汽车主动安全技术现状与发展
2016-03-21王毅山东科技大学交通学院山东青岛266590
王毅(山东科技大学 交通学院,山东 青岛 266590)
汽车主动安全技术现状与发展
王毅
(山东科技大学交通学院,山东青岛266590)
摘要:汽车主动安全技术能够在一定程度上预防和避免交通事故的发生,近年来汽车主动安全技术得到了巨大的发展,许多主流的主动安全技术例如ABS,ESP,ACC,LWDS和TPMS等在新型汽车上得到了广泛应用.本文分析了汽车主动安全技术的发展现状,介绍了上述主流主动安全技术并对未来的汽车主动安全技术发展趋势做出了详细阐释.
关键词:汽车;主动安全;主流技术;现状;发展
1 前言
汽车产业现在作为一个国家的支柱产业,在创造大量就业岗位并极大地拉动相关产业的发展同时,也带来了许多让人们担心的问题.交通事故,环境污染等问题在随着汽车产业的进一步发展逐渐暴露出来.尤其是交通事故问题,给人类社会带来了极大的生命和财产损失.据联合国卫生组织报告,目前全球有每年超过130万人死于各类交通事故.在心脑血管疾病、呼吸系统疾病和恶性肿瘤之后,交通事故已经成了人类生命安全的第四大威胁.另外每年因交通事故带来的经济损失高达上千亿美元.由此可见道路交通事故对社会的危害不容小觑.在此背景下,汽车安全技术应运而生,它因能保障乘坐人员在发生事故时的安全和尽量避免事故的发生而越来越受到社会的重视.目前越来越多先进技术被不断的应用到汽车安全技术领域,而汽车安全性则能成为了消费者评价汽车产品的又一重要标准.
2 汽车主动安全技术发展现状
1886年第一部汽车问世,几年便后出现了交通事故导致人员伤亡.自那以后人们便意识到汽车安全性能的重要性.在随后的一百多年里,汽车的发展突飞猛进,汽车安全技术也相应的不断发展和完善.时至今日,汽车安全技术已经已经走向电子化,智能化,集成化的发展道路.汽车安全技术共分为两类:主动安全技术和被动安全技术.(图1)

图1 汽车安全技术分类
自从上世纪80年代汽车防抱死制动系统(ABS)发明后,其它的几种主动安全技术类似汽车电子稳定系统(ESP),车道偏离预警系统(LDWS)等也随之出现.人们的注意力从怎样在交通事故发生后尽可能减少损失逐渐转移到了怎样尽可能避免交通事故的发生从而力求从源头上解决问题.
所谓汽车主动安全技术,就是为预防汽车发生事故,避免人员受到伤害而采取的安全技术,称为主动安全技术,如防抱死制动系统(ABS),电子制动力分配系统(EBD),车道偏离预警系统(LDWS)等都是主动安全技术.它们的特点是提高汽车的行驶稳定性,尽力防止车祸发生.其它像自适应巡航控制系统(ACC)、汽车电子稳定系统(ESP)、胎压监测系统(TPMS)等也是主动安全技术.对于像安全气囊,安全带这样的被动安全技术只能在交通事故发生以后对乘坐人员进行一定程度保护而类似防抱死制动系统(ABS),车道偏离预警系统(LDWS)等主动安全技术则可在很大程度上避免交通事故的发生.因此主动安全技术得到了人们更多的关注,越来越多的主动安全技术在避免交通事故的发生上起到了巨大的作用.目前在市场上的主流主动安全技术主要有:防抱死制动系统(ABS),汽车电子稳定系统(ESP),自适应巡航控制系统(ACC)和车道偏离预警系统(LWDS)以及胎压检测系统(TPMS)等.下文将对其进行一一介绍.
