基于专利地图的农业机器人技术发展态势研究
2016-03-23林志坚应向伟仇秋飞吴巧玲赵云飞吴叶青
谌 凯,林志坚,应向伟,仇秋飞,吴巧玲,赵云飞,吴叶青
(浙江省科技信息研究院,杭州 310006)
基于专利地图的农业机器人技术发展态势研究
谌凯,林志坚,应向伟,仇秋飞,吴巧玲,赵云飞,吴叶青
(浙江省科技信息研究院,杭州310006)
摘要:农业机器人是农机产业的重要潜在发展方向,可提升农机企业核心竞争力、驱动科技创新及促进农业生产效率提升。为此,针对农业机器人技术绘制专利地图,从发展趋势、重点技术领域、地域分布、竞争机构及高引专利等方面开展态势研究,以为相关政府部门、企业和高校院所进一步发展农业机器人产业和技术提供情报支撑。研究结果表明:农业机器人技术真正的发展阶段出现在1993年以后,总体呈现出快速增长,而且这一趋势延续至今。机械手的末端执行器、自动导航及目标探测与定位是该领域的重点研发技术,而收获机器人、田间作业机器人、植保机器人是该领域的重点研发种类。我国近年来对于农业机器人技术的研发热情高涨,申请有大量相关专利,但专利质量相对美国和日本较低,核心专利缺失,技术水平还有待进一步提高。此外,还从政府、企业和产业园区3个层面提出了我国进一步发展农业机器人技术的对策建议。
关键词:农业机器人;专利地图;竞争情报
0引言
农业机器人以完成农业生产任务为目的,隶属于特种机器人范畴,是一种兼有四肢行动、信息感知能力及可重复编程功能的柔性自动化或半自动化智能化农业装备,集传感技术、监测技术、通讯技术及精密机械技术等多种前沿科学技术于一身。随着农业生产的日趋工业化、规模化和精准化,农业机器人已经成为农业工程领域的科研重点之一,其在育苗、移苗、嫁接和农产品收获等方面均得到了初步应用。农业机器人在提高农业生产力、改变农业生产模式、解决劳动力不足,以及实现农业的规模化、多样化和精准化等方面显示出了极大的优越性[1-10]。随着研究的深入和市场需求的不断增加,农业机器人及农业智能装备将成为提升相关企业核心竞争力、驱动科技创新和促进农业生产效率提升的重要发展方向。
为此,本文基于专利地图,开展农业机器人技术发展态势研究,得出发展趋势、重点技术领域、地域分布、竞争机构及高引专利等方面的竞争情报,为相关政府部门、企业和高校院所进一步发展农业机器人产业和技术提供情报支撑。
本研究使用了德温特专利和国家知识产权局中国专利数据库,结合关键词、IPC分类、德温特手工代码的方法进行专利检索和数据采集,共得到与农业机器人相关的德温特专利1 779项专利族,3 777件专利;中国专利715件,其中中国申请人申请的中国专利为656件(检索时间范围为1962年至2015年5月)。专利分析工具上,综合应用了Thomson公司的TDA、Thomson Innovation以及国家知识产权局出版社专利分析软件等工具。对农业机器人领域的发展规模、发展趋势、技术领域、地域分布和竞争机构等方面绘制了专利地图。
1发展趋势
从农业机器人技术年度专利走势来看(见图1),农业机器人技术发展大致可分为3个阶段:第1阶段为技术孕育阶段(1975-1992年)。最早的农业机器人技术专利申请出现在1975年,一直到1992年,每年专利申请量都不足20项,说明农业机器人技术处于孕育阶段。第2阶段为起步发展阶段(1993-2002年)。在20年的时间里,农业机器人技术每年的专利申请量保持在10~55项左右。第3阶段为高速发展阶段(2003年至今)。2003年开始,农业机器人技术每年的专利申请量出现高速增长,从2003年的38项增长到2012年的220项。
