FPGA变间隔码预测的激光光斑采集系统设计
2018-03-01吕鸿鹏孙卫平张翔宇
骆 强,吕鸿鹏,孙卫平,常 磊,刘 灏,张翔宇,杨 勇
(西安现代控制技术研究所, 陕西 西安 710065)
精确制导武器系统的激光光源或激光指示器光斑相关参数是衡量激光制导武器相关技战术性能的重要指标[1-2]。目前通用方法是用摄像机采集激光光斑,但是由于激光光斑存在的时间非常短[3],容易出现激光光斑图像与摄像机采集的不同步,导致不良结果——捕捉不到或捕到的不是最亮的光斑图像,丢失部分或者全部激光光斑信息。针对该问题,本文设计一种基于FPGA变间隔码预测的激光光斑采集系统,用于测试常见激光光源性能参数,分析其脉冲宽度、脉冲间隔精度、能量密度、频率、编码形式等参数,采用特定算法,可以计算出光斑的大小、能量分布、光斑质心、形心等参数。
1 总体设计
1.1 系统组成
整个采集系统由标准漫反射靶、激光探测器、CCD相机、同步控制器、视频采集卡、图像测量分析软件组成,如图1所示。其中,标准漫反射靶用于激光光斑的反射;激光探测器用于捕获反射后的激光能量;CCD相机用于激光光斑图像的光电转换;同步控制器用于接收激光探测器发出的同步脉冲,并按照接收同步脉冲的时间计算下一个激光脉冲的到达时刻,从而发送信号控制相机电子快门工作;视频采集卡用于对摄像机输出的视频信号进行采集;图像测量分析软件根据采集的激光光斑图像,计算出光斑的大小、能量分布、光斑质心、形心等参数。
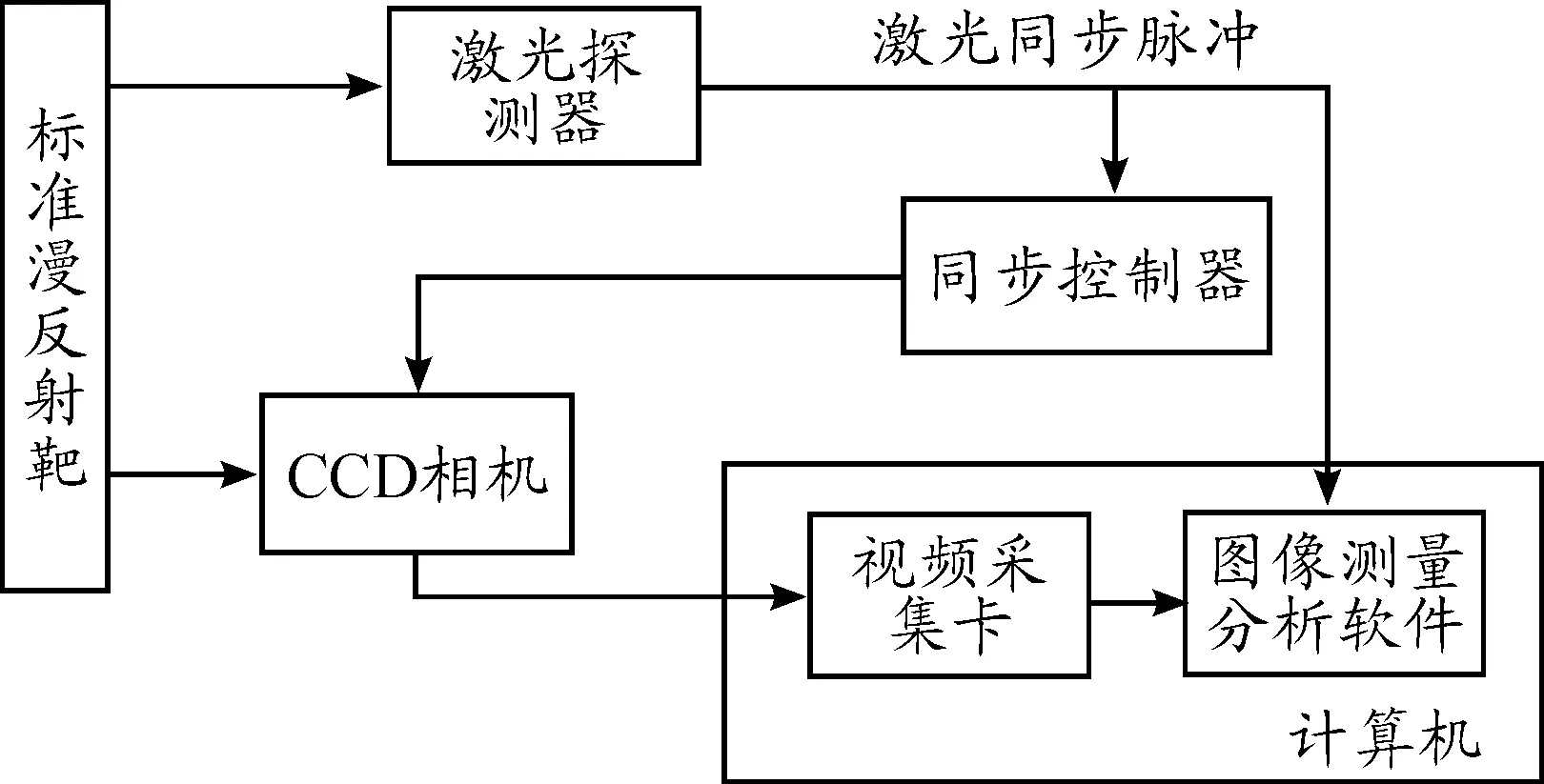
图1 光斑采集系统的组成
1.2 工作原理
同步控制器接收到激光探测器发出的激光同步脉冲后,控制CCD相机摄制经过漫反射后的激光图像,获得漫反射靶上二维激光图像的光束强度分布。同时,计算机在同步脉冲控制下接收位于漫反射靶上定标探测器的能量数据,解算出每一个光斑图像中任意一点的能量值,求得光斑总能量,采用特定算法,在图像测量分析软件中计算出光斑的大小、能量分布、光斑质心、形心等参数。
