面向3C产品装配的高速冗余度机器人系统研究
2016-07-05刘玉斌
刘玉斌,戴 骞
(哈尔滨工业大学 机器人研究所,哈尔滨 150001)
面向3C产品装配的高速冗余度机器人系统研究
刘玉斌,戴骞
(哈尔滨工业大学 机器人研究所,哈尔滨 150001)
摘要:针对3C产品高速装配领域,以平面3R冗余度机器人为研究对象,提出了一种驱动单元集中布置的传动方案,保证了机器人的快速性和稳定性.在SolidWorks环境下,对平面3R冗余度机器人进行了三维模型设计,并联合Matlab软件中的SimMechanical插件完成机器人动力学建模及分析.采用D-H方法建立平面3R冗余度机器人运动学模型,基于此模型提出了一种针对冗余度机器人的避障路径规划算法,利用冗余运动链的自运动在零空间实现障碍回避.通过对平面3R冗余度机器人的仿真实验验证算法的有效性.
关键词:冗余度机器人;运动学;动力学;高速;避障
目前3C产品的装配工作一般由人工完成,为提高装配效率和装配质量,各大代工厂商开始引入高速轻载机器人[1-2]协助完成产品的装配任务.目前平面型机器人一般都采用伺服电机带减速器直接驱动机器人关节回转的传动方案[3],但在高速运动时此类传动方案可能造成定位精度下降等问题[4].而且由于装配流水线空间狭小,同一流水线上的工作人员和机器人工作空间相互重叠,再加之此类机器人的工作速度较大,使得人机协作的风险大大增加[5].和传统的平面型机器人[6]相比,平面3R冗余度机器人拥有更多的自由度,使其拥有更高的灵活性,而其零空间自运动[7]的特性,更是让其可以轻松的实现对障碍物的回避[8-9].本文从改善机器人高速运动性能方面出发,提出了一种驱动单元集中布置的传动方案,将驱动单元集中布置在基座附近,通过同步齿形带驱动后续关节的回转,并完成机器人本体三维建模.在此基础上建立机器人动力学运动学模型,并提出了一种冗余度机器人避障规划算法.最后通过仿真实验证实了该算法的有效性.
1总体传动方案设计及动力学建模
1.1总体传动方案设计
目前平面关节型机器人主要采用伺服电机带减速机直接驱动关节旋转的传动方式,然而对于小型高速平面关节型机器人来说,由于悬臂太长造成机器人重心远离基座,高速运动时重心不稳,机器人容易发生震颤.并且关节轴1以后的驱动单元远离基座,机器人各连杆变形量会对机器人精度有相当的影响,再者对于高速运动的机器人,从运动到停止的过程.需要克服较大的转惯量,有可能造成各关节出现位置偏差从而影响机器人的定位精度.所以本次设计中采用所有驱动单元集中布置在基座正上方,通过同步带带动关节轴2和关节轴3的回转运动.本次设计的冗余度机器人图1所示,关节2和关节3的驱动单元安装在基座上方,通过同步齿形带将运动传递至关节轴,从而实现关节的回转运动.
显然改进后的驱动单元布置形式,显然机器人重心靠近基座处,转动惯量明显减小从而避免了机器人在高速运动时可能出现的震颤现象,稳定性更好,并且启停时的精确控制更加容易,机器人定位精度更高.
各关节的传动链如下所示:
连杆1旋转(1轴):直流伺服电机1→双段式行星减速机→连杆1
连杆2旋转(2轴):直流伺服电机2→双段式行星减速机→同步齿形带1→连杆2
连杆3旋转(3轴):直流伺服电机3→双段式行星减速机→同步齿形带2→同步齿形带3→连杆3
1.2动力学建模
首先使用Solidworks完成机器人的三维建模,模型如图2所示.