由于专利申请中存在的18个月公开期,使得大量专利还处于未公开状态,因此2013年和2014年的数据在这里不做分析。
纵观农业机器人技术专利申请数量,农业机器人技术真正的发展阶段出现在1993年以后,总体呈现出快速增长,而且这一趋势延续至今,说明国际上技术研发热情很高,短期发展前景毋庸置疑。
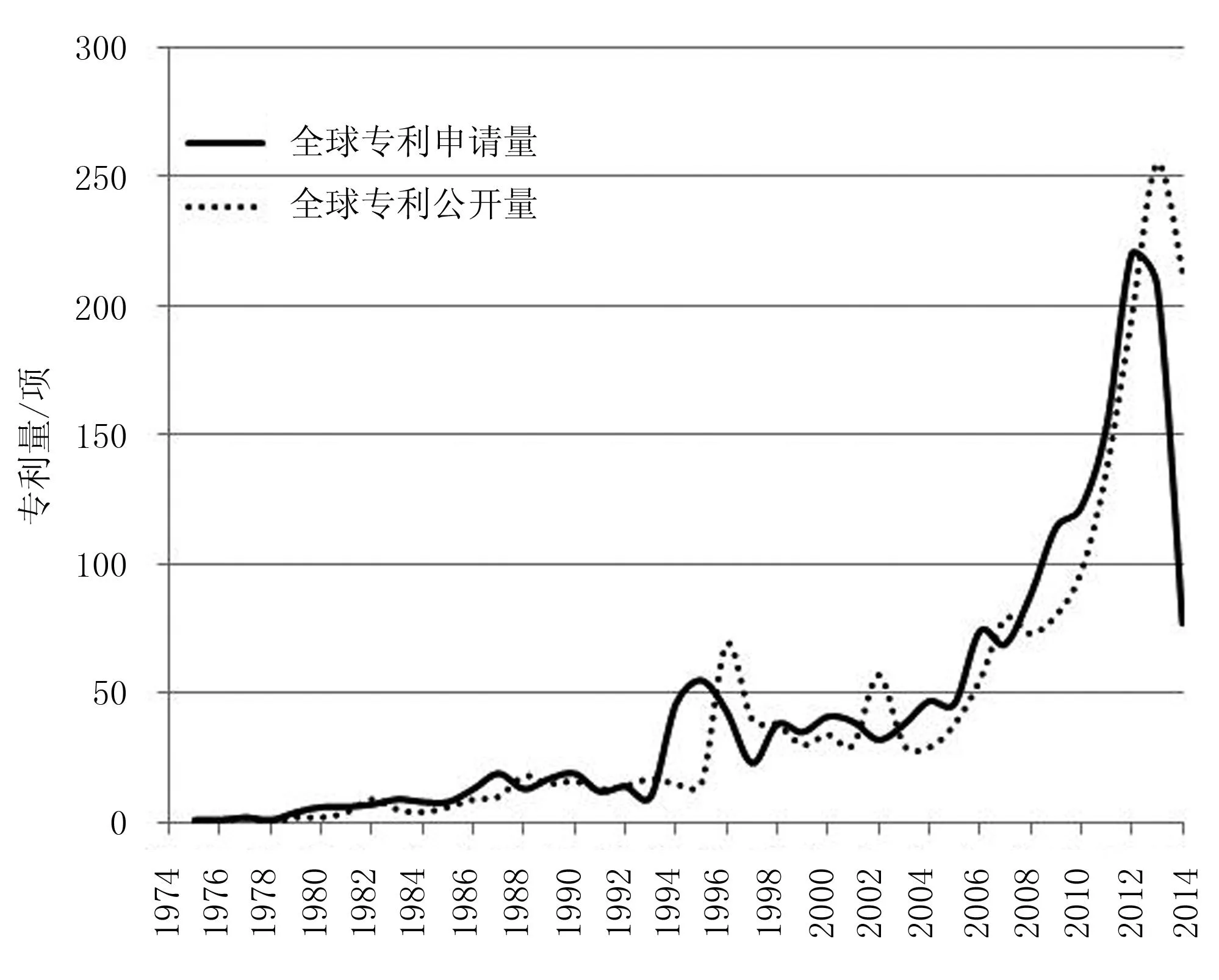
图1 年度专利走势图
2重点技术领域
2.1 重点研发技术
DII手工代码和国际专利分类号(IPC)包含了专利的技术信息,通过对农业机器人相关专利进行基于DII手工代码和IPC的统计分析,可以了解农业机器人技术的研发重点。
表1和表2分别列出了农业机器人技术的TOP20的手工代码和IPC代码,从中均可看出机械手(包括机械手的末端执行器)及其控制、自动导航及目标探测与定位是该技术领域的研发重点,同时也是关键技术。
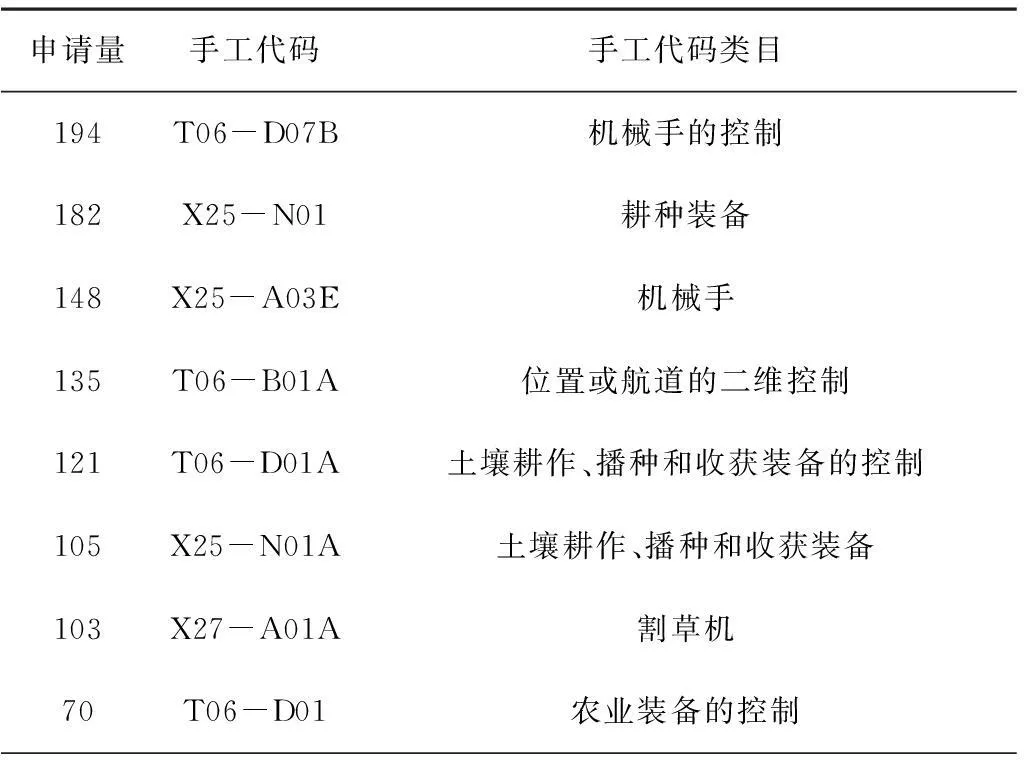
表1 农业机器人技术专利申请的TOP 20手工代码

续表1

表2 农业机器人技术专利申请的TOP 20 IPC代码
对主要技术领域进行年度走势分析,可以发现农业机器人技术领域各项关键技术的年度发展情况。如图2所示,农业机器人的自动导航技术于1981年开始有第1份相关申请(由加拿大DIFFRACTO公司申请),而专利申请量从1998年开始快速增长,并于2010年达到小高峰。而农业机器人的末端执行器技术于1982年开始有第1份相关申请(由匈牙利MEZOGAZDASAGI ELELM公司申请,关于水果采摘机器人的末端执行器),申请量于1994年达到一个小高峰,达到17项(其中10项由日本久保田申请,5项由日本洋马申请);随后专利量出现起伏,于2011年开始再次快速增长,2012年申请量达27项,2013年申请量(不完全数据)达37项,在2011年绝大多数相关专利由中国高校申请。农业机器人的目标探测与定位技术于1980年开始有第1份相关申请(由法国ENSERB ECOLE NAT公司申请),而直到2002年,每年的专利申请量不足10项;从2003年开始,专利申请量出现快速增长,从2003年的13项增长到2012年的53项。

图2 关键技术专利族年度分布
2.2 重点研发种类
如表3所示:农业机器人相关专利申请中,最热门的依次为收获机器人(包括收获、采摘和割草)、田间作业机器人、植保机器人、分级分选机器人和喷灌机器人,所占比例分别为40.7%、27.0%、12.1%、4.6%和3.5%。

表3 各类农业机器人专利族分布
图3展示了各类农业机器人上各种关键技术的研发情况。从图3中可以看出:目标探测与定位、末端执行器和自动导航这3种关键技术在收获机器人上的研发最为热门,其次是田间作业机器人;而对于植保机器人,3种关键技术中,目标探测与定位技术的研发最为热门,对于分级分选机器人,则是末端执行器的研发最为热门。

图3 各类农业机器人中关键技术的专利族分布