2 主要模块设计
2.1 硬件实现
CCD摄像机用于采集激光光斑, 本设计采用具有LVDS接口的高灵敏度黑白摄像机。该摄像机有效视频像元数为 1 024×1 024,CCD传感器为2/3",像元尺寸为6.45 μm×6.45 μm,视频输出格式为12 bit[4],具有外部触发控制功能。该摄像机在激光波长处,比普通摄像头敏感4倍。画面上模糊点被降低到最少,其动态范围比普通摄像头高,具体的光敏曲线如图2所示。
视频采集卡将来自CCD摄像机的激光光斑图像信号转化为数字信号并输入计算机中。视频采集卡性能好坏,直接影响形成的光电数字图像质量,进而影响光斑图像的分析、数据计算的准确性和可靠性。本设计中采用高清晰、降噪视频采集卡,该视频采集卡采用PCI接口和计算机相连。视频采集卡的工作过程是:视频信号经CCD摄像机传到视频采集卡后,首先进行A/D转换;然后PCI总线将A/D转换后的数字视频信号进行缓存,经过PCI总线缓存器,存储到计算机内存,计算机可处理采集到的图像,也可将采集到的内存图像信号传送到计算机显示卡显示。视频采集卡甚至可将A/D输出的数字视频信号经PCI总线直接送到显示卡,实现计算机终端实时显示。
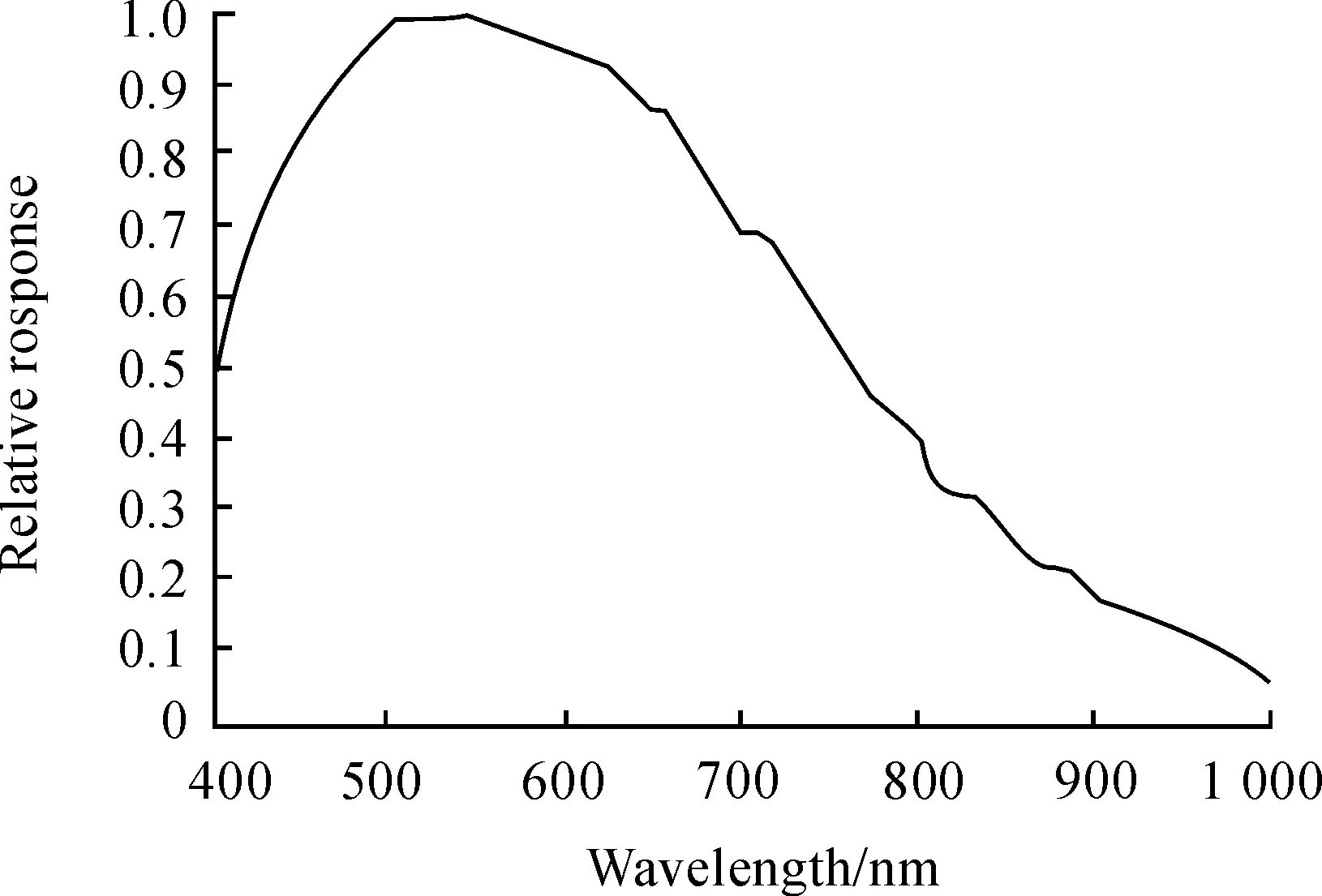
图2 高灵敏度黑白摄像机光敏曲线
同步控制器运用CCD测量激光光斑的最大困难在于激光光斑照射时间非常短,只有十几纳秒,且光斑出现时间与摄像机帧频不同步。这将导致漏采集或采集到的光斑非光能最大时刻。为确保采集到连续、完整、最亮的光斑图像,必须通过同步控制电路的预测脉冲触发CCD摄像机,使CCD摄像机在激光光斑到来之前提前打开电子快门,控制电子快门曝光时间,使光斑正好出现在快门打开阶段。
2.2 软件实现
