导弹靶弹弹道机动变轨通用控制指令设计
2016-03-16毕开波张翼飞张传刚
毕开波,张翼飞,张传刚
(海军大连舰艇学院,辽宁 大连 116018)
导弹靶弹弹道机动变轨通用控制指令设计
毕开波,张翼飞,张传刚
(海军大连舰艇学院,辽宁 大连 116018)
导弹进行一定强度的机动飞行,就能够提高突防能力,因而,在军事训练中需要具有末端机动变轨能力的靶弹。针对靶弹机动变轨弹道的设计问题,提出变轨通用控制指令设计形式,利用此设计可使靶弹位移与过载指令控制信号协调配合,控制靶弹实现跃升机动、蛇行机动、摆式机动和螺旋机动等变轨形式。通过仿真证明,此设计的变轨弹道通用控制指令,可以满足靶弹跃升机动、蛇行机动、摆式机动和螺旋机动等各种变轨形式的弹道设计要求。
导弹靶弹;机动变轨;过载控制
0 引言
目前,很多军事发达国家已经装备了具有末端机动能力的反舰导弹[1-4]。例如,美国的“捕鲸叉”反舰导弹具有末端跃升机动,俄罗斯的“白蛉”反舰导弹具有末端蛇行机动[5],另外某些弹道导弹再入大气层时具有螺旋机动弹道或摆式机动弹道,这些变轨机动方式使得导弹的突防能力大大增强。从机动突防的原理分析,导弹主要是通过机动飞行来增大反导系统的解算和跟踪误差,同时使其处于非稳定跟踪的状态,增大动态瞄准误差。因此,从某种意义上可以认为,只要导弹进行一定强度的机动飞行,就能够提高突防能力。因而在军事训练中,抗击具有末端机动变轨能力的靶弹,对于检验防空系统的真实作战性能具有非常重要的意义[6-8]。
实际训练时使用的靶弹大多是由即将退役的老型号反舰导弹改造过来的,出于经济性和可靠性因素考虑,一般对弹上的控制、制导系统不作大的改动。如某型低空侧向变轨飞行靶弹的改造方案,就是利用变轨控制器的输出控制信号代替原末制导雷达输出信号控制导弹航向,从而实现了靶弹侧向蛇行机动[9]。因此,在具有机动变轨能力的靶弹系统中,变轨控制器输出信号的设计非常关键。
1 导弹靶弹弹道机动变轨设计
由于过载控制系统比姿态控制系统跟踪速度更快,控制精度更高,采用过载控制方法更容易对末端机动弹道进行控制,因此设计的导弹靶弹变轨弹道包括两组信号:过载指令信号nyc、nzc和位移指令信号yc、zc。本文主要研究导弹靶弹的各种末端机动变轨方式,包括:跃升机动、蛇行机动、摆式机动和螺旋机动,并提出统一的变轨弹道设计形式。
1.1 跃升机动
导弹靶弹的跃升机动可以视为1个周期的正弦机动或者1/2个周期的正弦机动。假设导弹靶弹在纵向飞行距离x1~x2的范围内作跃升机动,跃升机动的航迹图如图1所示。图1中,Oxyz为地面坐标系;V为靶弹飞行速度;y1为靶弹飞行高度;ly为靶弹正弦机动的幅值。