3专利区域分布
依据农业机器人技术1 779项德温特专利族分布来看,全球农业机器人技术专利主要来源国为中国、日本、美国、韩国和德国等。本节主要从全球专利分布、主要国家专利申请量年度分布、主要国家关键技术布局、主要国家全球专利布局等角度对全球农业机器人技术的区域竞争格局进行分析和研究。
3.1 国际技术研发格局
所谓专利优先权是指申请人在一个国家第1次提出申请后,可以在专利法规定的期限内就同一主题向其他国家申请保护,这一申请在某些方面被视为是在第1次申请的申请日提出的。通常而言,发明人会在本国就其发明创造第1次提出专利申请,所以优先权专利申请的地域分布可以反映国家的技术实力。
如图4所示,从农业机器人1 779项优先权专利的区域分布看,中国的专利申请量为656项,处于绝对的领先地位,占据产业技术所有优先权专利的37%;日本排名第2,占据产业技术所有优先权专利的18%,排名3~5位的分别是美国、韩国和德国;排名前5位的国家占了所有优先权专利的76%。
图5是TOP5优先权国的专利申请随年代的分布图。从图5中可以看出:日本起步相对较晚,直到1982年才出现第1份相关专利申请;但是,在该领域发展较快,申请量在1994 -1996年达到一个小高峰,专利申请量分别为39、45和29项。1996年后,虽然专利申请量出现回落,但是每年也保持5~20项的专利申请。美国在该领域则是起步最早,于1975年出现第1份专利申请,相关专利申请量从1999年开始出现快速增长,每年保持10~25项的专利申请。我国起步较晚,直到1990年才有第1份相关专利申请;但从2005年开始,在该领域的专利申请量开始出现高速增长,从2005年的8项猛增至2012年的151项和2013年的151项(2013年的数据由于专利公开时间的原因还不是完全数据),远远超出同时期其他国家关于农业机器人的专利申请,预计短期内还会继续增长,这说明我国近年来对于农业机器人技术的研发热情高涨,正在积极进行技术研发和储备,为产业化作准备。
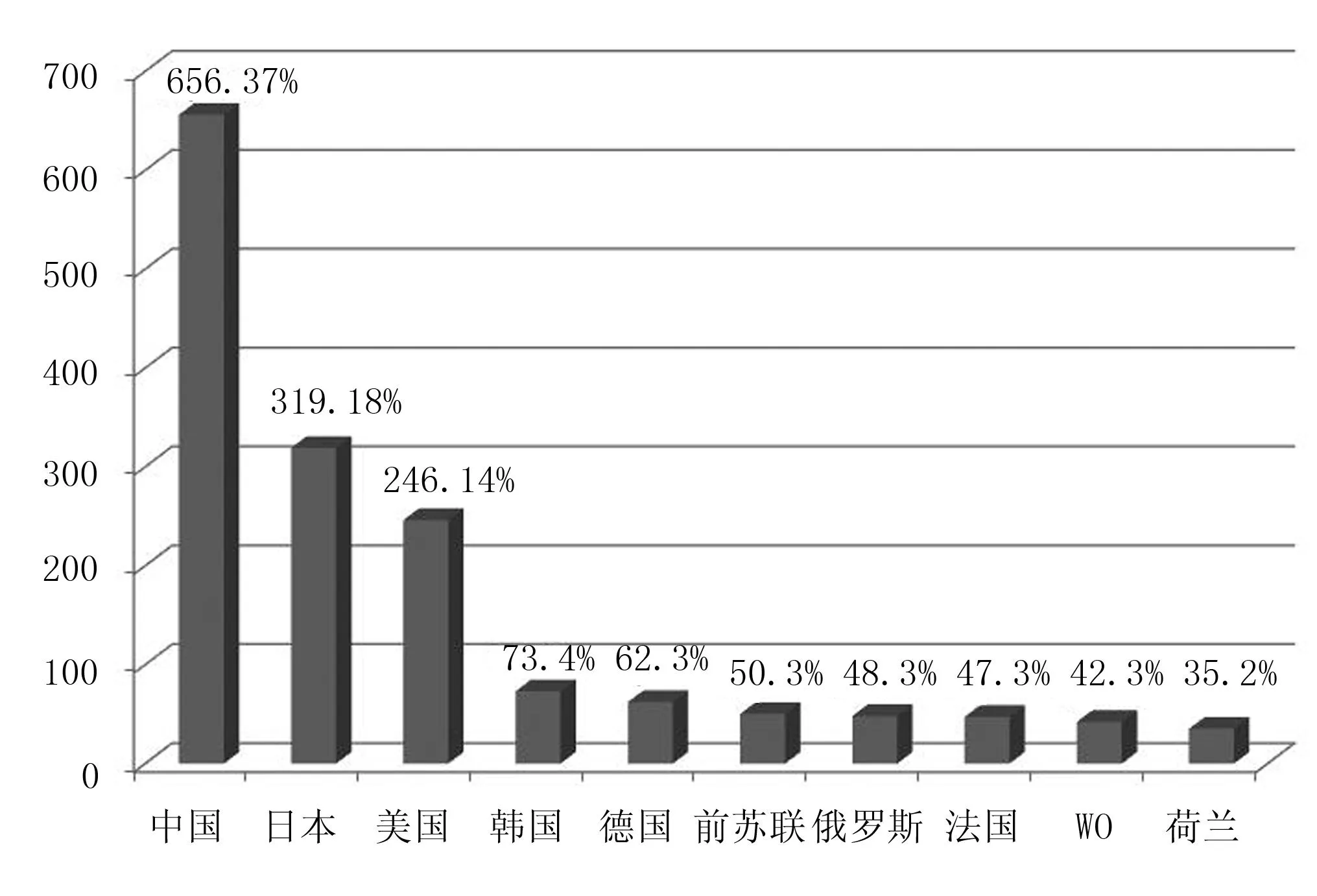
图4 优先权专利国际区域分布

图5 TOP 5优先权国专利族年度分布
由图6 TOP5优先权国技术领域布局图看,中国在农业机器人的目标探测与定位和末端执行器技术领域的专利申请量处于绝对的领先地位;日本紧随其后,在末端执行器技术领域具有较多专利申请;美国虽然专利申请量不多,但是在农业机器人的自动导航技术领域具有较大优势。

图6 TOP5优先权国技术领域布局图
如图7所示:TOP5优先权国对不同农业机器人的研发投入也略有不同。中国、美国、韩国和德国均最为关注收获机器人,其次为田间作业机器人、植保机器人等;日本则是最为关注田间作业机器人,其次是收获机器人、植保机器人等。
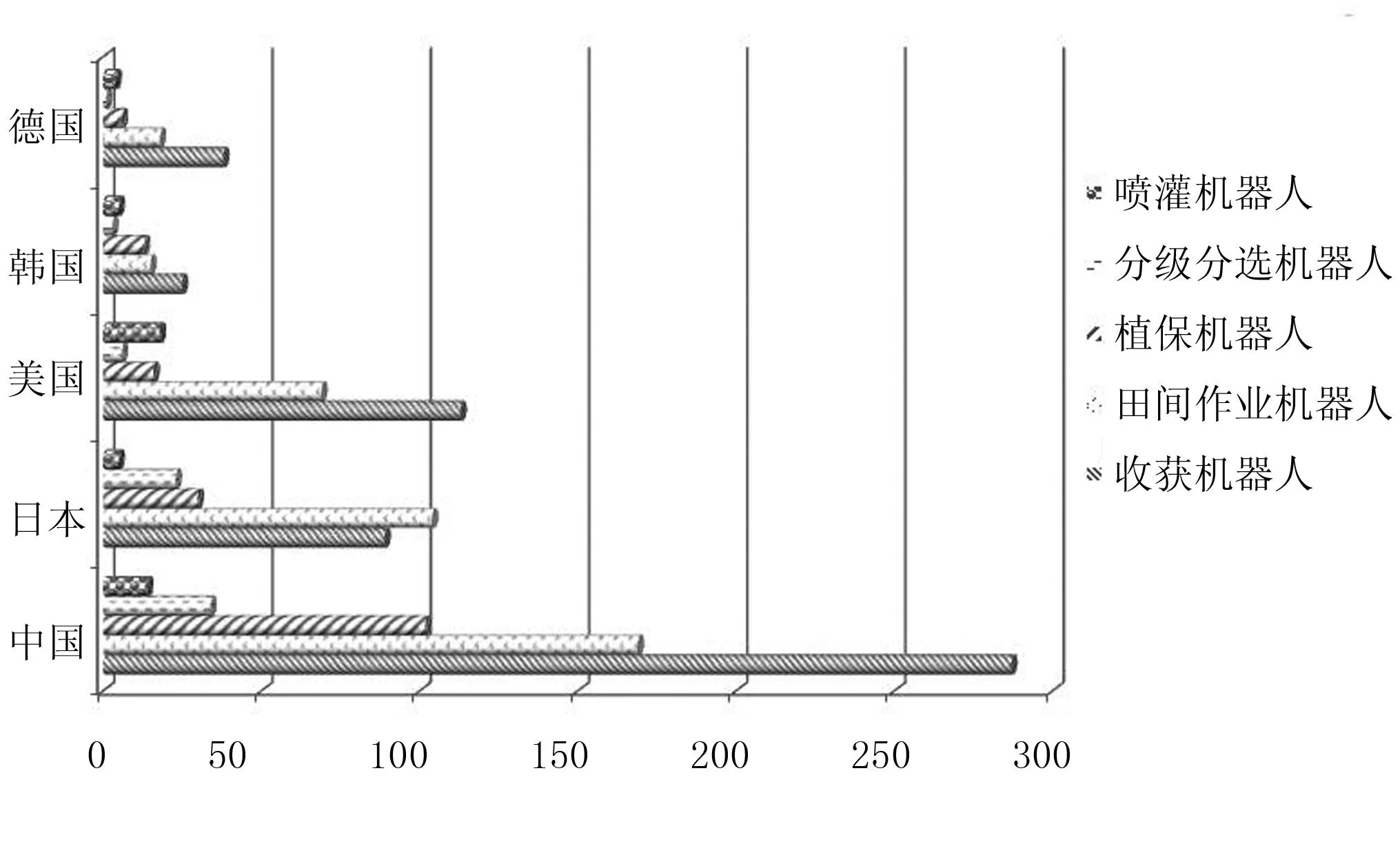
图7 TOP5优先权国农业机器人的布局图
3.2 主要专利国家全球专利布局
日本和美国作为农业机器人技术研发的强国,对世界市场的争夺也非常激烈,因此除了对本国进行专利保护外,为了在国外生产、销售农业机器人,必须在国外地区申请相关专利以求获得知识产权保护,同时该国同族专利的申请也可以反映出其市场战略。