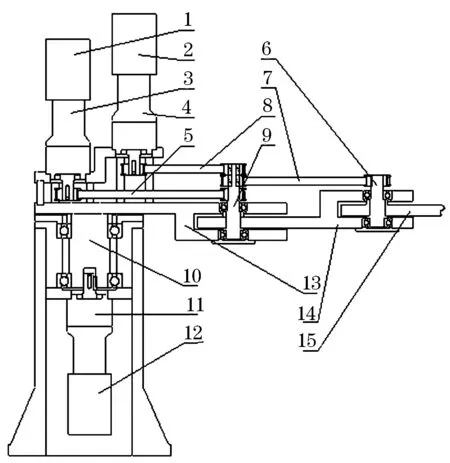
图1 机器人传动示意图1—伺服电机2; 2—伺服电机3; 3—双段式行星减速机2; 4—双段式行星减速机3; 5—同步齿形带1; 6—关节轴3; 7—同步齿形带3;8—同步齿形带2;9—关节轴2;10—关节轴1;11—双段式行星减速机1;12—伺服电机1;13—连杆1;14—连杆2;15—连杆3
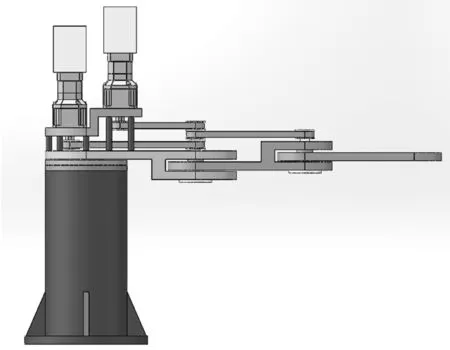
图2 机器人3D模型
随后该讲将该模型导入到Matlab中,建立动力学模型并与Matlab中的SimMechanics进行动力学联合仿真.图3为基于SimMechanics的平面3R冗余度机器人的仿真系统框图.
