地基GPS探测对流层斜路径湿延迟
2016-04-11丁文玉
丁文玉
(武汉大学,湖北 武汉 430000)
地基GPS探测对流层斜路径湿延迟
丁文玉
(武汉大学,湖北 武汉 430000)
Analysis of the Slant Wet Delay Measurements of GPS Using Precise Point Positioning Method
DING Wenyu
摘要:GPS斜路径湿延迟SWD包含大气水汽三维分布信息,在使用SWD时,其精度非常重要。本文使用精密单点定位(PPP)计算SWD,并将其与精度较高的水汽辐射计WVR的观测结果进行对比,用PPP解算的SWD的精度进行分析。通过比较分析发现,PPP计算的SWD与WVR计算的SWD存在1.5 cm左右的系统偏差。PPP计算的SWD的精度随着高度角的增大而提高,笼统用一个精度参数描述PPP计算的SWD的精度并不合理,在高度角10°~35°之间,两者差值的标准差随着高度角的增加而减小。在35°~90° 之间两者差值的标准差呈稳定趋势,为2.9 cm。
关键词:精密单点定位;斜路径湿延迟;水汽辐射计;精度比较
GPS斜路径湿延迟SWD(slant wet delay)的精度问题是在研究大气水汽空间分布的过程中产生的[1]。大气水汽的时空分布可用于天气预报和气候研究[2]。天顶湿延迟ZWD与大气可降水量PW成比例关系。大量试验证明,由GPS数据解算的大气可降水量PW精度优于2 mm[3-4]。GPS估计得到的天顶湿延迟ZWD应用于建立数字天气预报模型时,可以大幅度改进模型的初始状态[5]。但ZWD本质上是一段时间内所有卫星的SWD投影到天顶方向上的湿延迟的平均值,SWD中所包含的水汽分布各向异性信息被消去。ZWD无法真实表征水汽的三维分布特征。SWD是一次观测的估计值,尽管其估计精度不如ZWD,但SWD包含水汽三维分布信息,可以用来层析大气水汽的三维分布。
