仿生六足机器人单腿控制系统
2016-07-05才国锋刘玉斌
才国锋,张 赫,陈 杰,刘玉斌,赵 杰
(哈尔滨工业大学机器人技术与系统国家重点实验室,哈尔滨 150080)
仿生六足机器人单腿控制系统
才国锋,张赫,陈杰,刘玉斌,赵杰
(哈尔滨工业大学机器人技术与系统国家重点实验室,哈尔滨 150080)
摘要:对仿生六足机器人单腿进行了运动学分析,计算了足端位置与关节角位置之间的关系.关节由直流伺服电机驱动,采用电流环和位置环双层控制结构,电流环采用PI控制,位置环采用PID控制,在Simulink仿真中调整控制参数,使位置环的阶跃响应迅速并且超调振荡较小.采用三次多项式实现轨迹规划,使位置、速度和加速度都连续,保证了运动的平稳性.
关键词:仿生机器人;运动学分析;直流伺服电机控制;轨迹规划
轮式机器人和履带式机器人能够在平坦的地面上表现出良好的运动能力,但是在地球以及外部星球的大部分地面都是非平坦的、非结构化的地面,这时,轮式和履带式机器人的运动能力就不能很好的发挥,甚至有些地形都无法行走[1-3].足式机器人特别是六足机器人能够很好的克服轮式和履带式机器人的上述缺点,能够实现在复杂、非结构化的地面环境中实现稳定地行走.
在仿生六足机器人的运动过程中,单腿运动控制是其进行复杂运动控制的基础[4-6],仿生六足机器人的每条腿都由三个旋转关节构成,是一个三自由度的串联机械臂,六条腿的结构完全相同,保证了良好的互换性.每个关节都由直流伺服电机驱动.首先建立直流伺服电机的数学模型,在此模型的基础之上,建立电机转子电流的控制算法,采用PI控制.在电机转子电流控制的基础之上,建立位置控制算法,采用PID控制.最后为保证仿生六足机器人单腿运动的连续性,采用三次多项式规划关节轨迹[7-8].
1本体结构
仿生六足机器人本体的机械结构如图1所示,仿生六足机器人由躯干和六条结构完全相同腿组成,腿部采用高度集成的模块化结构设计,由基节、股节和胫节组成,各个关节的结构也完全相同,保证了机器人具有良好的互换性.躯干里面集成有仿生六足机器人核心控制电路板,躯干-基节关节和基节-股节关节集成有一维力矩传感器,胫节集成有三维力传感器,可以随时监测足端以及各个关节的力以及力矩.仿生六足机器人的多传感器结构设计,为进一步实现其复杂的实时运动控制奠定了基础.
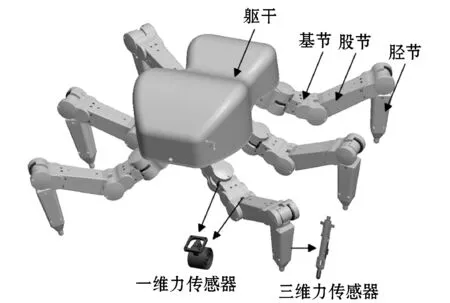
图1 六足机器人本体结构
