拟合次数对汽车操纵稳定性客观评价指标的影响
2016-03-30潘佳炜袁世海谢伟忠
潘佳炜 袁世海 谢伟忠
(广州汽车集团股份有限公司汽车工程研究院,广州510640)
拟合次数对汽车操纵稳定性客观评价指标的影响
潘佳炜袁世海谢伟忠
(广州汽车集团股份有限公司汽车工程研究院,广州510640)
【摘要】基于线性回归方法将传统操纵稳定性数据处理流程中的多次拟合环节优化为一次拟合,并阐述了拟合次数对汽车操纵稳定性客观评价指标的影响。将优化前、后的数据处理方法用于稳态回转和正弦输入两个试验进行对比,结果表明,优化后的方法在试验数据一致性不良的情况下能更好的保证工况极限区域客观指标获取的准确性。
1 前言
驾驶员—汽车—环境闭环系统的汽车操纵稳定性评价[1]体系包含主观评价与客观评价,其中,稳态回转、正弦输入(转向中间位置)常用于客观指标的获取[2~6]。在该两项试验的后处理阶段均需使用基于线性回归的拟合方法对试验数据进行处理,以获得相应的客观评价指标[7]。由于包括国际标准化组织(ISO)在内的关于汽车操纵稳定性的试验标准并未对拟合次数作明确要求[8],常见的做法是先对多组试验数据进行单独拟合,再分别对所有拟合曲线进行同间隔的数据重采样,最后把重采样点的平均值进行又一次拟合。研究表明,多次拟合在试验数据一致性变差的情况下容易带来系统误差,为此本文通过减少拟合次数(减少系统误差)来保证操纵稳定性客观指标的准确度,同时提高试验的可操作性。
2 基于线性回归的数据拟合误差分析
2.1操纵稳定性试验主要误差来源
操纵稳定性试验误差的来源主要是系统误差和随机误差。随机误差主要是由于环境因素(气温的细微变化等)、驾驶员操作误差(重复试验之间的操作差异)、整车振动等各类因素所导致,随机误差可通过增加测量次数来消除。系统误差主要是由于测量误差、仪器误差、环境误差、操作误差导致。与随机误差不同,系统误差只能通过分析其产生的原因并采取相应措施来解决。汽车企业一般通过使用统一的标准与相应细则来减少由仪器误差、环境误差、操作误差带来的系统误差,而测量误差与试验人员对标准的理解和执行力相关。由于ISO试验标准中未对操纵稳定性的执行细节和数据处理作详细说明,因而易导致测量方法的差异,进而使得测量误差成为系统误差的主要原因。如稳态回转试验中,并未强调每次试验的起始转向盘转角必须相同,而事实上起始转角对不足转向梯度的获取会有一定影响。国内部分企业标准对这些细节有进一步的约束,且约束方法较相近,但在数据处理方面,尤其是在试验数据的拟合次数上并未统一,这使得拟合次数成为影响汽车操纵稳定性客观评价指标的重要因素。
2.2拟合方法简介
国内外企业针对稳态回转试验和正弦输入试验的数据拟合一般选用基于最小二乘法的线性回归分析方法。根据经验,拟合多项式的阶数选取3阶或4阶。
传统操纵稳定性数据拟合方法(二次拟合法)如图1所示,因其存在两次拟合[9],系统误差也会产生两次。
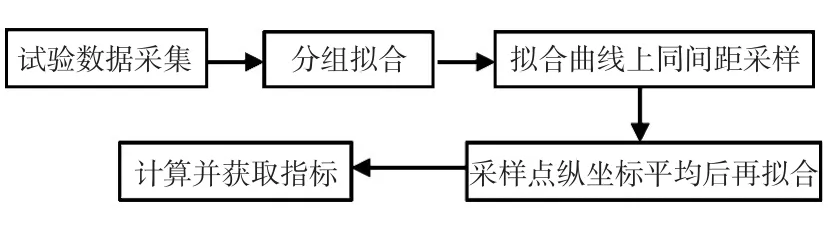
图1 传统操纵稳定性数据处理流程
通过对多个车型操纵稳定性客观评价试验数据的分析表明,将曲线拟合次数降至1次,既可以维持获得操纵稳定性客观指标的准确性,亦可以避免两次拟合带来的系统误差。
一次拟合法的操纵稳定性数据处理流程如图2所示。由图2可看出,一次拟合法是在试验数据采集完后进行数据合并,即将多组试验数据编辑为一组数据集,该数据集为所有试验数据集的并集,然后仅需一次拟合即可获得最终的拟合曲线。

图2 基于一次拟合法的操纵稳定性数据处理流程
