基于滑模控制的三相SVPWM逆变器研究
2016-07-04李少龙李文龙
李少龙,赵 琴,李文龙,崔 悦,王 凡,梅 燕
(上海理工大学 光电信息与计算机工程学院,上海 200093)
基于滑模控制的三相SVPWM逆变器研究
李少龙,赵琴,李文龙,崔悦,王凡,梅燕
(上海理工大学 光电信息与计算机工程学院,上海 200093)
摘要针对现有的三相全桥逆变器输出电压存在的动态性能差、对负载变化敏感等问题,提出了一种基于滑模控制的输出电压控制方案。为使电路能够在不同的载波频率下运行,文中采用了电压空间矢量脉宽调制三相逆变器拓扑结构,仿真结果表明该方案使得输出电压具有较小的总谐波失真,并具有较好的稳态性能和负载适应能力。
关键词三相全桥逆变器;滑模控制;电压空间矢量脉宽调制
PWM技术就是对电路中开关元器件的导通和关断进行控制,使输出得到等幅不等宽的脉冲,并按给定算法对脉冲调节,从而改变输出电压的大小或频率[1]。而改进的PWM技术,通过采用空间矢量脉宽调制技术(SVPWM)来控制三相逆变器,且采用SVPWM调制的电路不仅能方便地数字化,还具有较高质量的动态性能,不仅功率因数高,在全控型器件控制的电路中还能实现电能的双向流动。本文在此基础上给出了三相逆变器基于d-q旋转坐标下PI闭环控制的控制模型和基于d-q旋转坐标下的滑模控制的控制模型。在滑模控制的研究中,采用文中所给出的趋近率,结合电路的状态方程,给出了滑模控制在逆变电路中的应用,并具体地讨论了该控制方法下电路的输出性能,通过对该控制模型仿真结果的分析证明其优越性。
1三相全桥SVPWM逆变器
SVPWM算法不仅能够用于电机控制中,还能用于控制逆变电路。该算法相对于传统的SPWM调制来说具有一定的优越性,虽然说SPWM的硬件电路更易于实现,但SVPWM能降低脉冲转矩,且对电压的利用率也高[2-3]。
在矢量控制的三相逆变电路中,通常需要进行一些坐标变换,将输出三相交流电流ia,ib,ic转换为d-q坐标系下的两相直流电流id和iq;将输出三相交流电压ua,ub,uc转变为d-q旋转坐标系下的两相直流电压ud和uq。其转化关系如下所示
(1)
(2)