同步控制软件通过对FPGA的编程实现,FPGA芯片采用altera公司的EP2C8T144I8芯片。同步控制软件流程如图3所示。首先利用FPGA芯片对接收到的激光同步脉冲缓存并进行周期测量,之后根据测量的周期值进行间隔分选,计算出脉冲间隔数,最后根据提前设置好的超前相位,输出快门控制脉冲,控制照相机电子快门在每一个激光脉冲到来之前开启工作,这样保证相机能够捕捉到完整的激光光斑。当激光同步脉冲的间隔和周期参数发生改变时,快门控制脉冲也会发生改变。工作原理图如图4。

图3 同步控制软件流程
首先对光斑图像进行预处理[5](图像二值化),以此为基础计算光斑的大小、能量分布、光斑质心、形心等参数。计算步骤和方法如下:
1) 光斑提取
遍历光斑图像,确定光斑峰值点所在位置,然后以此点灰度确定光斑灰度阈值:
Gthres=Gmax/e2
(1)
式(1)中,Gthres为光斑灰度阈值;Gmax为光斑最强能量点对应的灰度。依此阈值对图像进行二值化。然后清除非光斑点,只保留光斑点集,以便提取出光斑。
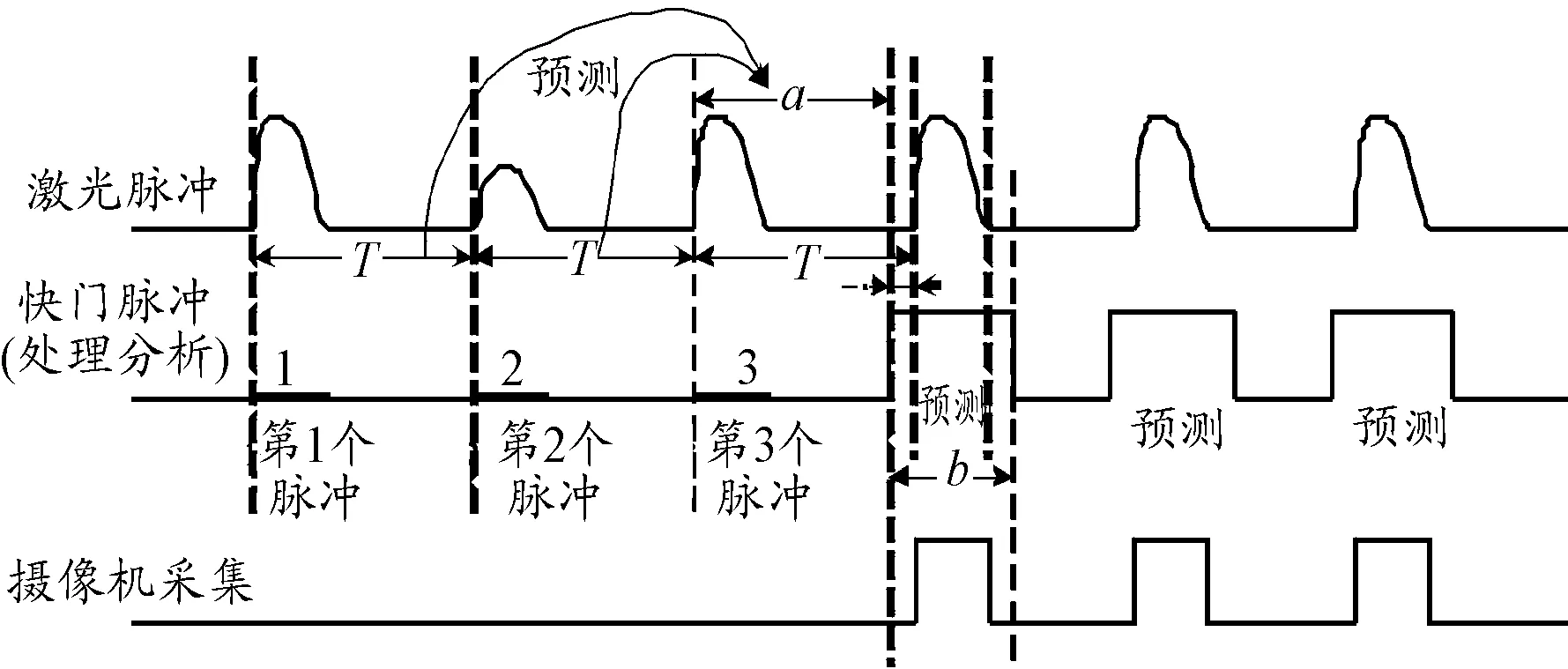
图4 快门脉冲产生示意图
2) 光斑尺寸计算
光斑尺寸是衡量激光器性能的重要参数[6]。用光斑尺寸作为衡量光束质量的标准是一种比较直观而简便的方法。一般而言,光斑大小除与聚焦激光束本身特性有关外,还与所用聚焦光学系统特性有关。光斑尺寸的计算如式(2):
(2)
式(2)中,x、y表示光斑的横轴和纵轴。
3) 光斑形心计算
激光光斑位置的准确定位是决定测量系统精度的关键因素。另外判断光强均匀性需要采用计算光斑图像形心与质心偏差的方法,所以光斑形心是光斑的重要参数。通常在确定激光光斑中心位置前需预先确定激光光斑的边缘位置,然后再计算出光斑中心位置。
(3)
式(3)中,分子表示构成图像的各个像素点的坐标和;分母N表示图像的总像元个数。
4) 光斑质心计算
这里的质心借用物理学中质心的概念,表示激光光斑能量重心/光斑强度加权平均中心[7]。
设P(x,y)为点(x,y)发出的激光光斑信号强度,根据光斑质心定义,摄像机采集的数字图像质心(xc,yc)为:
(4)
由于相机面阵CCD的离散采样,质心计算公式可以表示为:
(5)
式(5)中,i,j取遍该图像内每一像素,(xi,yj)为第(i,j)个像元对应的CCD坐标,Pij为第(i,j)个像元接收到的灰度值。
3 实验结果与分析
在远场测试时,距离被测激光漫反射靶板100 m处发射激光信号,采集的原始光斑图像如图5,原始图像包含噪声影响并且边缘粗糙,通常需要对光斑进行优化[8]。

图5 原始光斑图像
激光光斑图像预处理采用减背景法,算法开销小,速度快,可以有效去除部分噪声干扰。然后对图像进行阈值变换,变为二值图像,这种图像往往含有杂点,如图6所示,有很多孔洞和边缘毛刺,理论上激光光斑为高斯分布,边界光滑。

图6 处理后光斑图像
为准确确定光斑区域,需要对二值图像轮廓提取和筛选,目前图像识别领域常用的边界识别算法有梯度算子、Hough变换等[9],由于理想激光光斑为圆形,本文采用Sobel算子[10]对光斑边界检测。将模板在图像上移动并在每个位置采用式(6)计算对应的中心像素梯度值,激光光斑边界检测后的环形图如图7。
G(x,y)=maxGp(x,y)
(6)
Gp(x,y)=∑∑h(k,l)f(i+k,j+l)
(7)

图7 边界检测结果图
通过以上方案实现基于FPGA变间隔码预测的激光光斑采集系统,并对其进行调试和测试,测试结果如下:
1) 视频采集功能正常、能够长时间、不间断的获取采集卡上输出的数据;
2) CCD 工作在外触发模式下,图像采集连贯,激光光斑采集率达99%,CPU 占用率低。但是,当外触发信号频率过高(超过视频采集卡外触发帧频),图像显示存在一定时延;
3) 系统可获取完整的激光光斑图像,从而得到准确的激光光斑数据。
4 结论
设计并完成了一种基于FPGA变间隔码预测的激光光斑采集系统,该系统能够准确得到光斑数据,如光斑尺寸、形心和质心参数。激光光斑采集率达99%,测量速度快、精度高,在实际应用中取得了良好的效果。
[1] 李怡勇,王建华,李智.高能激光武器发展态势[J].兵器装备工程学报,2017(6):1-6.
