一种固定基线单频整周模糊度求解方法
2016-04-07张伟,高珊
张 伟,高 珊
(1.深圳市大疆创新科技有限公司,广东 深圳 518057;2.广州海格通信集团股份有限公司,广州 510663)
一种固定基线单频整周模糊度求解方法
张伟1,高珊2
(1.深圳市大疆创新科技有限公司,广东深圳518057;2.广州海格通信集团股份有限公司,广州510663)
摘要:针对最小二乘方法求解单频多历元数据模糊度浮点解时需进行高阶矩阵运算,导致运算量过大的问题,提出了一种结合序贯平差和最小二乘模糊度去相关调整方法求解固定基线单频整周模糊度的算法。文中分别阐述序贯平差算法和最小二乘模糊度去相关调整方法的原理,以及序贯平差求解模糊度浮点解和协方差阵、最小二乘模糊度去相关调整方法搜索整数解的过程,最后通过残差比值和先验信息固定正确的模糊度。结果表明本方法计算量小,可以在实时嵌入式平台中运行,用低成本实现GPS高精度应用。
关键词:单频整周模糊度;最小二乘模糊度去相关调整方法;序贯平差;固定基线
0引言
全球定位系统(global positioning system,GPS)载波差分定位已经在全球得到了广泛应用,包括测量测绘、地表检测、精准农业、无人机、飞机精密进近等多个行业和领域。目前载波差分定位主要采用双频接收机实现,较少使用单频。
载波差分定位算法核心是解算整周模糊度,研究人员提出了许多方法,包括模糊度映射函数(ambiguity function method,AFM)技术[1]、最小二乘搜索(least squares search,LSS)技术[2-3]、快速模糊度解算方法(fast ambiguity resolution approach,FARA)[4]、快速模糊度搜索滤波器(fast ambiguity search filter,FASF)方法[5]、最小二乘模糊度去相关调整方法(least ambiguity decorrelation adjust,LAMBDA)[6]等,这些方法大多针对双频观测量提出。双频组合观测量波长比单频长,模糊度搜索范围小。但双频接收机价格比单频接收机高,如何利用低成本单频接收机实现载波差分定位是目前的一个研究热点。
单频载波差分定位的关键在于整周模糊度的解算,同样可以使用LAMBDA方法,一般需要多个历元数据才能求解。在处理多历元数据时,传统方法是用采用最小二乘计算浮点解,求解过程中存在高阶矩阵相乘和求逆,只能通过计算机进行事后处理,无法在嵌入式平台中实时计算,限制了单频载波差分的应用。本文采用序贯平差方法计算浮点解,对各历元数据进行间接平差处理,解决了高阶矩阵运算的问题。LAMBDA搜索整周模糊度解后,同时采用比值检验和先验信息对整周模糊度进行确认并固定模糊度。通过仿真实验对算法进行验证,证明算法可在嵌入式平台中进行实时计算,对于固定基线模糊度求解具有良好效果。
