空管一次雷达抗风电场干扰目标检测方法
2016-03-13,,
, ,
(1.中国人民解放军95483部队, 四川成都 610054;2.中国人民解放军93897部队, 陕西西安 710077;3.中国人民解放军94326部队, 山东济南 250023)
0 引言
风力作为一种绿色能源越来越受到人们重视,目前我国的风力发电装机容量已经达到9.637×107kW。与此同时,风电场对雷达目标检测的干扰也开始受到了人们的重视,而国产空管雷达的发展[1]也使风电场干扰成为一个必须直面的问题。文献[2-3]研究了风电场对雷达探测的影响,指出风电场会引起虚警率上升、雷达盲区、目标丢失、航迹偏离等问题。文献[4-7]研究了风力发电机的RCS模型及回波信号模型,并将仿真结果与实测结果进行了对比,对比发现,风力发电机的雷达回波具有一定的周期性,回波形式主要受旋翼个数、旋转周期等影响。电磁波受到风轮机调制后,回波具有一定的频谱宽度,而空管一次雷达常用MTD滤波器组来滤除杂波,提取有用的目标信号,但风轮机回波往往会扩展到0号滤波器(低通滤波器)外,MTD后进行恒虚警率(Constant False Alarm Rate, CFAR)处理会形成虚警。
加拿大雷声公司最早将风电场抗干扰处理应用到实际雷达装备中[8],在其ASR-10/23SS空管一次雷达中采用了检测前、检测、检测后三步的处理方式,这是一种较实用的抗风电场干扰方法,但文献仅给出了总体介绍,未提供详细算法。Uysal等人在2014年国际雷达会议上提出了一种基于信号分解的风轮机杂波消除算法[9],该算法利用形态成分分析(Morphological Component Analysis, MCA)将风轮机杂波与飞行器目标回波叠加信号进行了分离,但该算法计算较复杂且需要较长时间积累。Karabayir等人则在2015年国际雷达会议上提出一种基于CLEAN算法的风轮机杂波消除算法[10],通过构造仅包含风轮机回波的辅助雷达距离维波形,将雷达接收回波信号减去该辅助信号以获得不包含风轮机回波的新信号,但该算法没有考虑风轮机雷达回波的不稳定性。
针对上述情况,根据飞行器及风轮机的雷达回波模型,提出了一种基于目标识别的抗风电场干扰目标检测方法,将风电场干扰抑制问题转化为飞行器目标与风轮机目标的识别问题,通过对回波信号的目标特性判断,剔除风轮机回波,保留飞行器目标回波。仿真表明该方法可以有效地完成飞行器目标回波与风轮机回波的辨别,保证飞行器目标在风电场杂波中航迹的连续性及准确性。
1 问题描述及数据模型
空管一次雷达为了实现对飞行器目标的自动检测、自动跟踪,往往采用MTD与CFAR结合的技术,在滤除固定物杂波后进行目标的恒虚警检测。风轮机随风转动后,照射的电磁波在反射后会产生多普勒频移,当这些信号进入MTD滤波器组的非0号滤波器时,就可能引起虚警;同时风轮机作为强反射体,产生强回波后会整体提高CFAR门限,影响飞行器目标的检测,产生阴影效应[8]。为了防止风电场杂波区成为雷达探测的“空洞”,则需要相应的算法完成风电场杂波区中风轮机回波的抑制及飞行器目标回波的检测。本文中考虑降低CFAR门限,使飞行器及风轮机回波都通过CFAR处理,但对通过CFAR门限的回波进行目标识别,判定其为飞行器或风轮机,将原问题转化为目标识别问题。这里先给出不同种类飞行器(涡扇、螺旋桨以及直升机)和风轮机的雷达回波模型。
飞行器目标的雷达回波包含机身回波、旋转部件回波(JEM分量)和噪声分量部分,综合表示[11]为
sAC(t)=as(t)[Cf_ACSf_AC(t)+CJEM_ACSJEM_AC(t)]+
Cnwn(t)
(1)
式中,as(t)为雷达系统对目标回波的总限制;Sf_AC(t),SJEM_AC(t)和wn(t)分别为机身分量、旋转部件分量和噪声分量;Cf_AC,CJEM_AC和Cn为各分量的系数。具体地,机身回波分量为
Sf_AC(t)= exp(j2πfdt)
(2)
JEM回波分量为

