激光照射器立靶测试中靶板识别方法
2016-06-07张茂桢景文博刘学王晓曼毛须伟李媛媛
张茂桢,景文博,刘学,王晓曼,毛须伟,李媛媛
(1.长春理工大学 电子信息工程学院,长春 130022;2.长春理工大学 光电工程学院,长春 130022)
激光照射器立靶测试中靶板识别方法
张茂桢1,景文博2,刘学1,王晓曼1,毛须伟1,李媛媛1
(1.长春理工大学电子信息工程学院,长春130022;2.长春理工大学光电工程学院,长春130022)
摘要:在激光照射器立靶测试系统中,针对外场环境背景复杂、对比度低等情况,导致动态靶板难以精确识别,提出一种基于小波变换的多尺度模板匹配识别动态靶板方法,采用小波变换和多尺度理论相结合的多层次搜索匹配策略,首先在图像分辨率最低层次进行粗匹配,剔除大量非匹配点,保留对应准匹配点;然后沿图像分辨率增大方向在准匹配点进行逐层局部匹配,直到匹配结束,精确识别出靶板的四个角特征目标区域,精确定位靶板角特征目标点。实验表明,该方法对动态靶板中心的测量精度达到0.4pixel,对激光照射器照射精度测试的研究有重要意义。
关键词:激光照射器;靶板识别;模板匹配;小波变换
激光半主动制导武器在现代高技术战争中的地位和作用愈发受到人们的重视,是我国科技国防战略的重点[1]。激光半主动制导武器主要由激光制导导弹和激光照射器组成,激光照射器照射被攻击目标,制导导弹依据照射光斑识别并打击目标。激光照射器命中率精度是评估激光照射器性能的重要指标,命中率精度严重影响制导导弹的制导精度[2]。随着武器装备的不断升级,对激光照射器命中率精度测量的快速性和准确性要求也越来越高。
目前,对激光照射器立靶测试中的靶板识别常用的方法有:使用中心位置贴有黑十字的靶板,然后利用模板匹配方法识别靶板中心[3,4];姚志军[1]等人通过提取出靶板边缘信息和特征点,实现动态的靶板检测;张宁[5]等人利用安装LED光源的靶板,通过识别LED光源特征点来定位出靶板中心。这些方法虽然可以识别出靶板,但是,利用贴有黑十字的靶板时,激光光斑照射到靶板的黑十字上,会增加靶板中心的识别难度,提高算法复杂度,降低了识别的实时性;对靶板全部直线边缘特征提取易受到复杂背景物体的影响;在特征点安装LED光源会影响激光照射光斑的提取,从而影响激光照射精度的精确测量。