由图8中可以了解到,日本除在本国申请外,同时重点在美国、欧洲、德国和中国等国家和地区进行布局,表明日本更为重视这些国家和地区的市场;美国虽然专利申请量少于日本,但是在本国外的布局力度强于日本,美国在欧洲、澳大利亚、德国、中国和日本部署有大量专利,这也说明美国虽然相关专利申请量不大,但是在农业机器人领域具有很强的技术实力。
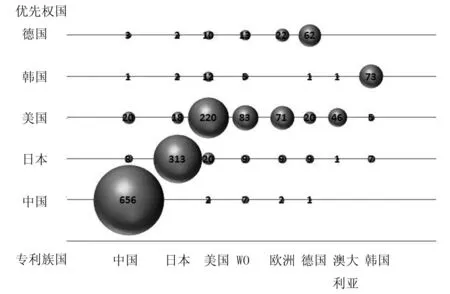
图8 主要专利国家全球专利布局
我国作为农业机器人领域专利申请量排名第一的大国,主要针对本国市场,只在国外零星地申请了几件专利,如在美国申请了2件专利,在欧洲申请了2件专利,在德国申请了1件专利,另外申请了7项PCT专利。这说明国内创新主体的专利保护意识还不够强,而且值得向国外申请专利的真正有价值的技术少之又少,侧面印证了我国在农业机器人领域核心技术的缺失。
3.3 主要国家专利质量分析
表4综合反映了TOP5优先权国家的专利质量。中国虽然优先权专利数量远多于日本和美国,但无论是总被引次数、平均被引次数、专利被引率还是PCT专利数量及美国专利数量等,都远低于美国。这说明我国虽然相关专利数量多,但是专利质量较低,研发水平还有待进一步提高。相比之下,美国则是专利质量最高的国家。
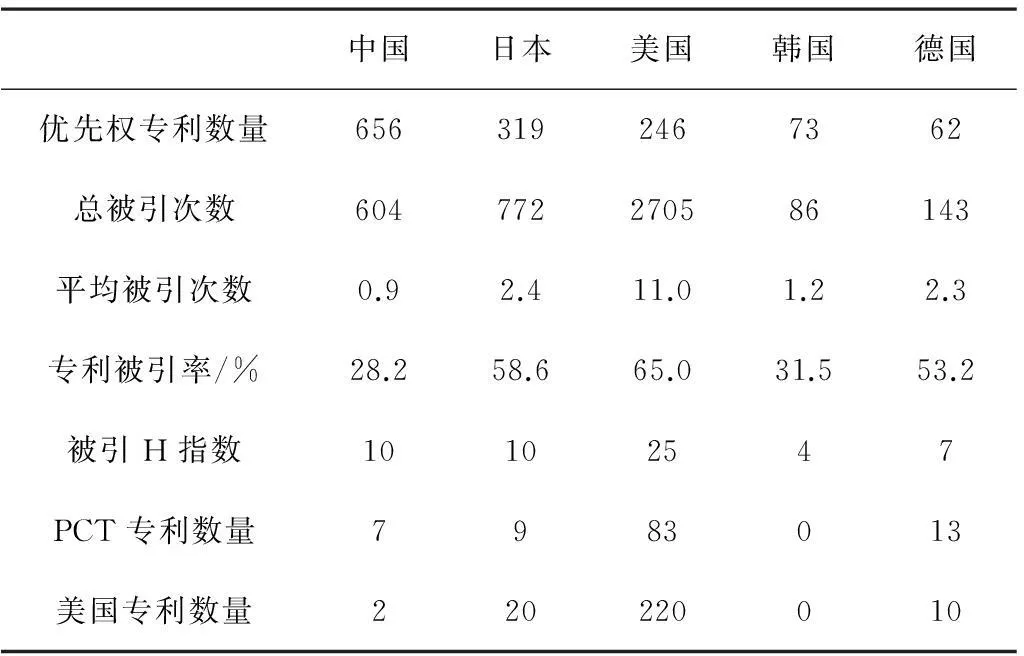
表4 主要国家专利指标
3.4 国内技术分布格局
如图9所示:中国专利申请的国外申请人主要来自美国、WO、日本、欧洲等, 这与这些国家和地区的农
业机器人技术研发能力相吻合。可见,农业机器人技术传统强国在抢占中国这一新兴市场时,均非常重视借助专利布局提高竞争力,实现市场和技术的双重垄断。
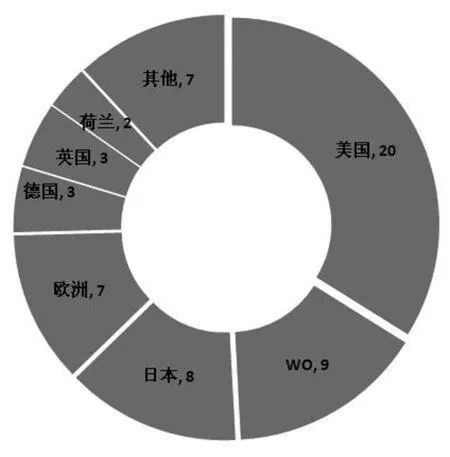
图9 中国专利中国外申请人的主要来源国
如图10所示:在国内,农业机器人技术方面,江苏、浙江、山东、北京和陕西等排在前列。江苏研发主力是江苏大学和江南大学等;浙江研发主力是浙江理工大学、浙江工业大学和浙江大学等。

图10 中国专利中国内申请人的地域分布
如图11所示:江苏在目标探测与定位技术领域和末端执行器存在较大优势,浙江则是在自动导航技术领域占据优势。
如图12所示:国内农业机器人种类方面,江苏比较关注收获机器人和分级分选机器人的研发;浙江更为关注田间作业机器人的研发;山东则更为关注植保机器人的研发。

图11 主要省市技术领域布局图
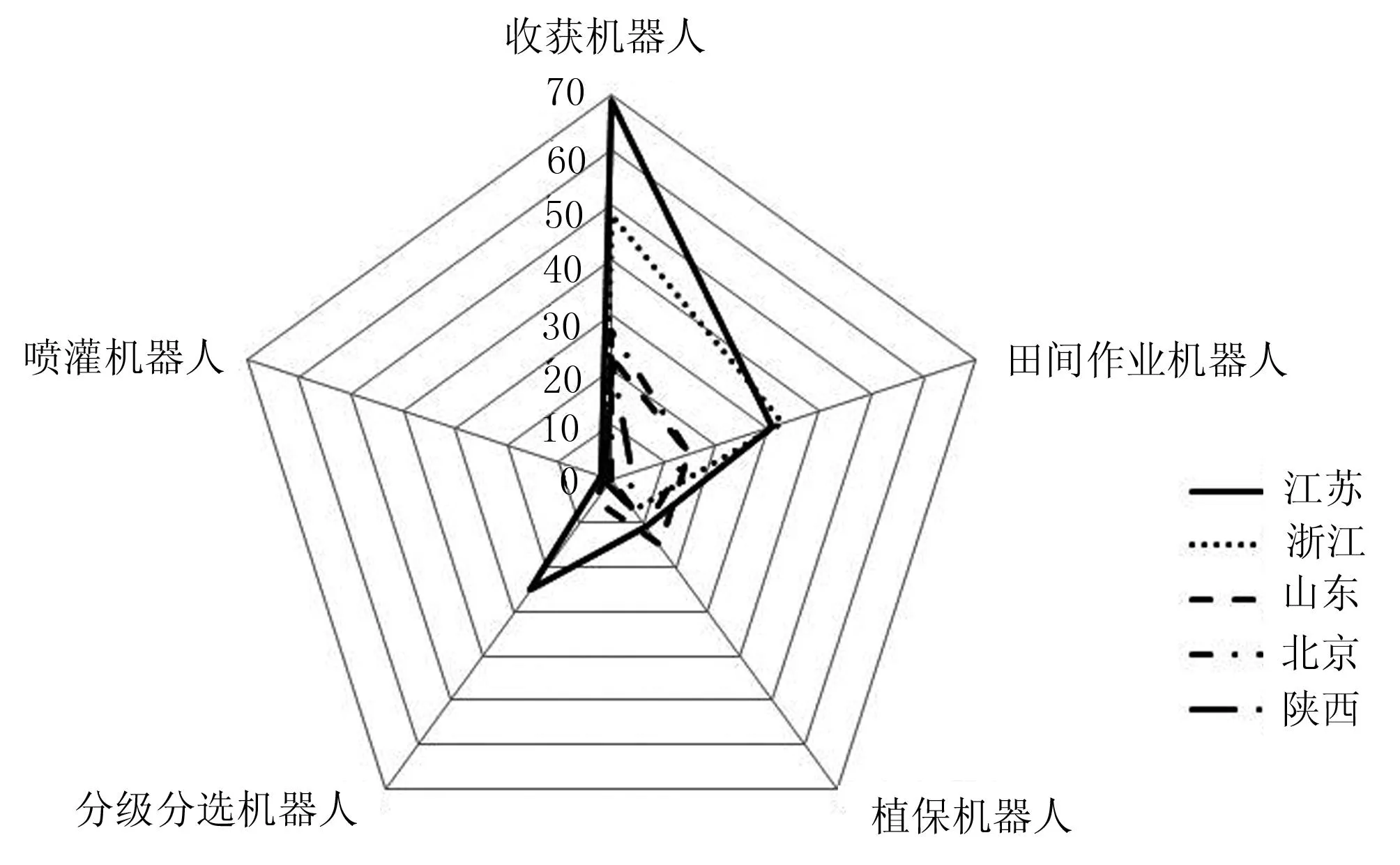
图12 主要省市农业机器人种类布局图
4专利竞争机构
本节主要从国际和国内角度研究农业机器人技术领域的竞争机构,包括国内外竞争机构排名、机构活跃度、创新能力研究、主要竞争机构技术特长,以及主要机构的合作情况等。
4.1 国际申请人排名
如图13所示:在全球专利申请排名前20位的申请人中,日本企业占了5席,分别是日本井关农机、久保田、洋马、三菱和生物系特定产业技术研究推进机构;其他国家的企业有美国的迪尔和凯斯纽荷兰、瑞典的胡斯华纳、德国的博世及以色列的F ROBOTICS。各企业申请量的排名在一定程度上反映了企业技术创新能力,但是也和企业专利布局和重视程度等因素密切相关。