单腿有躯干-基节关节、基节-股节关节和股节-胫节关节三个关节组成,每个关节处均有一个自由度,因此单腿具有三个旋转自由度.建立D-H坐标系如图2所示,其中O0-X0Y0Z0为基关节坐标系,O1-X1Y1Z1为髋关节坐标系,O2-X2Y22为腕关节坐标系,O3-X3Y3Z3为足端坐标系.各坐标系的建立遵循杆件的坐标系建立规则,同时遵循右手螺旋定则.D-H参数如表1所示.
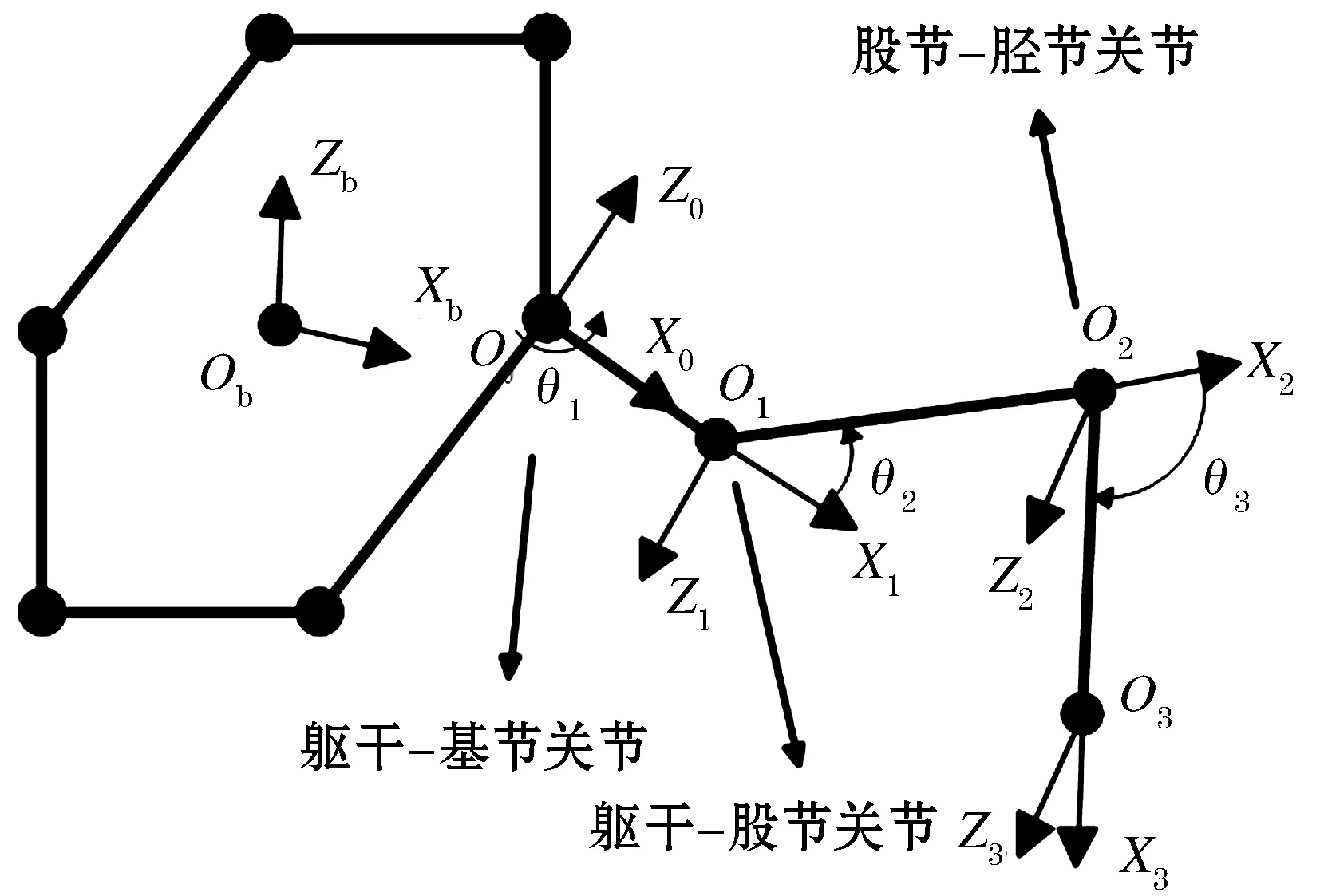
图2 运动学结构
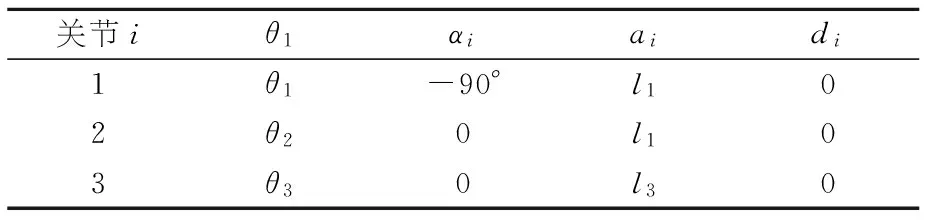
关节iθ1αiaidi1θ1-90°l102θ20l103θ30l30
(1)
其中前三项为躯干坐标系到躯干-基节关节坐标系的变换矩阵,其中x0、y0、z0为O0-X0Y0Z0原点在躯干坐标系中的坐标,l1、l2、l3为基节、股节和胫节的长度,β1、β2为O0-X0Y0Z0相对于Ob-XbYbZb坐标变换的旋转角度.把以上参数均带入公式(1)中可以得到足端点在躯干坐标系中的坐标:
Px=x0-sβ1(l1sθ1+l2sθ1cθ2+l3sθ1cθ23-cβ1sβ2(l2sθ2+l3sθ23+cβ1sβ2(l1cθ1+l2cθ1cθ2+l3cθ1cθ23)
Py=y0+cβ1(l1sθ1+l2sθ1cθ2+l3sθ1cθ23)-sβ1sβ2(l2sθ2+l3sθ23)+sβ1cβ2(l1cθ1+l2cθ1cθ2+l3cθ1cθ23)
Pz=z0-sβ2(l1cθ1+l2cθ1cθ2+l3cθ1cθ23)-cβ2(l2sθ2+l3sθ23)
(2)
仿生六足机器人在实际的运动过程中,需要对足端轨迹进行规划,为了便于在之后的规划足端轨迹的过程中,确定足端运动的前后极限位置的范围,对机器人足端的工作空间采用Matlab进行了仿真计算,仿真结果如图3所示.
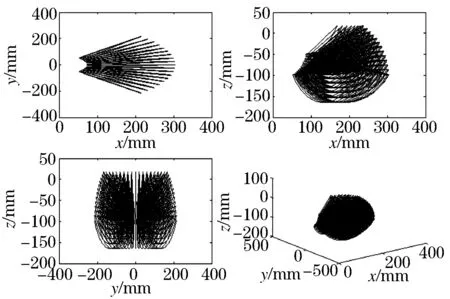
图3 足端工作空间
2直流伺服电机控制
电机控制是仿生六足机器人运动控制的基础,因此首先建立电机控制算法.
2.1直流伺服电机模型
仿生六足机器人单腿关节运动采用ECFlat20直流伺服电机来驱动,所采用的电机驱动器为EPOS2驱动器,控制器为以STM32F407VGT6单片机为核心的,控制器和驱动器之间采用基于CAN总线的CANOpen协议进行通信.STM32F407VGT6单片机通过读写EPOS2驱动器的对象字典来控制电机按照预定要求转动.驱动关节转动的伺服电机的数学模型如图4所示.所使用的电机的参数为电机转子电阻R=28.6 Ω,电机转子电感L=3.09 mH,力矩系数Kt=23.8 mN·m/A,反电动势系数Ke=0.023 754 152 8 V/(rad/s),空载时转子的转动惯量J=5.1 g·cm2.