针对上述这些问题,为了精确识别测试系统中的动态靶板,提出基于小波变换的多尺度模板匹配的动态靶板识别方法,该方法无需标记靶板中心,只需要提取出规则靶板的四个角特征点,实现靶板中心精确识别,无需检测出靶板所有边缘的信息,降低了背景信息对靶板识别的影响,采用多尺度和小波变换的方法不仅克服了噪声对提取靶板特征点的影响,同时提高了模板匹配的速度。该方法具有实验条件要求低、处理速度快、识别精度高等优点。
1 激光照射器立靶测试系统工作原理
激光照射器立靶测试系统主要由机载激光照射器、可见光相机、靶板、直线轨道、跟踪转台和计算机等组成,如图1所示。激光照射器对移动的靶板发射激光,可见光相机在距直线导轨的1km处的转台上,靶板以一定的速度沿着直线轨道移动,转台在计算机跟踪系统的控制下自动跟踪靶板,可见光相机随转台的转动而转动,实现对靶板图像的连续采集并保存。夜间测量时,在靶板的四周安装四个信标灯为跟踪系统提供跟踪对象。事后分别处理白天与夜间的靶板图像,识别图像上的靶板中心,进而实现激光照射器命中率的测量。
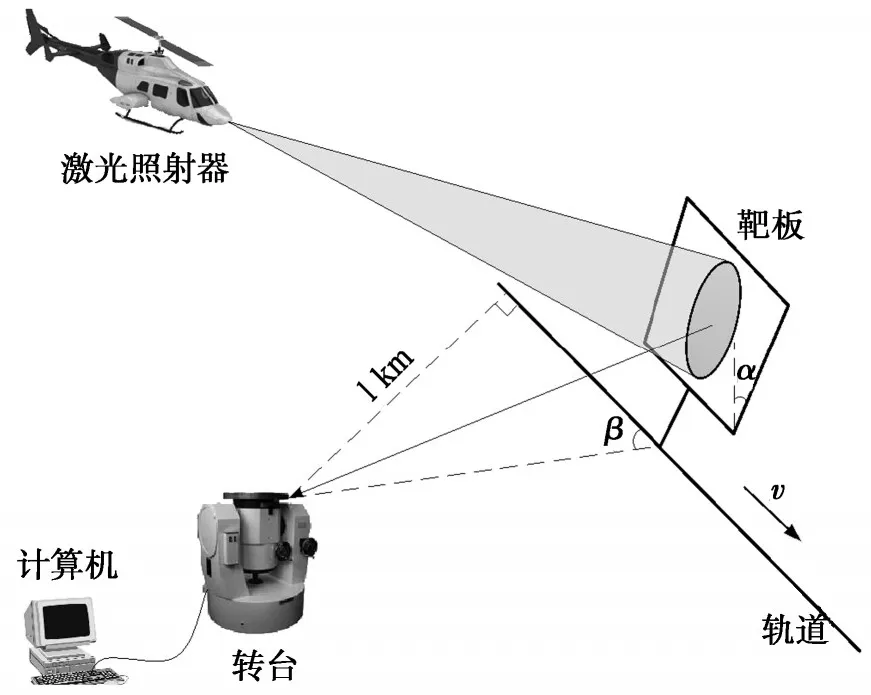
图1 激光照射性能测量系统示意图
2 激光照射性能动态靶板
在激光照射器立靶系统中,靶板是非常重要的因素,为了便于靶板中心位置的测量,采用形状规则的长方形靶板,大小为6m×5m,并在平整靶面上喷涂特殊材料,用于保证目标漫反射系统满足激光照射器立靶测试瞄准跟踪要求。对于夜间的测量情况在靶板的四周安装四个信标灯用于夜间测量的识别特征点。由于靶面涂有特殊的漫反射材料,白天测量时,目标靶与背景区别比较明显,容易识别靶板的角点;对于夜间情况,利用识别靶板四个信标灯区域来作为靶板的角点。针对激光照射性能测量系统的靶板的特点,提出一种基于小波变换的多尺度模板匹配动态靶板识别方法。
