基于激光三角法的倾斜角测量系统
2016-04-01张劲峰张继业
张劲峰,张继业
( 1. 西南交通大学 牵引动力国家重点实验室,成都 610031;2. 西南科技大学 计算机科学与技术学院,四川 绵阳 621010 )
基于激光三角法的倾斜角测量系统
张劲峰1,2,张继业1
( 1. 西南交通大学 牵引动力国家重点实验室,成都 610031;2. 西南科技大学 计算机科学与技术学院,四川 绵阳 621010 )
摘要:显微测量中倾斜会导致显微图像的变形。本文利用多光束改进传统的激光三角法,提出一种多光斑激光三角法检测光学成像系统倾斜角度和方向。首先利用双楔镜分离扩束后的激光光束,形成近似平行的四束光束;然后将四束光束同时投射到平面镜上,反射后利用CCD接收到四个光斑。由于四个光斑间距的变化只与成像系统倾斜角度有关,对成像系统前后的平移不敏感,因此避免了平移带来的影响。通过计算四个光斑间距的变化可以补偿成像系统倾斜角度,减少倾斜所带来的图像变形。实验结果表明, 构建的多光斑激光三角法测量光路能够准确快速的检测出倾斜角度变化。该方法可以应用在固体核径迹检测、面型检测等要求检测小角度变化的领域。
关键词:光学检测;激光三角法;光斑
0 引言
在显微图像测量时,为获得全局完整的图像,通常将检测材料在显微镜下进行二维扫描来获取图像。在显微图像的子孔径扫描及对焦获取过程中,由于导轨的平面度误差和外界环境影响,导致被检测材料在2 µm空间内产生平移和倾斜。通常,被检测材料上的检测目标以万计,直径从几微米到几十微米。由于2µm的移动已经达到检测目标的尺寸数量级水平,并且被检测材料的倾斜,使得检测目标图像变形,对显微图像精度产生了较大影响。为保证被检测材料检测装备获取准确的显微图像,要求系统能实时测量被检测材料的移动,并且能实时探测与补偿其转动角度[1]。
为了提高图像测量的精度,研究人员提出了各种不同的图像拼接方法[2],并探讨了影响图像拼接精度的各种因素。通常采用两种显微图像拼接方法。一种是frame-to-frame方法,尽管相邻图像的拼接精度较高,但微小的配准误差会产生图像拼接的累积误差。第二种方法通过建立图像拼接的全局配准模型,同时求解所有图像的配准参数以消除累积误差。这两种方法依赖于图像本身的特征进行配准,拼接模型通常比较复杂,目标函数的求解速度较慢,对于大规模显微图像拼接效率较低[3]。并且在显微图像的扫描过程中,由于导轨等硬件的运动精度和其它外界原因,光学成像系统会出现过焦、散焦、偏转、错位和倾斜等变化,导致显微图像的质量下降,使得后续的图像分割、分类、拼接与计数等工作难以保证精度[4]。针对发生偏转、错位的显微图像拼接,有研究者提出利用硬件的检测精度来实现无特征显微图像拼接[5]。针对过焦、散焦的显微图像,主要研究利用图像清晰度评价函数来实现精确聚焦[6-7];有研究者利用特殊设计的硬件直接测量光斑的变化,并且对过焦、散焦的显微图像进行实时补偿,提高图像处理精度和速度。还有研究者利用特殊设计的双光路直接测量尺寸,以减少外部因素的影响[8]。以上研究工作主要集中解决光学成像系统过焦、散焦、偏转、错位等变化对显微图像的影响。研究工作较少涉及到倾斜对图像的影响。
为了满足显微图像测量过程中对测量精度和速度的要求,本文分析了影响显微图像获取精度的外界因素。在此基础上,针对光学成像系统倾斜所导致显微图像的质量下降和变形问题,提出了一种用平行光改进传统的激光三角法的方法,检测光学成像系统倾斜角度和方向,对显微图像偏转进行实时补偿,消除光学成像系统倾斜所带来的图像的偏差,为后期显微图像的分析打下良好的基础。
1 倾斜角测量和补偿原理
1.1 激光三角法的改进
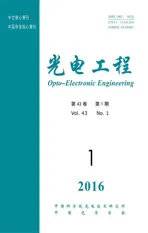
激光三角法是最常用的测量技术之一。其基本原理是:激光光束投射在平面镜上,被平面镜反射后,通过物镜在CCD上形成点光斑。随着平面镜变化,点光斑在CCD上的成像位置也在变化。通过计算CCD上点光斑位置,就可以计算出平面镜的偏转角度[9-10]。如图1所示。

