基于地面三维激光扫描技术的隧道全断面变形测量方法
2016-04-11谢雄耀,卢晓智,田海洋等
基于地面三维激光扫描技术的隧道全断面变形测量方法
谢雄耀1,卢晓智1,田海洋1,季倩倩2,李攀1
(1. 同济大学地下建筑与工程系,上海 200092; 2. 上海长江隧桥建设发展有限公司,上海 201209)
在隧道工程中变形测量是必不可少的,工程师可根据测量结果评价隧道结构的安全状态,并及时调整设计参数。
地面三维激光扫描技术(terrestrial laser scanning)是一种以激光测距方式快速获取大量测点三维坐标的测量技术,能够克服传统测量技术的局限性,从而获取更加全面的隧道变形信息。
一、基于点云的隧道三维建模算法与变形分析
本文提出一种基于点云的隧道三维建模算法,用于获取隧道的相对变形。算法的流程如图1所示。下文将以一条圆形隧道为例介绍该算法,该隧道采用顶管法施工,内径2.7 m,管节宽度2 m。
图2所示的点云仍无法直观表示隧道的相对变形,本文通过建立椭圆柱面三维模型,使隧道变形可视化。
对图2所示的点云进行三维建模和变形分析,结果如图3所示。
二、激光扫描仪与全站仪在隧道变形测量中的精度比较试验
本次试验采用Leica C10激光扫描仪与Leica TS30全站仪,其厂家标称精度见表1。本试验在上海市浦东新区某污水隧道进行,该隧道采用顶管法施工,隧道内径4 m,管节宽度2 m,如图4所示。采用C10激光扫描仪与TS30全站仪对图4所示的一段隧道管节进行变形测量。
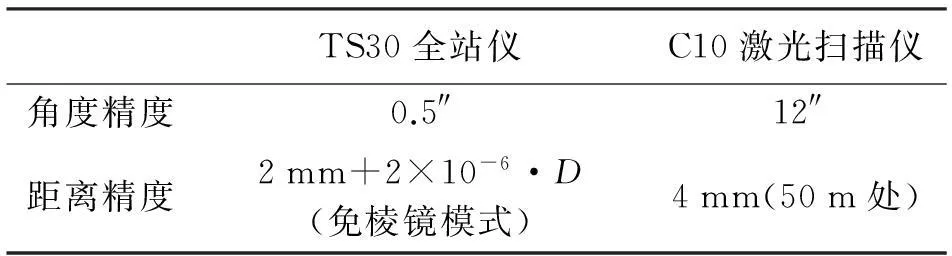
表1 TS30全站仪和C10激光扫描仪的厂家标称精度

图4 顶管隧道的一段管节
本试验结果表明(见表2),采用基于地面三维激光扫描技术的隧道变形测量方法,得到的隧道相对变形与全站仪的测量结果相差在2 mm以内。
表2TS30全站仪与C10激光扫描仪数据的椭圆拟合结果比较

参数模型TS30全站仪C10激光扫描仪相差值椭圆长轴/mm400540061椭圆短轴/mm400440022长轴与水平方向夹角(逆时针方向为正)/(°)-12315
三、应用案例
在多空间隧道中,由于混凝土板墙的阻隔,单个测站无法获取隧道的全断面点云,因此需要合理地布设测站及标靶。下面以一条多空间隧道为例介绍测站及标靶的布设方法。
上海市长江西路公路隧道越江段采用盾构法施工,外径15 m,内径13.7 m,管片宽度2 m。横断面被烟道板、车道板及隔墙分割成5部分,属于多空间隧道。采用Leica C10激光扫描仪在该隧道进行数据采集,一共布设了6个测站和12个标靶。利用风机预留孔和逃生通道作为通视条件,将6个测站的点云拼接起来。通过Cyclone软件完成拼接,形成隧道的全断面点云,如图5所示。

图5 大断面多空间公路隧道扫描测量实例
四、结论
本文研究了基于地面三维激光扫描技术的隧道相对变形测量方法,主要结论如下:
1) 进行了激光扫描仪与全站仪的精度比较试验。试验表明,采用本文所提出的三维建模分析方法对隧道点云进行处理,得到的隧道相对变形结果与全站仪的测量结果相差在2 mm以内。
2) 介绍了两个应用案例,将本文所提出的方法应用到单空间隧道中,获得了隧道的相对变形;介绍了多空间隧道的测站和标靶布设方法,获取了隧道的全断面点云。
3) 本文所提出的三维建模算法假定整条隧道的相对变形可用若干个几何形态各异的椭圆柱面表示,显然这个假定只适用于变形较小的圆形隧道。在接近破坏极限时隧道会产生较大的变形,则上述假定不再适用。因此在使用本文所提出的方法进行隧道三维建模时,建议将拟合结果与原始点云进行比较,若拟合残差过大,则说明该方法不再适用。
4) 对于变形较大的圆形隧道及非圆形断面的隧道,需要通过新的数据处理方法获取隧道的相对变形。今后的研究思路应着重于寻找合适的数学函数(如二次曲面、NURBS曲面等)来描述隧道变形后的空间几何形态。
(本专栏由徕卡测量系统和本刊编辑部共同主办)