在使用SWD层析水汽三维分布时,其精度直接影响层析结果。水汽辐射计WVR能够观测并获得斜路径湿延迟SWD,而且测量精度较高,可以用来比较分析由PPP计算的SWD的精度。王勇等[6]使用GPS相对定位的方法计算出SWD,并与WVR观测结果进行对比,发现其相互之间的RMS值为1.51 cm。GPS精密单点定位具有观测成本低、作业机动灵活、可全天候观测、可多系统集成的优势。本文采用精密单点定位PPP解算SWD,并将计算结果与WVR的观测结果进行比较,分析由PPP解算的SWD的精度特点。
一、数据与方法
1. 数据
本文使用的数据为2002年5月25日—5月26日加拿大卡尔加里大学UOFC测站的GPS观测数据和与UOFC测站并址的水汽辐射计WVR的观测数据。GPS观测数据每隔30 s记录一次。试验中,WVR依次指向空中可视的GPS卫星。WVR每隔1 min左右获得一组数据,完成1次对所有可视卫星观测的时间为7~8 min。
2. SWD的计算方法
本文采用精密单点定位PPP计算SWD。在解算中,使用IGS精密星历和精密钟差,设置截止高度角为10°。静力学延迟采用Saastamoinen模型改正。投影函数选取GMF投影函数。地表气压由测站的海拔高度估计。PPP的观测方程[7-8]为
lφLC=ρ+c(dt-dT)+NφLC+dtrop+R
(1)

(2)

本文中,GPS斜路径湿延迟SWD由PPP待估参数中的对流层参数计算得出。采用PPP技术估计SWD具有估计模型简单,站站之间不相关,无需引入远距离测站即可估计绝对时延,处理大规模数据速度快等优点。计算公式为[9]

(3)
3. 水汽辐射计观测数据的处理