三相逆变电路拓扑结构与其控制方法密不可分,常见的三相逆变器有两电平三相电压型逆变电路、三相四桥臂逆变器和三电平三相中点钳位(NPC)逆变器[4]。本文所采用的三相逆变器具体的电路图如图1所示,其中R的值为1 Ω,LA=LB=LC=3 mH,Ca=Cb=Cc=1 200 μF,Vd=600 V
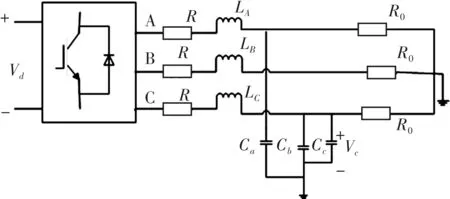
图1 三相逆变器拓扑结构
图1采用的三相逆变器是三相电压源型逆变器,在d-q坐标系下采用PI控制能够充分地发挥PI控制的优势[5-6],采用电压、电流双闭环控制对输出信号发生突变造成的扰动具有良好的抑制效果。通过在Matlab中搭建在d-q旋转坐标系下的电压电流PI控制仿真模型,可得到表1 PI控制下的仿真结果。从表1可看到,当保持其他参数不变的情况下,改变电路的载波频率,会得到不同的输出电压基波幅值和输出总谐波失真THD。当载波频率变化范围为10~50 kHz时输出电压的基波幅值均为正常的,都比较接近311 V,其总谐波失真也很小,且在载波频率f=50 kHz时,输出电压总谐波失真达到最小,但当载波频率达到60 kHz时,输出幅值存在较大的误差,且输出电压的总谐波失真也较之前有一定的增大。 所以,PI控制下的三相逆变电路,其输出虽有较高的稳态精度和较快的响应速度,但在载波频率变化范围较大的情况下并不适用,为使载波频率变化范围较大且电路输出较稳定,本文研究滑模控制在三相逆变电路中的应用。
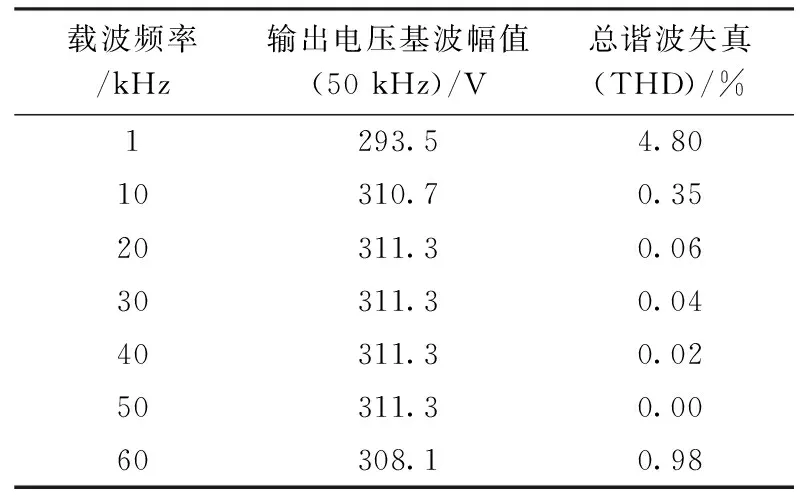
表1 PI控制下仿真结果
2滑模控制器的设计
虽在d-q旋转坐标下,PI控制的三相逆变器输出不仅能够快速地达到稳定状态,而且具有较小的总谐波失真,也有较高的稳态精度。但在电路载波频率变化较大的时候并不能始终使电路有稳定的输出,为使电路能够更好地在不同载波频率下运行,本文在三相逆变器电路中设计一种新型的滑模控制器才控制电路的稳定输出。在进行滑模设计时,需要选择合适的滑模面。由图1可以得到三相逆变主电路的状态方程表达式如下
(3)
其中,iL为电感电流;VC为电容两端电压;Vd为输入电压,其中Uo为R0两端电压,将上述等式写为d-q轴上的表达式如下