2.3两种数据拟合方法的误差对比分析
令拟合函数put(xi)=yi+εti(i=0,1,…,m),则一次拟合法的总方差为:
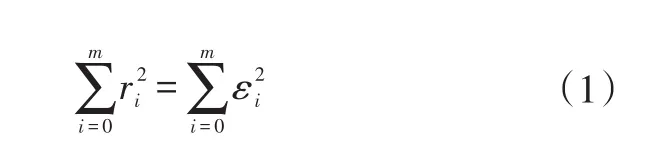
二次拟合法的总方差为:

式中,ri表示拟合值与真实值的差;xi表示拟合完成后在横坐标上的等距采样点;m表示重采样个数;yi表示真实值;当使用一次拟合法时u=1,t无实际意义;当使用二次拟合法时u=2,t为试验数据组数,根据试验标准,操纵稳定性试验需重复做3次,故取t=3;εti为拟合曲线上的采样点纵坐标与原始数据纵坐标的偏差;ε4i为二次拟合法中第2次拟合后重采样点与分组拟合后的平均值的误差。
通过对多个车型的试验数据误差分析表明,(ε1i+ ε2i+ε3i)/3+ε4i与试验数据一致性强相关,当一致性较好时,两种拟合法的总方差相差较小,否则相差明显。从操作需求上比较,稳态回转试验要保证试验数据的一致性比正弦输入试验难度大。
3 两种拟合方法应用实例对比
3.1两种拟合方法在正弦输入试验中的对比
按照企业标准,正弦输入试验时,车辆以100 km/h速度直线行驶,转向盘以0.2 Hz的频率转动,选用最大侧向加速度为0.3g进行正弦波输入。整个试验过程中,转向盘转角幅度和通过中间位置时的角速度尽量保持一致,加速踏板位置的变动尽可能小。该试验可获得转向盘中心区域的响应灵敏度以及系统迟滞区等操控特性。
图3为某车型正弦输入试验的原数据以及使用两种拟合方法获得的最终拟合曲线的对比结果。表1为采用两种拟合方法获得的正弦输入试验客观指标对比。


表1 采用两种拟合方法获得的正弦输入试验客观指标对比结果
从图3及表1可看出,采用两种拟合法获得的各客观指标相差在5 %以内,其原因是正弦输入试验的操作可重复性强,各组试验数据一致性高,因此容易使得式(2)中的(ε1i+ε2i+ε3i)/3+ε4i项获得较小值,最终与式(1)所得的总方差很接近。
3.2两种拟合法在稳态回转试验中的应用对比
根据企业标准,按固定转向半径的方法进行稳态回转试验,汽车先以最低车速在固定半径的轨迹圆上稳定行驶,通过调整转向盘使车辆中心线能在半圈内都能对准地面上的圆轨迹。然后固定转向盘不动,缓慢而均匀地加速,同时调整转向盘使汽车保持在固定半径圆上,直至汽车不能继续在圆周上行驶为止[9]。该试验通过转向盘转角、侧向加速度、不足转向度等客观指标获得车辆的不足转向线性范围及车辆稳态转向特性,对试验人员的驾驶水平要求很高。
图4为对某车型稳态回转试验的原数据采用两种拟合方法获得的最终拟合曲线的对比结果。表2为采用两种拟合方法获得稳态回转试验的客观指标对比结果。

图4 对某车型稳态回转试验原数据采用两种拟合方法获得的拟合曲线对比结果
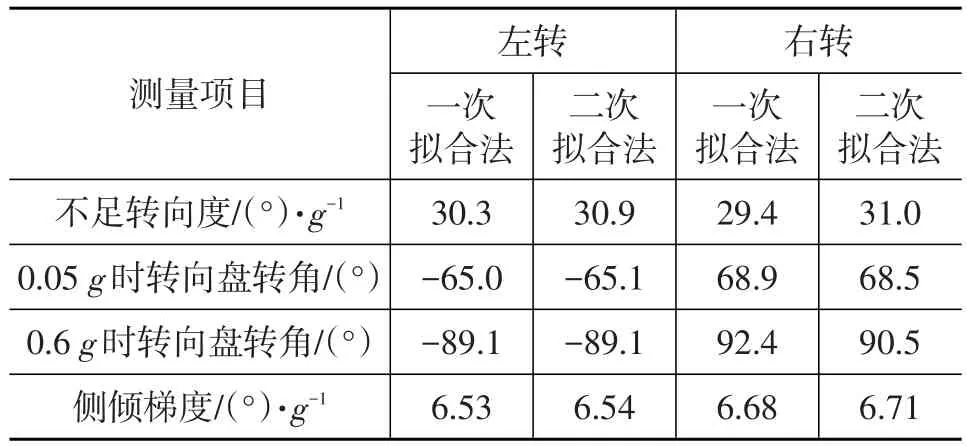
表2 采用两种拟合方法获得的稳态回转试验客观指标对比
由表2可知,左转试验时的两种方法数据拟合结果相差在1 %以内;而右转试验时的不足转向度相差约6 %,说明两种拟合方法在右转试验时的数据处理结果出现了明显差异,为此将对右转试验时所采集的原始数据进行分析。
图5为采用两种拟合方法分别对右转情况下转向盘转角与侧向加速度的3组数据进行拟合后的放大图。从图5可看出,采用二次拟合法时的第1组数据拟合曲线的转向盘转角比另外两组整体偏低了10°左右,且在0.7g处拟合曲线出现明显下拐现象,而第2组和第3组数据的拟合曲线在0.7g时仍显示上拐趋势,导致采用二次拟合法的最终曲线(右转_二次拟合平均)在末端明显偏离后两组数据;而采用一次拟合法的拟合曲线变化趋势一直与采用二次拟合法的第2、3组数据的拟合曲线变化趋势一致。