水汽辐射计WVR通过测量大气亮温实时测定大气层中的水汽含量和电磁波传播延迟[10]。试验中,WVR与GPS测站并址,设置WVR依次指向高度角为10°以上的GPS卫星。WVR每隔1 min左右获得一组数据,完成1次对所有可视卫星的观测需要7~8 min,因此对同一颗卫星,在可视时间范围内,数据记录间隔为7~8 min。
WVR测量数据易受仪器镜面液态水聚集和水汽散射效应的影响。这些影响会造成大气亮温测量错误。WVR可以估计液态水的数量,但依据这些估值不足以消去因为镜面液态水凝聚而造成的测量错误。本文处理WVR数据时,既利用液态水估值,又探测亮温突变。这样保证用于比较的数据中没有因液态水聚集而造成错误的数据。数据处理步骤如下[10]:
1) 剔除液态水估计量大于0.3 cm的观测数据。
2) 将WVR的SWD投影到天顶方向得到ZWD,计算公式为
ZWD=SWD·sinε
(4)
求出两天内所有ZWD的RMS值,再将观测记录划分为间隔为30 min的时间段,求出每个时间段内ZWD的RMS值,比较单个时间段内的RMS值与两天内所有数据的RMS值的大小[8]。如果单个时间段内的RMS值大于所有数据的RMS值,则剔除相应30 min时间段内的所有记录。这样操作虽然限制了WVR观测结果的变化幅度,但是可以剔除可能被液态水聚集损坏的数据。
二、比较结果及分析
处理完两组数据后,比较两种方法对应同一颗卫星的观测时间相差15 s以内的SWD值。在两天(48 h)的观测时段中,一共有2491组对比数据。
由WVR观测结果计算出的ZWD的平均值为6 cm,这说明试验地区在试验时间内,天气较干,空气中水汽很少。图1、图2分别为由WVR和PPP计算出的从测站到2、3、4、7号卫星的SWD值随时间的变化。

图1 PRN=2
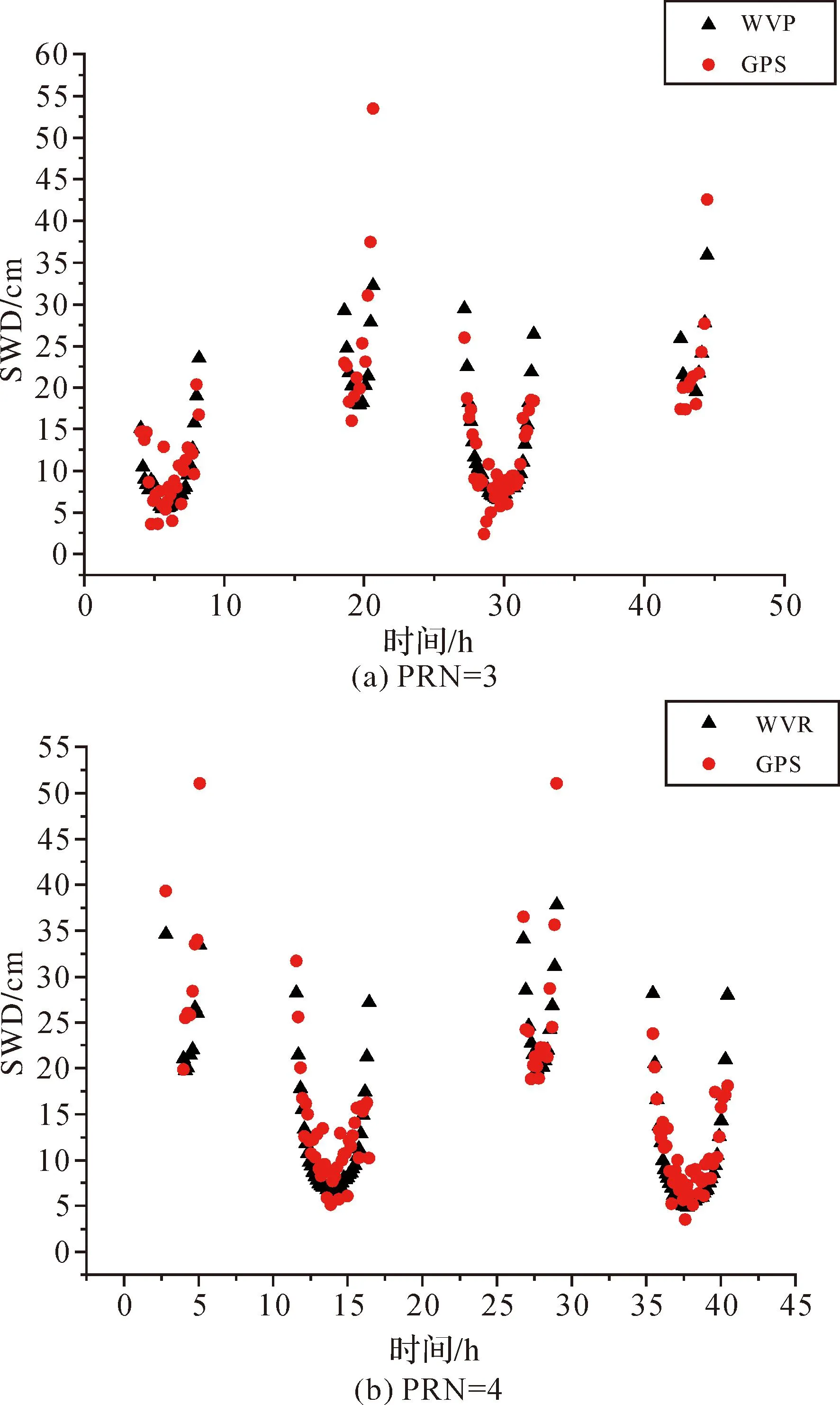

图2
