新型三自由度搬运机器人关键技术
2016-08-02谭玉良邰召勤王梦涛高鲁文张良安安徽工业大学机械工程学院安徽马鞍山4303安徽华创智能装备有限公司安徽马鞍山4303
谭玉良,邰召勤,王梦涛,高鲁文,余 亮,张良安(.安徽工业大学机械工程学院,安徽马鞍山4303;.安徽华创智能装备有限公司,安徽马鞍山4303)
新型三自由度搬运机器人关键技术
谭玉良1,邰召勤2,王梦涛1,高鲁文1,余亮1,张良安1
(1.安徽工业大学机械工程学院,安徽马鞍山243032;2.安徽华创智能装备有限公司,安徽马鞍山243032)
针对从事机床上下料等工作的SCARA机器人,其电机和减速装置靠近执行末端,造成占用空间大、能效低的问题,设计一种新型三自由度搬运机器人,该机器人将前两关节的驱动装置集中于基座。基于这种新型构型,采用D-H法建立该机器人运动学模型并进行运动学分析,采用修正梯形模式的速度、加速度和位移方程进行轨迹规划,利用SolidWorlks软件建立新型三自由度搬运机器人的三维结构模型。制作简化的机器人模型和机器人实体,分别进行点到点运动比较试验和机床上下料的搬运试验。结果表明:该三自由度搬运机器人的结构设计有效降低了末端质量,增大了操作空间;且满足搬运、分拣等功能要求。
搬运机器人;结构设计;运动学模型;轨迹规划
工业机器人是完成抓取、分拣、包装等重复性操作的自动化装备[1-2]。为了减轻人工劳动强度,提高工作效率,工业机器人被广泛应用于工厂自动化生产中[3-4]。现阶段,国内外对于搬运机器人的研究趋于成熟,如日本、欧美国家已将码垛[5]、五轴、六轴[6]等搬运机器人按照质量分成不同型号,上海沃迪公司设计的码垛机器人已成为世界行业领先者[7]。然而,对于广泛应用于机床上下料等搬运作业的SCARA机器人,由于其电机和减速机主要安装在本体的小臂上,使末端执行器部分过于臃肿,作业空间受到一定的限制,须采用昂贵的RV减速机及谐波减速机。为了克服上述不足,设计一种用于物料搬运的新型三自由度搬运机器人,以期扩大现有搬运机器人的使用范围、降低制造成本。
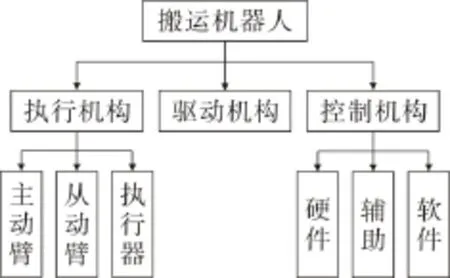
图1 搬运机器人系统组成Fig.1 System of transfer robot
1 机械结构设计
三自由度搬运机器人主要由执行机构(即机械部分)、驱动机构和控制机构三大部分组成[8],其系统组成如图1。其中执行结构一般包括主动臂、从动臂和末端执行器[9]。
搬运机器人常用的机械结构包括机械手式、龙门式、悬臂式和关节式等[10]。本文采用二自由度串联机械手结构,2个驱动装置驱动2个主动臂,实现平面内的运动;末端加1个竖直方向上的驱动,实现空间内三自由度的运动。