(4)
选取电感电流和输出电压为状态变量,即有x1=U0;x2=iL,此时,可得到滑模控制器中S函数如下
S=α1x1+α2x2
(5)
(6)

dd=
(7)
同理可得
dq=
(8)
由上述等式(5)、式(6)和式(7)可得到如下三相逆变电路的控制框图。
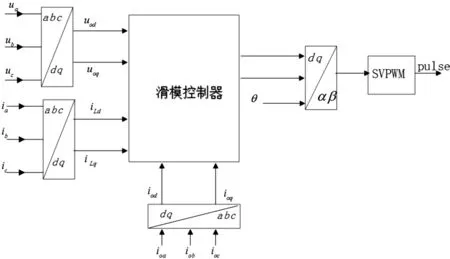
图2 三相逆变器滑模控制下的总框图
在图2中,在该控制器中,反馈信号为ua,ub,uc,ia,ib,ic以及ioa,iob,ioc,经过坐标转换,得到d-q坐标轴上的电信号,再经过滑模控制器,其输出信号再经过坐标转换以及SVPWM调制,得到6路PWM脉冲,用来控制逆变器。图3为滑模控制器具体框图,其中dd和dq为控制器输出信号,这两个信号经过坐标变换后的输出信号通过SVPWM调节,得到PWM脉冲。
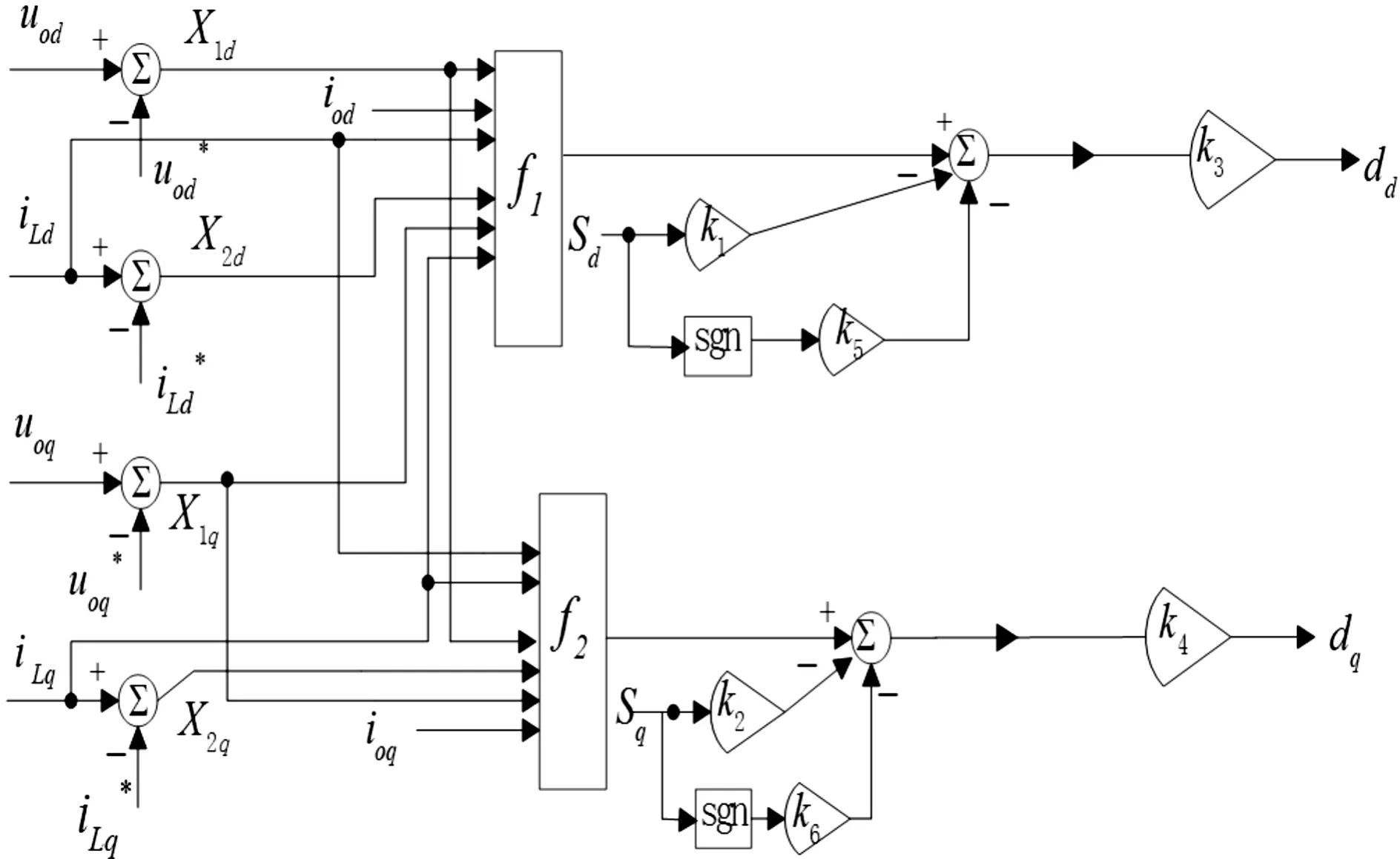
图3 滑模控制器框图
图3中函数f1和f2的表达式分别为
(9)
(10)
在上述控制算法下,给出电路中各参数如下,LA=LB=LC=3 mH,CA=CB=CC=1 200 μF,R0=20 Ω,α1=α2=1,ε=6×105,开关频率f=20 kHz当 值不相同时,其中输出电压幅值的参考值为311 V,通过仿真可给出表2所示的仿真结果。

表2 滑模控制下仿真结果
表2是电路运行在稳定状态时在同一时刻取到的值,由表2可看到,当k1,k2的取值微小时,输出电压的谐波失真比较小,且在k1=-60 000时,谐波失真达到最小,此后再减小则始终保持不变,但输出电压在50 kHz时,基波幅值在k1=-120 000时能达到理论值311 V,由仿真结果可看到,此控制器控制的逆变器输出电压较稳定。解决了PI控制的三相逆变器输出所遇到的存在稳态误差和输出不太稳定等问题。
3系统仿真与分析