从图1、图2可以看出,本文使用PPP计算的SWD和WVR观测得到的SWD的趋势基本一致,说明由PPP计算SWD的方法是可行的。图3为WVR观测得到的SWD随高度角的变化,图4为PPP解算的SWD随高度角的变化。
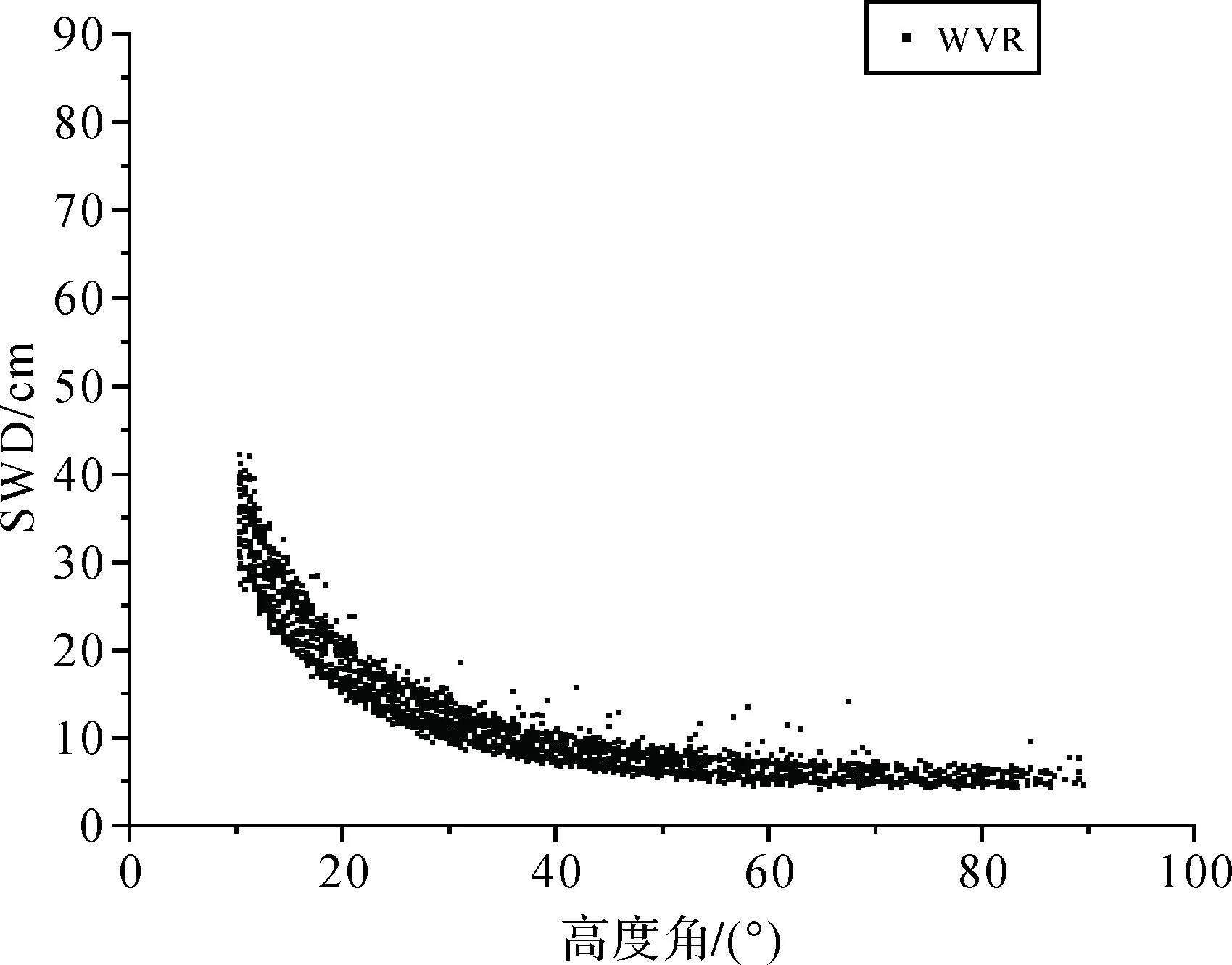
图3
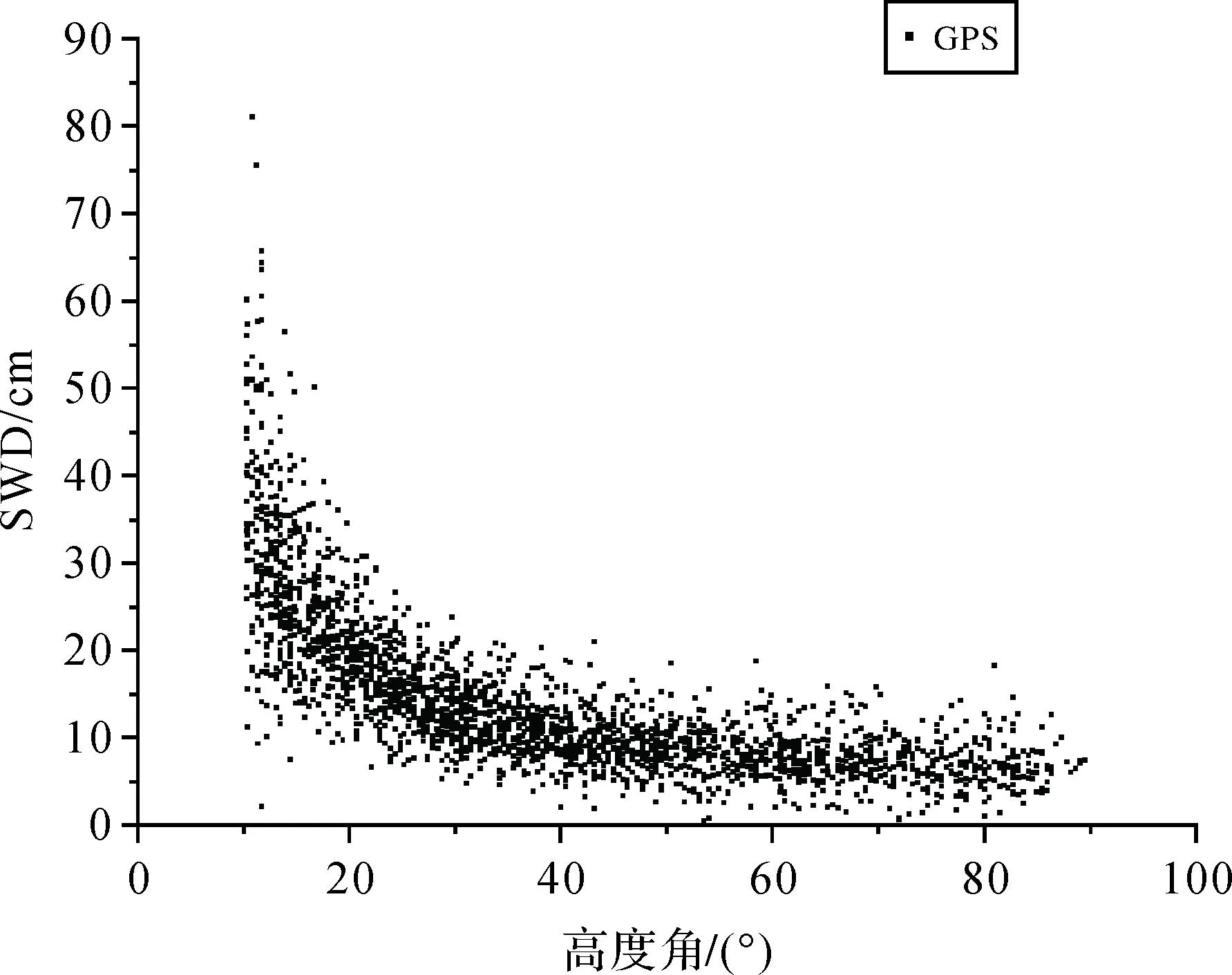
图4
由图3、图4可以看出,SWD随高度角的增加而减小,这是因为高度角较小的SWD经过对流层的路径较长,包含的水汽较多。高度角较大的SWD经过对流层的路径较短,包含的水汽较少。当高度角为90°时,SWD即为ZWD。图5为由上述两种方法计算出的SWD的差值随高度角的变化。
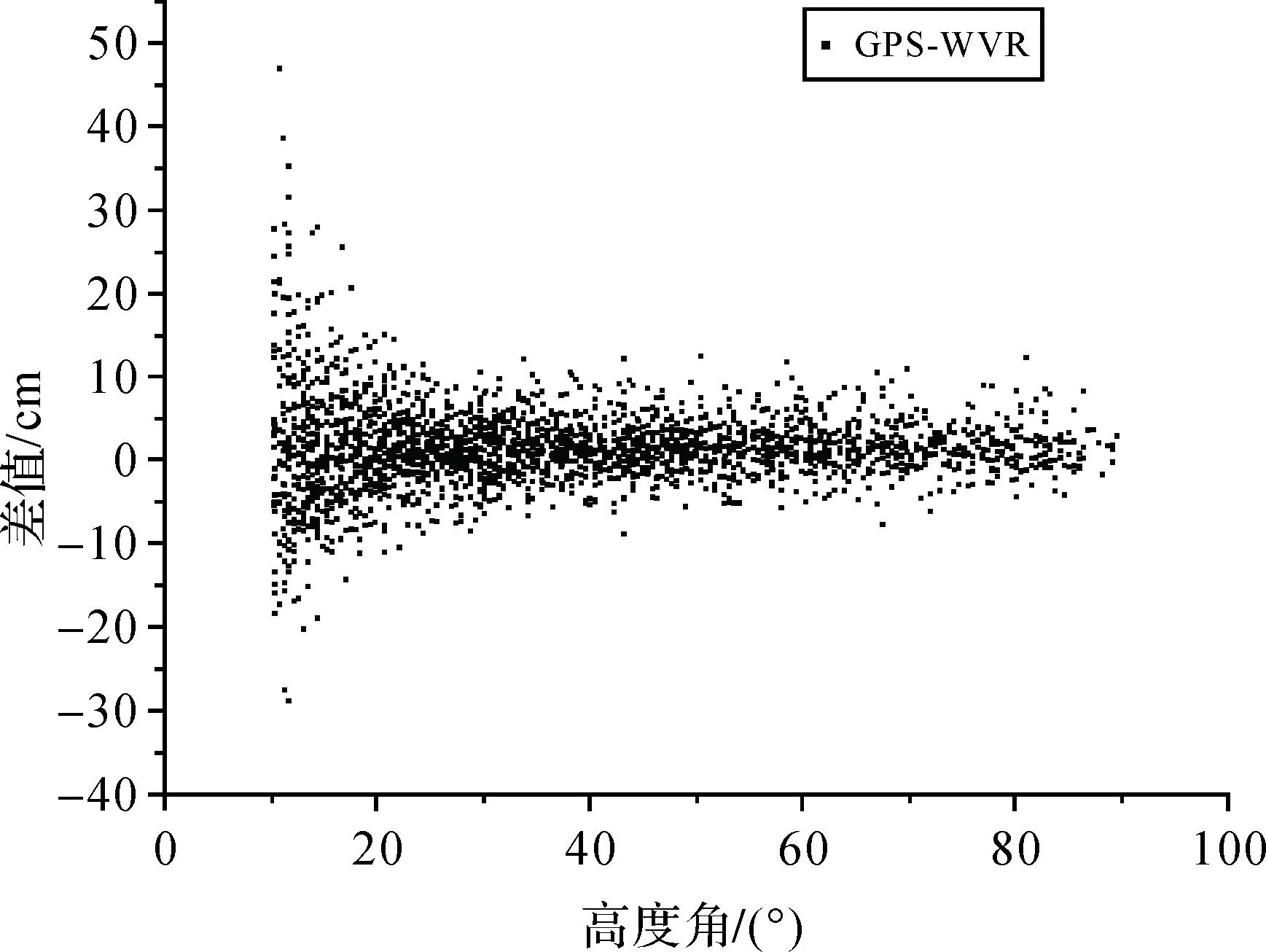
图5
从图5可以看出差值正负分布均匀,没有明显的系统误差。差值的绝对值随高度角的增加而减小。这说明高度角越大,误差越小。由PPP计算的SWD在高度角较小时精度较低,在高度角较大时精度较高。
PPP计算的SWD的精度随高度角的变化而变化,本文计算出高度角每5°一个区间,两种方法差值(PPP-WVR)的平均值和标准差结果如图6所示。

图6
从图6可以看出,由PPP计算的SWD与WVR的观测结果之间差值的平均值在1.5 cm左右,说明两者存在一定的系统误差,这与两种方法截然不同的测量原理有关。两者差值的标准差在10°~35°范围内,逐渐减小;在35°~90°范围内,呈稳定趋势,为2.9 cm。造成误差有如下原因:①WVR观测结果本身含有一定误差;②从精密单点定位PPP的计算方法看,造成SWD误差的包括多路径误差和观测噪声等随机因素,以及天顶干延迟估计模型不准确,对流层投影函数模型不准确及其他误差校正模型不准确等系统因素。
三、结束语
