基于LabVIEW的自主巡航与遥控双功能智能小车研发
2017-01-20罗培键戴博聪
罗培键 戴博聪

摘 要:本文介绍了一种基于LabVIEW的智能小车的设计,其可以实现自主巡航与遥控两种功能,并可以在两种功能间进行切换。利用超声波传感器和红外对管传感器,通过Arduino编程和LabVIEW编程编写避障循迹算法,实现自主巡航功能。利用WiFi无线通信模块,通过与上位PC机的通信,实现对智能小车的远程控制。根据不同的情况采用不同模式,极大地提高循迹和避障效果,可以使小车在复杂的环境下能更好地作业。
关键词:LabVIEW;Arduino;寻迹;避障;智能小车
中图分类号:TP242 文献标识码:A
0.引言
由于现在科技的不断进步,所以各个行业也在有着不同程度的发展,其中,智能汽车这一项目,也有着很大程度的发展。
在智能汽车这一项目中,最为重要并且同时也在进行着更新的是智能小车这一项目。首先,为了适应现在社会中,不断在进行着变化的科学技术,各种集合了各个方面的科技活动,也在慢慢地增加起来,在这些活动之中,并不缺少关注着的人群。其中,机器人比赛的这一科技活动,已经取得了很大的成功,并且也已经举办的越来越隆重,比赛方式也已经越来越多样化了。因此,所参加这一比赛的参赛人员,也越来越多了,而这一比赛的主要目的就是,为了能够制作一辆能够自己认识道路的智能小车,只要在比赛之中遵守比赛规则,那么,最先完成的参赛人员就是最终的成功者。而本文的主要研究内容,就是围绕这一智能机器人比赛所展开的。
对于这一科技来说,所需要考虑的设计方面有很多,其中更是需要涉及各个领域,是需要综合技术的设计。现有的智能小车主要以光电管黑白线循迹智能车为主,这种设计出来的机器,因为现在所知道的算法有限,并不能够达到十分完美的效果。本设计使用Arduino微处理器作为处理核心,使用LabVIEW上位机搭建通信,通过路由器搭建局域网,以红外对管检测模块的循迹智能车为基础,实现了运行路径中的智能避障,同时利用WiFi技术传输速度快,传输距离远,信号稳定的特点,使用我们现在所能够掌握的技术,由此而达到我们所需要的控制。
1.系统硬件设计
1.1 系统整体硬件设计
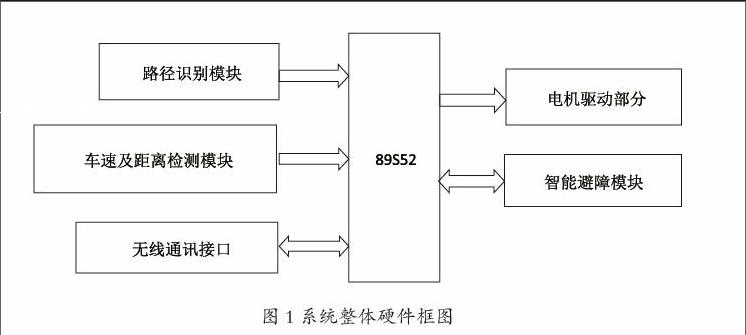
对于智能小车之中的系统来说,硬件主要就是包括了如图1所示的这几种。
1.2 路径识别模块
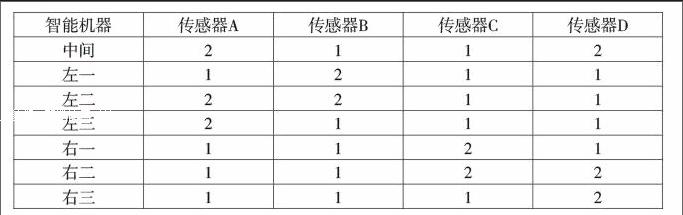
该部分采用红外对管检测模块为循迹机器人提供黑线和白线的追踪,既可以检测白底中的黑线,又可以检测黑底中的白线。选用红外对管检测模块安装在小车车头的底部,这时候,我们就可以通过黑线所在的那个范围,所得到的不同的光线,而确定智能小车所行走的位置。因此,我们就需要4个传感器,由此来确定智能小车的行走位置。根据不同的传感器所显示的不同的光线,由此而得出智能小车所在的位置。
在这些传感器中,使用的最多就是红外对管这一种。因为结合了多方面的对比比较,红外对管这一传感器所具有的性能最好,由此而能够达到最好的检测效果。并且如果将这一传感器使用在智能小车之中的时候,也能够将只能小车最好的性能所表现出来。
在这一红外对管的传感器中,可以从传感器中放射出光线,然后使得黑线能够接收到这一放射出来的光线,由此而做出相对应的改变。同时,加以对这一传感器传出的放射光线进行一定的数据对比比较,通过不同的数据的对比比较,我们由此可以得到相对应的,关于传感器的结论。如果在实验中,遇到了一定的不确定干扰因素,那么我们就可以使用射极跟随器以此来减少我们在实验之中所受到的干扰。
1.3 车速及距离检测
为了证实我们的检测结果,对此我们做了关于车速以及距离的测试。首先,我们需要一辆车轮长为16cm的小车,然后在小车滚动的时候安装磁钢在车轮之中,接着绑好传感器。这样,小车在前行的时候,小车车轮进行滚动,而传感器也会接收到所相对应的数据,接着,我们就可以针对这些数据而来进行数据的对比比较,从而得出一定的结果。
1.4 智能避障的实现
当然,如果智能小车在遇到有东西放在智能小车所需要经过的道路之中的时候,这就造成了智能小车只能原地走动了。而下面所进行的试验,就是测验智能小车如何才能在一定的前提之下,躲避开这些阻挡小车前进的东西。