(3)
式中,fd为机身多普勒频移量,λ为雷达波长,R0为目标远场距离,α为方位角,β为俯仰角,L1m和L2m分别为桨叶根和桨叶尖到桨中心的距离,M为理想旋转部件数量(发动机数量),可见度函数V(α,β′,P)用来描述旋转部件遮挡情况,Nm为第m个旋转部件的叶片数,θkm=θ0+2πk/Nm,θ0为第0个桨叶的初始转角,一般忽略整个桨叶的扭转,g1m=sin(|β′| +ϑm)+sin(|β′|-ϑm) ,g2m=sign(β′)[sin(|β′|+ϑm)+sin(|β′|-ϑm)],ϑm表示浆叶角,β′用于区别旋转面方向,当旋转面平行飞行方向时β′=β, 垂直时β′=π/2-β,ωrm为第m个旋转部件的转速。
风轮机回波模型与飞行器目标模型类似,但风轮机为固定目标,所以没有整体目标的多普勒频移项fd,同时去掉了一些考虑不同飞行器类型而设置的参数。其常用回波模型[5,7]如下:
sWT(t)=as(t)[Cf_WTSf_WT(t)+CJEM_WTSJEM_WT(t)]+
Cnwn(t)
(4)
式中:Sf_WT(t),SJEM_WT(t)和wn(t)分别为风轮机塔分量、风轮机叶片分量和噪声分量;Cf_WT,CJEM_WT和Cn为各分量的系数。具体地,风轮机塔为固定物,回波仅包含距离调制:
(5)
风轮机叶片回波分量为
cos(γ)sin(θi)sinc(δi)
(6)
式中,A为系数,M为分辨单位中的风轮机个数,Ni为第i个风轮机的页片数,Li为桨叶长度,γ为雷达波束方向与风轮机旋转面的夹角,θi=ωit+2πn/Ni+θ0,ωi为转速,δi=(2πLi/λ)cos(α)· cos(γ)cos(θi),其他符号与之前飞行器模型中相同的符号代表相同含义,两个模型中各角度参数的具体含义可以参看文献[5,11]中图示。
在目标识别时,除了利用飞行器机身回波与风轮机回波特征进行识别外,还可以利用JEM特征提高识别的正确率。4种类型目标的典型JEM信号频谱如图 1所示,可以看出4种目标的JEM回波分量频率特性有较大区别。但实际应用中,空管雷达无法长时间照射目标,时间一般在20~100 ms,使得多普勒域的分辨率较低,简单的频域进行比较识别率较低,需要采用特征提取来进一步识别。

(a)涡扇飞机

(d)风轮机图14种目标JEM回波分量的典型频率特性(雷达频率为2.6 GHz,RPF=3 kHz,采样时间为1 s,前3种目标带有一定的整体多普勒频移)
2 目标检测方法
本文提出的目标检测方法总体步骤如下:
第一步空管雷达是固定配置,所以雷达工作范围内的风电场区域信息比较容易获得。为防止风轮机强回波提高CFAR门限,使得飞行器目标漏检,可根据相关信息在雷达中设置相应的距离方位波门图(RAG图),以降低CFAR门限。实际处理中,可在该区域设置航迹禁止起始区,当预测无飞行器通过该区域时,区域内的目标点都按风电场杂波处理,降低数据处理量。这一步是常规设置,数据处理从第二步开始。
第二步对可能进入风电场区域的目标作目标识别处理,区分涡扇飞机、螺旋桨飞机及直升机,而低分辨雷达对飞行器目标识别当前已有较多算法可供参考[11-13],本文不作进一步讨论。这一步是为了后续有效利用不同飞机器的JEM信息,提高风电场区域内目标识别的准确率。
第三步对风电场区域内的雷达信号进行MTD及CFAR处理,提取可能的目标,对超过CFAR门限并且处于航迹预测的波门内的目标进行飞行器与风轮机目标识别,具体算法见后文。将目标识别结果送给数据处理器进行相关处理,剔除风电场干扰。
因为第二步已经完成了飞行器类型的识别,所以第三步完成的是特定飞行器类型与风轮机的识别(例如,第二步中飞行器识别为直升机,那么第三步就只需要就直升机与风轮机进行识别)。为了提取不同目标的特征进行识别,就目标的频域特性进行分析。首先考虑回波信号频域的集中性,即集中大部分能量的频率点的多寡。这里采用频率能量熵[13]来作为提取特征1。首先将信号变换到频域并求模值:
M1(f) = |FFT(s(t))|
(7)
式中, FFT(·)为快速傅里叶变换, |·|为求模运算。
定义特征1:
(8)