通过以上比较分析发现,由PPP计算SWD的方法是可行的。SWD随高度角的增加而减小。PPP计算的SWD与WVR观测的SWD存在1.5 cm左右的系统误差。在高度角10°~35°范围内,两者差值的标准差随着高度角的增加而减小;在35°~90°之间两者差值的标准差呈稳定趋势,为2.9 cm。在利用SWD层析大气水汽的三维分布时,需要考虑到SWD的精度随高度角的变化。由PPP解算的SWD在高度角较高时具有更高的利用价值。
参考文献:
[1]何锡扬. 基于PPP技术的地基GPS 大气水汽反演与三维层析研究[D]. 武汉:武汉大学, 2010.
[2]毛节泰. GPS的气象应用[J]. 气象科技, 1993(4): 45-49.
[3]BEVIS M, BUSINGER S, HERRING T A, et al. GPS Meteorology: Remote Sensing of Atmospheric Water Vapor Using the Global Positioning System[J]. Journal of Geophysics Research,1992,97(D14):15787-15801.
[4]ROCKEN C, HOVE V T,JOHNSON J, et al. GPS/STORM—GPS Sensing of Atmospheric Water Vapor for Meteorology[J]. Atmos and Ocean Tech, 1995,12: 468-478.
[5]王小亚, 朱文耀, 丁金才,等. 上海地区GPS/STORM试验与结果[J]. 全球定位系统, 2000, 25(3): 6-10.
[6]王勇,柳林涛,刘根友.基于水汽辐射计与GPS 湿延迟的对比研究[J].大地测量与地球动力学,2005,25(4):110-113.