1整数最小二乘问题
载波差分定位的双差观测方程为[7]
y=Bb+Aa+e
(1)
式(1)中,y为m×1阶双差载波相位观测量,b为p×1阶基线矢量,a为n×1阶双差模糊度且为整数(a∈Zn),B为基线矢量的m×p阶设计矩阵,A为模糊度的m×n阶设计矩阵,e为观测噪声。固定基线时基线矢量保持不变,此时p=3。方程中的基线矢量和双差模糊度为待定参数。
式(1)的解算步骤分为3步[8-10]:
2)搜索模糊度整数解,按照一定的判决准则获取最优解;
3)模糊度整数解固定后求解基线矢量。
模糊度整数解的估计准则为[11]:
(2)
式(2)为整数的最小二乘非标准误差模型,整数模糊度解法称之为整数最小二乘方法,整数搜索算法是其中的关键。
2模糊度浮点解计算
假设每个历元的观测卫星保持不变,共计n+1颗卫星,构造n个双差模糊度。对于单历元而言,共计n个方程,待定参数n+3, 显然单历元无法解出待定参数,需要采用多历元解算。多历元数据的浮点解可以用最小二乘或序贯平差求解,两者的计算量存在差异。以下将阐述两种算法的原理和计算过程,并分析两者的计算量。
2.1浮点解计算过程
对于固定基线的多历元载波双差方程,假定卫星保持不变,待定参数为n+3。 历元数为g,A矩阵和B矩阵的行数m=g×n, m≥n时式(1)为满秩最小二乘问题,可用标准方程求解。标准方程为
(3)
本文采用序贯平差的方法来解决这个问题,将观测量历元分成多组,按顺序分别做相关间接平差,达到整体平差的效果,计算量分散在各个历元。具体方法为
1)选取两个历元的观测量计算初始解,此时有2n个方程,只需满足2n≥n+3, 即n≥3, 按式(3)就可以计算出浮点解和协方差,实际应用中一般要求n≥5;
2)计算出初始解后,每获取一组新的历元观测数据,采用序贯平差的方式更新浮点解和协方差阵。
浮点解和协方差阵的更新依据序贯平差的原理进行,具体为[12]
(4)

(5)
按间接平差滤波原理得到的递推解为
(6)
式(6)中,
(7)
(8)
(9)
引入符号
(10)
则递推结果整体表示为
(11)
误差估计为
(12)
式(11)中,各矩阵行数和列数的最大值均为n+3。在计算初始解之后,每个历元按照式(11)更新浮点解和协方差阵,计算量保持不变,嵌入式系统可负荷。浮点解和协方差阵计算之后,每个历元再用LAMBDA方法求解模糊度整数解。
2.2计算量分析

为简化分析,最小二乘和序贯平差中的权阵取单位阵,乘法运算时其计算量不予考虑。
(13)
