液压马达式汽车主动稳定杆系统建模与控制
2016-08-09赵福民
赵 韩 赵福民 黄 康 邵 可 孙 浩
合肥工业大学,合肥,230009
液压马达式汽车主动稳定杆系统建模与控制
赵韩赵福民黄康邵可孙浩
合肥工业大学,合肥,230009
摘要:以液压马达式主动稳定杆系统为研究对象,推导得到了液压马达式主动稳定杆的非线性动力学模型。利用线性化反馈的滑模控制方法设计了其控制器,并利用Lyapunov理论对控制系统的稳定性进行了证明。通过CarSim和MATLAB/Simulink对主动稳定杆系统进行了联合仿真,得出安装液压马达式主动稳定杆系统的车辆在双移线工况下运行的响应曲线。为了验证设计的控制方法,进行了实车试验。结果表明,与被动稳定杆相比,主动稳定杆系统具有较好的抗侧倾特性以及乘坐舒适性。
关键词:主动稳定杆;非线性动力学;滑模控制;防侧倾
0引言
汽车转弯时,受到离心力的作用,车身在侧向加速下会发生侧倾,不但易造成翻车等事故,而且降低了车内人员的舒适性和汽车的操纵性,间接降低了安全系数[1]。为减小汽车转弯时的侧倾,乘用车一般都在车身或车架底部安装两端与悬架下摆臂或减振器立柱相连的被动式稳定杆。汽车发生侧倾时,扭转的稳定杆会给车身施加一个反侧倾力矩,从而减小侧倾翻车的可能。
被动式稳定杆虽在一定程度上减小了侧倾,但不能对反侧倾力矩进行主动调节,使侧倾角始终为零,因此不能完全消除侧倾。主动稳定杆系统(active stabilizer bar system,ASBS)按照激励器的类型可以分为液压马达式、液压缸式、电机式[2]。液压马达式汽车ASBS由主动稳定杆本体、液压系统和控制系统三部分组成,可根据传感器反馈或计算得到的侧向加速度、侧倾角、车速等信号数据,采用合适的控制方法调节激励器以输出相应大小的反侧倾力矩,具有良好的防侧倾效果,可提高车辆的安全性、操控性和车内人员乘坐的舒适性[3-5]。
近年来,国内外学者对ASBS的研究越来越多,文献[6]采用直流电机设计主动稳定杆,采用鲁棒控制方法提高电机旋转控制性能;文献[7]将电机式主动稳定杆安装在SUV样车上,给出了硬件的实现方法和约束条件,并进行了样车试验;文献[8]采用PID控制和前馈、反馈控制来研究主动稳定杆;文献[9]通过主动稳定杆对SUV进行主动侧倾控制,设计了基于模糊PID的主动侧倾控制器。
目前,基于液压马达的ASBS研究比较少,本文以液压马达式ASBS为研究对象,推导得到了液压马达式主动稳定杆的非线性动力学模型,利用线性化反馈的滑模控制方法设计了其控制器,保证了系统的鲁棒性,并利用Lyapunov理论对控制系统的稳定性进行了证明。结合试验车型的参数,在CarSim中搭建了汽车整车模型,并用CarSim和MATLAB/Simulink对设计的控制方法进行了联合仿真验证,得出装有液压马达式ASBS的车辆在双移线工况下的响应曲线。最后利用安装ASBS的实验车进行了实际转弯工况的试验。试验结果表明,与被动稳定杆相比,采用线性化反馈滑模控制的ASBS具有较好的抗侧倾特性以及乘坐舒适性。