3 主流汽车安全技术介绍
3.1防抱死制动系统(ABS)
汽车防抱死制动系统(Anti-lock Braking System,简称ABS)是汽车上应用最广泛的汽车主动安全技术,目前绝大部分的汽车都装有此系统.此系统极大地提高了汽车在紧急制动时的安全性,防止汽车因为紧急制动时车轮出现抱死现象而产生侧滑,甩尾从而导致事故的发生.防抱死制动系统因其在紧急制动时对汽车操控性能的稳定而挽救了无数生命.(ABS组成见图2)
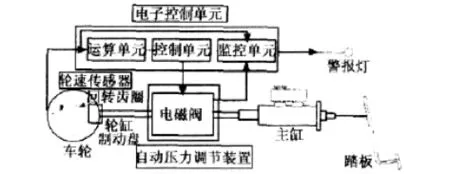
图2 ABS的组成
制动器制动力大于车轮和路面的附着力是汽车发生制动滑移的主要原因.要想取得最佳制动效果,汽车车轮的滑移率最后控制在10%~20%.防抱死制动系统是在普通的汽车制动系统上加装了电子控制单元﹑轮速传感器﹑自动压力调节装置等组成的.其工作原理为:制动轮缸的制动压力由电子控制单元自动控制,从而使得车轮在制动时不出现抱死现象,并且滑移率控制在合适的范围(10%~20%).ABS总共有四个工作过程:(1)常规制动过程:驾驶员根据路况做出刹车反应,将刹车踏板踩下.动力通过主缸经液压传动到刹车片对制动盘进行挤压从而实现常规制动;(2)保压制动过程:汽车车轮由于制动压力的不断升高和速度的不断下降而产生了部分滑移.此时电子控制单元控制自动压力调节装置关闭主缸与轮缸制动器之间的液压通道.轮缸制动器得不到油液的补充,于是维持在一个稳定的压力状态.刹车片对制动盘的制动力也维持稳定;(3)降压制动过程:车轮转速在稳定的制动压力下不断下降,车轮的滑移率不断上升并超过了最佳滑移率范围(10%~20%).此时ABS电控单元会向自动压力调节装置下达指令,使其减少制动油压从而使车轮的转速由下降变为上升,车轮滑移现象消失;(4)增压制动过程:随着车轮的转速不断增加,汽车的滑移率将低于10%~20%.此时ABS电子控制单元将会通过自动压力调节装置调节油压的大小.主缸与制动轮缸之间的油压增大,刹车片对制动盘的挤压力增大,车轮转速再一次下降.综上所述,汽车防抱死制动系统的工作原理就是电子控制单元判断车轮是否处于抱死状态,然后通过对自动压力调节装置的控制来控制刹车油压的大小使车轮处于抱死—松开—抱死—松开的循环直至制动结束.在整个制动过程中,车轮始终处于半抱死半滚动状态,滑移率被控制在10%~20%左右,车轮与地面之间附着力充足,从而避免了紧急制动造成的侧滑,甩尾,翻车等现象,极大地提高了制动的操控性和安全性.
3.2汽车电子稳定系统(ESP)
汽车电子稳定系统(Electronic Stability Program简称ESP)最早由德国的两大工业巨头奔驰公司和博世公司共同研发.它是一个综合的,复杂的集成系统,综合了牵引力控制系统(TPS)﹑防抱死制动系统(ABS)以及电子制动力分配系统(TCS)等系统的功能.其主要组成部分有控制单元﹑液压调节器﹑电控油门装置以及轮速传感器等.(ESP组成见图3)汽车电子稳定系统是一个可以自动识别汽车不正常行驶状态并据此做出自动调整,使汽车在短时间内恢复正常行驶状态的电子系统.它本质上是通过控制汽车行驶的牵引力来实现相关功能的,主动轮以及从动轮都受此系统的控制进行选择性制动从而保证了汽车行驶轨迹的正常.和仅装有防抱死制动系统(ABS)的汽车不同,ESP系统可以主动对汽车轨迹进行调整.例如,当汽车转弯过急时一侧会产生甩尾现象,极大地影响到汽车的行驶安全性.这时ESP系统就会迅速检测到甩尾并作出及时的反应,将这一侧的前轮制动使车轮恢复良好的附着性.