图5 右转试验时转向盘转角与侧向加速度拟合效果对比
通过图6对采集的原始数据点进行分析,查找采用二次拟合法时导致拟合曲线趋势不一致的原因。由图6可看出,第1组数据样本的侧向加速度最大值为0.6g,低于另外两组数据样本的侧向加速度最大值(接近0.7g),这导致第1组拟合曲线在0.6g~0.7g之间出现了拐点,而在0.6g以后与另外两组相比变化趋势明显趋于平缓,若在此区间做重采样,只能引入数据样本集外的插值。根据二次拟合法,需要在侧向加速度的合集范围内分别进行重采样并把纵坐标求平均后再一次拟合,由于上述曲线的趋势差异,3组拟合曲线在0.6g~0.7g之间重采样值的平均值偏小,从而给第二次拟合引入了较大的误差。
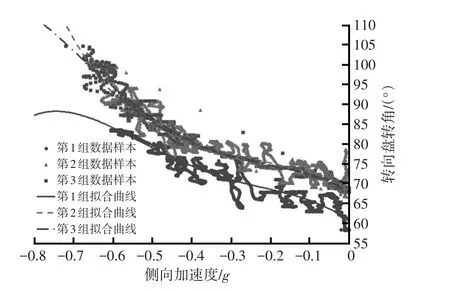
图6 右转-转向盘转角与侧向加速度原始数据点变化
由上述分析可知,采用二次拟合法进行右转试验时导致试验数据处理结果产生明显误差的原因是:数据样本纵坐标的整体偏移(试验初始转角的不一致);数据样本的最大值不同(试验的结束状态不一致);最后一次拟合前的重采样使用了试验获得数据区外的插值。根据经验,试验人员可以通过数据筛选、调整拟合曲线阶次来保证拟合曲线的趋势符合一般规律。但这些方法不利于实现操纵稳定性数据处理的程序化。同时,因为初始转角、结束工况对稳态回转试验的客观指标影响很大,迫使试验人员主观地将某组数据作为样本对其余数据组进行过滤与筛选,所获得的指标客观性变差。相比之下,采用一次拟合法则可有效避免上述不足,并能在保证指标获取准确性的前提下降低试验人员的操作难度。
4 结束语
a.一次拟合法对于既涉及到极限位置操作又对数据一致性要求高的稳态回转试验,能够在保证客观指标获取准确性的前提下降低试验人员的操作难度。
b.从编程实现的角度来讲,在算法上使用一次拟合法的拟合次数和数据的预处理步骤均比二次拟合法减少,有利于软件的设计与开发。
c.一次拟合法的应用使得试验流程不再局限于“多次测试求平均”的传统方法,为后续进行“分段试验,局部细化”提供了支持。
参考文献
1宗长富,郭孔辉.汽车操纵稳定性的客观定量评价指标.吉林工业大学自然科学学报,2004,30(1):1~6.
2ISO-International Organization for Standardization. Passen⁃ger cars -Test track for a severe lane-change manoeuvre -Part 2 Obstacle avoidance. ISO_3888-2-2002,2002.
3 ISO-International Organization for Standardization. Road ve⁃hicles - Lateral transient response test methods - Openloop test methods. ISO 7401-2003,2003.
4 ISO-International Organization for Standardization. Road ve⁃hicles - Transient open- loop response test method with pseudo-random steering input. ISO TR 8726-1988,1988.