如图14所示:选取农业机器人技术相关专利数量排名前5位的日本井关农机、中国江苏大学、瑞典胡斯华纳、日本久保田和美国迪尔分析其技术特长。结果显示:日本久保田在末端执行器技术领域具有优势;日本井关农机在目标探测与定位技术领域占据优势;瑞典胡斯华纳和美国迪尔则是在自动导航技术领域占据优势。
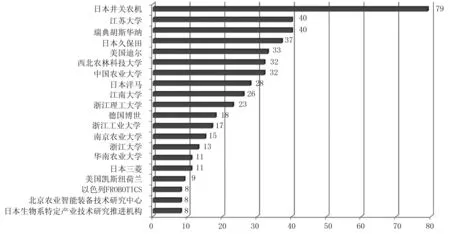
图13 主要专利申请人国际排名
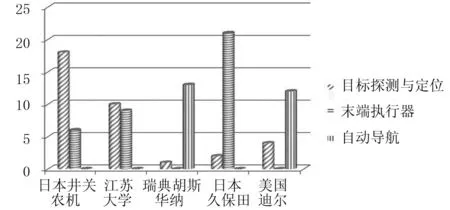
图14 全球重点企业技术特长
如图15所示:在农业机器人种类方面,瑞典胡斯华纳在收获机器人方面占据优势,该公司侧重研发收获机器人中的割草机器人;日本井关农机在田间作业机器人方面占据较大优势;日本久保田在分级分选机器人方面占据一定优势;美国迪尔则是在喷灌机器人方面占据优势。
在全球专利申请排名前20位的申请人中,我国申请人最多,占据了10席,按申请量多少排序分别为江苏大学、西北农林科技大学、中国农业大学、江南大学、浙江理工大学、浙江工业大学、南京农业大学、浙江大学、华南农业大学和北京农业智能装备技术研究中心。这说明我国在农业机器人技术领域具备一定的研究实力。但同时我们也能发现,在这些申请人中,没有中国企业的身影,说明在农业机器人领域我国仍然处于技术研发和积累阶段,是国内申请人目前研究的热点所在,技术水平还有待突破,未来存在很大的产业化发展空间。国内企业可以积极寻求与高等院校的技术合作,依托后者的研发实力加速技术产业化的进程。

图15 全球重点企业农业机器人种类布局
4.2 国内申请人排名
如图16所示:在所有715件中国专利中,中国申请人申请的专利是656件,占比91.7%,国外申请人申请的专利是59件,占比8.3%。在中国专利申请排名前20位的申请人中,国外申请人有瑞典胡斯华纳公司(第10位)、德国博世公司(第12位)和美国迪尔公司(第20位),说明这3家公司更为重视中国的市场,需要在中国生产或销售相关产品时对相关技术予以保护。除这3家公司外,其余17家均为国内申请人。在这17家国内申请人中,企业只有重庆友武科技有限公司,该公司申请的专利主题有采摘机械臂、采摘夹持器、采摘机器人底盘和采摘机器人视觉处理系统等,可以看出研发重点为收获机器人中的采摘机器人,其余16家均为高校院所。
对TOP5的国内申请人进行技术布局分析,如图17所示。由此可以发现:江南大学在末端执行器技术领域具有一定优势,主要研发分级分选机器人的末端执行器;中国农业大学和西北农林科技大学则是在目标探测与定位和自动导航技术领域具有一定优势。

图16 中国专利主要申请人排名
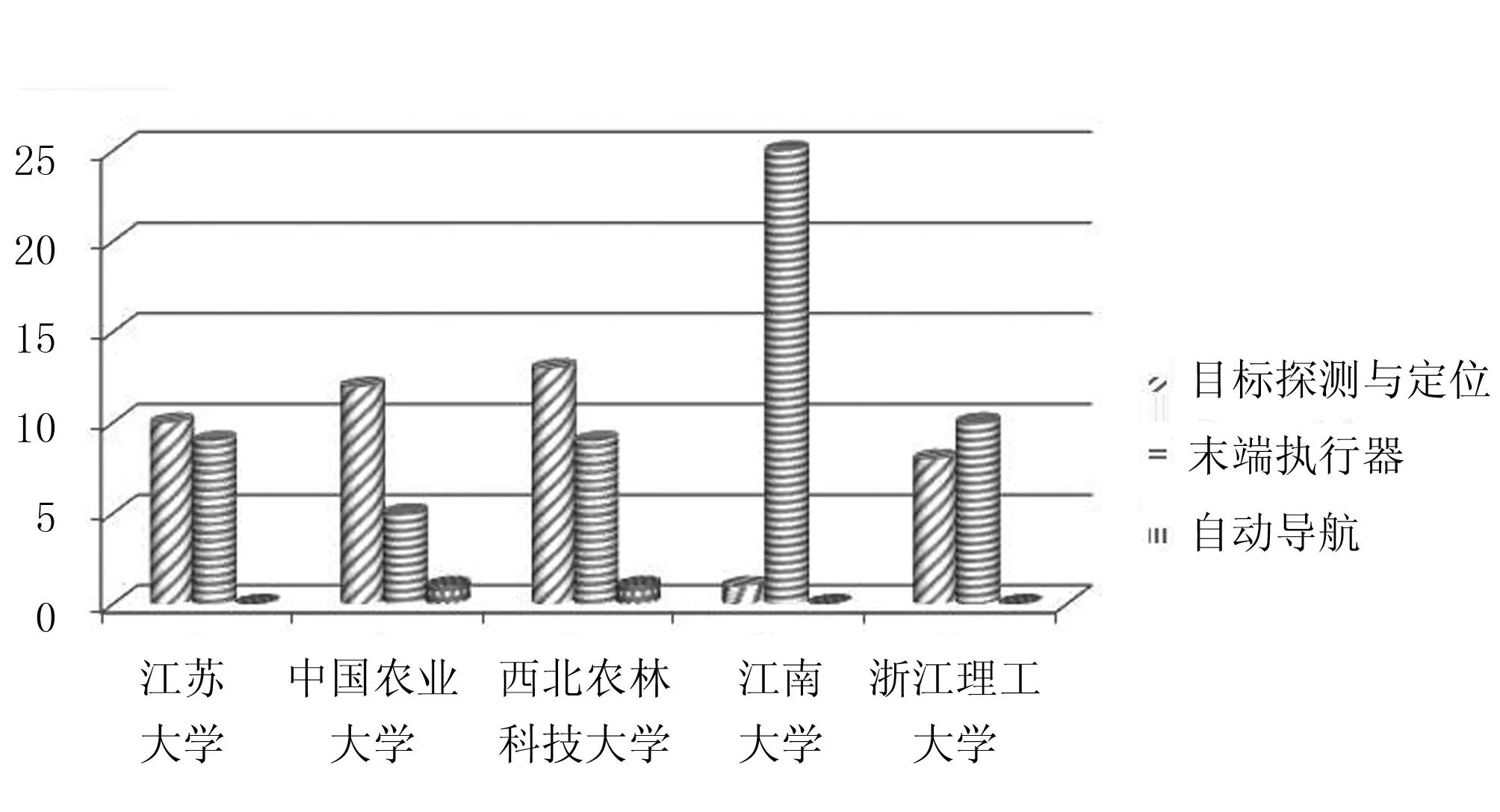
图17 中国专利主要申请人关键技术布局
从图18可以看出:江苏大学在收获机器人的研发上具有一定优势;浙江理工大学则是在田间作业机器人的研发上具有一定优势;中国农业大学在植保机器人的研发上具有一定优势;江南大学在分级分选机器人的研发上具有优势。
4.3 机构活跃度
在机构活跃度分析中,将拥有专利族量20项以上的机构定义为大型机构,将拥有专利族量6~20项的机构定义为中型机构,将拥有专利族量为1~5项的企业定义为小型机构。