1主动稳定杆动力学模型
如图1所示,为简化模型,通常在计算时不考虑车体侧倾中心的横向偏移,将水平停放时前后侧倾中心的连线OfOr作为侧倾轴。车身质心ms与侧倾轴的竖向距离为hs,前后侧倾中心离地高分别为hf、hr,前后非簧载质量的质心分别为mφf、mφr,与侧倾轴的距离分别为hφf、hφr。前后轮距分别为df、dr,车身质心与前后轴的水平距离分别为lf、lr,显然轴距l=hf+hr。
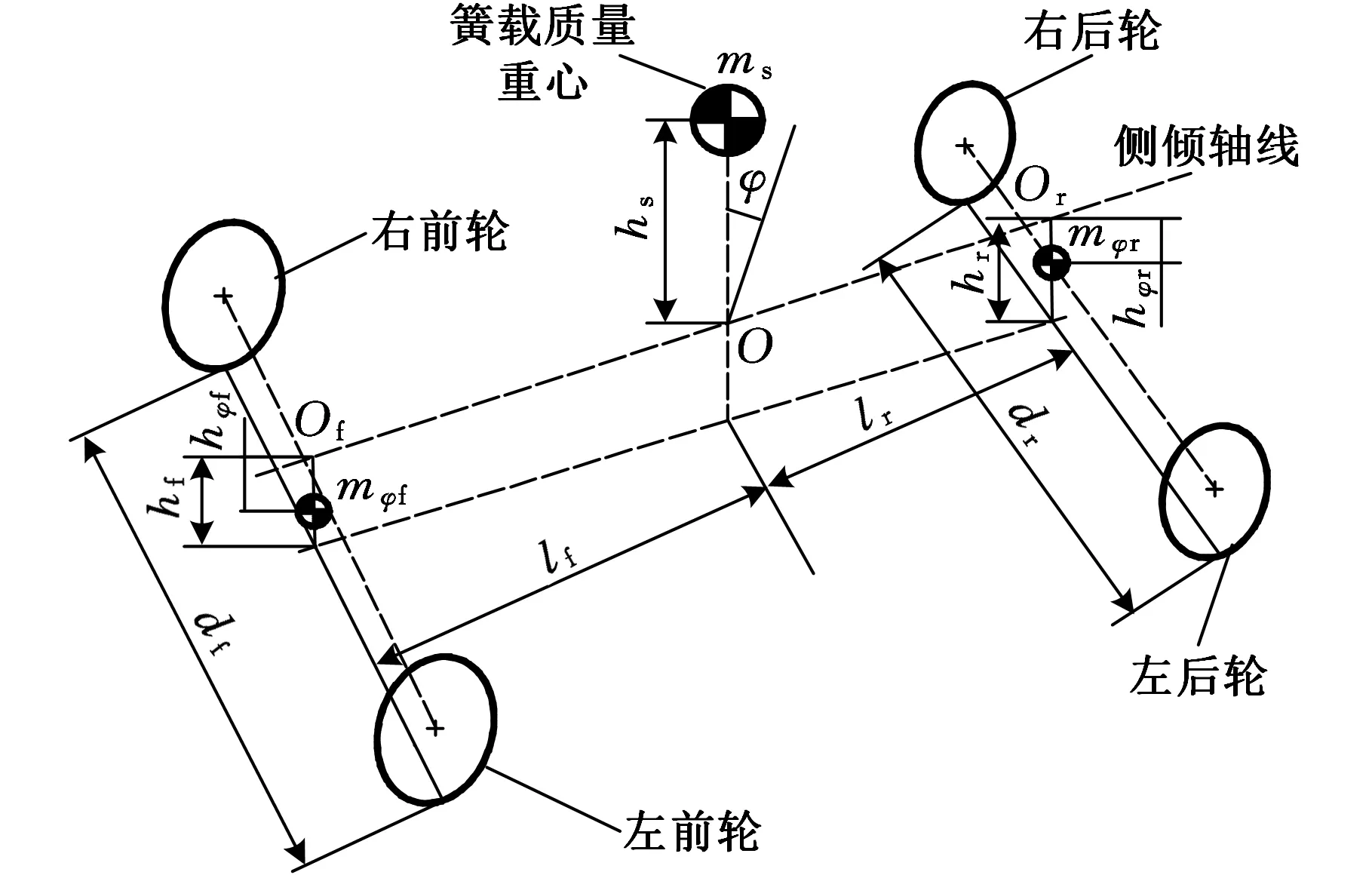
图1 汽车结构尺寸
假设汽车垂直于纸面向外行驶并向右侧转弯,如图2所示,忽略轮胎的刚性和阻尼特性,车身质心ms在侧向加速度μ的作用下沿着侧倾轴发生侧倾,侧倾角为φ。
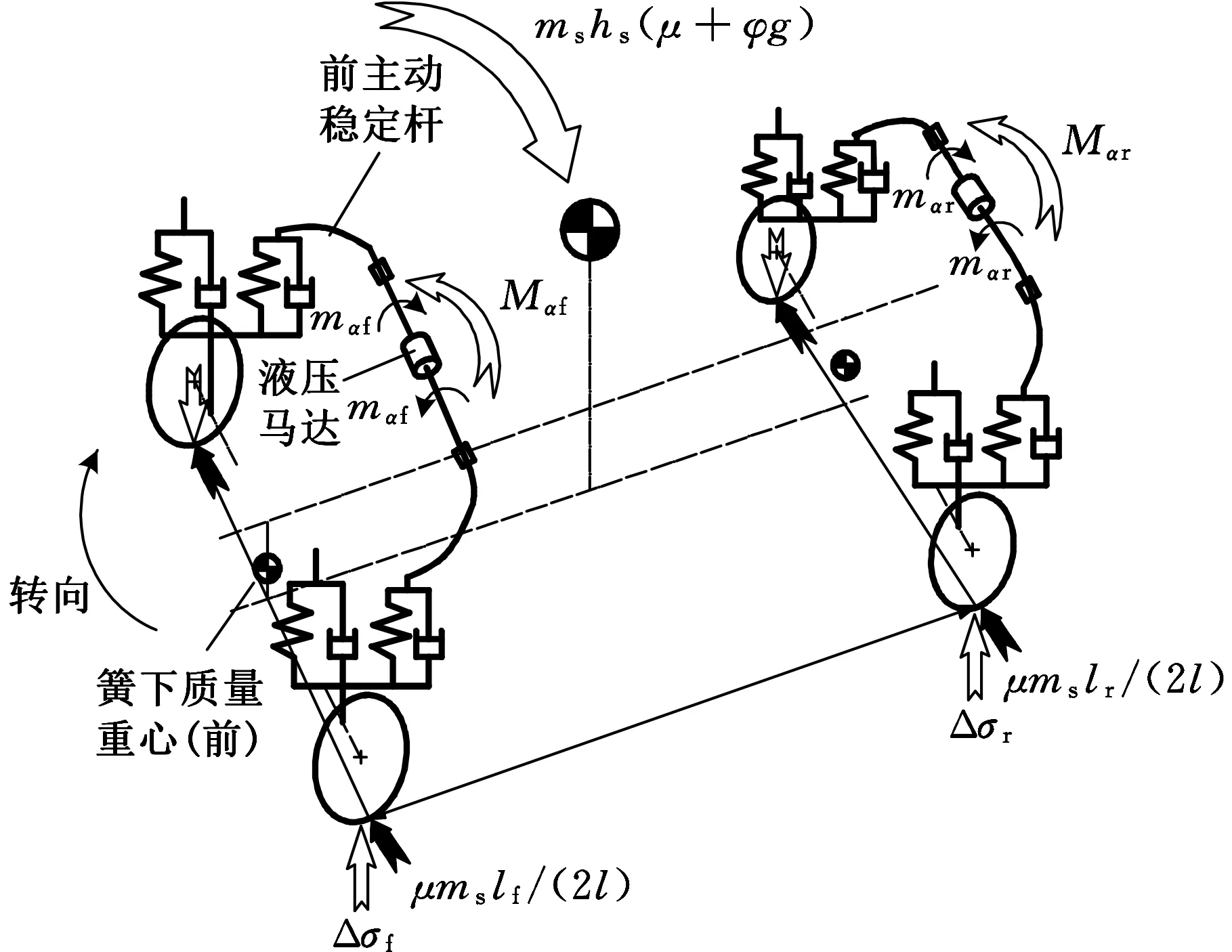
(a)车辆模型
(b)车轮模型图2 主动稳定杆的受力模型
根据受力模型,考虑簧载质量(车身质量),在侧倾角φ下,侧倾力矩M由侧向加速度μ造成的侧倾力矩和由重力加速度g造成的侧向力矩组成,反侧倾力矩由悬架刚度Kcφ、稳定杆刚度Ktφ在φ下产生的力矩及液压马达产生的反侧倾力矩Mα组成,整车的动力学模型为
(1)
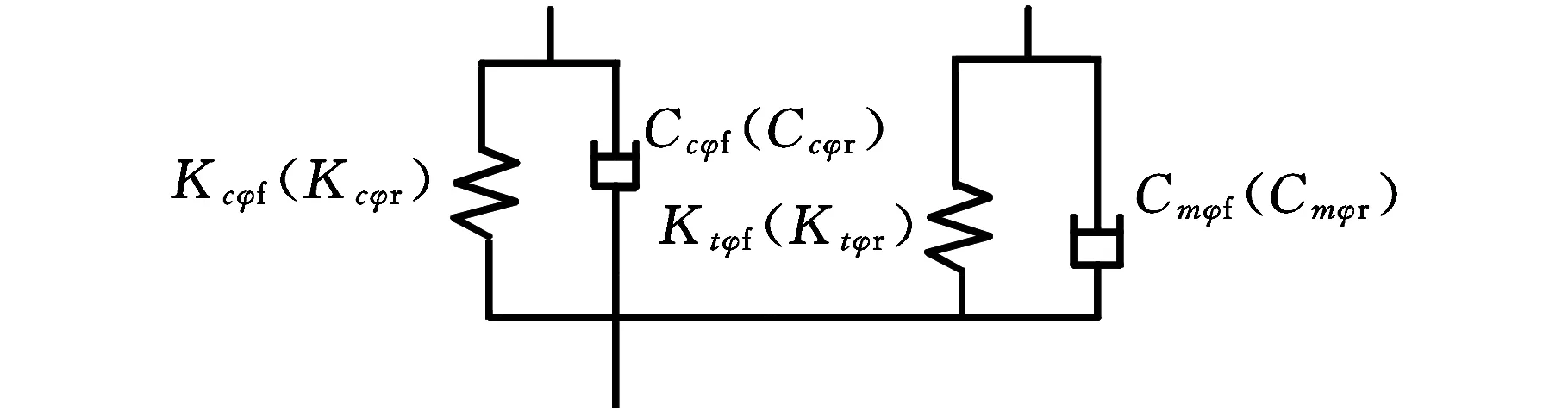
Cφ=Cφf+Cφr=2Ccφf+2Cmφf+2Ccφr+2Cmφr
Kφ=Kφf+Kφr=2Kcφf+2Ktφf+2Kcφr+2Ktφr
式中,Imsφ为簧载质量绕侧倾轴的转动惯量;Ccφf为前悬架阻尼系数Cmφr;Cmφf为前液压马达等效在稳定杆两端的阻尼系数;Ccφr为后悬架阻尼系数;Cmφr为后液压马达等效在稳定杆两端的阻尼系数;Kφf为前轮的侧倾刚度;Kφr为后轮的侧倾刚度;Kcφf、Kcφr分别为前后悬架的刚度;Ktφf、Ktφr分别为前后稳定杆的刚度。
考虑前后主动稳定杆液压马达产生的反侧倾力矩分配系数α,即
Mar=(1-α)Maf/α
(2)
将式(2)代入式(1),得前主动稳定杆激励器产生的反侧倾力矩:
Maf=α(μmshs+mshsφg-Tms)
(3)
同理可得后主动稳定杆激励器产生的反侧倾力矩:
Mar=(1-α)(μmshs+mshsφg-Tms)
(4)
考虑非簧载质量,垂向载荷会在左右轮发生转移(设转移量为Δσ),有
(5)
Kφf=2Kcφf+2Ktφf
式中,Iφf为前悬架转动惯量。
因此,前后车轮的垂向载荷转移量为
Δσf=(Tφf+Mαf+μmslrhf/l)df
(6)
同理可得后车轮的垂向载荷转移量:
Δσr=(Tφr+Mαr+μmslfhr/l)dr
(7)
若前后轮垂向载荷转移量分配系数为β,则希望的轮胎垂向载荷变化量为
(8)
(9)
结合式(3)~式(9),考虑前后轮垂向载荷转移量的分配,所需要的激励器产生的反侧倾力矩为
(10)
(11)
则液压马达需要输出的扭矩为
(12)