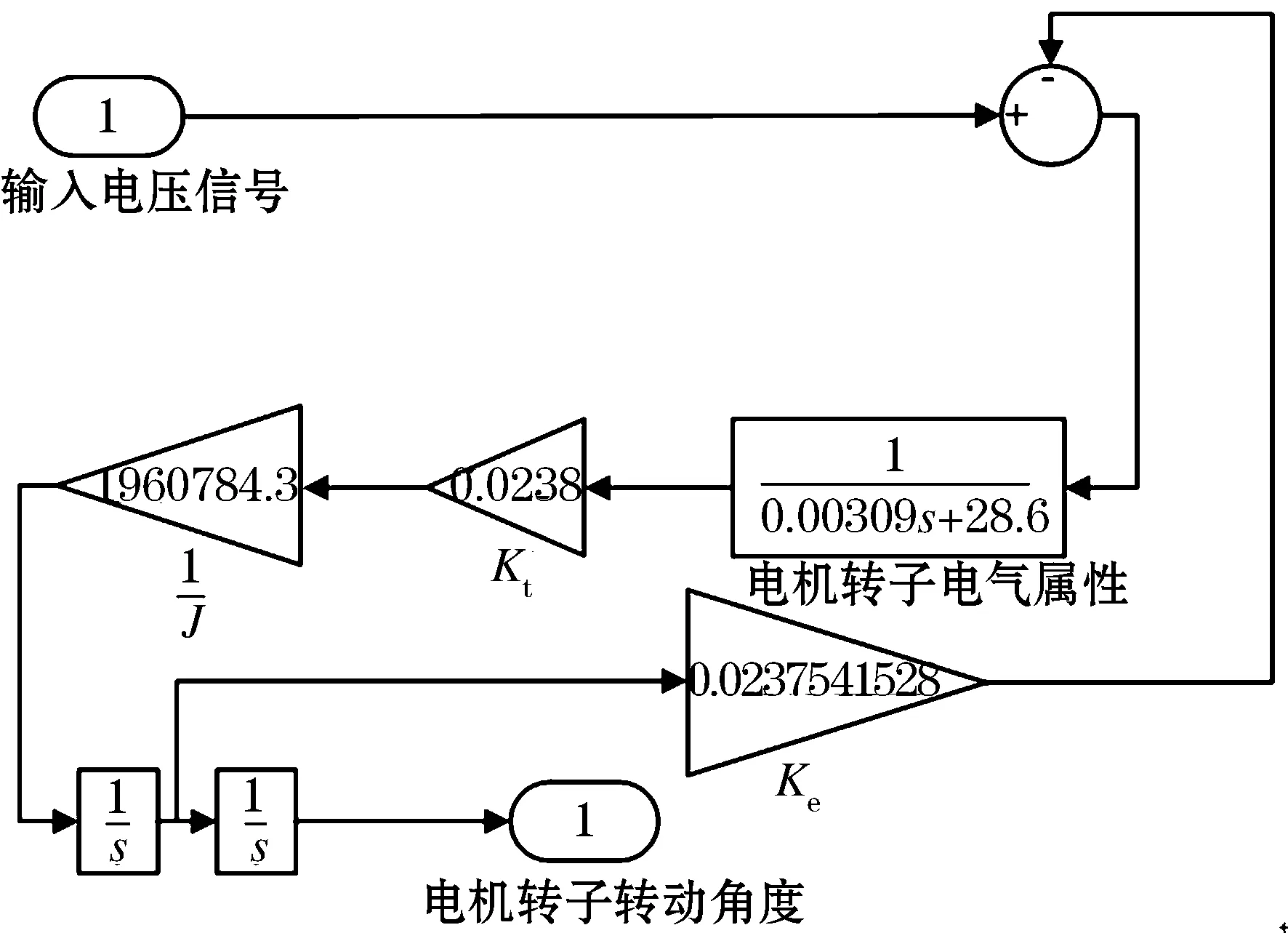
图4 直流伺服电机数学模型
2.2电枢电流控制
本文所采用的电机控制结构分为电流环和位置环双层控制结构.其中电流环采用PI控制律,其采样周期为100 μs,电流环的结构如图5所示.
