulation and evaluation system for missile-borne SAR. The system includes federate members as main control, trajectory, target and scene, echo, jamming, imaging, and simulation evaluation. In addition, multiple sets test and verification results are figured out in order to ensure the correctness and effectiveness of the system, consequently the performance has been improved to several orders of magnitude compared to traditional method.
SAR; digital simulation; HLA; federation; RTI; GPU
陈阳春Email:chenyangchun@sjtu.edu.cn
2016-03-08
2016-05-16
TN911.7
A
1004-7859(2016)07-0001-06
DOI:10.16592/ j.cnki.1004-7859.2016.07.001