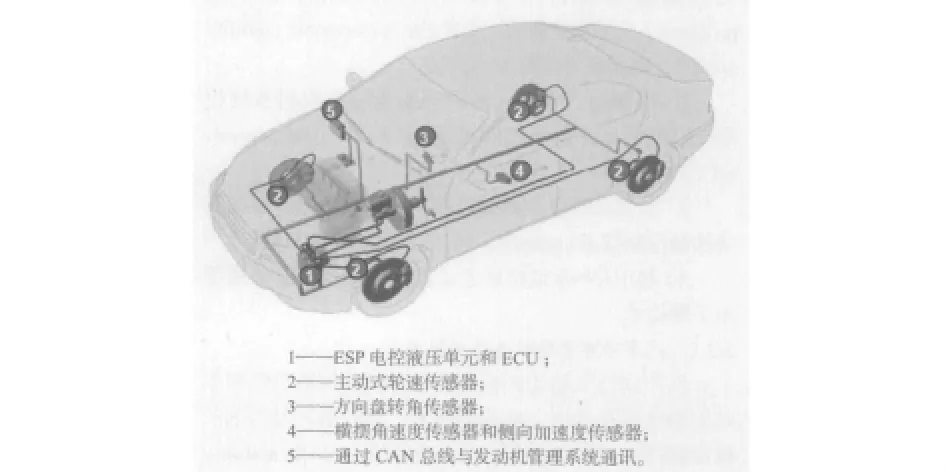
图3 ESP的组成
ESP系统主要有三个特点:(1)实时监控.ESP系统在车辆的行驶过程中一直保持工作状态,对车辆行驶进行实时监控,不断地发出控制调整指令.(2)主动干预.ESP系统通过控制对四个车轮的制动力来对驾驶员的驾驶进行主动干预,修正转向过度或转向不足.(3)事先提醒.当驾驶员操作不当导致汽车行驶出现状况时,ESP系统会向驾驶员发出警告.ESP系统的这三个特点使驾驶的安全性大大提升,即使在复杂的路况下,ESP也能精确控制车轮的制动,使汽车保持一个较为稳定的行驶状态.根据调查统计显示,安装ESP系统可以减少超过百分之二十的单车碰撞事故和降低至少百分之六十的侧翻事故.美国交通部的报告显示,安装ESP系统将每年减少近一万例的交通伤亡事故.因此一些发达国家已经出台规定限制在特定吨位下的汽车必须强制安装ESP系统.同时安装有ESP系统的汽车可以在汽车安全碰撞等级中获得更高的评分,从而获得消费者更多青睐.
目前ESP系统的技术主要被国外的几家实力雄厚的零部件企业所垄断.中国国内电子安全技术尚处于落后状态,但一些高校和企业已经开始起步并实现了一部分产权自主化而且将其运用到了自主产品中.汽车电子稳定系统堪称汽车主动安全技术领域里“里程碑式”的突破,其重要性不言而喻,不仅仅是对汽车行驶的安全性,对汽车市场的开拓和发展也有着极大的影响.因此中国的ESP汽车电子稳定系统技术还需要进一步的发展和突破.
3.3车道偏离预警系统
车道偏离预警系统(Lane Departure Warning System,简称LDWS)可以通过对驾驶员发出预警信号而避免或减少因偏离预定驾驶轨道而发生的交通事故.LDWS是一种智能的检测和提醒系统.在汽车正常行驶过程中,它会通过摄像头对路面标识线进行信息采集,然后进行图像处理计算出当前的行驶轨迹.当汽车不提供主动偏离预定轨道的信息(例如驾驶员打转向灯)却偏离原来行驶轨道时,车道偏离预警系统就会在零点几秒内做出反应,对驾驶员进行报警,提醒驾驶员已偏离当前行驶轨道.由此可见,车道偏离预警系统对因疲劳驾驶或其他原因引起的注意力分散行为有着良好的监控和纠正作用.在长途驾驶中,疲劳成为了干扰安全驾驶的主要因素,据调查,超过百分之二十的驾驶员一个月内至少在方向盘上睡着过一次,超过百分之五十的长途卡车驾驶员在夜晚的驾驶中打瞌睡.LDWS虽然不能从源头上解决疲劳驾驶的问题,但它可以及时提醒,实时监控,很大程度上避免了因为疲劳驾驶引起的交通事故.
目前市场上的车道偏离预警系统都是以视觉检测技术为基础的.根据摄像头的不同安装位置,分为测试系统和前视系统.但它们的基本组成相似,都由道路和车辆状态感知,车道偏离评价算法和信号显示界面三个基本模块组成(见图4).