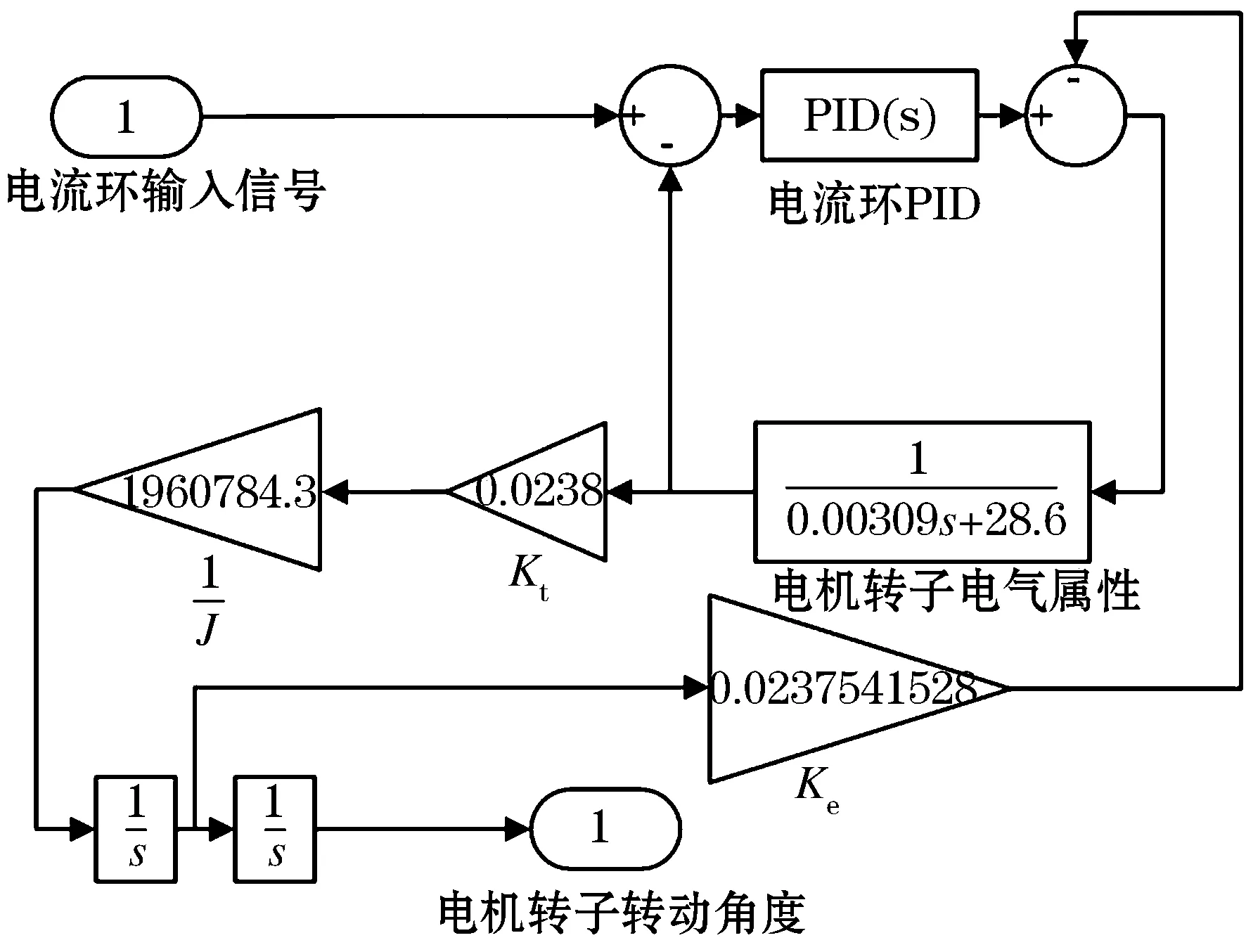
图5 直流伺服电机电流控制环
给电流环一个阶跃信号,在Matlab的Simulink中进行仿真,观察结果,调整PI参数,最终确定在Kp= 4.187 61,KI= 0.000 154 445时,电机电枢电流的阶跃响应迅速并且没有超调和振荡.图6为电枢电流的响应曲线,可以看出在0.2 s时,电枢电流就已经稳定,系统的响应较快,并且没有超调,没有振荡.
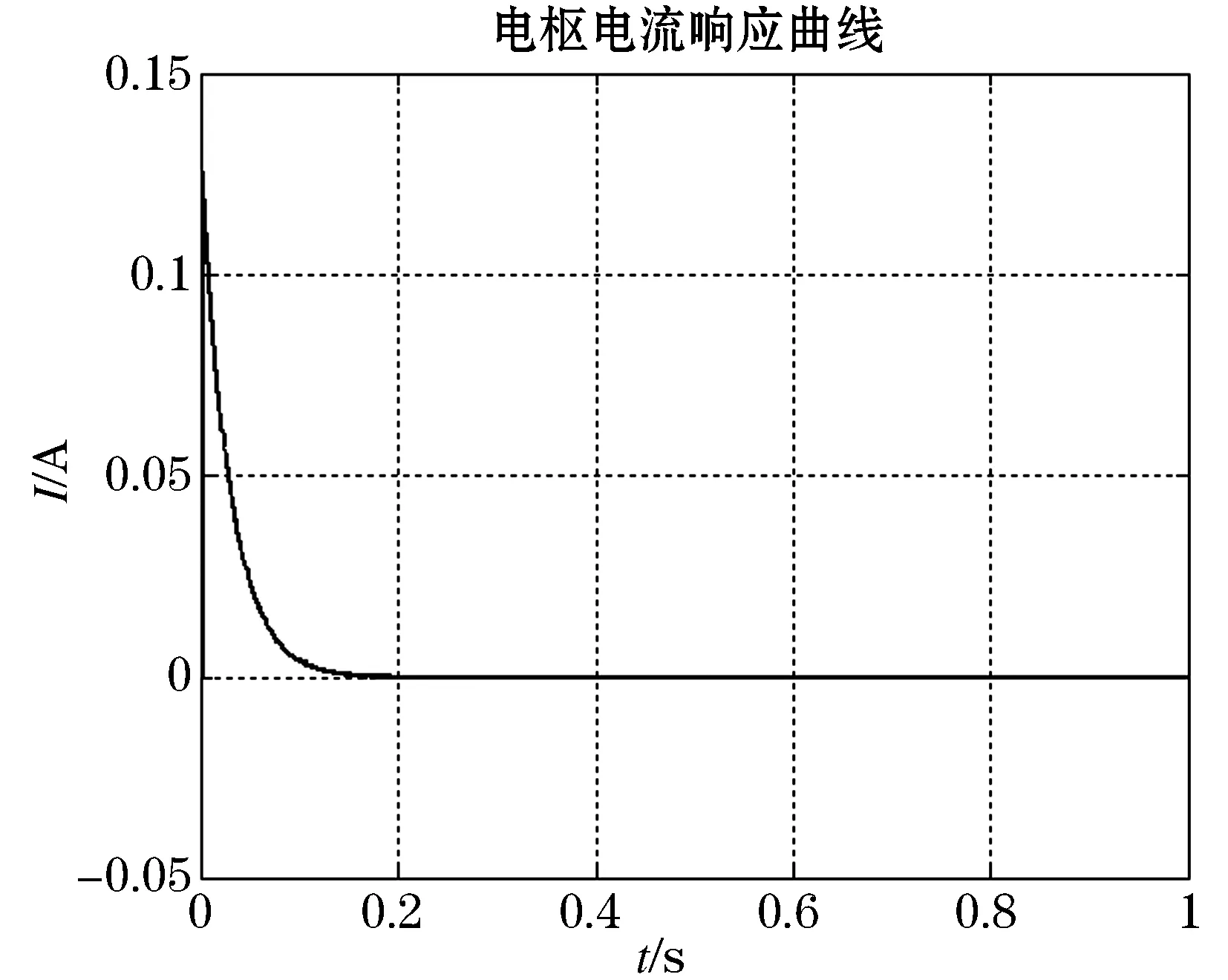
图6 直流伺服电机电枢电流阶跃响应曲线
2.3伺服电机角位置控制
在电流控制环的基础之上构造位置控制环,位置控制环采用PID控制律,采样周期为1 ms,位置环如图7所示.