(13)
γf=Rαf/lαf
(14)
γr=Rαr/lαr
(15)
式中,γf、γr为与稳定杆几何尺寸有关的常量;Rαf、Rαr分别为前后稳定杆两端连接孔到稳定杆本体轴线的距离;lαf、lαr分别为前后稳定杆两端连接孔的距离。
结合式(3)~式(13),可以得到前稳定杆液压马达输出扭矩:
(16)
Ieqf=γf{(1-β)Iφf-βdfIφr/dr+
Imsφ[αβ+(1-α)βdf/dr]}
Ceqf=γf{(1-β)Cφf-βdfCφr/dr+
Cmsφ[αβ+(1-α)βdf/dr]}
Keqf=γf{(1-β)Kφf-βdfKφr/dr+
(Kmsφ-mshsg)[αβ+(1-α)βdf/dr]}
Geqf=γfμms{[(β-1)lrhf+βdflfhr/dr]/l+
[αβ+(1-α)βdf/dr]hs}
所以前主动稳定杆的动力学模型为
(17)
同理可得后稳定杆液压马达输出扭矩:
(18)
Ieqr=γr[βIφr-(1-β)drIφf/df+
Imsφ(1-β)(1-α+αdr/df)]
Ceqr=γr[βCφr-(1-β)drCφf/df+
Cmsφ(1-β)(1-α+αdr/df)]
Keqr=γr[βKφr-(1-β)drKφf/df+
(1-β)(1-α+αdr/df)(Kmsφ-mshsg)]
Geqr=γrμms[(1-β)(1-α+αdr/df)hs-
βlfhr/l+(1-β)drlrhf/(dfl)]
所以后主动稳定杆的动力学模型为
(19)
由表1中的试验车型参数,可以计算出Ieqf=35.02kg·m2,Ceqf=246.38N·m·s/rad,Keqf=7124.88N·m/rad,Geqf=79.5μN·m,Ieqr=23.63kg·m2,Ceqr=246.38N·m·s/rad,Keqr=6715.11N·m/rad,Geqr=50.25μN·m。
有报道表明,2型糖尿病合并冠心病患者体内sdLDL的水平较健康对照人群明显升高,而LDL-C的水平却并无明显差异。SdLDL形成的途径主要为[11]:VLDL转运的TG在CETP的作用下转化成HDL-C,使富含胆固醇的VLDL残粒、富含TG的HDL颗粒增多。富含TG的HDL颗粒被肝脂肪酶或脂蛋白脂酶水解,使ApoA-I从HDL解离,在肾小球过滤,肾小管细胞降解[7]。小密度LDL-C颗粒浓度增加也通过相同的方式转化,VLDL转运的TG水平增加,CETP促使TG转化成胆固醇酯,LDL转化成LDL胆固醇。富含TG的LDL被肝脂肪酶或脂蛋白脂酶水解,形成小密度LDL颗粒。
2控制器的设计及稳定性分析
ASBS是一个非线性系统,控制比较复杂。在ASBS控制器设计中,传统的线性系统控制方法具有很大的局限性,达不到理想的控制效果。

表1 试验车参数