[2] 任国光.高能激光武器的现状与发展趋势[J].激光与光电子学进展,2008,45(9):62-69.
[3] 徐亚明,邢诚,刘冠兰,等.几种激光光斑中心检测方法的比较[J].海洋测绘,2007,27(2):74-76.
[4] 吴晓宁.OK系列图像采集卡[J].科学观察,2004(3):25-26.
[5] 曹一磊,高春清.基于面阵CCD的激光光束参数测量系统精度分析[J].光学技术,2004,30(5):583-586.
[6] 胡林亭,卢显葵,金俊坤,等.CCD测量激光光斑方法研究[J].激光技术,2001,25(2):154-157.
[7] 张仁俊,刘秉琦,沈洪斌.大功率半导体激光器光斑整形和均匀化处理[J].四川兵工学报,2009,30(11):125-126.
[8] 周锐,房建成.图像测量中光斑尺寸优化及性能分析[J].仪器仪表学报,2000,21(2):177-179.
[9] KIM Y O,PAIK J,HEO J,et al.Automatic face region tracking for highly accurate face recognition in unconstrained environments; proceedings of the advanced video and signal based surveillance[C]//IEEE Conference on Advanced Video & Signal Based Surveillance,2003:29-36.
[10] VINCENT O R,FOLORUNSO O.A descriptive algorithm for sobel image edge detection[C]//Proceedings of Informing Science & IT Education Conference (InSITE),2009:97-107.