5ISO-International Organization for Standardization. Passen⁃ger cars -Steady-state circular driving behaviour -Openloop test methods.ISO 4138-2004, 2004.
6ISO-International Organization for Standardization. Vehicle dynamics test methods—Part 1: General conditions for pas⁃senger cars.ISO 15037-1-2006, 2006.
7白艳,贾鑫,宗长富,等.汽车操纵稳定性客观评价方法综述.科学技术与工程,2012,12(6):1339~1347.
8李言宝.操纵稳定性试验评价国标与ISO的简单对比分析.2008中国汽车工程学会年会,天津,2008.
9郑红梅.汽车稳态回转试验信号实时处理系统的研究.合肥工业大学学报(自然科学版),2000,23(2):240~243.
(责任编辑文楫)
修改稿收到日期为2015年7月1日。
Influence of Data Fitting Times on Objective Evaluation Index of Vehicle Handling Stability
Pan Jiawei, Yuan Shihai, Xie Weizhong
(Guangzhou Automobile Group Co., LTD Automotive Engineering Institute, Guangzhou 510640)
【Abstract】In the conventional handling stability processing flow, the multiplex fitting is optimized to single fitting based on linear regression method, and the influence of number of fitting on objective evaluation index of vehicle handling stability is elaborated. The original data processing method and the optimized data processing method are applied in stable steering test and sine-input test for comparison. The results show that the optimized method can ensure accuracy of the objective index acquisition in the extreme condition area even with poor consistency of test data.
Key words:Vehicle, Handling stability, Objective evaluation index, Data fitting
中图分类号:U461.6
文献标识码:A
文章编号:1000-3703(2016)02-0029-04
主题词:整车操纵稳定性客观评价指标数据拟合