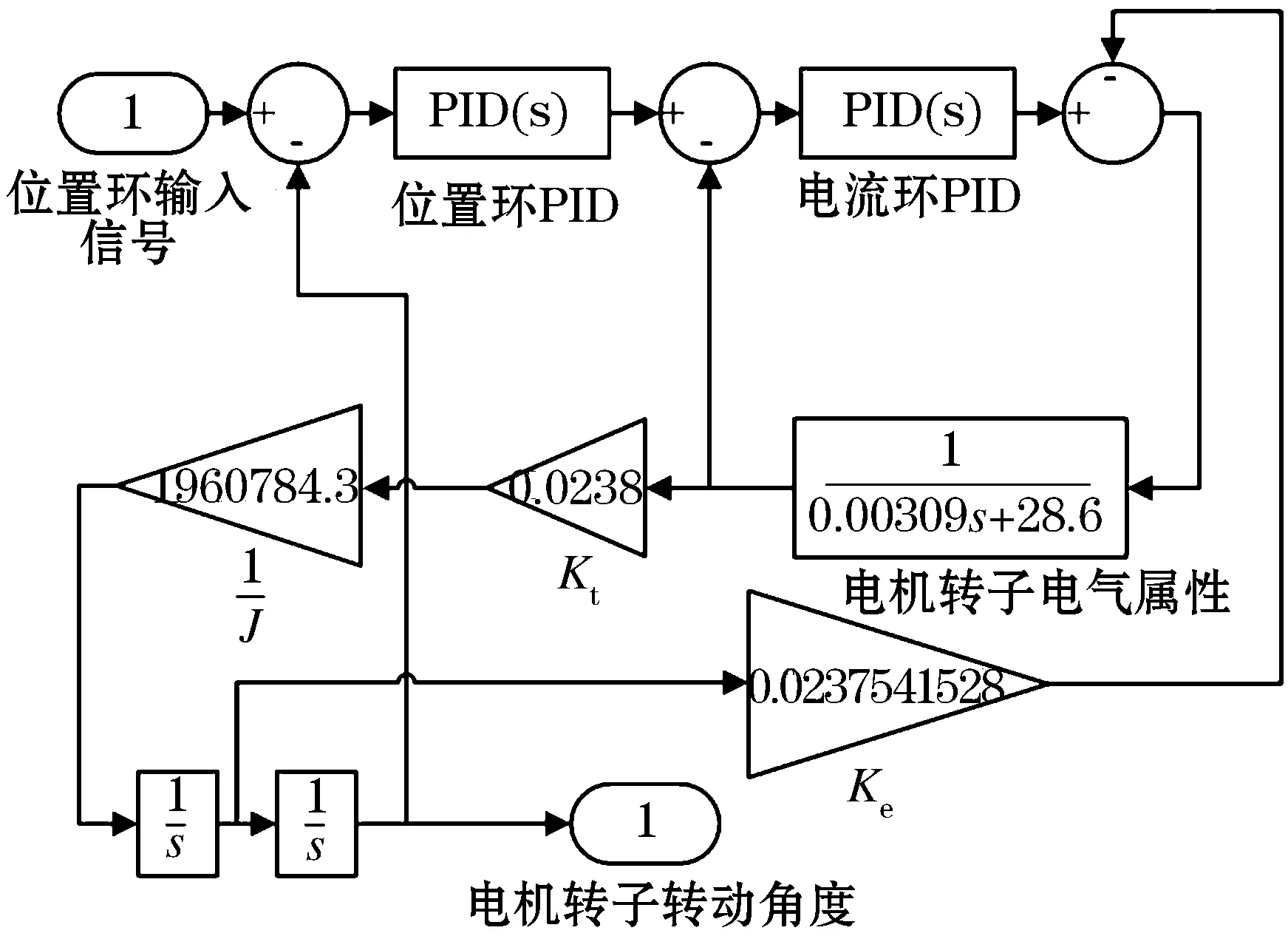
图7 直流伺服电机位置控制环
在Simulink仿真中调整PID参数,最后确定在Kp= 0.36,KI= 3.666,Kd= 0.011 2时,系统在阶跃输入信号的作用下,输出响应较快,并且超调震荡都还很小,位置环阶跃响应仿真结果如图8所示.
