基于STM32芯片的移动机器人的避障研究
2016-12-21徐鼎新符秀辉
徐鼎新++符秀辉
摘 要 随着移动机器人走进千家万户,针对移动机器人的路径规划以及如何规避障碍物,提出了一种基于ARM Cortex-M3内核的STM32单片机控制超声波传感器以及舵机进行机器人避障的解决方案。分析了由微处理器如何控制机器人使其产生避障行为,使其在某些障碍物环境下绕出狭窄区域;使其顺着障碍物前进直到开阔地带。实验结果表明,本系统电路简单,抗干扰性强,测量精度高。此方案能够稳定的控制移动机器人进行有效的避障,验证了该方案的的实时性和可行性。
【关键词】移动机器人 STM32单片机 超声波传感器 避障
1 引言
随着近几年来机器人技术的快速发展,机器人产业已展现出强大的生命力。机器人的应用领域不断扩大如:生活服务与娱乐,军事侦察,科学探测,工农业生产等等。机器人的性能逐渐提高并且正在向智能化方向发展。移动机器人作为新型的劳动工具,在改变劳动模式,提高劳动效率,减轻劳动强度等方面展现出极大的优越性。伴随着人工智能技术、电子技术、计算机技术、传感器技术、驱动技术及机器人技术的飞速发展,室内移动机器人控制系统的更高层次的研究和开发已具备了十分坚实的基础和较好的发展前景。目前对室内移动机器人影响比较大的重要技术是:传感器技术、噪音控制技术、自动清洗技术、清洁空间高度较低区域的技术和自动避障路径规划技术。本文提出了一种基于STM32单片机对移动机器人自动避障规划的解决方案。探讨了移动机器人的避障原理,详细的研究了系统的硬件设计,软件流程。对实验结果进行了分析后证明本方案电路简单,抗干扰性好,测量精度完全满足移动机器人的避障要求。
2 移动机器人避障系统硬件介绍
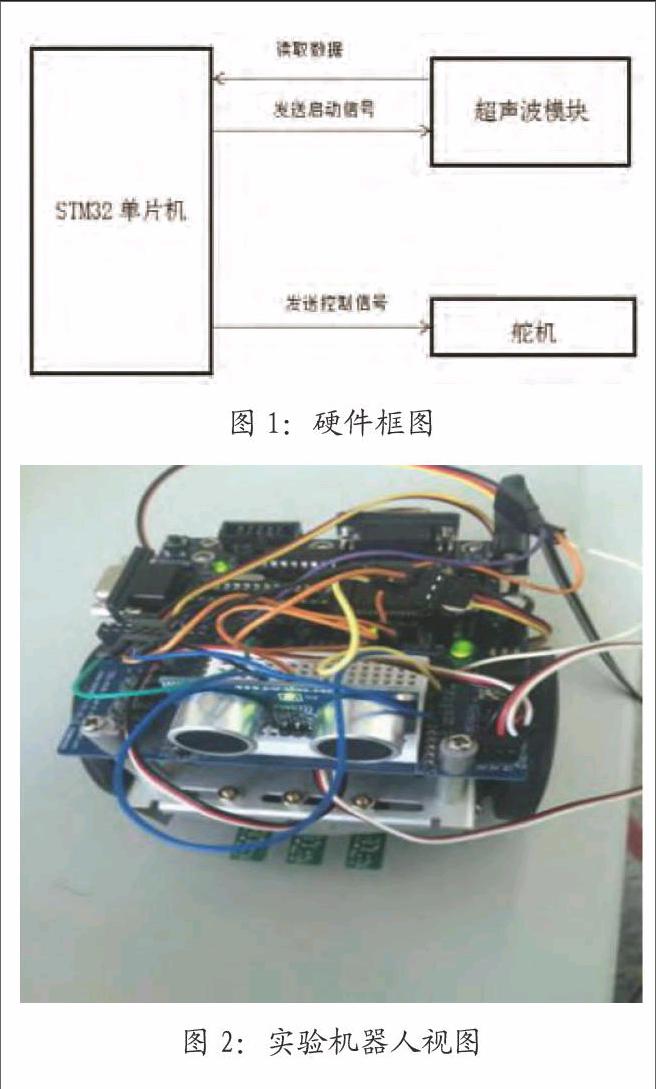