加载在关节上的关节例力矩分别为
τ1=10sint(N·M)
τ2=5sint(N·M)
τ3=0.05sint(N·M)
仿真时常为1 s,可以得到各关节的角加速(rad/s2)曲线如图4所示.
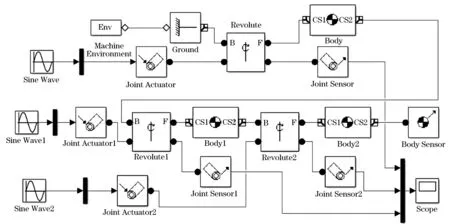
图3 动力学仿真模型
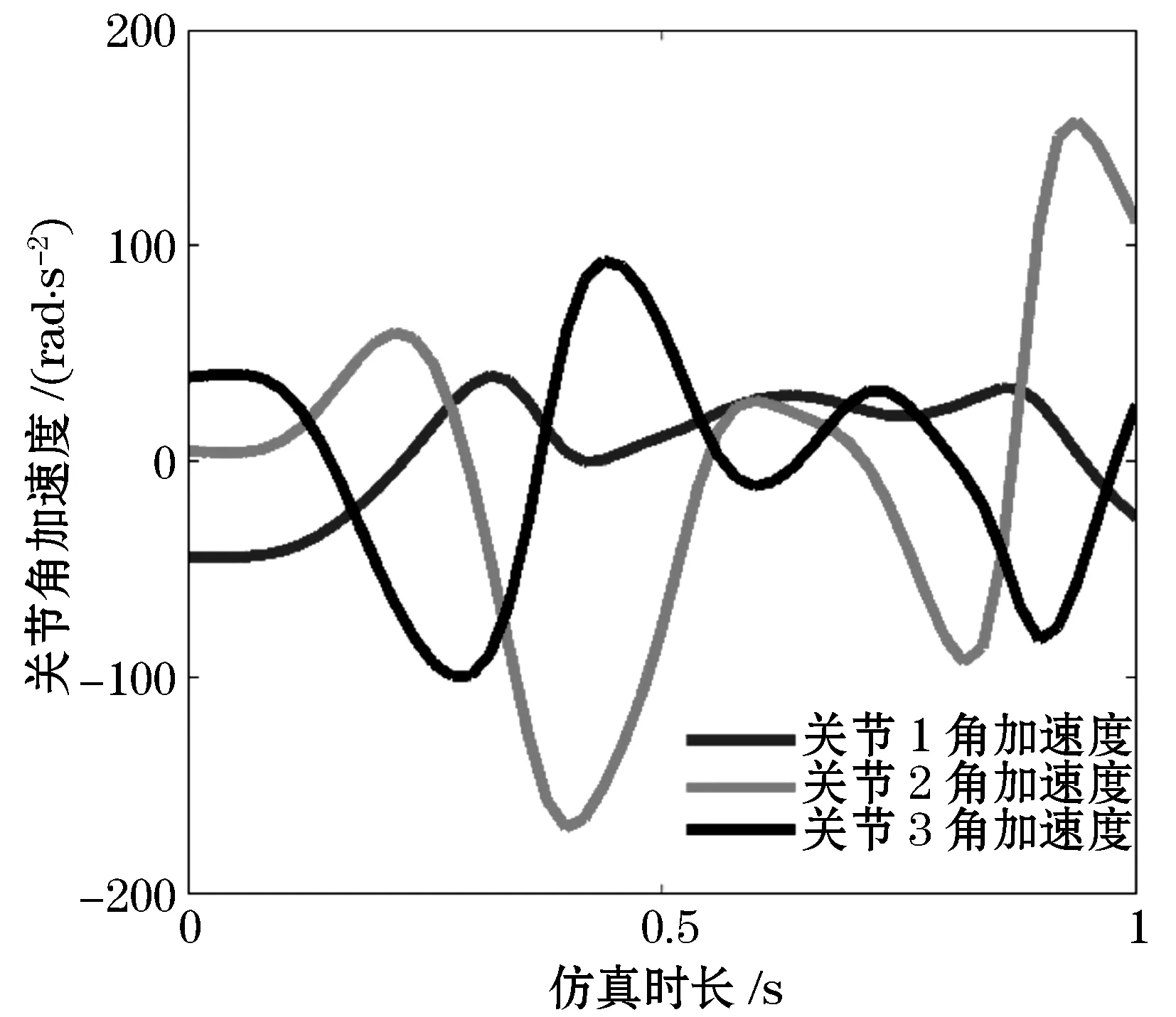
图4 各关节加速度曲线
2运动学建模
平面3R冗余度机器人每根连杆的长度均为200 mm,即L1=L2=L3=200mm则机器人D-H参数如表1所示.