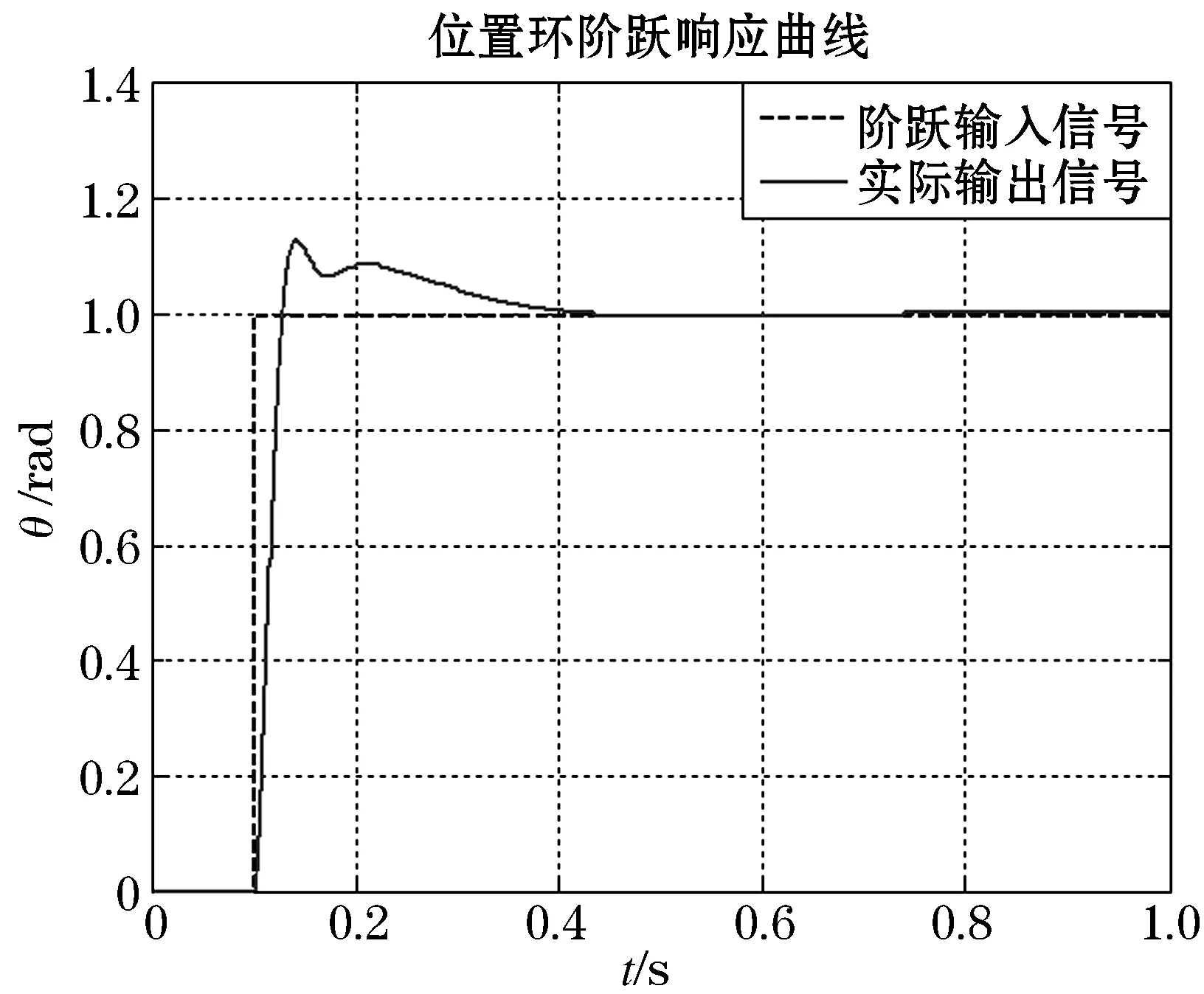
图8 位置控制环阶跃响应曲线
3轨迹规划
仿生六足机器人采用分层控制结构,每条腿是一个独立且完整的控制系统,接收来自顶层任务规划器的控制命令.由于单腿控制系统的控制周期远小于顶层任务规划器的控制周期,因此单腿控制系统要有轨迹规划与插值的功能.本文中采用三次多项式来实现轨迹规划功能.采用三次多项式的目的是不仅可以使两个采样周期之间的位置连续还可以使速度和加速度都连续,保证了运动的平稳性,如图9所示.