移动机器人的避障系统主要由舵机与超声波模块构成,超声波模块安装在舵机之上。为使移动机器人能够自动避障,使用超声波进行避障,通过超声波接收到的信号,判断出障碍物的位置情况来进行多个方向的避障,在行进的过程中,机器人对前方的障碍物进行检测并根据障碍物的情况做相应的转弯,并改变舵机的旋转方向并重复前面的行进过程。
由于超声传感器存在固有测量盲区,对近距离内的障碍物无法检测,因此本文采用红外传感器弥补超声波传感器的测量盲区。处于超声波传感器的两端。图1为移动机器人避障系统的硬件设计框图。图2为本实验所使用机器人。
3 移动机器人的避障方案
3.1 移动机器人的避障方案
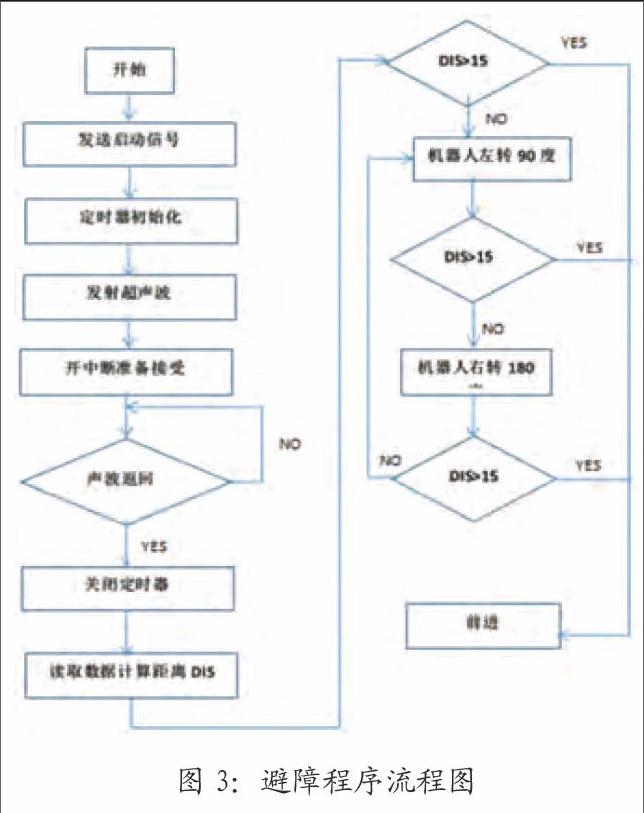
当移动机器人开始工作时,先使机器人绕房间行驶一周,测量出擦地区域的长和宽,并计算出清洁区域的面积,记录下最大的X轴与Y轴的行进距离。限定以后行驶路径的范围。之后将移动机器人放在需测量的初始位置,然后沿y轴正向前进,当机器人运行前面出现障碍物时,该机器人的避障系统便会测定障碍物的位置,STM32芯片便会产生中断进入中断程序,在中断程序内调整舵机方向使机器人转弯,机器人会绕过障碍物并继续前进。若机器人的前方没有障碍物移动机器人会绕着测量区域进行往返运动直到之前测量所记录下的X轴Y轴的最大位置为止。图3为避障程序流程图。其中DIS为机器人与障碍物之间的距离,单位为cm。
3.2 机器人的避障实验的实现
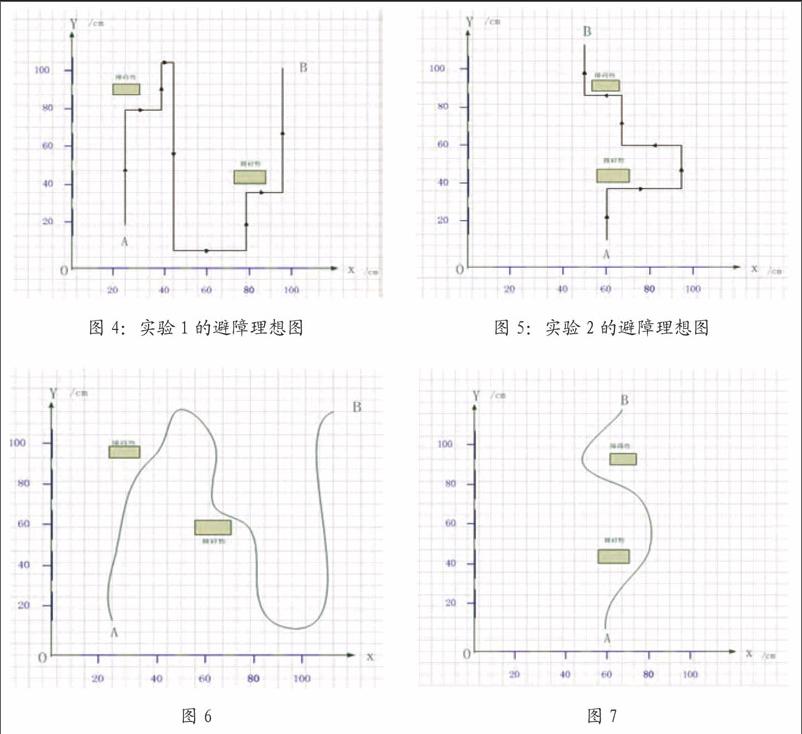
实验环境的搭建,需要黑色电工胶布、足够白的白板与障碍物的完美契合。首先将黑色电工胶布围成一个矩形,但是在矩形的四角要做成圆弧形状,以便于机器人更加顺利的转弯。与此同时,在矩形的区域内放上两个障碍物,需要强调的是两个障碍物必须成规则方块状,在实验区域内随机摆放。分别做两次实验:1两障碍物在区域内成45度角,其中一个障碍物在机器人正前方,另一个障碍物在其右下方。机器人在区域内的A点到达预定目标B点。 2 两障碍物在区域内一前一后放在机器人前面,让其穿过两障碍物从A运动到B点。