表1机器人D-H参数
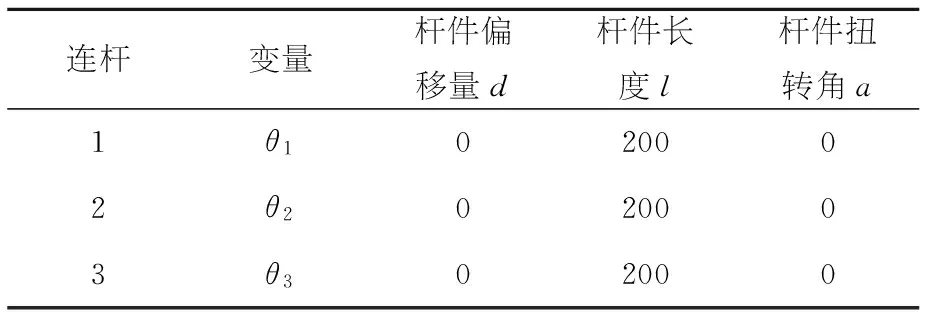
连杆变量杆件偏移量d杆件长度l杆件扭转角a1θ1020002θ2020003θ302000
表中参数满足
-180°≤θ1≤180°
-160°≤θ2≤160°
-160°≤θ3≤160°

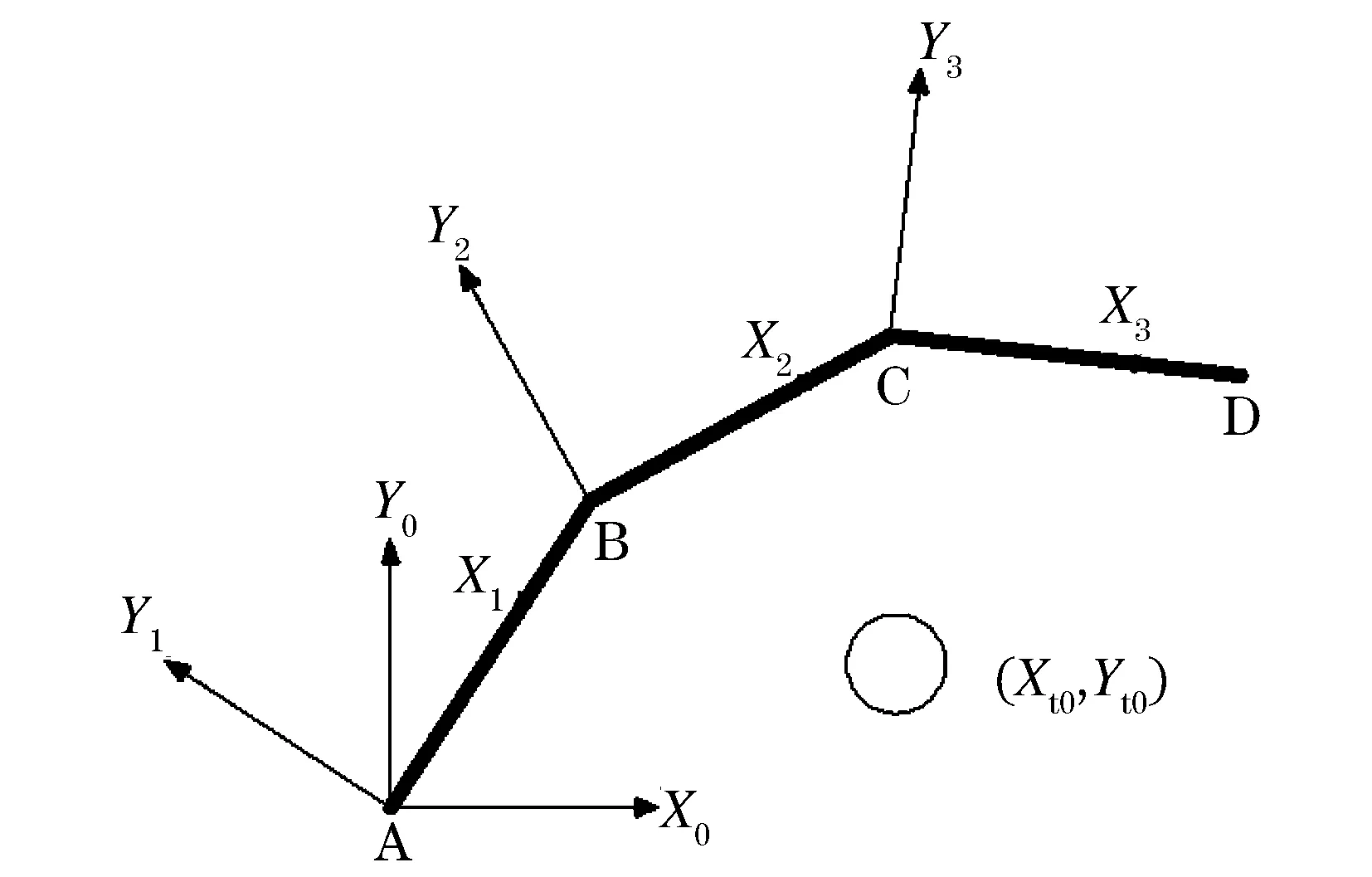
图5 坐标系相对位置关系
平面3R冗余度机器人末端位置为
由于该机器人在平面上运动,z方向可以忽略,则末端位置为
p=200
其雅可比矩阵为
J=200
其中:sabc=sin(θa+θb+θc),
cabc=cos(θa+θb+θc).