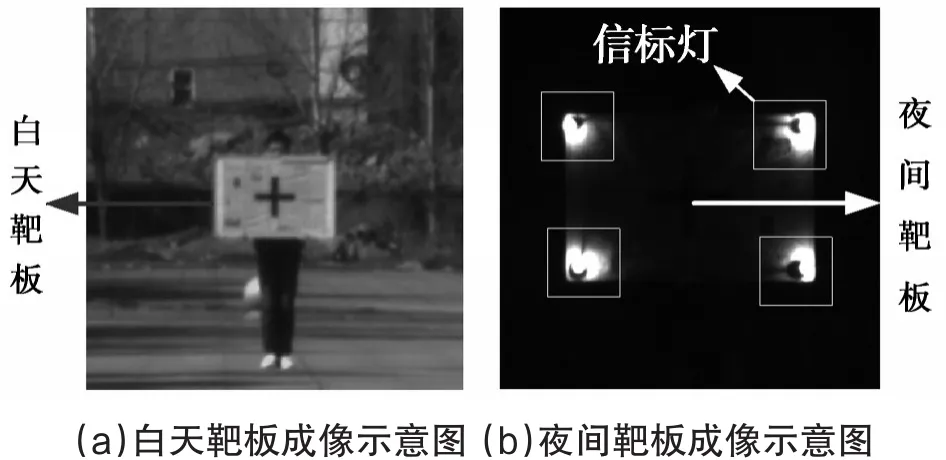
图2 目标靶成像示意图
3 激光照射测试靶板中心识别原理
3.1靶板中心识别算法流程
算法流程图如图3所示,尽管使用识别靶板的方法相同,针对待检测夜间靶板和白天靶板的图像,算法设计了两条分支,以便更好的适应算法的识别能力。首先分别选择夜间和白天的标准靶板图像,在对应标准的靶板图像上分别采集好白天靶板角特征目标点模板和夜间信标灯特征目标模板。算法的转移条件设计为:首先计算读入图像的平均灰度值,当平均值低于一定的阈值时,则为夜间靶板图像,将匹配的模板选择为夜间的靶板特征目标模板。
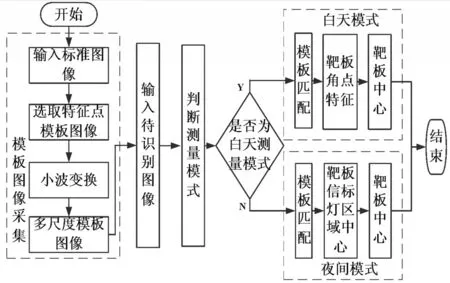
图3 靶板中心识别方法基本原理图
3.2小波变换的多尺度模板匹配
基于小波变换的多尺度的模板匹配方法,主要利用了小波多尺度的特性对待匹配图像和目标模板图像进行小波分解,组成图像金字塔[5],结构图如图4所示。首先在图像分辨率最低的层次分进行模板匹配,剔除了大量的非匹配点,降低了复杂背景和噪声对目标的影响,然后在此匹配结果的基础上对图像分辨率较高的层次进行局部模板匹配,直到匹配结束。
该方法首先在低分辨率层次获得n个可能位置之后,再在较高分辨率层进行精选,排除部分伪目标,直到最高分辨率层,以获得目标的精确位置,通过该方法可提高模板匹配速度,从而减少运算时间,同时也降低噪声对目标的影响。
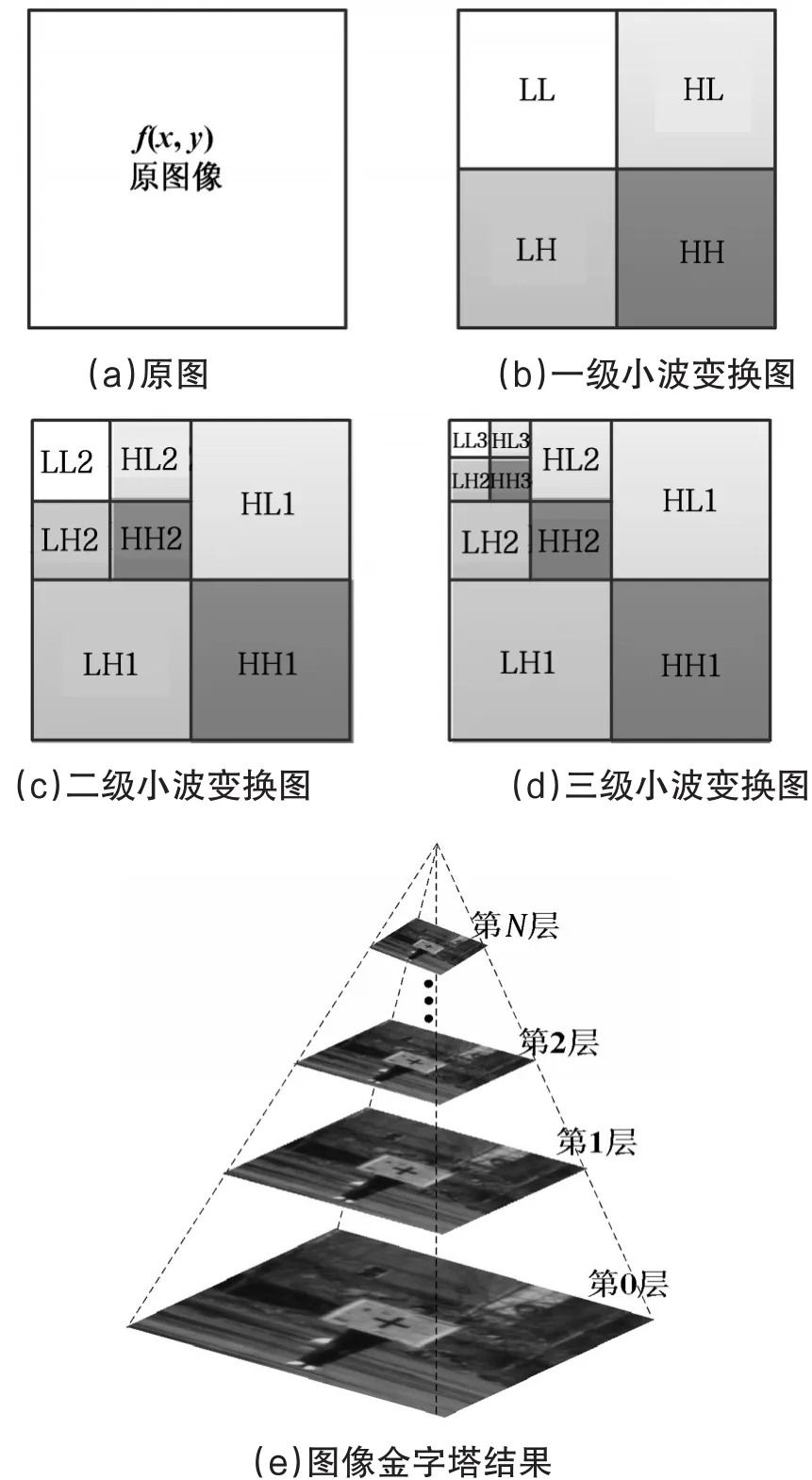
图4 图像小波变换示意图及图像金字塔结构
采用的模板匹配的算法为归一化互相关法(Normal Cross Correlation,简称NCC)。图5为基于小波变换模板匹配示意图。
假设模板图像T(s,t)的尺寸为M×N,其中M、N往往取奇数,待匹配图像f(x,y)的大小为W×H(1≤M≤W,1≤N≤H),则:
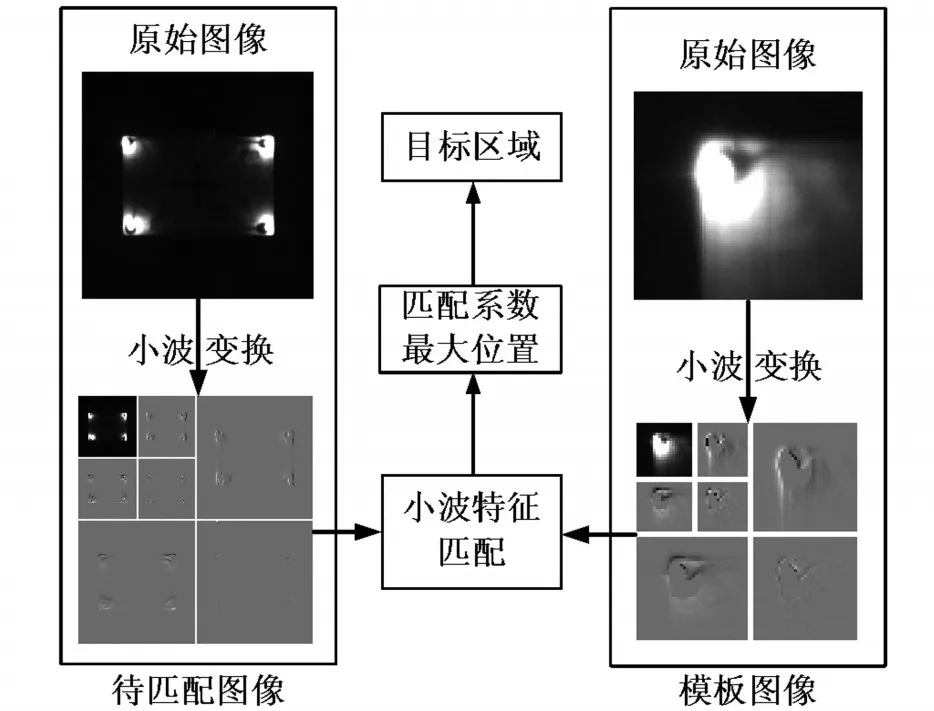
图5 小波变换目标模板匹配示意图
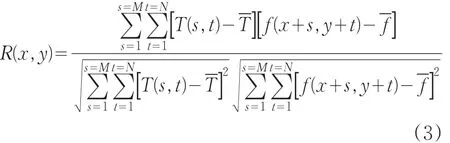