以如图1的三相逆变拓扑结构为基础,在Matlab中搭建仿真模型时,负载是永磁同步电机,在PI控制器和滑模控制器作用下分别对永磁同步电机进行控制,首先让速度控制器采用PI控制,其中转速参考值n*的值为600,isd和isq为同步电机定子电流,在PI控制中,P1的参数为Kp=18,Ki=10,而P2设置的参数为Kp=18,Ki=10,P3的参数为Kp=0.06,Ki=1,通过仿真可得到图4所示的同步电机转速转矩曲线。
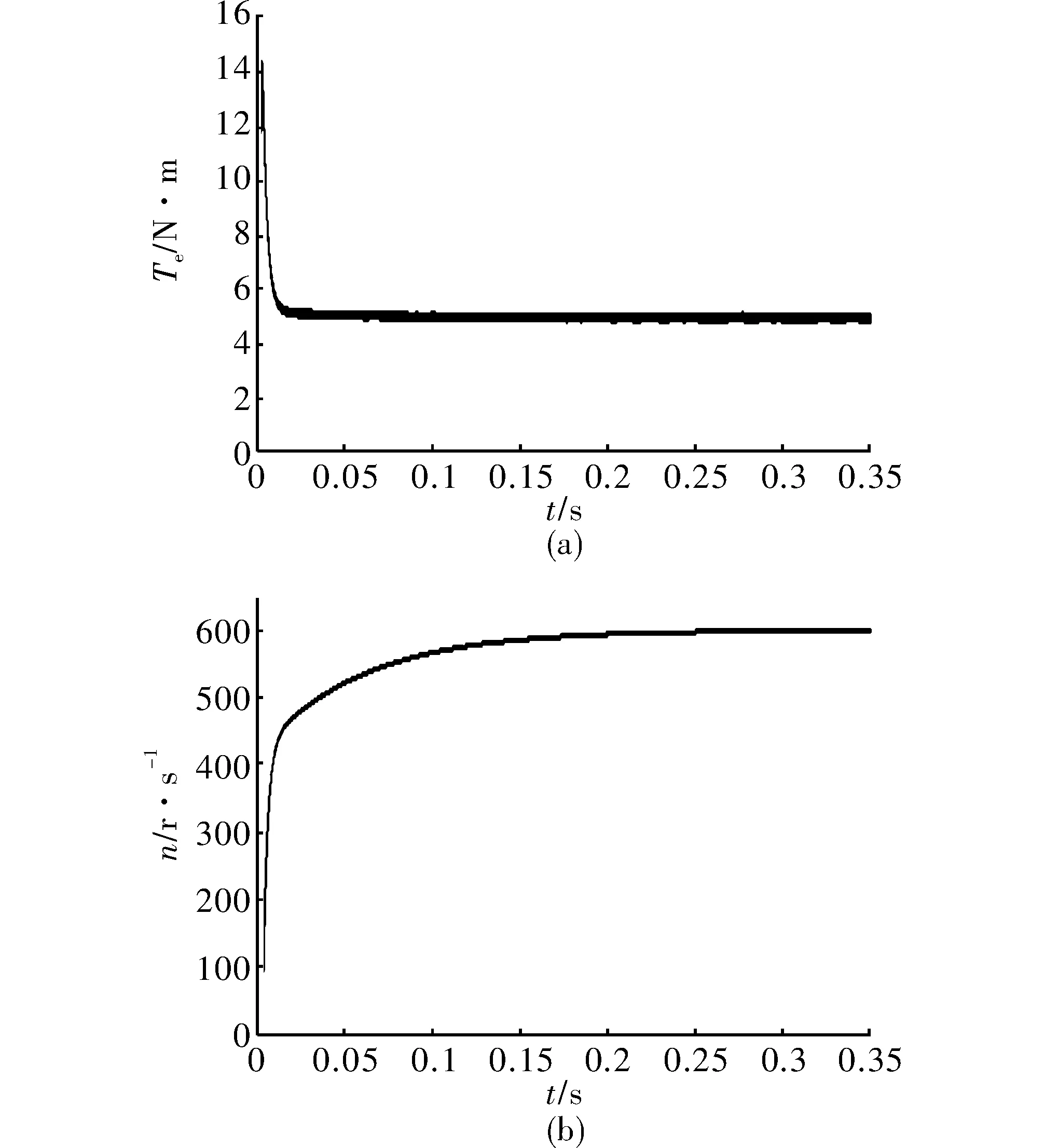
图4 PI控制下同步电机转速转矩曲线
然后让速度控制器采用滑模控制器,得到的同步电机控制结构框图如图5所示,通过仿真可得到图6所示的同步电机转速转矩曲线。
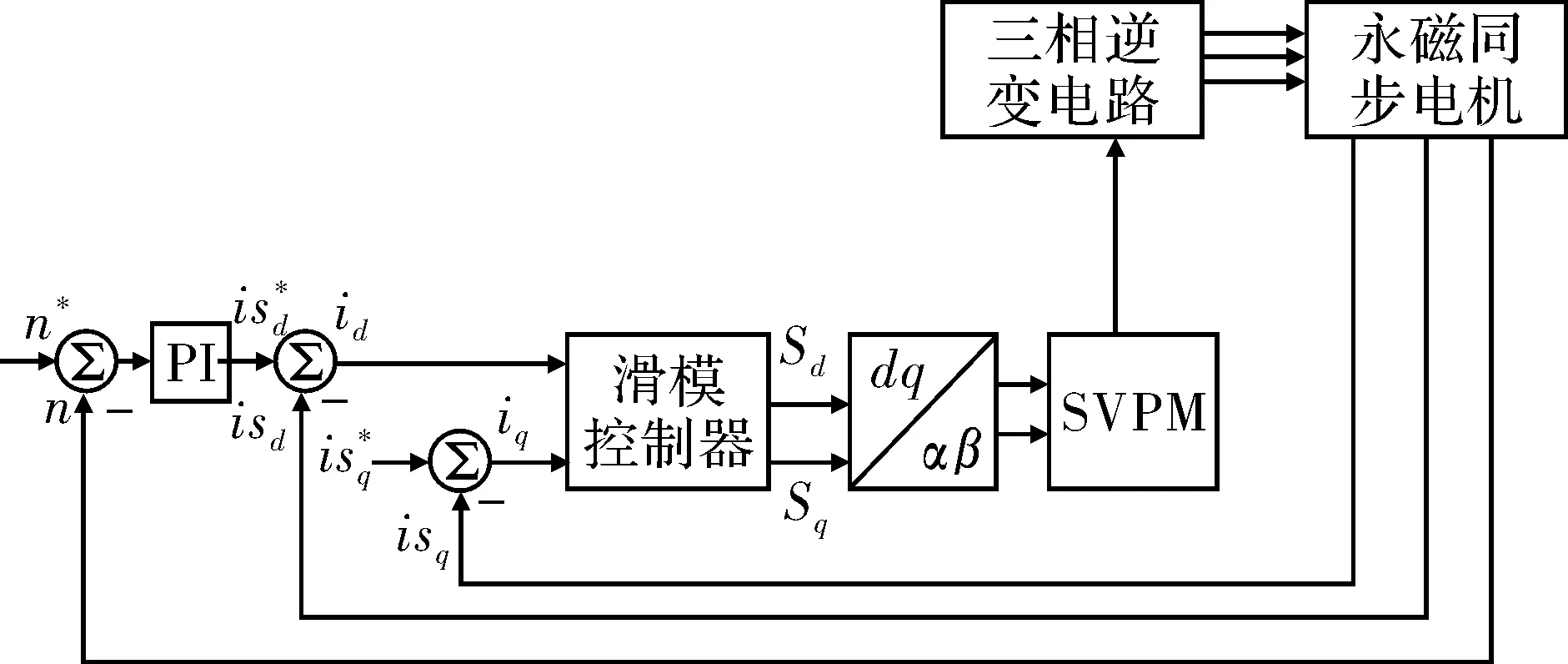
图5 基于滑模控制的同步电机控制框图
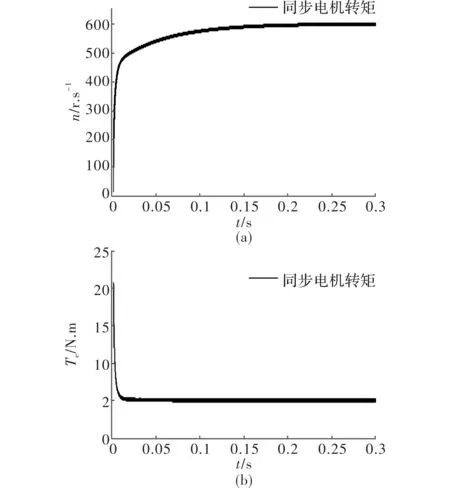
图6 滑模控制下同步电机转速转矩曲线
从上图4和图6可看到,当转矩为5 N·m时,采用文中设计的滑模控制的电机,与之前采用PI控制器控制的电机相比,其转矩到达稳定时所需的时间明显减小,且同步电机也能快速达到稳定转速600,从同步电机定子电流曲线图7,可看出整个系统在所设计的滑模控制器的作用下具有良好的抗抖动特性,其输出稳态误差较小,且在三相交流输出中,具有较小的总谐波失真指数。

图7 同步电机定子电流曲线
4结束语
本文采用SVPWM调制的三相逆变电路不仅能便于数字化,还具有高质量的动态性能,不仅功率因数高,在全控型器件控制的电路中还能实现电能的双向流动。之后在此基础上又设计了三相逆变器基于d-q旋转坐标下PI闭环控制的控制模型和基于d-q旋转坐标下的滑模控制的控制模型。通过Matlab仿真可看到,虽PI控制下的逆变电路的输出具有响应快、谐波分量小和基波幅值误差小等优点,但在载波频率变化较大时,PI控制下的电路输出便会受到较大的影响。而本文引进的一种新型滑模控制器,不仅解决了电路基波幅值难以达到理想值的缺点,同时也解决了PI控制下的电路输出在载波频率变化较大时输出不稳定的问题。最后通过对整个系统仿真可看到,在所设计的滑模控制作用下,同步电机能快速地达到稳定的转矩和转速,且电路的三相交流输出中,具有较小的总谐波失真指数,其输出响应快,且稳态误差也较小,具有较好的稳态性能和较强的负载适应能力。