为了更好地利用目标的JEM特性,需要先去除机身回波,并保留JEM回波。对飞行器而言,机身回波强度大于JEM回波,且如式(2)所示,仅有单一频率,所以可以通过找到频域中模值最大点的方法来去除,这也就是常用的CLEAN算法[14]。而对风轮机而言,JEM回波所占频点较多,剔除其中一点并不会明显影响其频率特征。CLEAN算法的简要步骤[13]如下:
第一步对回波信号s作快速傅里叶变换,S=FFT(s)。
第二步搜索找到S中模值最大的点,计算该点的频率f1、幅度ρ1及相位φ1。则机身回波为
(9)
式中 ,t=1,2,…,T。
第三步将回波信号减去机身回波,得到JEM回波信号:
sJEM(t) =s(t)-sF(t)
(10)
对CLEAN运算得到的sF(t)和sJEM(t),从中提取了两个特征量。
定义特征2:
F2= entropy(MJEM)
(11)
式中,MJEM为sJEM(t)的快速傅里叶变换结果求模值。该值反映了目标JEM回波的频域能量特征。
定义特征3:
F3= ‖sF‖2/‖sJEM‖2
(12)
式中, ‖·‖表示l2范数,该特征代表了目标机身回波能量与JEM回波能量的比值。
典型条件下,4种目标3种特征值的概率分布曲线如图 2所示。可以看出,4种目标3个特征的概率分布都存在重叠,无法由一种特征完成识别;但又各有区别,所以可以用来共同实现目标识别的功能。