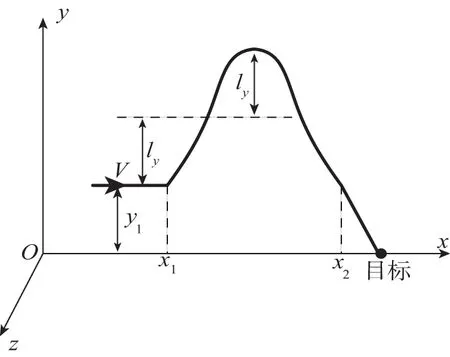
图1 跃升机动的航迹图Fig.1 Trajectory of jump maneuver
当靶弹结束在x2的跃升机动后,可以不对其施加控制,仅要求其保持速度方向和大小飞行目标。在纵向距离x1~x2范围内,跃升机动的位移指令信号为:
(1)
zc=z1
(2)
式中,ξ0为靶弹跃升机动的初始相位角,取值为0或-π/2;ky为设计参数,取值为1或2。显然,高度指令信号yc是纵向位移信号x的函数,而航向指令信号zc只需要保持原有状态即可。
过载指令信号根据靶弹在机动过程中的受力平衡进行推导,得到跃升机动过载指令信号如下:
(3)
nzc=0
(4)
采用如式(1)~式(2)的位移指令信号和如式(3)~式(4)的过载指令信号协调作用,导弹靶弹可以实现跃升机动,同时合理地选取设计参数,可以保证靶弹在跃升机动过程中俯仰角、迎角和侧滑角等各项性能指标都能满足要求。
1.2 蛇行机动
导弹靶弹的蛇行机动分为航向平面的蛇行机动和纵向平面的蛇行机动,这两种方式都可以视为多个周期的正弦机动。以导弹靶弹在纵向平面的蛇行机动为例,假设其在纵向飞行距离x1~x2的范围内作蛇行机动,蛇行机动的航迹图如图2所示。

图2 蛇行机动的航迹图Fig.2 Trajectory of snake-wriggling maneuver
图2中,Oxyz为地面坐标系;V为靶弹飞行速度;y1为靶弹飞行高度;ly为靶弹正弦机动幅值。在纵向距离x1~x2范围内,蛇行机动的位移指令信号为:
(5)
zc=z1
(6)
式中,ξ0为靶弹蛇行机动的初始相位角,取值为-π/2、0、π/2或π;ky>0为设计参数,用于控制蛇行机动的周期数,取值为偶数。
过载指令信号根据靶弹在机动过程中的受力平衡进行推导,得到纵向蛇行机动过载指令信号如下:
(7)
nzc=0
(8)
采用如式(5)~式(6)的位移指令信号和如式(7)~式(8)的过载指令信号协调作用,导弹靶弹可以实现纵向蛇行机动。
同理,假设导弹靶弹在纵向飞行距离x1~x2的范围内作航向蛇行机动,位移指令信号为:
yc=y1
(9)
(10)
式中,ξ0为靶弹蛇行机动的初始相位角,取值为-π/2、0、π/2或π;lz为靶弹航向正弦机动的幅值;kz>0为设计参数,用于控制蛇行机动的周期数,取值为偶数。
航向蛇行机动过载指令信号为:
nyc=0
(11)
(12)