当R(x,y)达到最大时,两图匹配成功。获得靶板的四个角点区域,为了得到靶板角点坐标,利用公式(4)计算靶板角点的坐标。对匹配的目标区域计算质心,得到靶板的角点坐标,质心计算公式为:
3.3靶板中心计算
目标靶板在可见光相机成像后,利用基于小波变换的模板匹配的方法获得目标靶图像四个角点的坐标值,并通过计算即可得到目标靶中心的位置。如图6所示,图像上的T1、T2、T3、T4分别为目标图像上的四个目标靶的四个角点坐标,在图像坐标系下,按照式(5)计算靶板中心T0坐标:
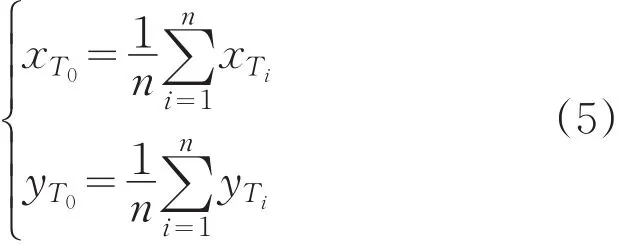
式中,xT0,yT0表示靶板中心的横、纵坐标,xTi,yTi表示靶板角的横、纵坐标,n为靶板角点个数。
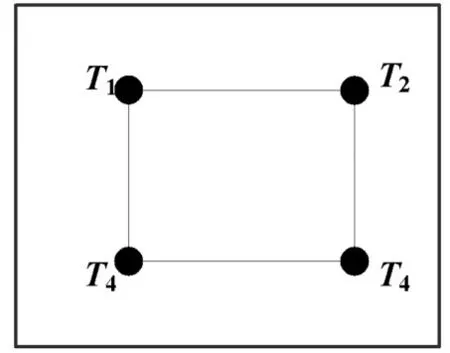
图6 靶板四个角点分布示意图
4 实验结果及分析
采用Lumenera LM135M型相机为成像设备,像元尺寸为4.65μm×4.65μm,焦距为100mm,图像分辨率为1392×1040。计算机配置:CPU型号Intel Core i7,3.4GHz,内存8G。本文的算法采用Microsoft Visual Studio 8.0进行了大量的仿真实验。模拟激光照射性能监测系统实际测量环境试验:靶板移动,相机距轨道的垂直距离为100m,固定相机位置不变,随靶板移动转动相机跟踪靶板,每次实验连续采集100帧图像。为了验证该方法靶板与相机在不同间距下的有效性,对相机距轨道的垂直距离分别在100m、300m、500m、800m的情况下进行了验证。
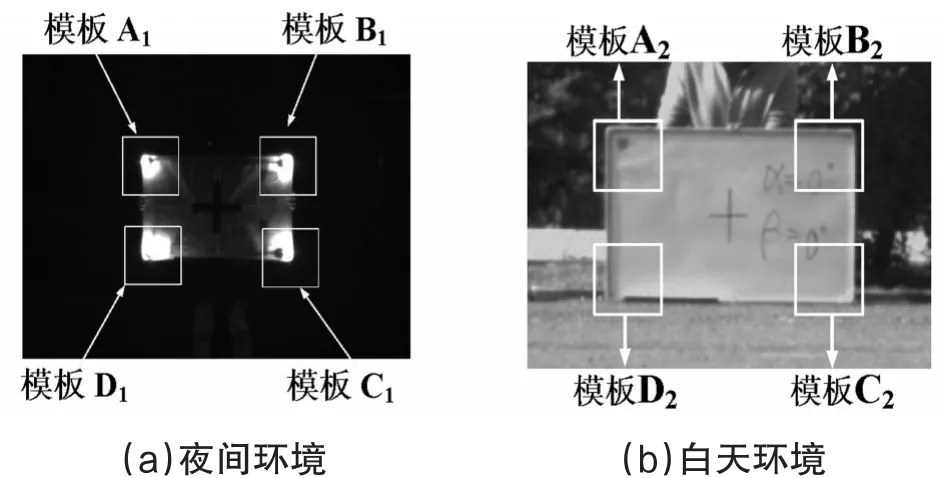
图7 标准图像及其四个角点模板图像
对白天测量环境,任意选择一帧图像作为标准图像,制作四个靶板角点模板;对夜间测量环境,任意选择一帧图像作为标准图像,选择信标灯区域制作四个角点模板图像,模板图像如图7所示。