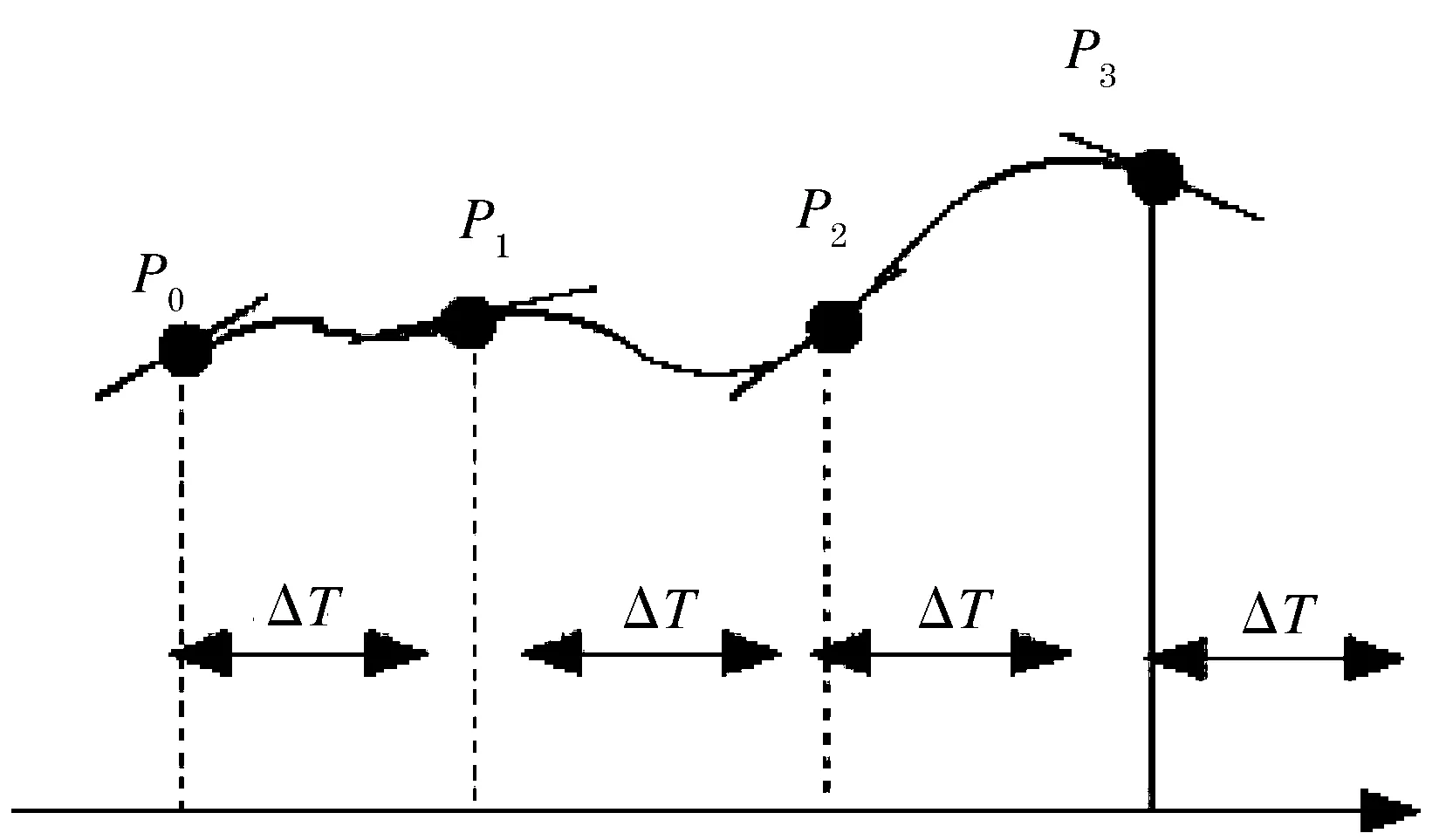
图9 三次多项式插值原理示意图
顶层规划器定时向单腿控制器发送要到达的新的位置P、速度V以及时间T的信息,即以(P,V,T)的模式发送新的命令.这些信息做为单腿控制器一个插值段的两个端点信息.单腿控制器的轨迹规划器根据这些信息插值其余时间点上的位置、速度.
插值参数a,b,c和d可以根据一个插值段的两个端点的位置、速度以及时间信息计算出来:
d=P[t0]=P[n-1]

位置、速度以及加速度的插值数据可以用下面的表达式计算出来:
P(t)=at3+bt2+ct+d
V(t)=3at2+2bt+c
(4)
A(t)=6at+2b
为验证上述结论,设插值周期为0.2 s,现有(0 rad,0 rad/s,0 s)、(0.1 rad,0.1 rad/s,0.2 s)以及(0.2 rad,0 rad/s,0.4 s)三个点为插值端点,用(3)式计算插值系数,在Matlab中,用式(4)画出位置P插值结果的图像,如图10所示.从图10中可以看出位置P和速度V在0.2 s处均连续,验证了结论的正确性.