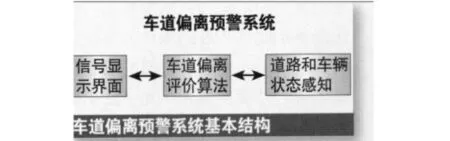
图4 车道偏离预警系统的基本结构
3.4自适应巡航控制系统
自适应巡航控制系统(Adaptive Cruise Control简称ACC)是一种新型的智能巡航系统,和普通的巡航系统只具有单一的车速控制功能不同,ACC系统在此基础上开发出了和前车保持一定车距的智能功能.因此ACC在缓解疲劳驾驶,提升跟随巡航安全性方面有着巨大作用.自适应巡航系统的简单工作原理如下(ACC工作原理图见图5):当汽车启动自适应巡航控制系统,并且车速达到了ACC系统工作所要求的最低车速(一般为25km/h)时,汽车前部雷达不断对前方路况进行扫描,同时轮速传感器不断对车速信号采集并将其发送到ECU控制单元.当雷达扫描到与前车距离过近时,ECU控制单元马上对ABS防抱死制动系统和发动机控制系统发出指令,使汽车进行一定程度的制动并控制发动机的功率输出,以达到与前车始终保持适度的安全距离.当雷达扫描不到前车信号时,汽车又会恢复巡航速度继续行驶.
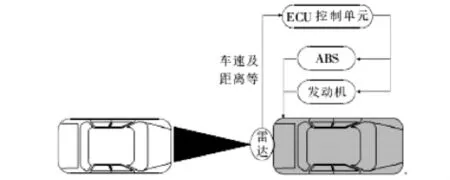
图5 自适应巡航控制系统工作原理
3.5胎压监测系统(TPMS)
胎压监测系统(Tire Pressure Monitoring System简称TPMS)是一种对汽车轮胎的气压进行智能监测的系统.它通过对轮胎气压的直接或间接监测对轮胎高压,低压,高温或者漏气现象进行及时报警,预防因为轮胎气压问题所导致的失控,翻车等交通事故.根据监测方式不同,胎压监测系统可分为直接式和间接式:直接式通过胎压传感器进行工作;间接式通过监测轮胎的转速差进行工作.
4 汽车主动安全技术的发展趋势
汽车工业在不断地随着技术的进步而发展,作为保障行车安全的技术基础―汽车安全技术也在不断地更新换代.主动安全技术作为更高端,更有效的安全技术吸引着大批公司进行研究和开发,随着电子技术,网络技术,集成技术,软件技术的发展,汽车主动安全技术将会主要呈现出三个发展趋势:(1)电子化,汽车主动安全技术本来就依靠各种电路实现信息的获取与传递,未来的汽车主动安全技术将会更加仰仗电子技术的发展,电子信息的快速传递和便于处理的特点将会使汽车主动安全技术更加迅速化,精确化. (2)智能化,归根结底,汽车主动安全技术是为了人类服务.因此,为了操作使用更加方便,更加符合人机关系,未来的汽车主动安全技术必将会是更加的智能,减少了更多人类不必要的操作,使主动安全技术更加自动化,便利化.(3)集成化,汽车主动安全技术包括许多分类,各个分类之间有着密切的联系,将这些主动安全技术集成在一起,互相合作,实现信息的交互式信息传递,可以实现更好的安全效果,使主动安全技术更加一体化,高效化.
随着现代科学技术的突飞猛进,汽车主动安全技术将会插上腾飞的翅膀,越来越多的先进技术会应用到此领域,汽车主动安全技术必将会提供更好的安全保障.
参考文献:
〔1〕杨秀芳,张新,常桂秀,楼媛媛.汽车主动安全技术的发展现状及趋势[J].重庆工学院学报(自然科学版),2008(04): 15-17+30.
〔2〕彭金栓,徐磊,邵毅明.汽车主动安全技术现状及发展趋势[J].公路与汽运,2014(01):1-4.
〔3〕吕光辉,张忍,房宏威,宋真玉.汽车主动安全技术-过去与未来[J].轻型汽车技术,2012(Z4):3-6.
〔4〕宋健,王伟玮,李亮,于良耀.汽车安全技术的研究现状和展望[J].汽车安全与节能学报,2010(02):98-106.
〔5〕郭鸿瑞.汽车主动安全新技术及其发展趋势[J].汽车实用技术,2010(05):10-13.
〔6〕赵福全,吴成明,潘之杰,刘卫国,刘巍.中国汽车安全技术的现状与展望[J].汽车安全与节能学报,2011(02):111-121.
〔7〕胡元,程珩.当代汽车安全技术及其未来发展趋势[J].机械管理开发,2007(02):44-46+48.
〔8〕仝光,李虎,郑文成.车道偏离预警系统研究概述[J].汽车与配件,2009(18):26-27.
收稿日期:2015-11-05
中图分类号:U463.99
文献标识码:A
文章编号:1673-260X(2016)01-0068-03