在图19中,每块扇形用不同颜色加以区分,代表每一类机构申请专利族数量之和。由图19中可以看出:在国内外,大型机构专利族总和占到农业机器人专利族总量的19%;中型机构专利族总和占到专利族总量的11%;而小型机构专利族总量占70%。这表明,该领域的技术竞争非常激烈,仍处于发展期,没有出现技术垄断的巨头公司。
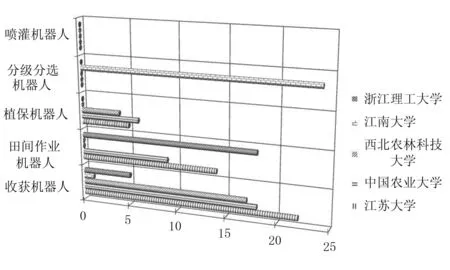
图18 中国专利主要申请人农业机器人种类布局

图19 基于机构活跃度的专利族数量分布图
5技术引证
通过技术引证分析,可以发现专利被其他申请人的引用情况,也可以从中寻求许可机会,追踪技术发展及识别专利权人的专利保护策略。
从表5可以看出:绝大多数高引专利还是来自美国企业,如美国凯斯纽荷兰、天宝导航、迪尔和Vision Robotics等,日本则有本田公司,说明这些公司的专利有着很强的基础性,专利受到关注更多,研究能力很高。
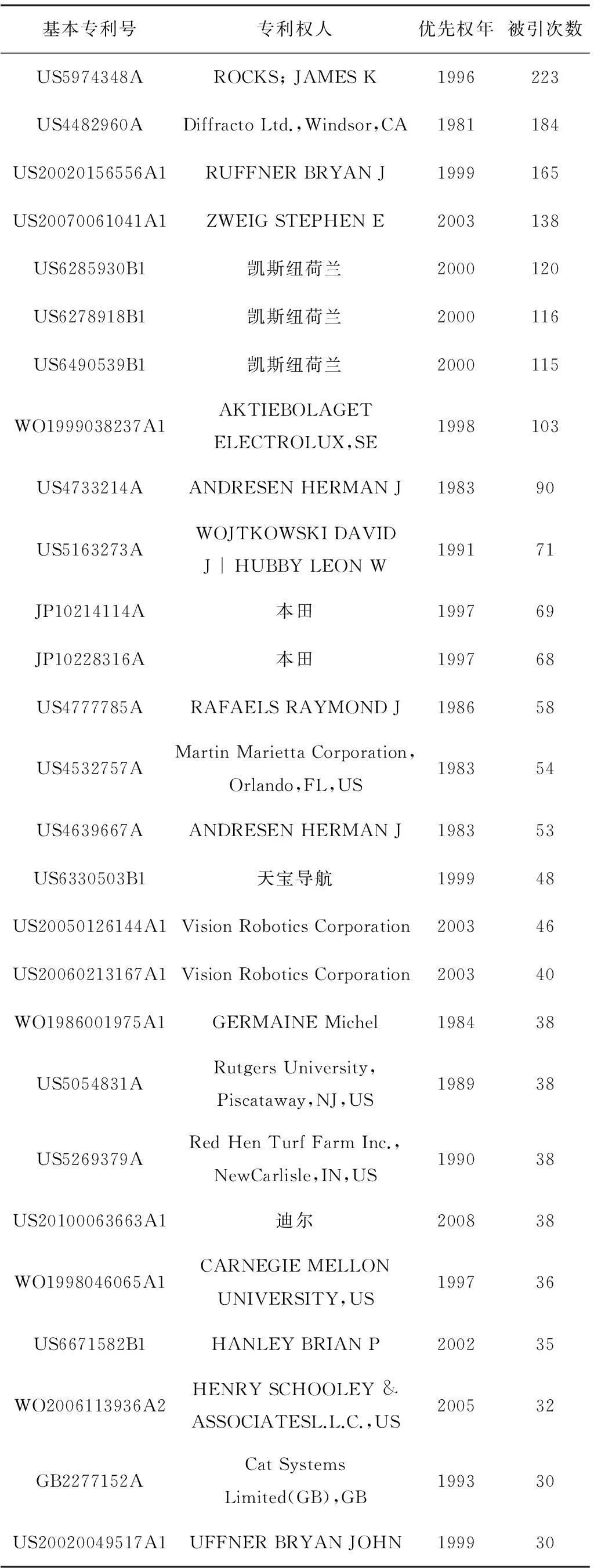
表5 农业机器人技术领域高引专利列表
6结论
从以上分析结果可以看出:农业机器人技术正处于发展期,目前国际上技术研发热情很高,短期发展前景毋庸置疑。机械手的末端执行器、自动导航及目标探测与定位是该领域的重点研发技术,而收获机器人、田间作业机器人、植保机器人是该领域的重点研发种类。该领域绝大多数高引专利来自美国企业,如美国凯斯纽荷兰、天宝导航、迪尔和Vision Robotics等,日本则有本田公司,说明这些公司的专利有着很强的基础性,专利受到关注更多,研究能力很高。
我国虽起步较晚,但近年来在该领域的专利申请量出现高速增长,远远超出同时期其他国家关于农业机器人的专利申请。这说明我国近年来对于农业机器人技术的研发热情高涨,正在积极进行技术研发和储备,为产业化作准备。
但是,也应该看到,中国虽然该领域优先权专利数量远多于日本和美国,但无论是总被引次数、平均被引次数、专利被引率还是PCT专利数量及美国专利数量等,都远低于美国,说明我国虽然相关专利数量多,但是专利质量较低,研发水平还有待进一步提高。
我国要想进一步发展农业机器人技术,需要从以下3个层次进行推进:
1)政府。大力实施知识产权战略,提高知识产权的创造、运用、管理和保护能力,严厉打击侵权行为,在社会层面上为农业机器人专利的创造和运用提供有力的环境和制度保证;完善产学研合作机制,有效整合企业与研究机构的力量,以市场化和实际运用为导向;引导共性科研平台对农业机器人的投入,设立平台专项运行经费,重点加强的末端执行器、自动导航及目标探测与定位等技术的研究开发;可在江苏、浙江、山东等相关专利较多的省份,利用当地的科研成果优势,构建农业机器人的产业集聚区,实现资源集约利用,提高整体效益。
2)企业。对于农业机器人技术领域,重点研发目标探测与定位技术、末端执行器和自动导航技术,突破路径规划、枝叶遮挡/果实重叠/逆光/扰动等条件下的视觉检测、夜间图像降噪、末端执行器的通用型等技术难点;重点关注日本井关农机、久保田、洋马、三菱、美国迪尔、凯斯纽荷兰、瑞典胡斯华纳、德国博世、以色列F ROBOTICS等机构的相关专利申请;加强与江苏大学、中国农业大学、西北农林科技大学、江南大学、浙江理工大学等高校的产学研合作;在下一步的产品研发、生产和销售的过程中,可以在国外企业的重要专利(如表6所列出的高引专利)的基础上进行研发。