采用如式(9)~式(10)的位移指令信号和如式(11)~式(12)的过载指令信号协调作用,导弹靶弹可以实现航向蛇行机动。无论导弹靶弹作纵向蛇行机动或者航向蛇行机动,通过合理地选取设计参数,可以保证靶弹在蛇行机动过程中俯仰角、迎角和侧滑角等各项性能指标都能满足要求。
1.3 摆式机动
导弹靶弹在飞行距离x1~x2的范围内作摆式机动。摆式机动可在横截图和纵向面分解为两种运动形式,在横截图的运动形式可视为单摆运动,在纵向面的运动形式可视为正弦运动。
靶弹摆式机动的航迹图、横截面图和纵向面图分别如图3、图4和图5所示。

图3 摆式机动的航迹图Fig.3 Trajectory of pendulum maneuver
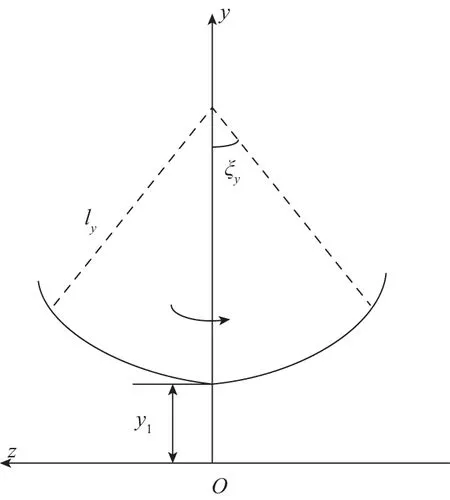
图4 摆式机动横截面图Fig.4 Cross section of pendulum maneuver
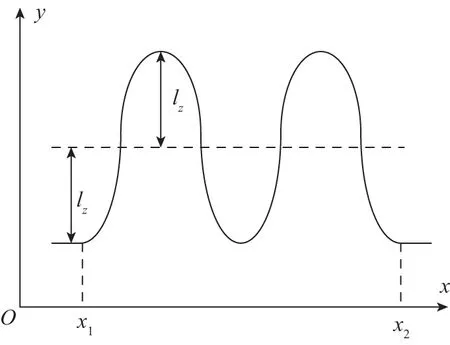
图5 摆式机动纵向面图Fig.5 Longitudinal section of pendulum maneuver
在图3~图5中,Oxyz为地面坐标系;y1为靶弹飞行高度;ly为靶弹作摆式机动时的摆长;ξy为摆式机动的摆角;lz为靶弹在纵向面的正弦机动幅值。在纵向距离x1~x2范围内,摆式机动的位移指令信号为:
yc=y1+ly+lysin(ξy)
(13)
zc=z1+lzcos(ξz)
(14)

过载指令信号根据靶弹在机动过程中的受力平衡进行推导,得到摆式机动过载指令信号如下:

(15)
(16)
采用如式(13)~式(14)的位移指令信号和如式(15)~式(16)的过载指令信号协调作用,靶弹可以实现摆式机动。通过合理地选取设计参数,可以保证靶弹在摆式机动过程中俯仰角、迎角和侧滑角等各项性能指标都能满足要求。
1.4 螺旋机动
导弹靶弹在飞行距离x1~x2的范围内作螺旋机动。假设靶弹作螺旋机动时旋转角速度为常数,且飞行速度大小也不变时,则靶弹螺旋机动在横截面上的运动形式可视为圆周运动。靶弹的螺旋机动航迹图和在横截面上的运动形式分别如图6和图7所示。
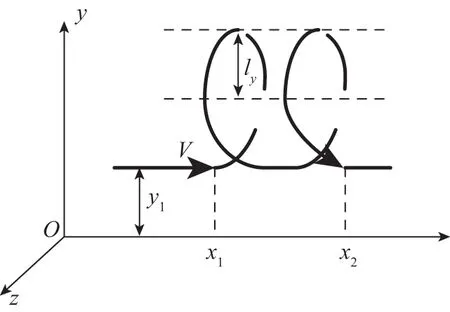
图6 螺旋机动的航迹图Fig.6 Trajectory of spiral maneuver
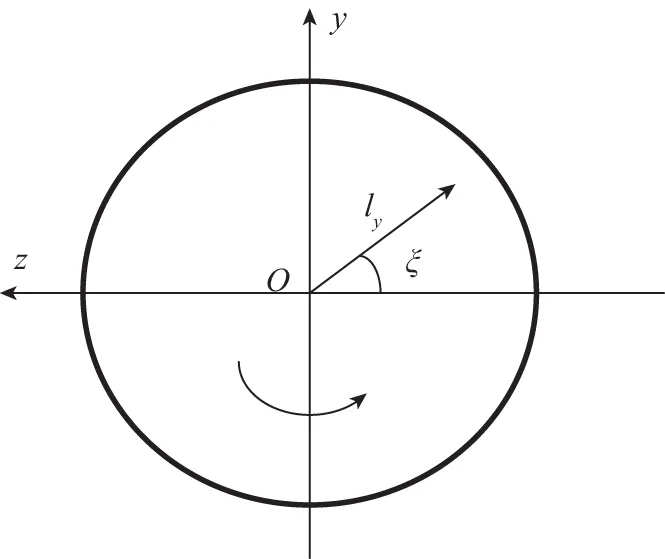
图7 螺旋机动横截面图Fig.7 Cross section of spiral maneuver