图1 激光三角法原理Fig.1 Laser triangulation method principle
有两个因素会同时影响CCD上光斑的位置:第一个因素是平面镜的平移距离;第二个因素是平面镜的倾斜角。这两种因素都会影响平面镜的偏转角度。要区分这两种因素对光斑在CCD位置的影响是比较困难的。为了有效的利用激光三角法测量出平面镜的倾斜角,必须考虑这两种因素同时对光斑在CCD位置的影响,并且消除平面镜的平移带来的影响。
本文使用多束平行光束改进传统的激光三角法,消除平面镜的平移带来的影响,测量了平面镜倾斜角。改进的激光三角法原理如图2所示。它由两束平行光束组成,并在CCD上形成了两个光斑。
图2(a)表示两束平行光束在平面镜上反射后在CCD上形成了两个光斑。l是两束平行光束之间的距离。点A和B分别是两束光束在平面镜上的反射点。为了能够清楚的讨论平面镜平移和转动角对光斑位置的影响,分别讨论平移和转动单独发生时的光斑位置。图2(b)表示当平面镜仅仅发生平移时在CCD上虚拟光斑的位置,分别是a1和a2。两个光斑之间的距离为(a2–a1)。图2(c)表示平面镜仅仅发生转动时光斑的位置。当平面镜以A点为中心转动角度β时,两束光束在平面镜上的反射点分别是点A和B',在CCD上形成的光斑分别是b1和b3。当平面镜以B点为中心转动是角度β时,反射点B处的光束在CCD上形成的光斑是b2。图2(d)表示平面镜同时发生平移和转动时在CCD上形成的实际的光斑位置。当平面镜平移△x,并且以A点为中心转动角度β时,两束光束在CCD上形成的光斑分别是b1和b3。其它3个光斑的意义如前所示。由图2可知,平面镜的旋转角的变化使得两束激光光束在平面镜入射点发生了变化,入射点的变化又导致了在CCD上两个光斑间距离的变化。通过分析改进激光三角法对光斑的影响效果,可以获得如下两个特殊的结论。
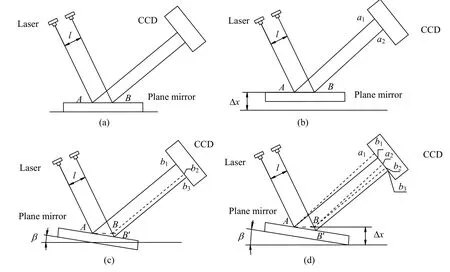
图2 平面镜运动及改进原理 (a) 平行光;(b) 平移;(c) 转动;(d) 平移和转动Fig.2 Plane mirror moving and improved principle. (a) Parallel light;(b) Translation;(c) Rotation;(d) Translation and rotation
第一个是关于平面镜的平移。平面镜平移主要是使光斑整体同时平移。平面镜平移距离△x导致了CCD上的两个光斑产生整体的位移。在这种平面镜平移的情况下,设两个光斑的整体位移量是△h1;
第二个是关于平面镜的旋转。当平面镜以A点为中心转动角度β时,平面镜的旋转不仅使光斑整体同时平移,而且还影响两个光斑之间的距离变化。这是因为平面镜的旋转角的变化使得两束激光光束在平面镜入射点发生了变化。入射点的变化使得CCD上两个光斑之间距离发生变化。两个光斑之间距离的变化反映了被测平面镜倾斜角度β变化。在这种平面镜旋转的情况下,设两个光斑的整体位移量是△h2,两个光斑之间的距离的变化量是△b。
因此,只要测量两个光斑在CCD上的坐标值,就能计算出平面镜倾斜角度。
根据图2所示光学几何关系,可以得出平面镜倾斜角β和两个光斑之间的距离的变化量△b之间关系。
当平面镜分别以反射点A和B为中心旋转同一角度β时,两束光分别获得光斑b1和b2。可以得出:

当平面镜以反射点A为中心旋转角度β时,两束光可获得光斑b1和b3。可以得出:

由式(1)和式(2),我们能够得到:

在此,(a2–a1)的值是平面镜产生平移时两个光斑之间的距离(即两个光斑质心坐标之差值)。如果平面镜仅仅只有平移,那么这个值是不变的。(b3-b2)的值是平面镜以点A为中心旋转角度β时两个光斑之间距离的偏差。可以得到如下公式:

因为平面镜旋转角β非常小,sinβ可以近似等于β。可以得到如下公式:

由以上可以知道两个光斑的整体平移距离包括两个部分:△h1和△h2。而且,只要计算这两个光斑在CCD上的位置,就能够计算出平面镜的倾斜角。
1.2 测量系统设计
多光斑光学测量系统检测光路主要由激光发射器、立方体分光镜、1/4波片、扩束镜、双楔镜、聚焦镜、CCD相机等构成。多光斑检测光路如图3所示。
多光斑激光三角法的主体是一套多光斑光学测量系统。主要是利用两块重叠的楔镜(两块楔镜一端端部部分重叠)对经过准直扩束后的光束进行分束,形成四束相对固定位置的光束,然后同时经平面镜反射,在CCD上形成四个光斑。其检测光路主要由激光发射器、立方体分光镜、1/4波片、扩束镜、双楔镜、聚焦镜、CCD相机等构成。激光器发射的640 nm波长激光束通过立方体分光镜、1/4玻片、扩束镜,最后透过楔镜分为四束光,分别投射在标准反射镜上。激光光束在标准反射镜表面发生反射,反射光再次通过楔镜、扩束镜和1/4玻片后,透过分光镜转向,通过聚焦镜投射到CCD相机上,产生四个光斑。当放置在平面x'y'反射镜绕x'旋转时,CCD上光斑沿着x轴移动;当反射镜绕y'旋转时,CCD上光斑沿着y轴移动。通过测量CCD光斑沿着x轴移动位移可以计算反射镜旋转角度。在测量光路设计中利用分光镜的透过和反射光,使得四束光束能反射到CCD上。旋转1/4波片时能消光,使得CCD上的光斑不会饱和,影响测量精度。激光器出射的光有发散角,经过扩束及准直以后才使用。
1.2.1 利用楔镜形成多光束的测量光路
光束两次通过楔镜的测量光路原理如图4所示。因为楔镜折射棱角α很小,当光线的入射角很小时,出射角也很小,偏向角满足:

式中n为光楔的折射率。

图3 多光斑光学测量光路及光斑Fig.3 Multi-light spot optics measure optical path and light spot

图4 楔镜测量光路原理Fig.4 Wedge mirror optical principle
图4中,β是平面镜绕X轴的转角。因为平面镜是在三维空间中运动,设平面镜绕Y轴的转角是γ。角度γ的计算和β是基于相同的光路,计算方法是一致的。下面以β的计算为例推导其计算方法。
根据图中的几何关系,可以计算出出射线和水平线之间的夹角α1。
当反射镜垂直时:

当反射镜顺时针旋转角度β时:

为了获得四束光束,将两块楔镜的部分重叠(两块楔镜一端端部部分重叠),对经过准直扩束后的光束进行分束后,形成四束光束。这四束光束在空间位置上有微小的夹角,不完全平行。在后期的实验过程中,应该对光路推导的公式进行标定,以减少其带来的误差。
1.2.2 多光斑检测光路数学模型
扩束筒由两个薄透镜组成,设大透镜和小透镜焦距分别为f1和f2,CCD相机前安放聚焦镜,焦距为f3。设在CCD上,两个光斑之间的距离设为b,则b=b3-b1。根据光学系统的几何关系,可得:

对b和α1求微分可得:

由式(8)和式(10)可得:

1.3 光斑图像处理流程
光斑图像处理流程如图5所示。为了减少噪声对激光光斑质心检测的影响,使用多帧平均和PGF(Peer Group Filtering)算法滤除噪声。PGF算法先将滤波窗口中邻域像素按照与中心像素特征距离按序排列,再通过fisher判别中心像素特征值最相近的点,确定同组成员;然后用同组成员像素的加权特征值代替原来中心像素特征值。PGF能很好地滤除噪声,又保护图像的边缘信息,有利于光斑质心的求解。使用在显微图像处理中效果较好的OTSU算法进行图像分割,将光斑从背景中分割出来。由于光斑比噪声要大,所以按面积排序后,去掉杂质,得到光斑。最后,利用灰度重心法获得光斑的质心。

图5 光斑图像处理流程图Fig.5 Light spot image processing flow diagram
2 实验及结果分析
基于改进的三角测量法,设计制造了一套二维移动实验装置如图6(a)所示。在图6(b)和图6(c)中,给出了两幅运动前后的CCD上四个光斑的图像。

图6 实验平台及光斑图像 (a) 实验平台;(b) 运动前的四个光斑;(c) 运动后的四个光斑Fig.6 Experiment table and spot image (a) Experiment table;(b) Four spots before moving;(c) Four spots after moving
多光斑光学测量系统安装在二维移动台上,能实现二维运动。在运动中,因为导轨的平面度误差,光学测量系统会产生倾斜。当CCD上光斑沿着x轴移动时,计算两个x方向光斑间距偏差△bx,由前面得到的公式计算光学测量系统倾斜β;同理可计算在y轴方向的光斑间距偏差△by和倾斜γ。在二维移动台前安装一块精度为λ/10的光学元件作为平面反射镜。进行三组测试,每组测试移动6次。以起始点为基准,得到6个光斑间距偏差的测量值。测量结果如图7所示。