3)产业园区。着重引进旨在研发农业机器人的企业,并给予倾斜性税率补偿;着重引进生产农业机器人配套零部件的企业;引导企业在产业园区内建立农业机器人技术研发中心。
参考文献:
[1]李谦,蔡晓华.机器视觉在除草机器人中的应用[J]. 农机化研究,2014,36(7):204-206,231.
[2]刘立强,蔡晓华,吴泽全.基于OpenCV的除草机器人图像处理技术[J].农机化研究,2013,35(12): 162-165.
[3]李良,张文爱,冯青春,等.温室轨道施药机器人系统设计[J].农机化研究,2016,38(1):109-112,118.
[4]李玉林,崔振德,张园,等.中国农业机器人的应用及发展现状[J].热带农业工程,2014,38(4):30-33.
[5]姬江涛,郑治华,杜蒙蒙,等.农业机器人的发展现状及趋势[J].农机化研究,2014,36(2):1-4,9.
[6]苏媛,杨磊,宋欣,等.智能移动苹果采摘机器人的设计及试验[J].农机化研究,2016,38(1):159-162.
[7]丁巍,戈振扬,卢衷正.GPS组合模糊控制的农田机器人导航系统设计[J].农机化研究,2015,37(9): 109-112.
[8]赵洲,朱新华,何颖,等.机器人在温室中的应用研究[J].农机化研究,2015,37(1):238-241,268.
[9]王宝梁,薛金林.开放式系统农业机器人技术概述[J].农机化研究,2013,35(6):8-12.
[10]许国瑞.农业机器人视觉导航系统研究[D].哈尔滨:东北农业大学,2013.
Abstract ID:1003-188X(2016)09-0001-EA
Studies on the Development Status of Agricultural Robot Related Technologies Based on Patent Map
Shen Kai, Lin Zhijian, Ying Xiangwei, Qiu Qiufei, Wu Qiaoling, Zhao Yunfei, Wu Yeqing
(Institute of Scientific and Technical Information of Zhejiang Province, Hangzhou 310006, China)
Abstract:Agricultural robot is an important potential development direction for agricultural machinery industry, which can improve the core competitiveness of relevant companies, drive technological innovations and promote the increase of agricultural production efficiency. In this article, based on the patent map of agricultural robot related technologies, the development status is investigated from five aspects, including development