根据矩阵相乘的运算量计算方法,式(3)的浮点加法和乘法运算次数均为g×(n3+7n2+12n)+(n+3)2。 式(3)还包括一次对n+3阶矩阵求逆的运算。
用相同方法分析序贯平差的运算量,g=2时序贯平差和最小二乘计算量相等。g>2时浮点加法运算次数为6n3+36n2+66n+34, 浮点乘法运算次数为6n3+36n2+62n+27。 序贯平差计算过程中还包括一次n阶矩阵求逆的运算。
由以上分析可知,当变量保持不变时,传统最小二乘的运算量和历元数成正比,而序贯平差的运算量保持不变,当历元数大于5时,序贯平差的运算量开始小于最小二乘。
3LAMBDA方法求解整数解
模糊度的整数解按照估计准则式(2)来进行搜索,即求χ2(α)的最小值。需要在离散空间中模糊度计算χ2(α)求取最小值,没有标准解法。首先需要将整数解空间Zn缩小到一个子空间,且该子空间包含整数解。该子空间可以表示为[13]
(14)

3.1基本原理
LAMBDA算法基本原理为[13-14]:
1)a∈Zn, 寻找n×n阶矩阵Z, 满足:a为整数时,z=ZTa也为整数;z为整数时,a=(ZT)-1z也为整数。此条件等价于[8]:Z中所有元素为整数,且det(Z)=±1;
2)对原始矩阵做如下变换:
(15)
(16)
搜索空间变换为
(17)

3.2搜索空间的确定

4整周模糊度确认
整周模糊度求解的最后一个步骤是模糊度确认,主要功能是从可能的整周模糊度整数解中选取最优解,并验证其正确性。如果固定的模糊度错误,基线解将一直错误。
最常用的一种检验方法是比例检验法[14],通过次小残差平方和与最小残差平方和的比值来检验,即
(18)
式(15)中,Ω2为次小残差平方和,Ω1为最小残差平方和,τ为阈值。ratio大于τ认为最优解正确。
τ的取值很关键,文献[15]建议取2,但在实际应用中太小,应按照实际情况进行取值。
单频载波差分定位用几个历元来确定整周模糊度较难实现,正确的模糊度应具有重复性,因此可以通过多历元验证模糊度的正确性,即序列有效性检验。由于采用序贯平差算法,随着历元数的增多,理论上系统噪声会降低,因此正确模糊度的ratio值从整体上而言随着历元的增多而增大。如果连续一段时间内,搜索到的最优模糊度相同,ratio值均大于阈值,且整体上随着历元数的增多而增大,即可以认为该组模糊度是正确的模糊度解。
基线矢量的先验信息也可用于模糊度检验。在短距离定向时,可以知道基线长度的大概范围。正确的模糊度解对应的基线长度需要满足该范围,不满足则认为不是正确解[16]。
如果能获取伪距观测量,可以进行伪距差分定位。伪距差分定位结果的误差一般在4 m内,可以用伪距差分计算的基线矢量同载波差分计算的基线矢量比较,两者的误差超过一定范围则认为该整数解错误。