3避障路径规划
假定障碍物在基座坐标系中的坐标为(xt,yt),则连杆AB的方程可以写成
(x-xA)/(xB-xA)=(y-ya)/(yB-yA)
(1)
过圆心点(xt,yt)并垂直于连杆1的直线方程为
(y-ya)/(xB-xA)=(xA-x)/(yB-yA)
(2)
将两式联立解出碰撞点(xs,ys)进一步得出距离
(3)
然后依据上述方法计算d2、d3,从而得出最小距离
dmin=min{d1,d2,d3}
(4)
连杆上的可能发生碰撞点S的位置为(xs,ys),且S点处的雅可比矩阵Js满足
(5)
根据梯度投影法有冗余度机器人逆解为
(6)
可得零空间避障函数
(7)
那么基于梯度投影法的冗余度机器人避障运动学逆解为
(8)

由于(I-J+J)的特殊性,可以引入避障系数a代替其简化计算.为了得到更好的避障效果,引入避障增益b,则上式可写成
(9)
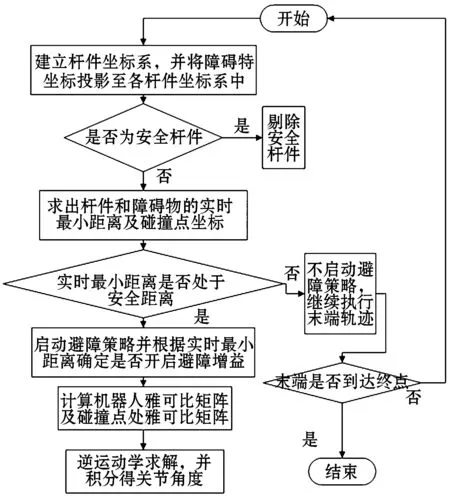
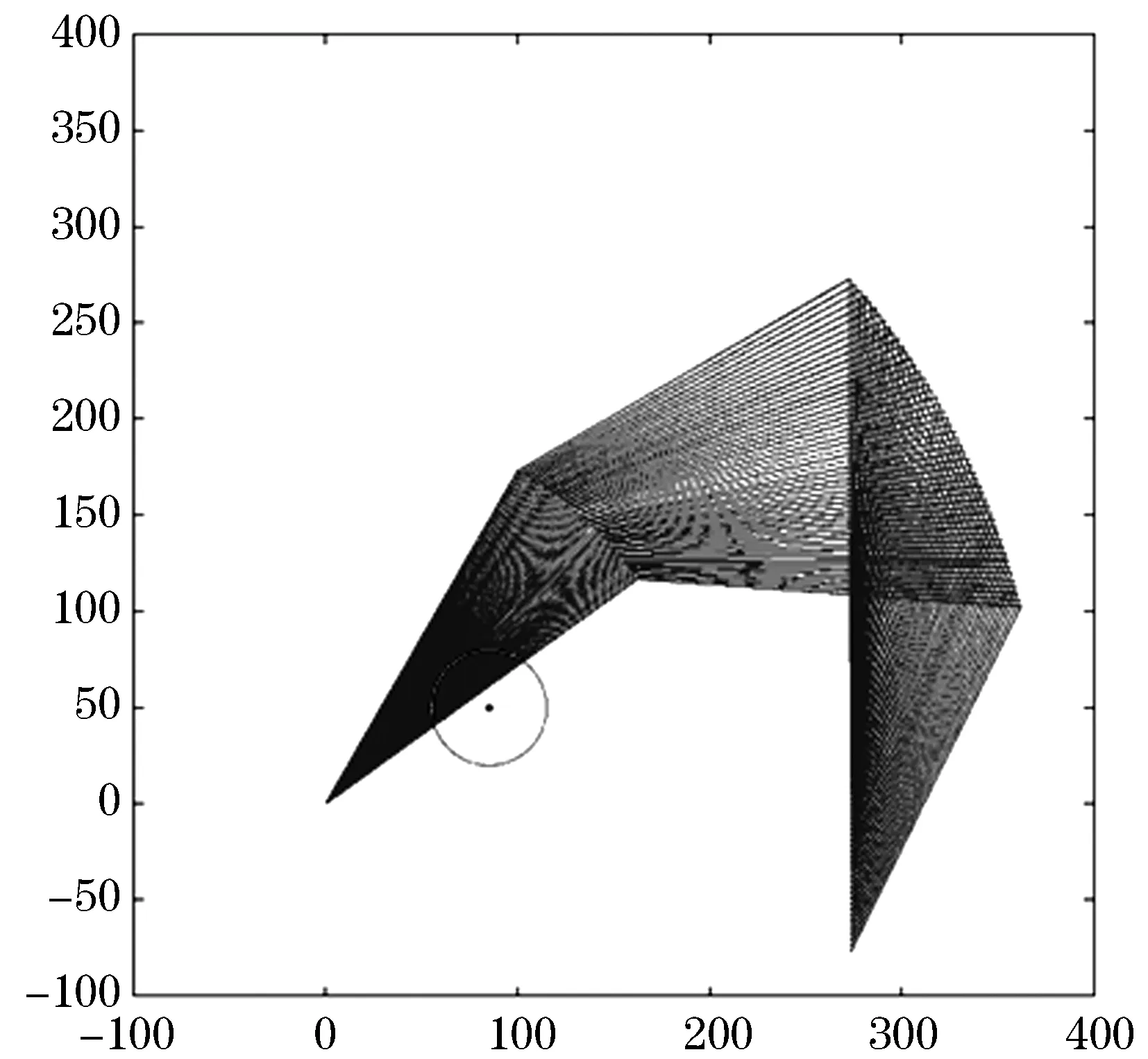
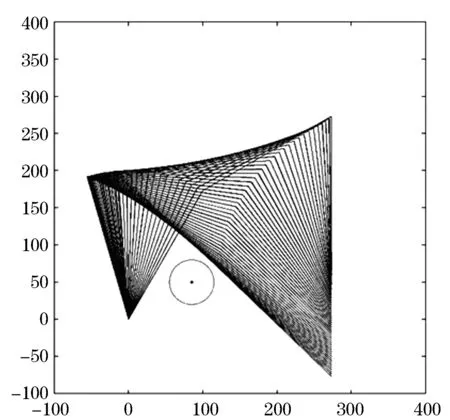
上式中系数a,b和实时最小距离dmin有关,这里先定义两个距离d1 (10) 冗余度机器人避障路径规划的流程图如图6所示. 图6 避障路径规划流程图 4仿真实验及结果分析 为了证实上述所提方案的正确性,将该方案应用于平面3R冗余度机器人上,在MATLAB2014A的软件环境下进行仿真实验.初始关节角θ1=60°,θ2=-60°,θ3=-120°,障碍物静止在(85,50)处,规划机器人末端沿着Y轴、以30mm/s的速度竖直向下运动,规划总时间为5s. 未采取避障策略前,机器人运动轨迹如图7所示,显然未避开障碍物. 图7 避障优化前运动轨迹 采取避障策略后,机器人运动轨迹如图8所示,显然机器人在避障的同时,末端位置没有收到影响,和未进行避障路径规划时末端运动轨迹一致,并且很好的完成了对障碍的回避. 图8 避障优化后运动轨迹 4结语 本文针对高速运动的平面型机器人提出了一种新的传动方案,该方案将分散布置的驱动单元集中到基座附近,从而减小了各关节启停时需要克服的转动惯量,提高了机器人定位精度,并且使机器人的重心更加靠近基座,使其获得更加优越的快速性和稳定性. 避障问题是机器人人机协作过程中必须解决的关键问题之一.针对冗余度机器人的避障问题,引入和实时最小距离相关的两个避障参数,利用冗余运动链的自运动特性完成对障碍物的回避.仿真实验结果表明,本文提出的算法可以使机器人在顺利、平稳的完成障碍物回避的前提下,仍然精确的完成预定轨迹的跟踪. 