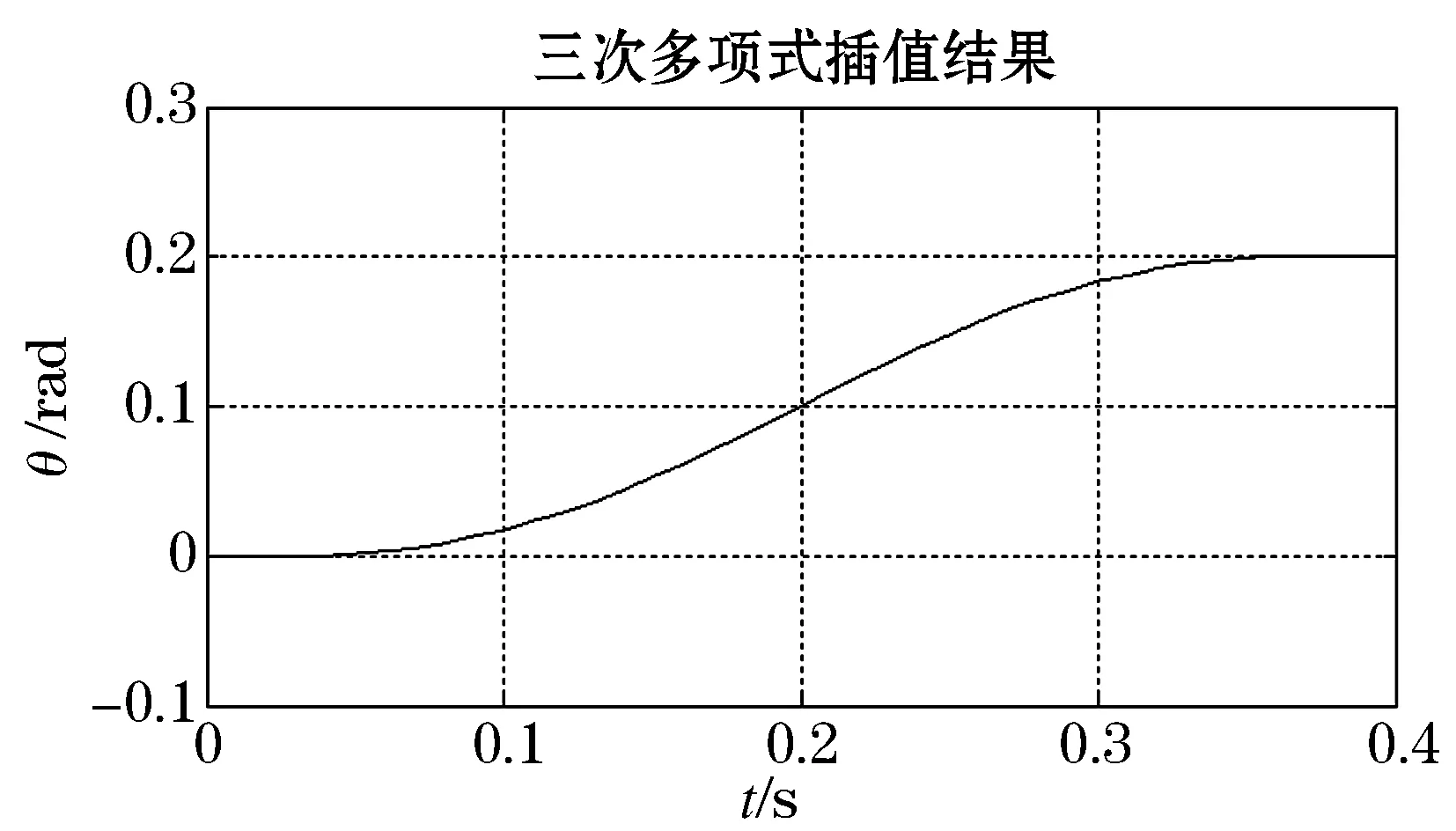
图10 轨迹规划仿真结果
4结语
本文从正逆运动学分析、电机控制以及轨迹规划三个方面分析了仿生六足机器人单腿控制系统.在Simulink中进行仿真,调整控制参数,使位置环系统的阶跃响应迅速并且超调振荡较小.仿真结果验证了算法的有效性,为之后进一步研究仿生六足机器人整体控制问题打下了基础.
参考文献:
[1]陈甫, 臧希喆, 闫继宏, 等. 适合航行的六足仿生机器人Spider的研制[J]. 吉林大学学报, 2011, 41(3): 765-770.
[2]刘海清, 刘玉斌, 张赫, 等. 仿生六足机器人基于足力分布的位姿调整策略[J]. 哈尔滨商业大学学报:自然科学版, 2012, 28(5): 541-545.
[3]VLADAREANU L, TONT G, ION I,etal. Walking robots dynamic control systems on an uneven terrain [J]. Advances in Electrical and Computer Engineering, 2010, 10(2): 145-152.
[4]DOUBLIEZ P F, BRUNEAU O, OUEZDOU F B. Force control of the redundant leg of a biped robot to produce large inertial effects for crossing obstacles [J]. International Journal of Humanoid Robotics, 2012, 9(01): 1250003-1250039.
[5]YEN J T, CHANG Y H. Rate-dependent control strategies stabilize limb forces during human locomotion [J]. Journal of the Royal Society Interface, 2010, 7(46): 801-810.
[6]BANALA S K, AGRAWAL S K, KIM S H,etal. Novel gait adaptation and neuromotor training results using an active leg exoskeleton [J]. IEEE/ASME Transactions on Mechatronics, 2010, 15(2): 216-225.
[7]BAZAZ S A, TONDU B. Minimum time online joint trajectory generator based on low order spline method of industrial manipulators [J]. Robotics and Autonomous Systems, 1999, 29(4): 257-268.
[8]TONDU B, ZORKANY H E. Identification of a trajectory generation model for the PUMA560 robot [J]. Journal of Robotic Systems, 1994, 11(2): 77-90.
Leg control system of hexapod robot
CAI Guo-feng, ZHANG He, CHEN Jie, LIU Yu-bin, ZHAO Jie
(State Key Laboratory of Robotics and System, Harbin Institute of Technology, Harbin 150080, China)
Abstract:In this paper, the kinematics of the leg of hexapod robot was analyzed and the relationship between foot end position and joint angles were calculated. Joint was driven by a DC servo motor which was controlled by current loop and position control loop. Current was controlled by PI and position was controlled by PID. The control parameters were adjusted in Simulink simulation until the position loop has rapidly step response, little overshoot and small oscillation. In order to ensure smooth movement, trajectory planning was achieved through cubic polynomial so that position, velocity and acceleration are continuous.
Key words:bionic robot; kinematics analysis; DC servo motor control, trajectory planning
收稿日期:2015-06-04.
基金项目:中央高校基本科研业务费专项资金资助(HIT.NSRIF.201644);国家自然科学基金资助项目(51105101)
作者简介:才国锋(1989 -),男,硕士,研究方向:机器人控制.
通讯作者:赵杰(1968 - ),男,博士,博士生导师,研究方向:机器人技术.
中图分类号:TP242
文献标识码:A
文章编号:1672-0946(2016)03-0267-04