本文对图像和目标都使用三层Harri小波变换,其效果图如图8所示,构造成四层图像和模板的金字塔。模板大小为61×61,首先从金字塔顶端,即分辨率最低的图像开始匹配,然后计算出下一层的匹配区域,逐渐往分辨率较高的层数进行匹配,最后输出模板准确的靶板四个角点。图8为夜间测量第30帧图像的小波变换,图9为金字塔图像,上面两层是识别结果图,图10(a)为靶板四个角识别结果,“十字”标记出靶板信标灯区域质心位置,矩形框位置表示匹配区域,图10(b)列出了夜间测试时金字塔底层靶板搜索区域匹配系数的3D示意图,其中峰值表示金字塔底层匹配系数最高的点。
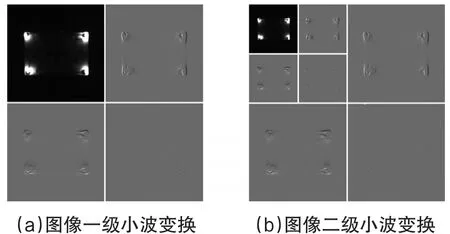
图8 小波变换效果图
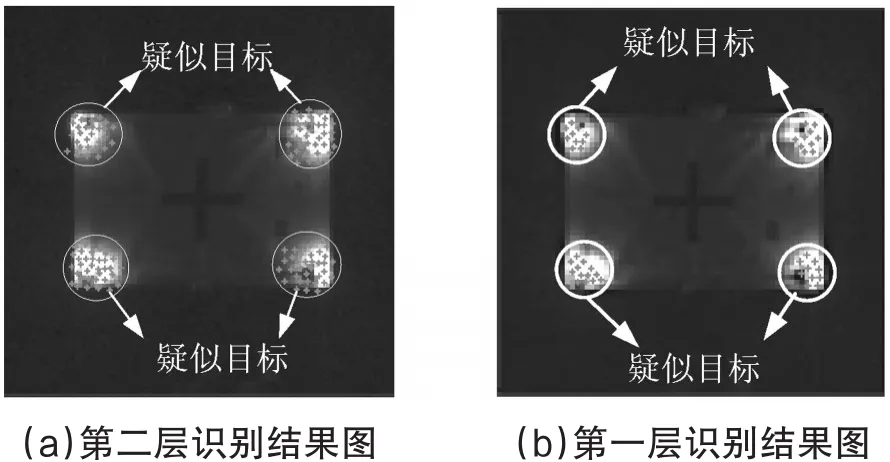
图9 图像金字塔低分辨率层次识别结果
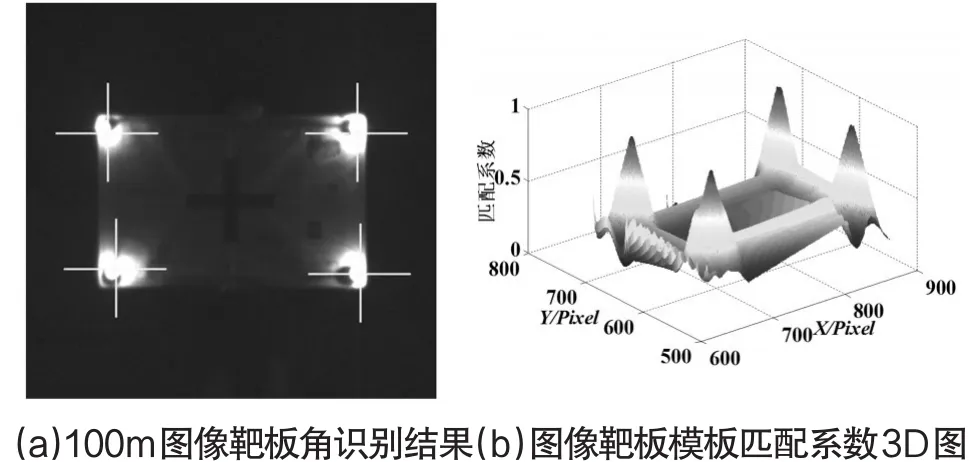
图10 夜间测量,间距为100m时第30帧图像靶板角点识别结果
根据由上述方法得到靶板的四个角点坐标,利用公式(4)分别定位出白天和夜间靶板的中心坐标,表2列出了某次测量时51-65帧图像靶板中心。
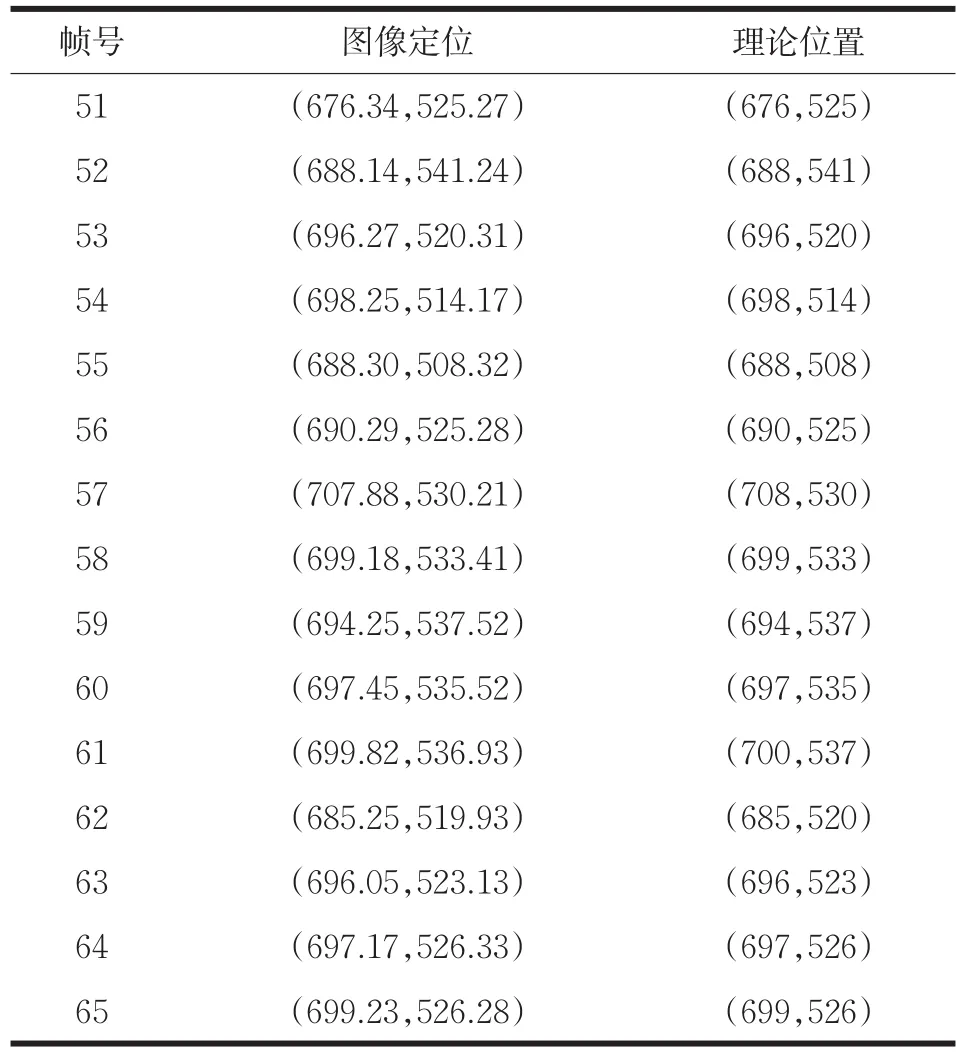
表1 相机距离轨100m时51-65帧图像定位靶板中心
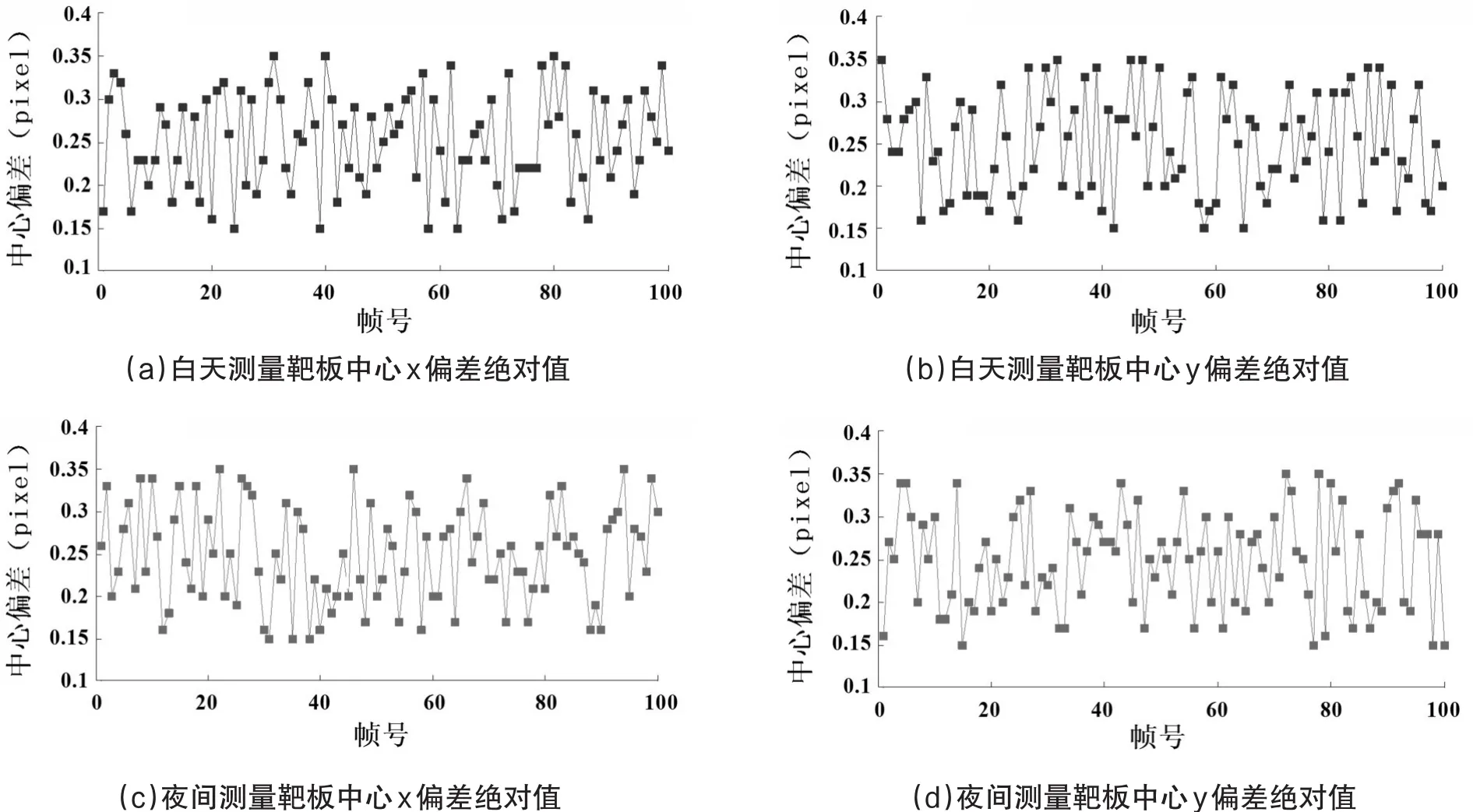
图11 相机与靶轨道相聚100m时,测量靶板中心靶板中心点与实际中心点坐标偏差曲线

图12 相机与靶轨道相聚500m时,白天测量靶板中心点与靶板中心点与实际中心点坐标偏差曲线
为了验证靶板中心点识别的准确性,将本文方法识别出的靶板中心点x,y的坐标与实际中心点的坐标进行比较。图11分别是白天与夜间靶板中心在x,y方向上与实际的偏差曲线。为了获得标准靶板图像的中心坐标,采用公式(4)计算出靶板图像中靶板中心的十字坐标来作为理论坐标。
通过多次试验,对试验数据进行处理,根据误差理论,靶板识别的精度计算公式如下:
其中,σ为测量精度,Δi的第i帧靶板中心偏差,的n次测量偏差均值,n是测量图像总帧数,(Lix,Liy)是第i帧图像的定位的靶板中心坐标。第i帧图像的靶板中心理论位置,对所有测试数据联合式(6)、(7)、(8)进行计算,得到结果为0.396,靶板的定位中心精度达到0.4pixel。因此,本文的方法满足靶板中心定位精度,且稳定性好。
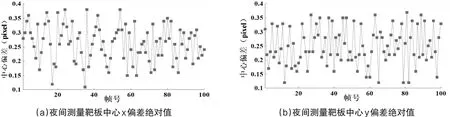
图13 相机与靶轨道相聚800m时,夜间测量靶板中心点与实际中心点坐标偏差曲线
5 结论
文中提出了一种基于小波变换多尺度模板匹配动态靶板识别方法。利用小波变换多尺度模板匹配有效解决了变化背景对模板匹配的影响,由粗匹配到精匹配搜索策略提前排除了非匹配点的搜索,减少了图像匹配计算量,提高了匹配时间。实验结果表明:该方法在整体光照变化和轻度噪声污染时仍具有较好的鲁棒性,在外场激光照射精度测试过程中发挥了重要的作用。
参考文献
[1]姚志军,韩秋蕾.激光制导动靶照射精度测量系统[J].液晶与显示,2014,29(6):1124-1130.
[2]黄殿君,景文博,王晓曼.一种基于模板匹配的远场畸变校正方法[J].长春理工大学学报:自然科学版,2014,37(6):127-130.
[3]王伟杰.基于图像的激光命中率测量技术研究[D].长春:长春理工大学,2012.
[4]孙泽林,王昭,李明.火炮稳定精度图像测试系统[J].光学精密工程,2012,20(1):157-163.
[5]张宁,沈湘衡.采用CCD相机测量目标靶形心位置精确的方法[J].红外与激光工程,2015,44(1):279-284.
[6]王晓曼,钟钢,景文博.小波变换在靶场动态测试中的应用[J].吉林大学学报,2009,27(1):31-34.
[7]汪鲁才,易锡年,陈小天,等.自适应连续多级分区与初始阈值估计的快速模板匹配方法[J].红外与激光工程,2013,42(4):841-848.
[8]黄继碰,王延杰,孙宏海,等.激光光斑位置精确测量系统[J].光学精密工程,2013,21(4):1106-1111.