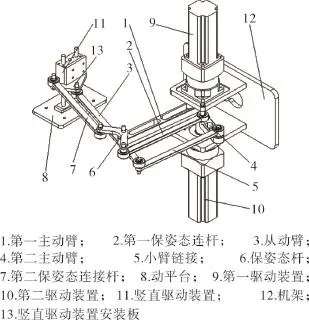
图2 新型三自由度搬运机器人三维模型Fig.2 Three-dimensional model of new 3-DOFT-robot
设计的新型三自由度机械人结构如图2。该机构基于含局部闭链式码垛机器人,去除底座和手座2个转动关节,将前两关节的驱动装置集中于基座,在末端执行部分添加1个竖直驱动装置,以降低末端质量。此结构属于串联机器人机构,2个主动支链和1个从动支链分离,从结构上可解决串联机构作业空间不足的问题。其机构包括机架、末端执行器、第一主动支链、第二主动支链、从动支链。第一主动支链、第二主动支链和从动支链均为平行四边形结构,共同保持动平台姿态的不变。第一主动支链由第一主动臂、第一保姿态连接杆、保姿态杆、机架组成;第二主动支链由第一主动臂、第二主动臂、从动臂、小臂连接杆组成;从动支链由竖直驱动装置安装板、从动臂、保姿态杆、第二保姿态连接杆组成。
该机器人采用平行四边形结构和串联支链结构限制平台的自由度。与SCARA机器人和五轴、六轴机器人相比,其结构简单、安装调试方便;另外解决了机械结构刚度不足问题,可选用普通的行星减速机替换RV减速机或谐波减速机,降低机构的制造成本。
2 关键技术分析
三自由度搬运机器人的关键技术包括运动学分析、轨迹规划、路径规划及控制系统设计等。
2.1运动学分析
运动学分析主要归为两类问题:运动学正解;运动学逆解。运动学正解依据关节变量和机器人杆件尺度参数,求解机器人末端执行器的位置和姿态;运动学逆解即在已知机器人的末端执行器的起点和终点条件下求解机器人各关节变量。考虑到第一主动臂与第一保姿态连接杆及第二主动臂与从动臂等长且平行,文中将设计的新型三自由度搬运机器人简化成3个二自由度4杆铰接机构,并基于D-H法建立该搬运机器人的运动学模型,如图3。文中仅对该搬运机器人进行运动学逆解分析。
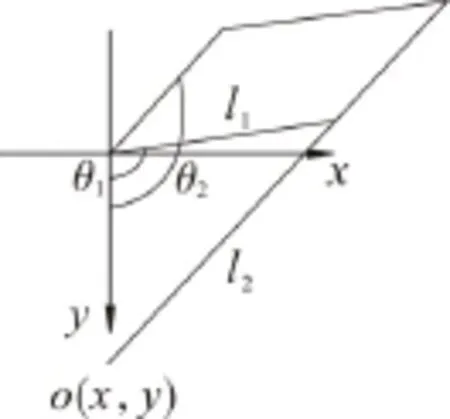
图3 搬运机器人运动学模型Fig.3 Kinematic model of T-robot
在已知动平台参考点o的位矢γ=(x,y)T的条件下,确定主动臂转角θi(i=1,2)。如图3所示,在固定坐标系o-xy下构造闭环方程,

式中l1,l2,μ1,μ2分别表示支连中主、从动臂杆长和单位矢量。 μ1=(cosθ1,sinθ1),μ2=(cosθ2,sinθ2)。对式(1)两端取模并开平方,得如下方程:

其中A,B,C,D为待定常数。根据式(2),可以解出

根据式(3)可确定单位矢量μ1,由(1)式可以得μ2。
2.2轨迹规划
常用轨迹规划有正弦模式、多项式模式和修正梯形模式。考虑到速度和加速度的跃度和跳度不能太大,本文选择修正梯形模式[11-13]。修正梯形模式加速度分段方程如式(4)。
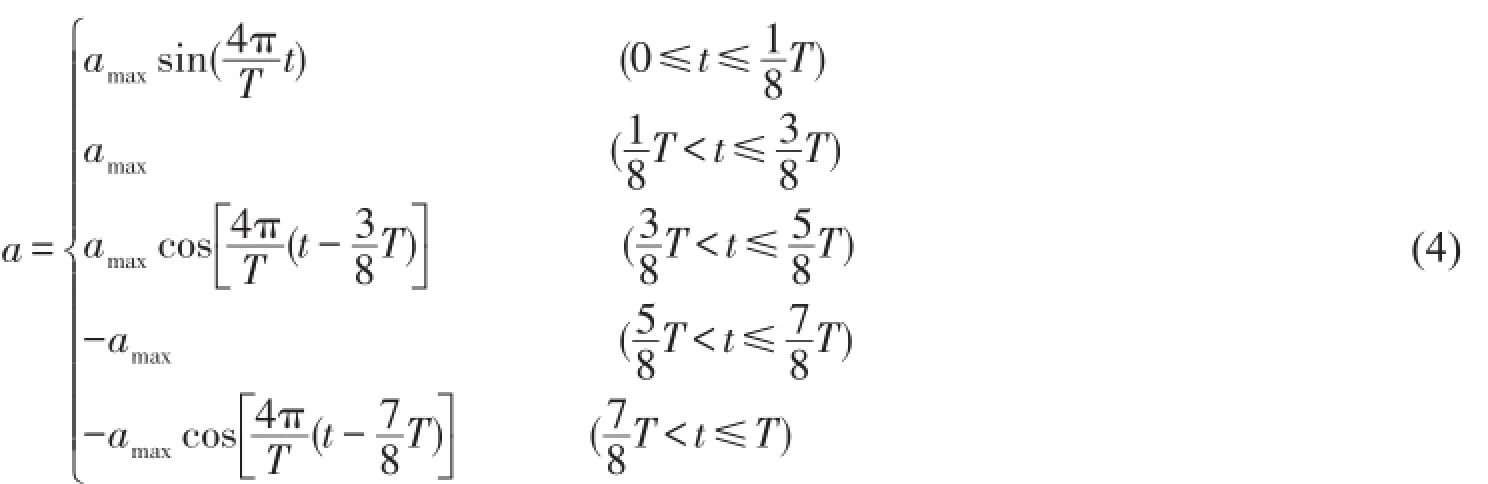
由式(4)得速度方程(5)。
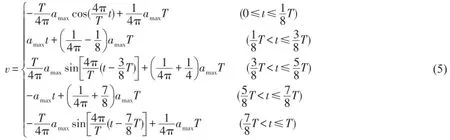
对式(5)两边积分,再根据边界条件t=0时,v=0,s=0,得位移方程(6)。
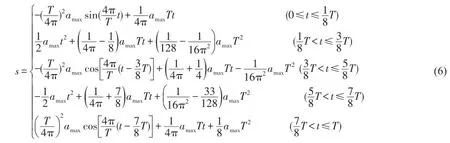
式中:a为瞬时加速度;amax为最大加速度;T为运动周期;v为瞬时速度;s为运动路程。
2.3路径规划
根据轨迹规划方程和搬运工件的外形尺寸建立搬运轨迹模型,模型以图片形式存于PC机。搬运机器人软件系统对图片进行离散、取点、分割等处理,将搬运过程离散成基本的轨迹段,如直线、斜线、圆弧等。然后对基本的轨迹段进行二次插补运算,得到脉冲运动指令。脉冲指令通过CAN总线传输至伺服电机,伺服电机动作完成搬运。改变工件的搬运轨迹可改变机器人运动路线。
2.4控制系统设计
机器人控制系统由硬件系统和软件系统两部分组成。以PC机+PCI运动控制卡+远程扩展模块构成开放式的下位机硬件控制系统[13-14],运动控制采用位置控制模式,由PC机和PCI-DMC-A01运动控制卡发出运动控制脉冲信号,通过ASD-DMC-RM32PT模块接至伺服电机驱动器,实现对各电机的运动控制。PCIDMC-A01型12轴运动控制轴卡运行于DMCNETTM网络(Delta Motion Control Network,一种基于CANopen的网络),通信频宽高达2.5 MB/s,最远通信距离30 m,1张卡可在1 ms内同步处理12轴伺服电机,另配ASD-DMC-RM32PT(I/O)模块以处理抱闸等数字量。
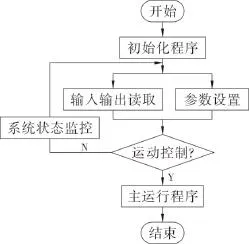
图4 软件控制系统总体结构Fig.4 General structure of software control system
采用Win7操作系统和可视化编程软件Labview完成上位机软件系统的开发,软件控制系统总体结构如图4。当程序开始时,系统在后台自动调用运动控制卡各模块函数,进行程序的初始化;待外部参数设置完成,系统读取输入输出信号,控制机器人的运动,完成抓放动作,并在运动过程中对运动状态进行实时监控。