参考文献: [1]YAMATAKAM,KUGAT,TAKAYAMAT, et al.RobotassemblysystemforLCDTVusingcooperativeforcecontrol[C]//34thAnnualConferenceoftheIEEEIndustrialElectronicsSociety, 2008.3443-3448. [2]ANGELESJ,MOROZOVA,NAVARROO.AnovelmanipulatorarchitecturefortheproductionofSCARAmotions[C]//IEEEInternationalConferenceonRoboticsandAutomation, 2000.2370-2375. [3]蔡自兴, 谢斌. 机器人学[M]. 北京: 清华大学出版社, 2015.1-18. [4]LIYANAGEMH,KROUGLICN,GOSINER.DevelopmentandtestingofanovelhighSCARAtypemanipulatorforroboticapplication[C]//Shanghai:IEEEInternationalConferenceonRoboticsandAutomation, 2011.3236-3242,. [5]XIONGGL,CHENHC,LIANGFY, et al.Researchanddevelopmentstatueofphysicalhuman-robotinteraction[J].OpticsandPrecisionEngineering, 2013, 21(2): 356-370. [6]GEONEAI,MARGINEA,UNGUREANUA.Studyuponthedynamicanswerofplanemanipulators[J].AdvancedMaterialsResearch, 2011, 463-464: 1304-1308. [7]KANGHJ,FREEMANRA.Nullspacedampingmethodforlocaljointtorqueoptimizationofredundantmanipulators[J].JournalofRoboticSystems, 1993, 10(2): 249-270. [8]MAS,HIROSES.Adynamicapproachtoreal-timeobstacleavoidancecontrolofredundantmanipulators[J].JsmeInternationalJournal, 1996, 39(2): 317-322. [9]CHOISI,KIMBK.Obstacleavoidancecontrolforredundantmanipulatorsusingcollidabilitymeasure[J].Robotica, 1999, 18(1): 143-151. A novel obstacle and singularity avoidance path planning algorithm for redundant robots LIU Yu-bin, DAI Qian (Robotics Institute, Harbin Institute of Technology, Harbin 150001, China) Abstract:In order to improve the rapidity and stability of the manipulator in the 3C product high-speed assembly areas, a drive unit concentrate arrangement transmission scheme was presented for plane 3R redundant manipulator. Designed 3D solid model with environment of the SolidWorks and the manipulator dynamic model are established by the union of SolidWorks and SimMechanical in Matlab to simulate the dynamic performance. Denavit-Hartenberg method was used to derive the kinematic model of plane 3R redundant manipulator and an obstacle avoidance of redundant robot path planning method is presented based on the kinematic model and completed the obstacle avoidance based on the self-motion of the redundant manipulator on a null space. Through simulation of a 3-DOF redundant manipulator, the scheme proved to be feasible and effective. Key words:redundant manipulator; kinematics; dynamics; high-speed; obstacle avoidance 收稿日期:2015-11-28. 基金项目:国家科技支撑计划课题(2015BAF10B02) 作者简介:刘玉斌(1956-),男,副教授,研究方向:机器人技术. 中图分类号:TP242 文献标识码:A 文章编号:1672-0946(2016)03-0281-05