5仿真实验
通过三组实验来验证算法正确性和算法性能,包括4 m短基线定向实验、500 m基线静态实时差分定位(real-time kinematic,RTK)解算实验以及3 000 m基线静态RTK实验。
定向实验设备为定位定向接收机,可采集GPS L1频点数据,运行平台为数字信号处理器(digital signal processor,DSP)。接收机的两个天线固定放置,距离约4 m,接收机输出L1频点观测数据和基线解算结果,数据频度为1 Hz。接收机5 min内定向成功则复位,未成功等待定向成功后复位。复位次数共计1 436次,输出基线矢量结果的历元数共计267 907组。
采用天宝公司GPS数据后处理软件解算观测数据,得到基线长度为4.056 m,基线矢量为(-3.105 m,-2.077 m,1.579 m),方位角为64.974°。和后处理软件计算结果比较,定位定向接收机计算的直角坐标系下轴向误差均在0.02 m内,基线长度误差在0.01 m内,方位角误差在0.1°以内。误差曲线如图1所示。
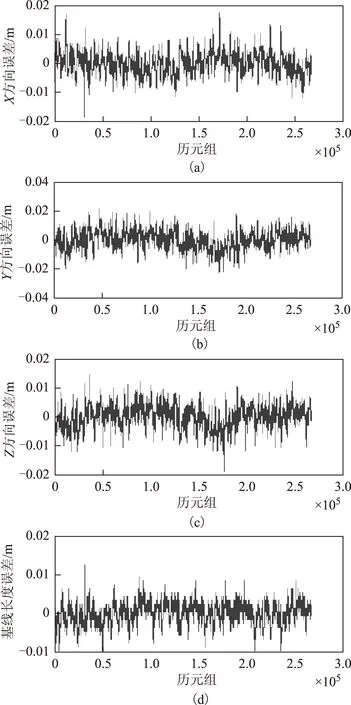
图1 短基线定向基线矢量误差
1 436组观测数据均计算出正确的整周模糊度,从可以进入模糊度解算的历元开始算起,最长的模糊度固定时间为470 s。整周模糊度固定时间的统计如表1所示。
表1 4 m基线模糊度固定时间统计
RTK实验是在某楼顶架设基准站,基准站信息和观测数据通过电台发射。基准站接收的频点包括GPS L1/L2。流动站的电台接收到基准站数据后发送给GPS L1/L2双频接收机。接收机观测数据和基准站数据采集后进行后处理仿真。首先采集1 h的GPS双频数据供天宝后处理软件解算基线矢量,1 h之后流动站接收机每采集6 min数据后复位一次。由于时间所限,500 m基线实验共复位61次,3 000 m基线共复位58次。
500 m基线天宝后处理软件解算得到基线长度为498.086 m,基线矢量为(-61.409 m,-249.464 m,426.716 m)。和天宝后处理结果比较,本文算法的轴向误差在0.03 m内,基线长度误差在0.03 m内。误差曲线如图2所示。
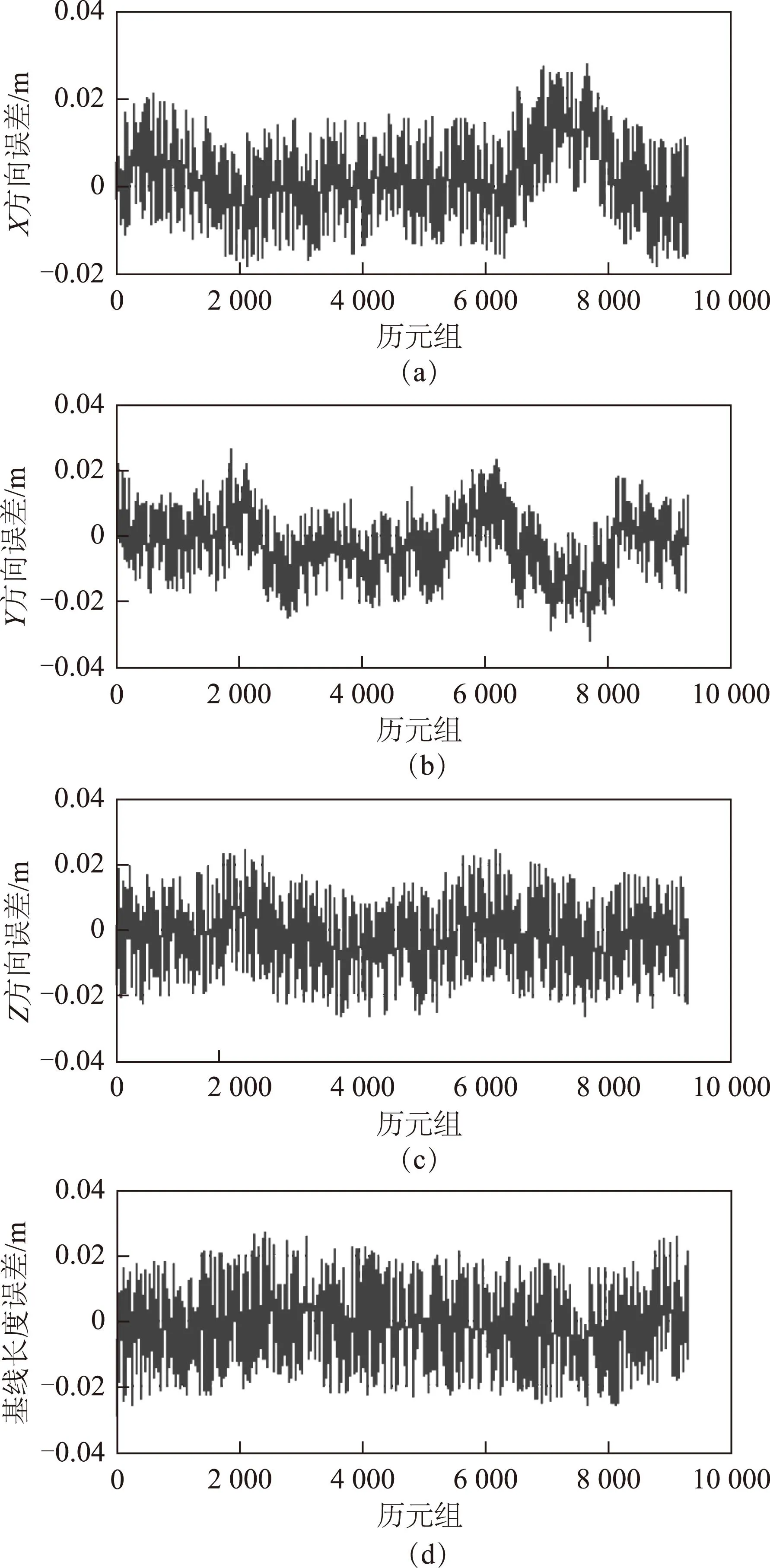
图2 500 m基线误差
500 m基线整周模糊度固定时间的统计如表2所示。

表2 500 m基线模糊度固定时间统计