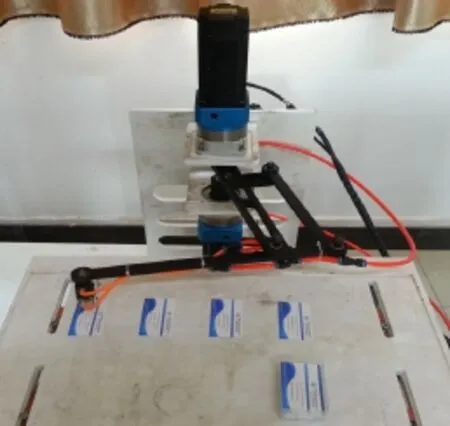
图5 新型三自由度搬运机器人试验模型Fig.5 Experimental model of new 3-DOFT-robot
3 试验分析
按照文中设计机器人的机械结构加工机器人试验模型。为节省成本,在保证末端执行器平动的条件下,去掉第一姿态杆和小臂连接杆,将试验模型进行简化,结果如图5。采用该搬运机器人模型与安徽华创智能装备公司生产的SCARA机器人进行点到点的运动比较试验。试验过程中将置于工作台上有序放置的名片抓取并放进固定的盒中,进行点到点的名片分拣装盒。规定每装入1张名片为1个节拍,以盒子中心位置进行定位,以放置点与中心的偏离为定位偏差,机器人装盒试验结果如表1。
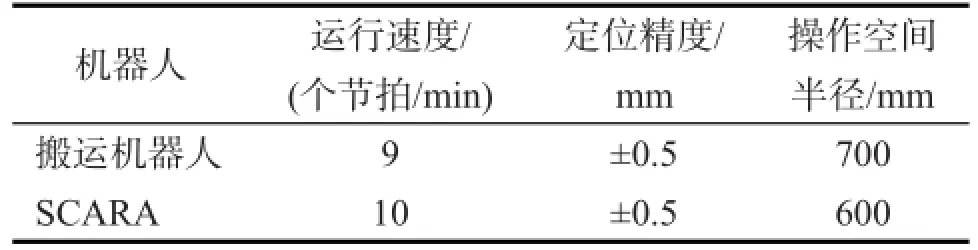
表1 机器人分拣装盒结果比较Tab.1 Results of Comparison of robot sorting box
由表1可知:搬运机器人的运行速度为9个节拍/min,SCARA机器人的运行速度为10个节拍/min,搬运机器人的运行速度基本接近SCARA机器人,定位精度均为±0.5 mm,由此可证明该搬运机器人的轨迹规划运动算法的正确性和控制系统设计的合理性;该搬运机器人的操作空间比SCARA机器人的大,表明该搬运机器人结构布局合理,使其操作空间受自身结构因素影响小。为进一步验证该搬运机器人设计的科学性,采用设计的搬运机器人在天一重工有限公司进行机床上下料的搬运操作,搬运过程中其与机床配合协调,达到了该机床加工的响应速度,且定位精度满足天一重工有限公司机床加工的要求。
4 结 论
基于含局部闭链式码垛机器人,设计一种新型三自由度搬运机器人,对其关键技术进行研究,在此基础上加工机器人简化试验模型与机器人本体进行验证,结果表明:
1)该搬运机器人机械结构采用主从分离式三自由度机械手,改善了重要零部件的受力,且机器人的操作空间更大,另外主从分离式的结构简单,降低了机器人的制造成本;
2)采用修正梯形模式的速度、加速度和位移方程进行轨迹规划的运动算法,PC机+PCI运动控制卡+远程扩展模块构成的开放式控制系统平台与基于Win7操作系统和可视化编程软件Labview开发的软件系统,实现了对该搬运机器人的控制;
3)该搬运机器人的运行速度可达9个节拍/min,末端重复定位误差为±0.5 mm,响应速度快,运行可靠。从而验证了该三自由度搬运机器人结构设计和关键技术的合理性和可靠性。
[1]张利敏,黄田.一种三平动高速并联机械手设计方法研究[D].天津:天津大学,2008:1-4.