[7]张小红. 动态精密单点定位(PPP)的精度分析[J]. 全球定位系统, 2006(1): 7-11.
[8]KOUBA J, HEROUX P. Precise Point Positioning Using IGS Orbit and Clock Products[J]. GPS Solutions, 2001, 5(2): 12-28.
[9]丁金才. GPS气象学及其应用[M]. 北京: 气象出版社, 2009.
[10]BRAUN J, ROCKEN C, WARE R. Validation of Line-of-sight Water Vapor Measurements with GPS[J]. Radio Science, 2001,36(3):459-472.
[11]NIELL A E, COSTER A J, SOLHEIM F S, et al. Comparison of Measurements of Atmospheric Wet Delay by Radiosonde, Water Vapor Radiometer, GPS, and VLBI[J]. Journal of Atmospheric and Oceanic Technology,2000(8):830-850.
中图分类号:P228
文献标识码:B
文章编号:0494-0911(2016)02-0075-04
作者简介:丁文玉(1990—),女,硕士,主要研究方向为GNSS反演对流层水汽信息。E-mail: 544362219@qq.com
收稿日期:2015-11-14
引文格式: 丁文玉. 地基GPS探测对流层斜路径湿延迟[J].测绘通报,2016(2):75-78.DOI:10.13474/j.cnki.11-2246.2016.0053.