图6中,Oxyz为地面坐标系;y1为靶弹飞行高度;ly为靶弹作螺旋机动时的运动半径;ξ为螺旋机动的旋转角。在纵向距离x1~x2范围内,螺旋机动的位移指令信号为:
(17)
(18)
式中,ξ0为靶弹螺旋机动的初始相位角;ky>0为设计参数,用于控制横截面圆周运动的周期数,取值为2k(k=1,2,…);kz>0也为设计参数,当靶弹作螺旋运动时,要求kz=ky;z1为靶弹飞行初始时的航向位移值。
过载指令信号根据靶弹在机动过程中的受力平衡进行推导,得到螺旋机动过载指令信号如下:

(19)

(20)
采用如式(17)~式(18)的位移指令信号和如式(19)~式(20)的过载指令信号协调作用,靶弹可以实现螺旋机动。通过合理地选取设计参数,可以保证靶弹在螺旋机动过程中俯仰角、迎角和侧滑角等各项性能指标都能满足要求。
2 变轨形式通用设计
前面分别针对导弹靶弹作跃升机动、蛇行机动、摆式机动和螺旋机动时的位移指令信号和过载指令信号进行分析,指令信号形式比较复杂且不具有通用性,不利于工程应用。为了方便导弹靶弹多种变轨形式的设计,本节设计了变轨弹道的通用控制指令。
靶弹机动轨迹是导弹质心相对于地面坐标系Oxyz的运动轨迹。以靶弹飞行的纵向位移x为自变量,高度指令信号和航向指令信号都是x的函数。通过总结靶弹作跃升机动、蛇行机动、摆式机动和螺旋机动时的高度指令信号和航向指令信号,得到机动变轨的通用设计形式:
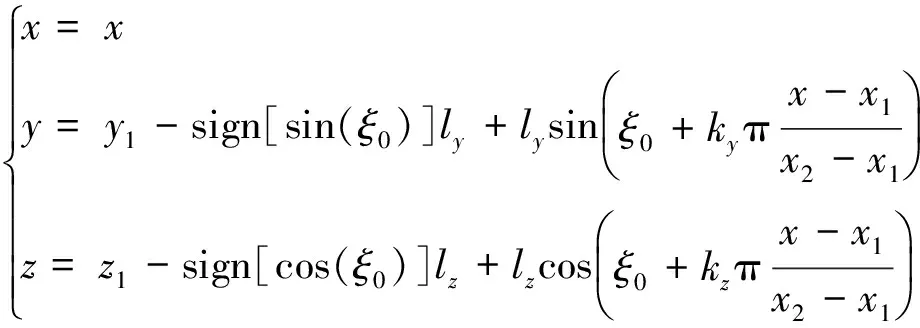
(21)
式中,ly、lz、ky、kz和ξ0为机动变轨的设计参数,各参数的取值要求分析如下:
1)导弹靶弹作跃升机动时,参数ξ0=0、ky=1、ly>0、kz=0和lz=0;或者ξ0=-π/2、ky=2、ly>0、kz=0和lz=0。
2)导弹靶弹作纵向蛇行机动时,参数ξ0取值为-π/2、0、π/2或π;ky=2k(k=2,3,…);ly>0;kz=0和lz=0。靶弹作航向蛇行机动时,参数ξ0取值为-π/2、0、π/2或π;ky=0;ly=0;kz=2k(k=1,2,…)和lz>0。
3)导弹靶弹作摆式机动时,参数ξ0=-π/2;ky=4k(k=1,2,…);ly>0;
kz=2k(k=1,2,…)和lz>0。
4)导弹靶弹作螺旋机动时,参数ξ0取值为-π/2、0、π/2或π;ky=2k(k=1,2,…);ly>0;kz=ky;lz=ly。

(22)
考虑到加速度与过载之间的转换关系,以及重力加速度的作用,过载指令在地面坐标系三个轴上的投影分量分别为:
(23)
3 仿真分析
导弹靶弹的机动变轨弹道实现需要过载指令信号和位移指令信号的互相配合、协调控制,各类设计参数的选取必须结合实际情况。通过MATLAB仿真,验证变轨弹道通用控制指令设计形式的正确性。
1)当分别选取情况1:参数ξ0=0、ky=1、ly=100、kz=0、lz=0;情况2:参数ξ0=-π/2、ky=2、ly=50、kz=0、lz=0时,导弹靶弹作跃升机动的仿真情况如图8和图9所示。

图8 导弹靶弹跃升机动情况1Fig.8 Jump maneuver 1 of target missiles
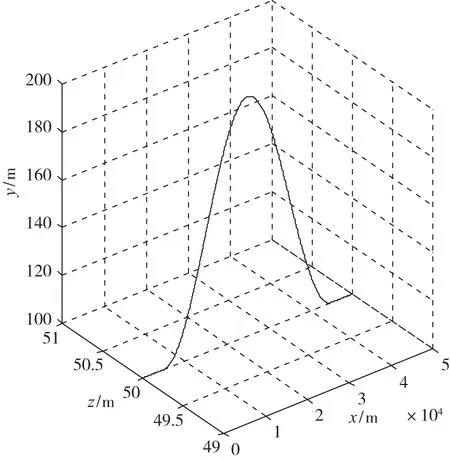
图9 导弹靶弹跃升机动情况2Fig.9 Jump maneuver 2 of target missiles
由图8和图9可知,分别选取两组不同的参数均可以使靶弹在纵向5000~45000m范围内实现高度200m的跃升机动变轨。然而,在图9中靶弹的飞行轨迹更为平滑,同时需要的法向过载也更大。因而,对于具有不同飞行性能的靶弹,必须合理利用靶弹过载,尽可能使其实际飞行弹道平滑。
2)当分别选取情况1:参数ξ0=-π/2、ky=4、ly=100、kz=0、lz=0;情况2:参数ξ0=0、ky=6、ly=200、kz=0、lz=0时,导弹靶弹作纵向蛇行机动的仿真情况如图10和图11所示。

图10 导弹靶弹纵向蛇行机动情况1Fig.10 Longitudinal snake-wriggling maneuver 1 of target missiles
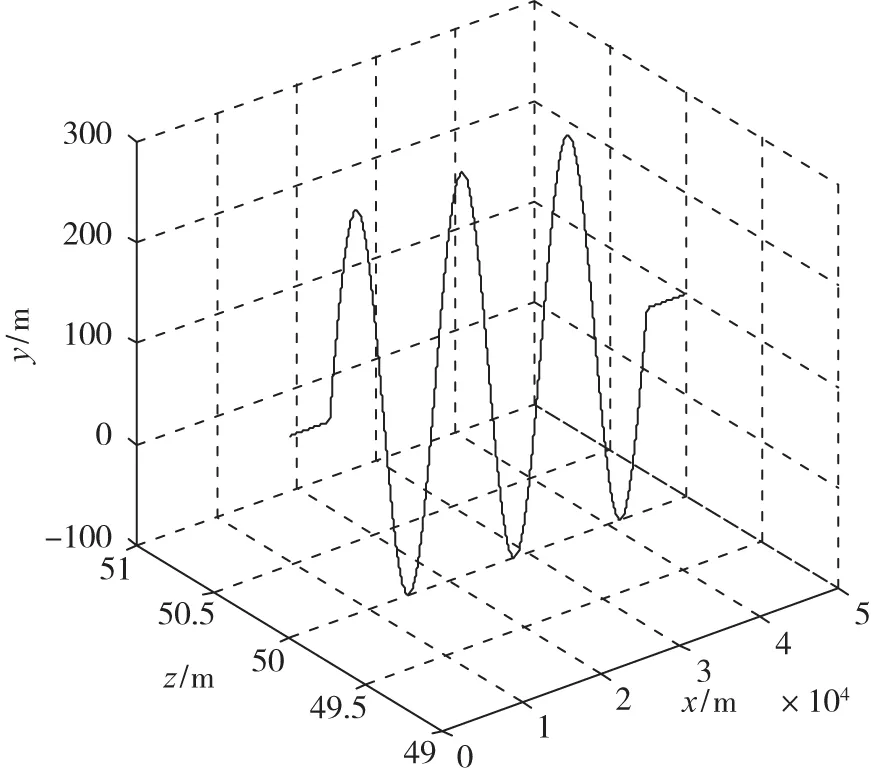
图11 导弹靶弹纵向蛇行机动情况2Fig.11 Longitudinal snake-wriggling maneuver 2 of target missiles
由图10和图11可知,采用不同的设计参数均可以使靶弹在纵向5000~45000m范围内分别实现幅值为100m的纵向蛇行机动变轨。但是比较图10和图11的结果可知,靶弹在相同的纵向距离内完成的机动变轨次数不同,显然图11中靶弹的蛇行机动变轨次数多于图10中的蛇行机动变轨次数,但同时这种飞行情况下靶弹需要的法向过载也会大于图10的情况。
分别选取情况3:ξ0=π/2、ky=0、ly=0、kz=2、lz=50;情况4:ξ0=π、ky=0、ly=0、kz=4、lz=100时,导弹靶弹作航向蛇行机动的仿真情况如图12和图13所示。