以微分几何为基础的非线性控制理论在近几年得到迅速发展,其中,线性化反馈法作为一种相对有效的非线性系统控制方法,近年来引起了学者的广泛关注。该方法的核心思想是将复杂的非线性问题转化为线性问题进行分析[10],但线性化反馈非线性控制方法未考虑实际系统的不确定性,因此对参数的变化及扰动非常灵敏,鲁棒性不强,在实际系统应用中有很大的局限性。滑模控制方法适用于非线性系统的控制,控制算法相对简单,具有较强的鲁棒性,控制稳定,且容易实现,在各行业中有广泛应用[11-12],但现有的滑模控制方法大多将控制变量与参考量的误差作为切换函数,无法对滑动模态的动态品质进行优化控制,而且系统会因来回穿越滑模面而产生抖振。
基于以上原因,本文以ASBS为研究对象,将线性化反馈控制与滑模控制相结合,提出了ASBS线性化反馈的滑模控制策略。该方法结合了线性化反馈非线性控制与滑模控制的优点,提高了整个控制系统的鲁棒性,可以有效抑制滑模控制方法产生的抖振。
前后ASBS控制器设计方法相同,因此以前ASBS的控制器设计为例,由式(16)可知:
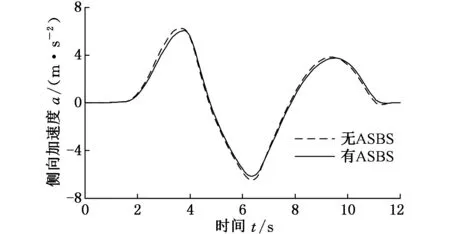
其中, mαf为系统控制输入,令dt=Geqf/Ieqf为系统外加干扰。当干扰dt较大时,为保证控制系统的鲁棒性,必须设定干扰上界D,则dt 设理想的侧倾角信号为φd,则侧倾角的误差信号ε=φ-φd。取滑模函数: 其中,λf>0,满足Hurwitz条件。 ρf>0 -ρf|sf|+sfGeqf/Ieqf 3主动稳定杆系统的仿真 本次仿真采用软件CarSim和Simulink对ASBS进行联合仿真。图3所示为ASBS的仿真环境。首先采用CarSim建立精确的车辆模型,在MATLAB/Simulink中建立车辆的ASBS模型以及线性化反馈的滑模控制器模型,然后将车辆模型通过S-fuction链接到Simulink的仿真环境中。Simulink的输入接口参数为车轮轴受到的弹簧力,CarSim的输出接口参数为车辆侧倾角以及车辆侧倾加速度,通过标准化接口实现不同仿真系统之间的连接,完成联合仿真任务。 图3 联合仿真环境 为验证汽车ASBS的防侧倾性能,CarSim的仿真工况设为双移线工况,行驶速度均控制为60km/h,分别对装有ASBS和普通被动稳定杆(无ASBS)的车辆进行仿真,并将两者的特性响应曲线进行了对比。 通过CarSim/Simulink联合仿真得到相关数据并绘出图形。从图4~图6所示的仿真结果可以看出,采用ASBS的车辆模型的防侧倾性能和汽车操纵稳定性良好。 图4 侧向加速度变化曲线 图5 侧向加速度与车身侧倾角关系曲线 图6 车身侧倾角变化曲线 如图4所示,在相同时刻,有ASBS的汽车侧向加速度相对于无ASBS的汽车要小一些,但两者相差非常小,说明汽车在相同工况下以相同速度行驶时,其侧向加速度变化不大。 如图5所示,汽车的侧向加速度较小(小于1m/s2) 时,有ASBS的汽车车身侧倾角与无ASBS的汽车相差不大;侧向加速度较大时,有ASBS的汽车车身侧倾角较无ASBS的汽车车身侧倾角小很多,有效减小了侧倾角,汽车在一定的侧向加速度时具有很小的侧倾角,体现了ASBS抑制车身侧倾的有效性。 