图7 光斑测量结果 (a) X轴方向偏差△bx;(b) Y轴方向偏差△byFig.7 Measurement result of light spots (a) △bxin X direction;(b) △byin Y direction
由图7中可以得出,在多次测量过程中,对同一点测量的重复度较高。当显微图像倾斜±20 μrad内的角度变化时,误差为±5 μrad。造成误差的原因主要是采用重心法提取光斑质心的时候,由于光路调整和衍射造成光斑不是圆的,有拖尾现象等问题,给光斑质心的准确提取造成了一定的误差。
结束语
针对光学成像系统倾斜所导致显微图像的质量下降和变形问题,研究并构建了基于多光斑的激光三角法光路测量系统,能够完成光学成像系统倾斜角度和方向。并建立了反射镜旋转角度β与在CCD上两个光斑之间的距离的变化量△b之间的数学关系。能够在误差为±5 μrad内对显微图像偏转进行实时补偿,消除光学成像系统倾斜所带来的显微图像的偏差。该方法可以应用在固体核径迹检测、平板显示器检测、面型检测等要求检测小角度的领域。
参考文献:
[1]苑津莎,赵振兵,高强,等. 红外与可见光图像配准研究现状与展望 [J]. 激光与红外,2009,39(7):693-698. YUAN Jinsha,ZHAO Zhenbing,GAO Qiang,et al. Review and prospect on infrared visible image registration [J]. Laser & Infrared,2009,39(7):693-698.
[2]BROWN M,SZELISKI R. Multi-image matching using multi-scale oriented patches [C]// Proceedings of IEEE Computer Society Conference on Computer Vision and Pattern Recognition,SanDiego,USA,2005:510-517.
[3]张恒,李立春,李由,等. 显著性加权最小二乘图像匹配跟踪方法 [J]. 光电工程,2008,35(4):23-27. ZHANG Heng,LI Lichun,LI You,et al. Tracking Method Based on the Significance Weighted Least Square Image Matching [J]. Opto-Electronic Engineering,2008,35(4):23-27.
[4]弟宇鸣,叶红兵,邱晓林,等. 基于主成分变换的核径迹图像噪声分析及消除 [J]. 核科学与工程,2007,27(1):37-40. DI Yuming,YE Hongbing,QIU Xiaolin,et al. The analysis and removal of the nuclear track image noise based on principal components transform [J]. Chinese Journal of Nuclear Science and Engineering,2007,27(1):37-40.
[5]王生怀,徐风华,陈育荣,等. 基于三维精密位移工作台的显微图像拼接测量系统 [J]. 机械设计与制造,2012(2):70-72. WANG Shenghuai,XU Fenghua,CHEN Yurong,et al. A microscopy image stitching measurement system based on 3D displacement worktable [J]. Machinery Design & Manufacture,2012(2):70-72.
[6]高潮,朱红军,郭永彩,等. 一种基于边缘点计数的聚焦评价函数 [J]. 中国激光,2009,36(s2):163-167. GAO Chao,ZHU Hongjun,GUO Yongcai,et al. A focusing criterion function based on edge point counting [J]. Chinese Journal of Lasers,2009,36(s2):163-167.
[7]翟永平,周东翔,刘云辉,等. 聚焦函数性能评价指标设计及最优函数选取 [J]. 光学学报,2011,31(4):0418002.1-11. ZHAI Yongping,ZHOU Dongxiang,LIU Yunhui,et al. Design of Evaluation Index For Auto-Focusing Function And Optimal Function Selection [J]. Acta Optica Sinica,2011,31(4):0418002.1-11.
[8]范富明,程良伦,王晓芬,等. 一种新型光学快速自动聚焦系统 [J]. 光电工程,2010,37(5):127-132. FAN Fuming,CHENG Lianglun,WANG Xiaofen,et al. A Fast Detection and Compensation of Microscope Defocus Method Based on Laser Triangulation Method on TFTLCD Inspection [J]. Opto-Electronic Engineering,2010,37(5):127-132.
[9]CARL Ch,LIE B,Keith C,et al. Distance measurement utilizing image-based triangulation [J]. IEEE Sensors Journal(S1530-437X),2013,13(1):234-244.
[10] 黄战华,罗曾,李莎,等. 激光三角法大量程小夹角位移测量系统的标定方法研究 [J]. 光电工程,2012,39(7):26-30. HUANG Zhanhua,LUO Zeng,LI Sha,et al. Calibration Method of Large-arrange Small-angle Laser Triangulation Measuring System [J]. Opto-Electronic Engineering,2012,39(7):26-30.
Measurement System of Inclination Angle Based on Laser Triangulation
ZHANG Jinfeng1,2,ZHANG Jiye1
( 1. Traction Power State Key Laboratory, Southwest Jiaotong University, Chengdu 610031, China; 2. College of Computer Science & Technology, Southwest University of Science & Technology, Mianyang 621010, Sichuan Province, China )
Abstract:In microscopic measurement, the image inclination can distort the image. The traditional laser triangulation method is improved by using multi-light beam and a laser triangulation with multi-light spots was proposed to measure the inclination angle. Firstly, the laser beams expanded were separated by a double wedge, and formed four beams approximately parallel. Then, the four beams were projected to the plane mirror, and became four spots in CCD after reflected. The multi-light spot optics system could avoid the effects of translation because the distance between the four spots was only related to the inclination angle and not sensitive to the translation. By calculating the distance between four spots, the inclination angle could be compensated, therefore the image distortion was reduced. Experimental results show that the optical device, based on laser triangulation method with multi-light spot, could measure the inclination of microscopic image accurately and fast. It can be applied wildly, such as solid state nuclear track detectors, topography measurement and so on.
Key words:optical inspection; laser triangulation method; light spot
作者简介:张劲峰(1970-),男(汉族),湖南株洲人。博士研究生,主要从事光学自动化检测和图像处理等方面的研究。E-mail: zhangjinfeng70@163.com。
基金项目:国家自然科学基金项目(11172247)
收稿日期:2015-04-30; 收到修改稿日期:2015-08-20
文章编号:1003-501X(2016)01-0018-06
中图分类号:TN247
文献标志码:A
doi:10.3969/j.issn.1003-501X.2016.01.004