[2]刘凤臣,姚赟峰.高速搬运机器人产业应用及发展[J].轻工机械,2012,30(2):108-112.
[3]王海叶.轻型气动平动搬运机械手设计[J].机械制造与自动化,2010(2):167-169.
[4]余晓流,岑豫皖,潘紫薇.并联机器人的理论及应用研究[J].安徽工业大学学报(自然科学版),2003,20(4):291-294.
[5]李晓刚,刘晋浩.码垛机器人的研究与应用现状、问题及对策[J].包装工程,2011,32(3):96-101.
[6]孙英飞,罗爱华.我国工业机器人发展研究[J].科学技术与工程,2012,12(12):2912-2917.
[7]冉红旭,陆迁,邓明华.沃迪搬运码垛机器人营销策略研究[D].咸阳:西北农林科技大学,2014:1-6.
[8]张良安,马寅东,单家正.4自由度含局部闭链式码垛机器人动力学优化设计[J].农业机械学报,2013,44(11):336-341.
[9]檀杰,赵奇平.四自由度物料搬运机械手的研制[D].武汉:武汉理工大学,2011:10-14.
[10]程立艳,费凌.五自由度机械手的抓取设计[D].成都:西华大学,2012:7-13.
[11]耶晓东,曹永涛.夹钳式五自由度机械手的设计[J].建设机械技术与管理,2012(5):122-124.
[12]张良安,梅江平,黄田.基于Petri网络的码垛机器人生产线控制软件设计方法[J].天津大学学报,2011,44(1):23-27.
[13]刘鹏,宋涛.焊接机器人运动学分析及轨迹规划研究[J].机电工程,2013,30(4):390-394.
[14]李玉航,梅江平,刘松涛.一种新型4自由度高速并联机械手动力尺度综合[J].机械工程学报,2014,50(19):32-39.
责任编辑:何莉
Research on Key Technologies of New Three Degrees of Freedom Transport Robot
TAN Yuliang1,TAI Zhaoqin2,WANG Mengtao1,GAO Luwen1,YU Liang1,ZHANG Liangan1
(1.School of Mechanical Engineering,Anhui University of Technology,Ma'anshan 243032,China;2.Anhui Huachuang Intelligent Equipment Co.Ltd.,Ma'anshan 243032,China)
In the traditional SCARA robot engaged in the upper and lower material from the machine,motor and reduction device lie near the end of the execution,which has shortcomings,such as a large space and low efficiency. A new 3 degrees of freedom transfer robot(3-DOF T-robot)was proposed.The robot was set up on the base of the front two joints drive device.Based on this new configuration,the kinematic model was established by means of D-H method.The trajectory planning was created with speed,acceleration and displacement equation with modified trapezoid pattern.The three-dimensional model of the robot was built with SolidWorks software.Then,a simplified robot model and robot body were produced,and the point-to-point motion comparative test and transfer test were simulated.The results show that the physical design of 3-DOF T-robot can effectively reduce the end mass,increase the operating space,and meet the requirements of common functions such as carrying and sorting.
transfer robot;structure design;kinematic model;path planning
TP242.2
A
10.3969/j.issn.1671-7872.2016.01.010
1671-7872(2016)-01-0044-05
2015-03-23
国家科技重大专项(2011ZX04013-011)
谭玉良(1990-),男,安徽太和人,硕士生,研究方向为工业机器人的设计与控制。
张良安(1981-),男,浙江杭州人,博士,副教授,研究方向为工业机器人的设计与控制及自动化生产。