图6所示为有ASBS和安装被动稳定杆(无ASBS)汽车的侧倾角-时间历程曲线,可以看出,有ASBS的汽车车身侧倾相比于无ASBS的汽车得到了较大幅度的抑制,并且曲线更加光滑平顺,这有利于提高汽车的操纵稳定性和乘坐的舒适性。 综上,在相同工况以及相同速度下,对装有ASBS和装有普通被动稳定杆(无ASBS)的汽车进行汽车车身侧向动力学性能仿真分析,由CarSim/Simulink联合仿真的结果可以看出,采用线性化反馈滑模控制的ASBS在汽车产生侧倾趋势时给车辆快速施加反侧倾力矩,提高了汽车的抗侧倾能力,车身侧倾角大大减小,提高了车辆的操纵稳定性和乘坐舒适性,提升了汽车的弯道行驶性能。 4实车试验 为了验证主动稳定杆系统的防侧倾性能以及仿真结果的正确性,进行了实车试验测试。实车为东风风神S30,如图7所示,将主动稳定杆安装在原被动稳定杆位置,液压马达通过液压管路与液压系统相连,保证液压马达正常工作。 图7 主动稳定杆的的安装图 实车试验中,使汽车在与双移线工况相似的蛇形工况和转弯工况下以60km/h左右的速度行驶,对比装有主动稳定杆系统的汽车和装有普通被动稳定杆的汽车的行驶状况,并利用安装在车身上的角度传感器采集汽车的侧倾角信号。图8所示为汽车在蛇形工况下的运行状况,图9所示为汽车在转弯工况下的运行状况。 (a)无ASBS (b)有ASBS图8 蛇形工况下的测试 (a)无ASBS (b)有ASBS图9 转弯工况下的测试 表2所示为有ASBS和装有被动稳定杆(无ASBS)的汽车以60km/h的速度在蛇形工况和转弯工况下行驶时,角度传感器在汽车行驶处的同一位置所采集到的车身侧倾角数据。 表2 试验车的侧倾角 (°) 由图8、图9以及表2中汽车侧倾角数据可以看出,在蛇形工况和转弯工况下行驶,相比于有ASBS的汽车,装有普通被动稳定杆(无ASBS)的汽车在转向时产生了较大的侧倾角,并伴有明显的转向不足。有ASBS的汽车会较大程度地改善上述状况,车身侧倾角明显减小,转向不足有较大改善,说明其抗侧倾性能以及转向操控性明显优于装有普通被动稳定杆的汽车,并且提高了行驶的安全性,验证了线性化反馈的滑模控制器的有效性和仿真模型的正确性。 5结论 (1)建立了一种液压马达式汽车主动稳定杆的非线性动力学模型,设计了线性化反馈的滑模控制器,并利用Lyapunov理论证明了控制器的鲁棒稳定性。 (2)参照试验车型的参数,利用软件CarSim和MATLAB/Simulink进行了联合仿真,得出了装有主动稳定杆系统的汽车和装有普通被动稳定杆的汽车的车身侧倾角、侧向加速度的响应曲线,并进行了对比。 (3)在蛇形工况和转弯工况下进行了实车试验,试验结果表明,与被动稳定杆相比,采用线性化反馈的滑模控制的主动稳定杆系统具有较好的抗侧倾特性以及操纵稳定性。 