其后,将移动机器人放在无障碍物的一个黑色角落上,随即启动电源开关。顺时针行走时,可以明显的观察到机器人沿着黑色电工胶布前进,当遇到拐角时可以自动右转,当遇到障碍物时,先是左转90度,然后再次遇到障碍物,随后右转180度,机器人未检测到障碍物,继续沿着黑色电工胶布轨迹前进。
当机器人在遇到下一个无障碍弧度拐角时,机器人将继续依照舵机上的超声波传感器接收到的信号进行小幅度左转,然后才会转弯。图4为实验1的机器人理想避障图,图5为实验1的机器人理想避障图。
4 实验结论
在图6为机器人在区域左下角A点出发途径两个障碍物到达右上角B点的轨迹。
在图7中实验难度有所增加,由区域正下方A点到区域正上方B点 机器人必须由障碍物中间穿行。
由以上实验可知,整个系统的设计以STM32单片机为核心,利用了超声波避障传感器,将软件与硬件相结合可以实现以下功能:移动机器人在行驶的过程中能够实现直道和弧形轨道的前进,若有偏离能够自动纠正,返回到预设轨道。 当机器人探测到前方检测的障碍物可以自动的调整躲避障碍物,从无障碍的区域通过。
参考文献
[1]蒋新松.机器人学导论[M].沈阳:辽宁科学技术出版社,1994:511-516,543-554.
[2]朴松昊,洪炳熔.一种动态环境下移动机器人的路径规划方法[J].机器人,2003,25(01):18-21.
[3]彭艳,顾国昌.基于遗传算法的水下机器人大范围路径规划[J].应用科技,2003,30(02):18-21
[4]刘义,张宇.基于改进人工势场法的移动机器人局部路径规划的研究[J].现代机械,2006(06):48-50.
[5]马艳 ,刘华波,徐淑华. 室内清洁机器人路径规划的设计[J].机械与电子,2008(07):64-67.
作者单位
沈阳化工大学信息工程学院 辽宁省沈阳市 110142