3 000 m基线天宝后处理软件解算得到基线长度为2 945.623 m,基线矢量为(1 831.651 m,1 554.291 m,-1 704.679 m)。和天宝后处理结果比较,本文算法的轴向误差在0.05 m内,基线长度误差在0.05 m内。误差曲线如图3所示。
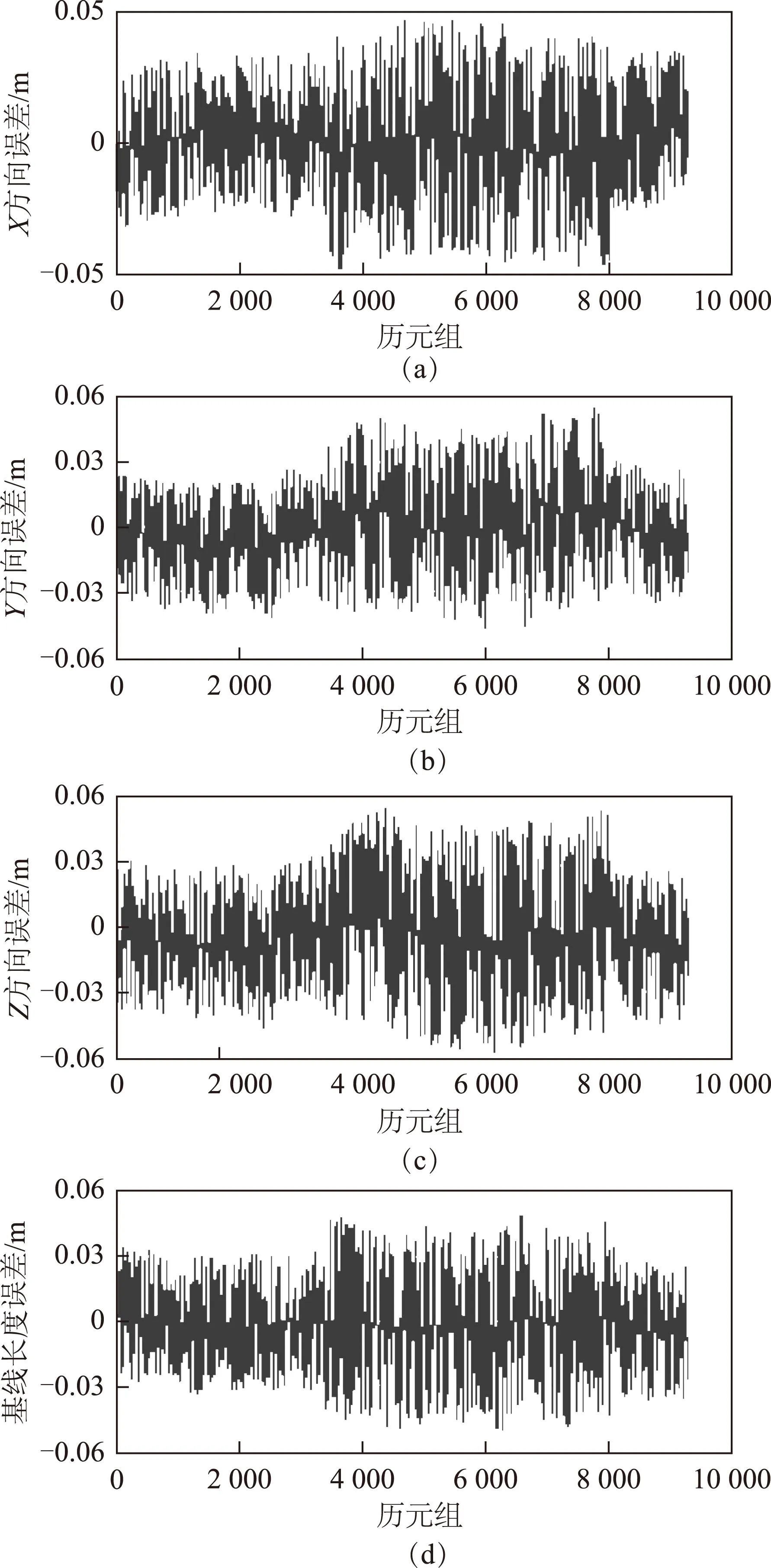
图3 3 000 m基线误差
3 000 m基线整周模糊度固定时间的统计如表3所示。

表3 3 000 m基线模糊度固定时间统计
对三组试验的原始观测值进行后处理仿真,比较序贯平差和标准最小二乘解算浮点解的运算时间,对比结果如表4。

表4 序贯平差和最小二乘解算浮点解时间比较
从实验结果可知,序贯平差计算浮点解的计算量较稳定,历元数5个以上时,最小二乘的计算量超过序贯平差,且计算量和历元数呈正比。模糊度固定时间和基线长度呈正比,主要原因是距离增加导致两点之间信号传播空间误差的相关性降低,需要更长的时间进行固定。基线解算误差和基线距离呈正比,原因可能是天宝后处理软件采用双频去电离层组合求解基线,而单频差分无法完全消除电离层误差,导致误差增大。
6结束语
单频载波差分定位具有成本低,系统组建简便的特点,在某些领域具有较高的应用价值。本文采用序贯平差方法计算整周模糊度浮点解,LAMBDA方法求解整周模糊度整数解,并利用ratio方法和基线矢量的先验信息对模糊度进行固定,实验结果表明该方法可行。该方法具有求解速度快、计算量小、适用于实时嵌入式系统等特点,可应用于静态定向和静态RTK等领域。
参考文献
[1]MADER G L.Rapid static and kinematic global positioning system solutions using the ambiguity function technique[J].Journal of Geophysical Research,1992,97(B3):3271-3283.DOI:10.1029/91JB02845.
[2]HATCH R.Instantaneous ambiguity resolution[C]//The Institute of Navigation.Kinematic Systems in Geodesy,Surveying,and Remote Sensing.New York:Springer,1991(4):299-308.DOI:10.1007/978-1-4612-3102-8_27.
[3]HATCH R.Ambiguity resolution in the fast lane[C]//The Institute of Navigation.Proceedings of the 2nd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 1989).Colorado Springs,CO:The Institute of Navigation,Inc.,1989:45-50.
[4]FREI E,BEUTLER G.Rapid static positioning based on the fast ambiguity resolution approach FARA:theory and first results[J].Manuscripta Geodaetica,1990,15(6):1059-1067.
[5]CHEN Dingsheng.Fast ambiguity search filter (FASF):a novel concept for GPS ambiguity resolution[C]//The Institute of Navigation.Proceedings of the 6th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 1993).Salt Lake City,UT:The Institute of Navigation,Inc.,1993:781-787.
[6]TEUNISSEN P J G.Least-squares estimation of the integer GPS ambiguities[R].Beijing,International Association of Geodesy,1993.
[7]TEUNISSEN P J G.The Least-squares ambiguity decorrelation adjustment:a method for fast GPS integer ambiguity estimation[J].Journal of Geodesy,1995,70(1):65-82.DIO:10.1007/BF00863419.
[8]TEUNISSEN P J G.A new method for fast carrier phase ambiguity estimation[C]//The Institute of Electrical and Electronics Engineers(IEEE).Proceedings IEEE Position,Location and Navigation Symposium PLANS94.Las Vegas,NV:IEEE,1994:562-573.DOI:10.1109/PLANS.1994.303362.