参考文献: [1]Cimba D, Wagner J, Baviskar A. Investigation of Active Torsion Bar Actuator Configurations to Reduce Vehicle Body Roll[J]. Vehicle Syst. Dyn., 2006, 44(9): 719-736. [2]Uys P E, Els P S, Thoresson M J, et al. Experimental Determination of Moments of Inertia for an Off-road Vehicle in a Regular Engineering Laboratory[J]. Int. J. Mech. Eng. Educ., 2006, 34(4): 291-314. [3]Buma S, Ookuma Y, Taneda A, et a1. Synthesis and Development of Electric Active Stabilizer Suspension System[J]. Proceeding of the Japan Society of Mechanical Engineers, 2008, 74(748): 2827-2836. [4]夏如艇,武马修一. 采用电机作动器的主动悬架系统的仿真[J]. 汽车工程, 2013, 35(5): 445-450. Xia Ruting, Buma Shunichi. A Simulation of Active Suspension System with Motor Actuator[J]. Automotive Engineering, 2013, 35(5): 445-450. [5]邓兆祥,来飞.车辆主动悬架用电磁直线作动器的研究[J].机械工程学报, 2011, 47(14): 121-128. Deng Zhaoxiang, Lai Fei. Electromagnetic Linear Actuator for Vehicle Active Suspension[J]. Journal of Mechanical Engineering, 2011, 47(14): 121-128. [6]Shuuichi Buma, Yasuhiro Okuma, Akiya Taneda, et al. Design and Development of Electric Active Stabilizer Suspension System[J]. Journal of System Design and Dynamics, 2010, 4(1): 61-76. [7]Jeon K, Hwang H, Choi S, et al. Development of an Electric Active Rollcontrol(ARC) Alogrithm for a SUV[J]. International Journal of Automotive Technology, 2012, 13(2): 247-253. [8]Darling J, Hickson L R. An Experimental Study of a Prototype Active Anti-roll Suspension System[J]. Vehicle Syst. Dyn., 1998, 29(5): 309-329. [9]周兵,吕绪宁,范璐,等. 