首先,我们需要一台超声波传感器,以便能够为我们的智能小车检测智能小车前面是否有东西放在智能小车将要路过的地方。因为,当智能小车前方路过的路上有东西阻挡的时候,超声波传感器所传来的超声波,会有一定的变化。当这一不同的超声波由超声波传感器,传给智能小车之后,智能小车进行接受,再经过一定技术的解码,这样就可以得到适当时机的处理了。
同时,由于智能小车不可能看到自己在行驶的道路之中的时候,身边是否有什么阻挡的东西放在智能小车的身边,这个时候就需要红外传感器。当智能小车前进的时候,身边所经过的道路中,有什么东西在进行阻碍的时候,红外传感器就会给智能小车发出一定的信息,而智能小车得到这个信息之后,就会在适当的时候,巧妙地避开阻挡在小车路上的东西。这样智能小车就可以在,红外传感器的作用之下,在不撞到阻挡在智能小车前进道路上的东西,而安全有效地继续前进了。
1.5 无线通信模块
在这一设计中,合理地使用通信设备也是十分重要的。而对于我们来说,通信的方式,主要也就分为两种,也就是无线以及有线。
首先,需要简单介绍下有线的通信方式。这一通信方式,仅仅只是需要智能小车与电脑进行相对应的连接就可以了。有线通信这一通信方式,最大的好处就在于,可以简单方便地进行操作,因此也能够十分简单的得到我们所需要的实验数据。但是也并不是一点对于操作方面的要求都没有,在操作方面,接串口线对于大部分的实验者来说,是一个并不简单方便的操作。而对此,使用无线通信的这一通信方式就变得更加适合了。因为无线通信的这一通信方式,对于智能小车和电脑的链接,更够起到更好的作用。
接着,所需要介绍的就是无线的通信方式。对于无线通信的这一通信方式,我们主要需要的是安装一个无线的通信模板。然后经过一定的通信设计,由此而达到我们做需要的目的。但是无线通信的这一通信模式之中,无线通信模板并不能够直接与电脑进行相对应的连接。在无线通信模板与电脑之间进行连接的时候,需要我们另外插入一个接口电路,然后,无线通信这一通信才能与电脑进行连接。具体的通信设计方式,如图2所示。
2.系统软件设计
智能小车软件部分包括电脑终端控制模块和小车端控制模块两个部分:电脑端软件用于接受、处理小车端发出的运行信息,以及向小车端发送控制命令;小车端软件用于处理传感器单元的检测信息和电脑端的控制命令。
2.1 小车端控制模块设计
小车端控制模块由主程序和中断子程序(包括避障判断及处理、无线通信)两部分组成。无线通信子程序和避障子程序采用定时器T0中断的形式。当T0中断到来时,小车向电脑终端发送其当前运行状态信息,并处理超声波传感器的信号。当无障碍物时中断返回,继续执行主程序。当超声波传感器检测到障碍物时进行避障算法外理。本程序和子程序流程图如图3所示。
2.2 电脑端程序设计
该模块程序采用Windows XP下的Arduino编程和LabVIEW编程实现。
结论
本文介绍了一种可以通过无线方式对小车进行遥控和自主模式进行切换的智能小车设计,其在自主模式下可以实现循迹和避障功能,当小车无法成功实现避障时,则可通过无线通信模块控制小车脱离障碍区。通过小车的人工遥控和自主循迹模式的结合,改变了传统的小车的单纯遥控功能的单一性能,其中,增加循迹和避障传感器的数量能进一步对循迹和避障的算法进行细化分析,极大地提高循迹和避障效果。人工遥控和自主巡航的有机结合,可以使小车在复杂的环境下能更好地作业。同时,本硬件设计中的无线通信模块,可以与上位PC机进行通信,对小车进行远程遥控操作,进行人机交互技术等相关技术的研究。
在硬件设计中,如测距传感器方面,本系统采用超声波传感器和红外对管传感器,在今后的设计中可考虑增加其他传感器,比如增加CCD图像传感器,这样更有利于提高小车实时导航的准确性,从而可以显著提高小车的运行速度,也可以在监控等方向使用,这样就为智能小车的实际运用拓展了领域。自主定位方面,本文使用的基于里程计的自主定位,它在较长距离路径统计时误差较大,可增加角度传感器来精确确定小车行进过程中角度的变化,提高长距离路径统计中的精确度。
参考文献
[1]罗礼进,肖臣鸿,刘星,等.基于“STC80C51单片机”的智能小车系统的设计[J].电脑知识与技术,2016(17):172-173+191.
[2]程虹霞,骆云志,朱松柏,等.多传感器信息融合技术在无人平台避障中的应用[J].兵工自动化,2010(6):89-91.