[9]Wu Tirui,Toet Alexander. Speed-up template matching through integral image based weak classifiers[J]. Journal of Pattern Recognition Research,2014,9(1):1-12.
[10]张肃,王文生.复杂背景下运动目标的光学相关识别[J].光学学报,2012,32(1):1-7.
[11]王义博.激光照射性能测试跟踪系统设计[D].长春:长春理工大学,2014.
Target Recognition Method for Laser Director Target Measurement
ZHANG Maozhen1,JING Wenbo2,LIU Xue1,WANG Xiaoman1,MAO Xuwei1,LI Yuanyuan1
(1.School of Electronics and Information Engineering,Changchun University of Science and Technology,Changchun 130022;2.School of Optoelectronic Engineering,Changchun University of Science and Technology,Changchun 130022)
Abstract:In the laser director target measurement system,the complex environments and low contrast result in recognizing dynamic target difficultly,a multi-scale template matching dynamic target recognition method based on wavelet transform was proposed. Using multi-level search and match strategy which combined multi-scale theory and wavelet transform,firstly,matching roughly in the lowest level of image resolution,excluding a large number of non-matching points and reserving quasi match points;Then matching partly layer by layer at the quasi match points along the image resolution larger,until the end of matching,recognizing precisely four corner characteristics area of the target,and positioning precisely the corner characteristics points. Experiment show that the measurement accuracy by this method for the center of dynamic target can be achieved 0.4pixel,and it is import for research on laser director irradiation accuracy. Key words:laser designator;target recognition;template matching;wavelet transform
中图分类号:TP391.4
文献标识码:A
文章编号:1672-9870(2016)02-0067-06
收稿日期:2015-06-12
作者简介:张茂桢(1989-),男,硕士研究生,E-mail:zmz1004@sina.com
通讯作者:景文博(1980-),男,博士,副教授,E-mail:wenbojing@sina.com