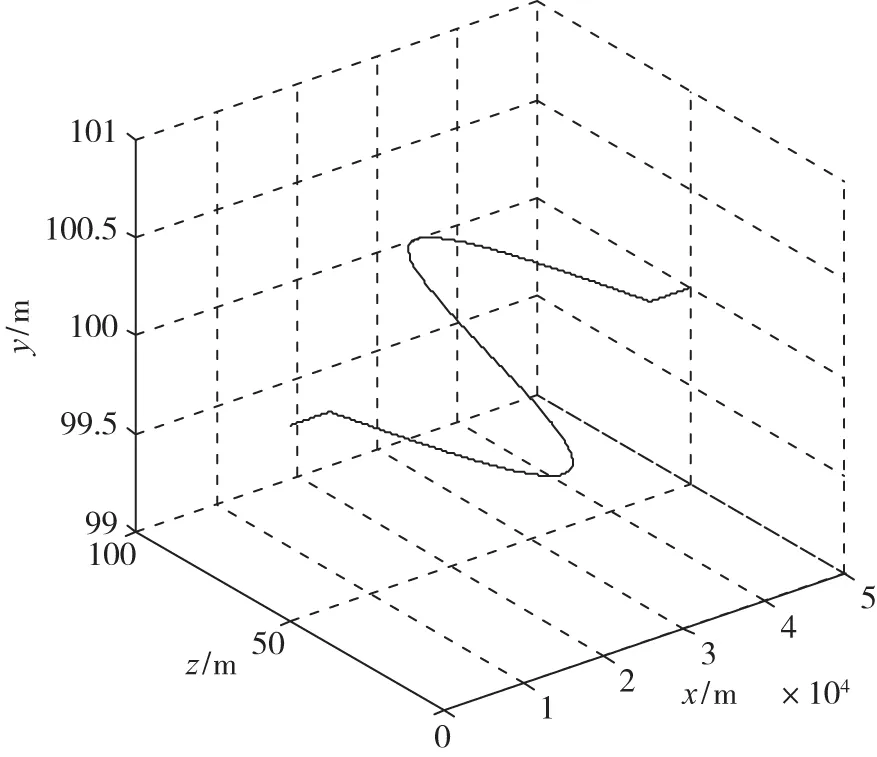
图12 导弹靶弹航向蛇行机动情况3Fig.12 Lateral snake-wriggling maneuver 3 of target missiles

图13 导弹靶弹航向蛇行机动情况4Fig.13 Lateral snake-wriggling maneuver 4 of target missiles
由图12和图13可知,采用不同的设计参数均可以使靶弹在纵向5000~45000m范围内分别实现幅值为50m的航向蛇行机动变轨。但是比较图12和图13的结果可知,靶弹在相同的纵向距离内完成的机动变轨次数不同。图12中靶弹在航向上的蛇行机动变轨次数为1个周期运动,而图13中靶弹的蛇行机动变轨次数为2个周期运动,因而在图13中靶弹需要的侧向过载也会大于图12的情况。
3)当分别选取情况1:参数ξ0=-π/2、ky=4、ly=50、kz=2、lz=50;情况2:参数ξ0=-π/2、ky=8、ly=100、kz=4、lz=20时,导弹靶弹作摆式机动的仿真情况如图14和图15所示。
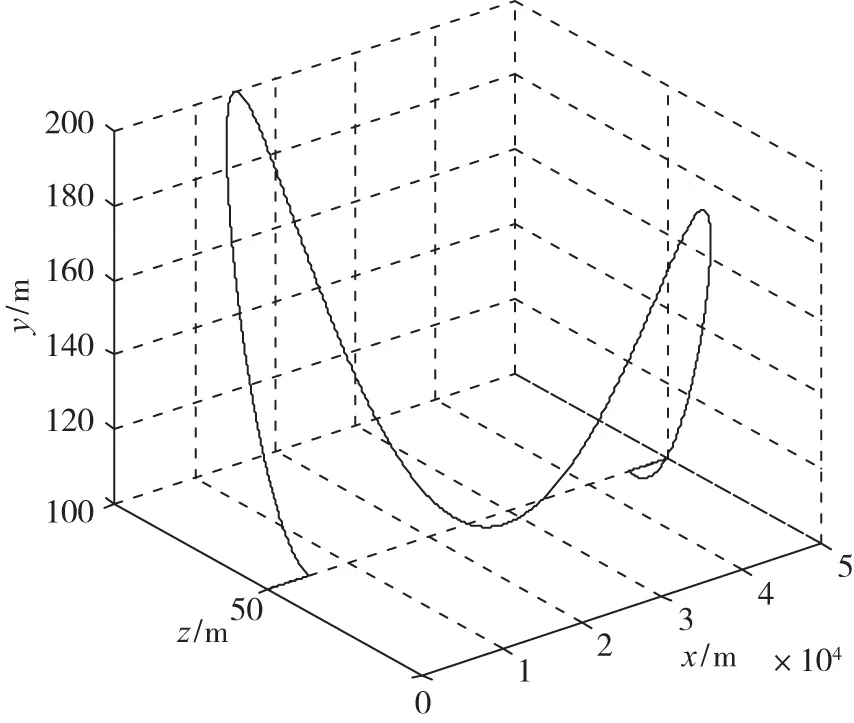
图14 导弹靶弹摆式机动情况1Fig.14 Pendulum maneuver 1 of target missiles

图15 导弹靶弹摆式机动情况2Fig.15 Pendulum maneuver 2 of target missiles
由图14和图15可知,采用不同的设计参数均可以使靶弹在纵向5000~45000m范围内分别实现幅值为100m和200m的摆式机动变轨。对比图14和图15的结果可知,图14中靶弹完成的摆式机动变轨次数为1个周期运动,而图15中靶弹完成的摆式机动变轨次数为2个周期运动,因而在图15中靶弹需要的法向过载和侧向过载都会大于图14的情况。
4)当分别选取情况1:参数ξ0=π/2、ky=4、ly=50、kz=4、lz=50时,情况2:参数ξ0=π、ky=6、ly=100、kz=6、lz=100时,导弹靶弹作螺旋机动的仿真情况如图16和图17所示。
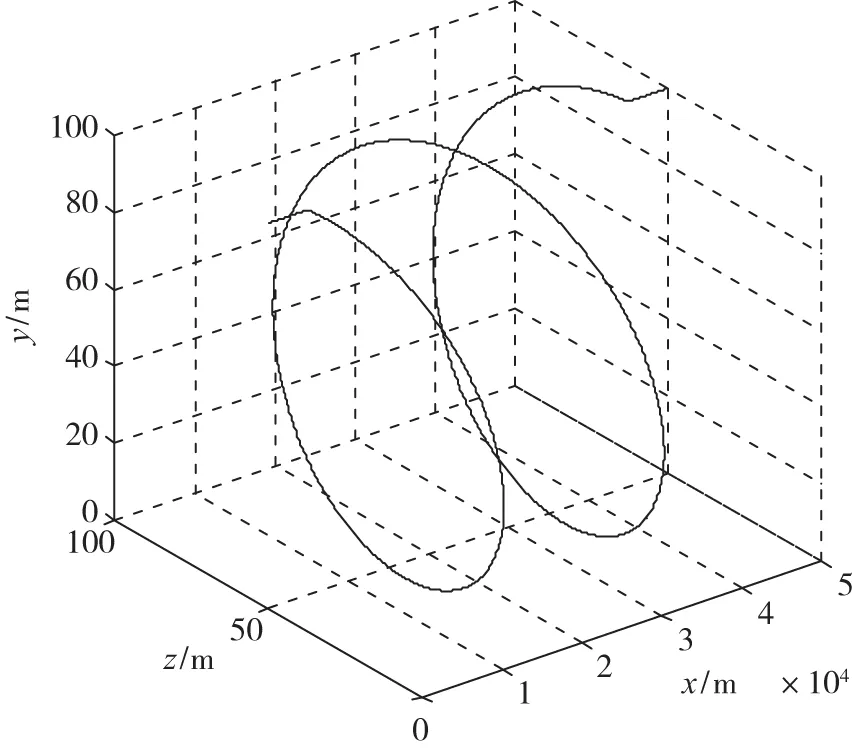
图16 导弹靶弹螺旋机动情况1Fig.16 Spiral maneuver 1 of target missiles
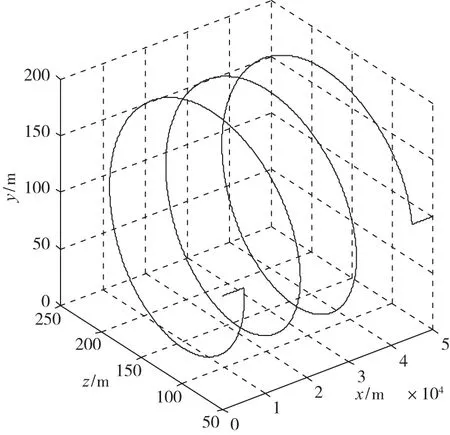
图17 导弹靶弹螺旋机动情况2Fig.17 Spiral maneuver 2 of target missiles