主动悬架与主动横向稳定杆的集成控制[J]. 中国机械工程, 2014, 25(14): 1978-1983. Zhou Bing, Lü Xuning, Fan Lu, et al. Integrated Control of Active Suspension System and Active Roll Stabilize[J]. China Mechanical Engineering, 2014, 25(14): 1978-1983. [10]李大东,孙秀霞,董文瀚,等.基于线性化反馈的滑模变结构重装空投纵向控制律设计[J].控制理论与应用, 2013, 30(1): 54-60. Li Dadong, Sun Xiuxia, Dong Wenhan, et al. Pitch Control for Flight in Heavy-weight Airdrop Based on Feedback Linearization Theory and Variable-structure Control[J]. Control Theory & Applications, 2013, 30(1): 54-60. [11]高远,范健文,谭光兴,等.汽车悬架系统混沌运动的自适应反演滑模控制[J].中国机械工程, 2013, 24(11):1531-1536. Gao Yuan, Fan Jianwen, Tan Guangxing,et al. Control for Chaos in Automobile Suspension System Based on Back-stepping Design Adaptive Sliding Mode Controller[J].China Mechanical Engineering, 2013, 24(11):1531-1536. [12]Bartolini G, Pisano A, Punta E, et al. A Survey of Applications of Second-order Sliding Mode Control to Mechanical Systems[J]. Int. J. Control, 2003, 76(9): 875-892. (编辑张洋) 收稿日期:2015-09-29 基金项目:国家国际合作项目(2014DFA80440) 中图分类号:U461 DOI:10.3969/j.issn.1004-132X.2016.14.023 作者简介:赵韩,男,1957年生。