参考文献
[1]肖春燕.电压空间矢量脉宽调制技术的研究及其实现[D].南昌:南昌大学,2005.
[2]韩啸一.基于空间电压矢量控制的三相电压型PWM整流器的研究[D].北京:北京交通大学,2011.
[3]王永,沈颂华,吕宏丽,等.基于简单电压空间矢量三相逆变器的研究[J].电工技术学报,2005,20(10):25-29.
[4]屈百达,潘文英.三相逆变器的建模及其控制[J].电源技术,2014,38(2):345-348.
[5]吴小华,邹仁炜,叶建峰.基于数字PI控制的三相逆变电源的仿真研究[J].计算机仿真,2006,23(10):239-243.
[6]谢斐.空间矢量算法的研究及其在三相UPS数字控制系统的实现[D].广州:华南理工大学,2012.
[7]Tan S C, Lai Y M,Tse C K. General design issues of sliding-mode controllers in DC-DC converters[J].IEEE Transactions on Industrial Electronics,2008,55(3):1160-1174.
[8]Lei J,Su S,Liu G Y,et al.The sliding mode control method of grid-connected inverter applied to three-phase intermittent power supply[C].Beijing: Proceedings of the 29th Chinese Control Conference,2010.
[9]李少华.电压空间矢量变频调速技术的研究及实现[D].无锡:江南大学,2008.
Study on Sliding Mode Control in Three-phase SVPWM Inverter
LI Shaolong,ZHAO Qin,LI Wenlong,CUI Yue,WANG Fan,MEI Yan
(School of Optical-Electrical and Computer Engineering, University of Shanghai for Science and Technology,Shanghai 200093, China)
AbstractIn terms of the poor dynamic performance and sensitivity to load change in the output voltage of three-phase full bridge inverter, a output voltage control scheme based on sliding mode control is proposed. In order to make the circuit operate at different carrier frequencies, taking advantage of the three phase inverter topology structure of voltage space vector pulse width modulation (SVPWM), the simulation shows that the scheme makes the output voltage has a smaller total harmonic distortion, good steady performance and strong load adaptability.
Keywordsthree-phase full bridge inverter; sliding mode control; SVPWM
收稿日期:2015-10-28
作者简介:李少龙(1972-),男,硕士,讲师。研究方向:电力电子非线性及控制。赵 琴(1991-),女,硕士研究生。研究方向:电力电子非线性及控制。
doi:10.16180/j.cnki.issn1007-7820.2016.06.036
中图分类号TM 464+.32
文献标识码A
文章编号1007-7820(2016)06-124-04