由图16和图17可知,采用不同的设计参数均可以使靶弹在纵向5000~45000m范围内分别实现幅值为100m螺旋机动变轨。对比图16和图17的结果可知,在图16中靶弹完成的螺旋机动变轨次数为2个周期运动,而在图17中靶弹完成的螺旋机动变轨次数为3个周期运动,因而图17中靶弹需要的法向过载和侧向过载都会大于图16情况。对于实现靶弹的机动变轨,必须结合靶弹实际可承受的最大过载进行实施。
4 结论
通过上述仿真可知,本文设计的变轨弹道通用控制指令可以满足靶弹跃升机动、蛇行机动、摆式机动和螺旋机动等各种变轨形式的弹道设计要求。变轨弹道通用控制指令的设计为实现靶弹多种变轨形式和实际训练中根据作战情况选择导弹变轨形式提供了技术基础。同时也减小了靶弹控制系统改造的难度,对于导弹靶弹系统的设计和研制具有参考借鉴价值。
[1]GhaweSN,GhoseD.Pureproportionalnavigationagainsttime-varyingtargetsmaneuvers[J].IEEETransactionsonAerospaceandElectronicSystems,1996,32(5):1336-1347.
[2]YangCD,YangCC.Optimalpureproportionalnavigationformaneuveringtargets[J].IEEETransactionsonAerospaceandElectronicSystems,1997,33(3):949-957.
[3] 王小虎,陈瀚馥,张明廉.中远程面(空)对空导弹末制导段的机动目标“标架”模型及自适应估计算法[J].宇航学报,2001,22(2): 61-70.
[4] 张涛,彭绍雄,宋宝贵.反舰巡航导弹弹道设计与优化探讨[J].飞航导弹,2002,32(7): 16-18.
[5] 曲东才,林涛.俄罗斯的白蛉(Moskit)反舰导弹[J].舰载武器,1997,5(3):7-11.
[6] 姜玉宪,崔静.导弹摆动式突防策略的有效性[J].北京航空航天大学学报,2002,28(2): 133-136.
[7] 崔静,姜玉宪.拦截导弹动力学特性对摆动式机动策略突防效果的影响[J].宇航学报,2001,22(5):33-38.
[8] 赵红超,顾文锦,彭文华.基于过载控制的反舰导弹的高度控制系统设计[J].战术导弹控制技术,2004,25(3):1-4
[9] 王亭.X型低空侧向变轨飞行靶弹[J].弹箭与制导学报,2007(5):309-311.
Design of General Control Instructions for Variable Trajectory Maneuvers for Target Missiles
BI Kai-bo,ZHANG Yi-fei,ZHANG Chuan-gang
(Dalian Naval Academy ,Liaoning Dalian 116018,China)
To solve the design problem of variable trajectory maneuver of target missiles, an integrated design model of variable trajectory maneuver is presented.By closely cooperating between the control signals of displacements and the control signals of overloads, this integrated design model can make target missiles to realize the maneuver of jump trajectory, the maneuver of snake-wriggling trajectory, the maneuver of pendulum trajectory, the maneuver of spiral trajectory, and so on.the variation form of optimal maneuver parameters and the combination form of basic maneuver trajectories are realized.Simulation results show the effectiveness of the proposed methods.
Target missile; Variable trajectory maneuvers; Overload control
10.19306/j.cnki.2095-8110.2016.04.006
2014-10-11;
2015-04-10。
毕开波(1965-),男,副教授,博士,研究方向为导弹控制与制导。E-mail:bkp2004@sina.com
TJ760
A
2095-8110(2016)04-0030-08