合肥工业大学机械与汽车工程学院教授、博士研究生导师。主要研究方向为机械传动、磁力机械、数字化设计与制造、动力学建模与控制。出版专著3本,发表论文50余篇。赵福民,男,1991年生。合肥工业大学机械与汽车工程学院硕士研究生。黄康,男,1968年生,合肥工业大学机械与汽车工程学院教授、博士研究生导师。邵可,男,1990年生,合肥工业大学机械与汽车工程学院博士研究生。孙浩,男,1989年生,合肥工业大学机械与汽车工程学院博士研究生。 Modeling and Control of Vehicle Active Stabilizer Bar System with Hydraulic Motor Zhao HanZhao FuminHuang KangShao KeSun Hao Hefei University of Technology,Hefei,230009 Abstract:Taking active stabilizer bar system with hydraulic motor as the object, a nonlinear dynamics model of active stabilizer bar system with hydraulic motor was established. The controller was designed with the control method for the feedback linearization sliding mode. And the stability of the control system was analyzed by Lyapunov stability theory. On the basis of the CarSim-MATLAB/Simulink co-simulation of the active stabilizer bar system, the response curves on the double-lane-change conditions were achieved. A real vehicle test was also worked out for the verification of the desired control method. The results show that the active stabilizer bar system has the preferable characteristics of anti-roll and ride comfort compared with the passive stabilizer bar. Key words:active stabilizer bar; nonlinear dynamics; sliding mode control; anti-roll