trend, key technology fields, regional distribution, rival agencies and highly cited patents, to provide intelligence support for further development of agricultural robot industry and technologies by related government, companies, universities and research institutes. Research results indicate that agricultural robot related technologies began a rapid development around 1995 and up to now. End effector of manipulator, automatic guidance and target detection & location are key technologies of R&D. Harvesting robot, field operation robot and crop protection robot are key species of R&D. China has great R&D enthusiasm towards agricultural robot related technologies in recent years, and has applied a large number of patents. However, compared to USA and Japan, the patent quality of China is a bit lower and China lacks core patents. Thus, the technological level of China in agricultural robot field needs further improvement.Moreover, countermeasures and suggestions are presented for the development of agricultural robot in China from three levels, including government, companies and industrial parks.
Key words:agricultural robot; patent map; competitive intelligence
中图分类号:S24
文献标识码:A
文章编号:1003-188X(2016)09-0001-09
作者简介:谌凯(1984-),男,武汉人,助理研究员,博士,(E-mail)shenkai@zjinfo.gov.cn。通讯作者:应向伟(1961-),男,浙江永康人,高级记者,(E-mail)yxw@zjinfo.gov.cn。
基金项目:浙江省创新团队建设与人才培养项目(2013F20009)
收稿日期:2015-08-26