[9]JONGE P J DE,TIBERIUS C C J M.A new GPS ambiguity estimation method based on integer least squares[C]//The Institute of Navigation.Proceedings of the 3rd International Symposium on Differential Satellite Navigation Systems DSNS94.London:The Institute of Navigation,Inc.,1994:9.
[10]JONGE P J DE,TIBERIUS C C J M.Fast positioning using LAMBDA method[C]//The Institute of Navigation.Proceedings of the 4th International Symposium on Differential Satellite Navigation Systems DSNS95.Bergen:The Institute of Navigation,Inc.,1995:8.
[11]JONGE P J DE,TIBERIUS C C J M.The LAMBDA method for integer ambiguity estimation:implementation aspects,Delft Geodetic Computing Centre LGR Series,No.12[R].Delft,The Netherlands:Delft University of Technology,1996.
[12]宋力杰.测量平差程序设计[M].北京:国防工业出版社,2008:89-93.
[13]TEUNISSEN P J G,TIBERIUS C C J M.Integer least-squares estimation of the GPS phase ambiguities[C]//International Association of Geodesy.Proceedings of International Symposium on Kinematic Systems in Geodesy,Geomatics and Navigation KIS94.Banff,Canada:International Association of Geodesy,1994:221-231.
[14]TEUNISSEN P J G.The invertible GPS ambiguity transformations[J].Manuscripta Geodaetica,1995,20(6):489-497.
[15]LANDAU H,EULER H.On the fly ambiguity resolution for precise differential positioning[C]//The Institute of Navigation.Proceedings of the Fifth International Technical Meeting of the Institute of Navigation,Albuquerque:The Institute of Navigation,Inc.,1992:607-613.
[15]徐金玉,吴简彤,应畑标.动态快速求解整周模糊度的LAMBDA算法[C]//中国造船工程学会.2006年船舶通讯导航学术会议论文集.上海:中国造船工程学会,2006:188-191.
A Single Frequency Ambiguity Calculation Algorithm in Fixed Baseline
ZHANGWei1,GAOShan2
(1.DaJiang Innovation Technology Co.,Ltd.,Shenzhen 518057,China;2.Guangzhou Haige Communications Group Incorporated Company,Guangzhou 510663,China)
Abstract:Generally,the fixed baseline’s single frequency integer ambiguity resolution calculated by multiple epoch data,the first step is to calculate the ambiguity float solution-traditionally use least squares method.When dealing with multiple epoch data,this method requires high-order matrix operations,leading to excessive computation.Aiming this problem,the paper proposes a new algorithm of fixed baseline single frequency multi-epoch ambiguities resolution that be combined with sequential adjustment and the LAMBDA method.Each epoch data indirect adjust by sequential adjustment algorithm in sequence.Therewith,the float ambiguities and their variance covariance matrix computed.The LAMBDA method provides the integer least-squares estimate for the ambiguities.In the last,using ratio method and auxiliary information fix the precise integer ambiguities.The result indicate this method is a small amount of calculation and can run in real time embedded platform,and with low cost to achieve high precision GPS application.
Key words:single frequency integer ambiguity;LAMBDA;sequential adjustment;fixed baseline
中图分类号:P228
文献标识码:A
文章编号:2095-4999(2016)-01-0088-06
作者简介:第一张伟(1983—),男,江西赣州人,工程师,主要从事卫星导航高精度定位研究。
收稿日期:2015-06-01
引文格式:张伟,高珊.一种固定基线单频整周模糊度求解方法[J].导航定位学报,2016,4(1):88-93.(ZHANG Wei,GAO Shan.A Single Frequency Ambiguity Calculation Algorithm in Fixed Baseline[J].Journal of Navigation and Positioning,2016,4(1):88-93.)DOI:10.16547/j.cnki.10-1096.20160117.