(a)特征1
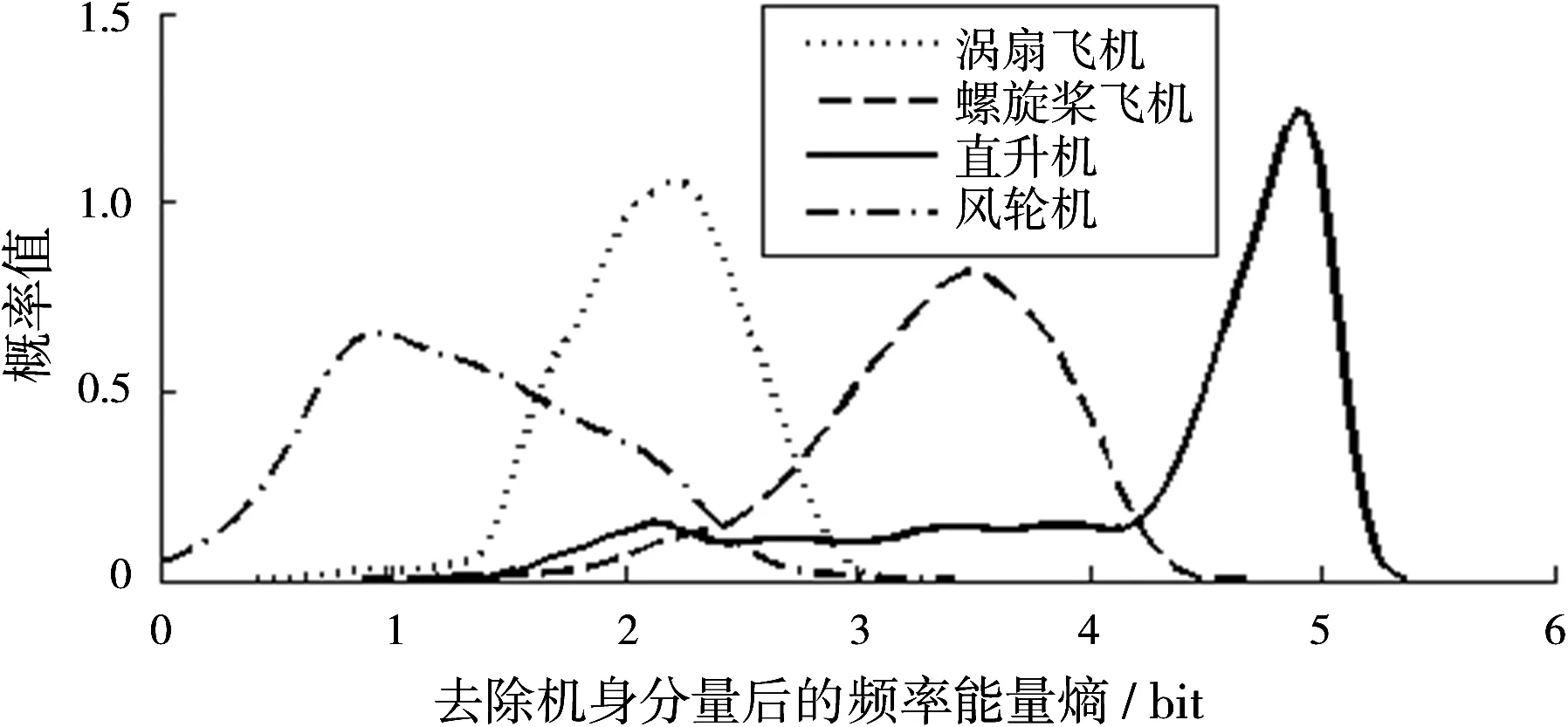
(b)特征2

(c)特征3图2 典型条件下4种目标3种特征值的概率分布曲线(雷达频率为2.6 GHz,RPF=3 kHz,采样时间为50 ms,详细仿真条件参见第3节)
支撑向量机(Support Vector Machine, SVM)方法是模式识别常用的算法之一,本文采用高斯核的SVM来完成目标的识别,先使用不含噪声信号样本来完成对分类器的训练,输出3种针对不同飞行器类别的分类器,最后对输入带有噪声的测试信号完成分类。算法流程如图 3所示,图示上半部分为分类器训练过程,下半部分为样本分类过程。因为在总的算法第二步中已经完成了飞行器的识别,所以实际下半部分的三路中只有对应飞行器的一路在进行处理。

图3 飞行器与风轮机目标识别算法框图
3 仿真实验及分析
仿真实验中,设置雷达工作频率为2.6 GHz,脉冲重复频率PRF=3 kHz。飞行器参数参考文献[13]设置,如表 1所示,其中涡扇飞机6种,螺旋桨飞机8种,直升机10种,飞机序号分别以T,P及H开头表示。仿真中各飞行器的飞行速度、距离及高度参考文献[11]设置,如表 2所示。此外,式(3)中V(α,β′,P)设为常数,方位角α及桨叶初相角θ0在U(0,π)随机取值,式(2)中机身回波幅度Cf_AC在一次照射时间内保持不变,不同照射组间服从Rayleigh分布,以符合SwerlingⅠ类起伏模型。风轮机参数参考文献[5]设置,式(6)中风轮机数M设为1,桨叶数Ni设为3,转速在U(5,25)(r/min)中均匀概率取值,风轮机桨叶长度在U(10,24)(m)中均匀概率取值,方位角α及桨叶初相角θ0在U(0,π)随机取值,因风轮机高度都很低,在距离R0足够大时,俯仰角随R0改变很小,所以R0设为常数。
在每次仿真实验中,每组数据使用飞行器序号随机抽取,4种目标先分别产生1 000组无噪回波数据用于分类器训练;然后再分别产生1 000组包含高斯白噪声的回波数据用于测试,即每个分类器的训练数据与测试数据都为2 000组(1 000组飞行器加1 000组风轮机)。
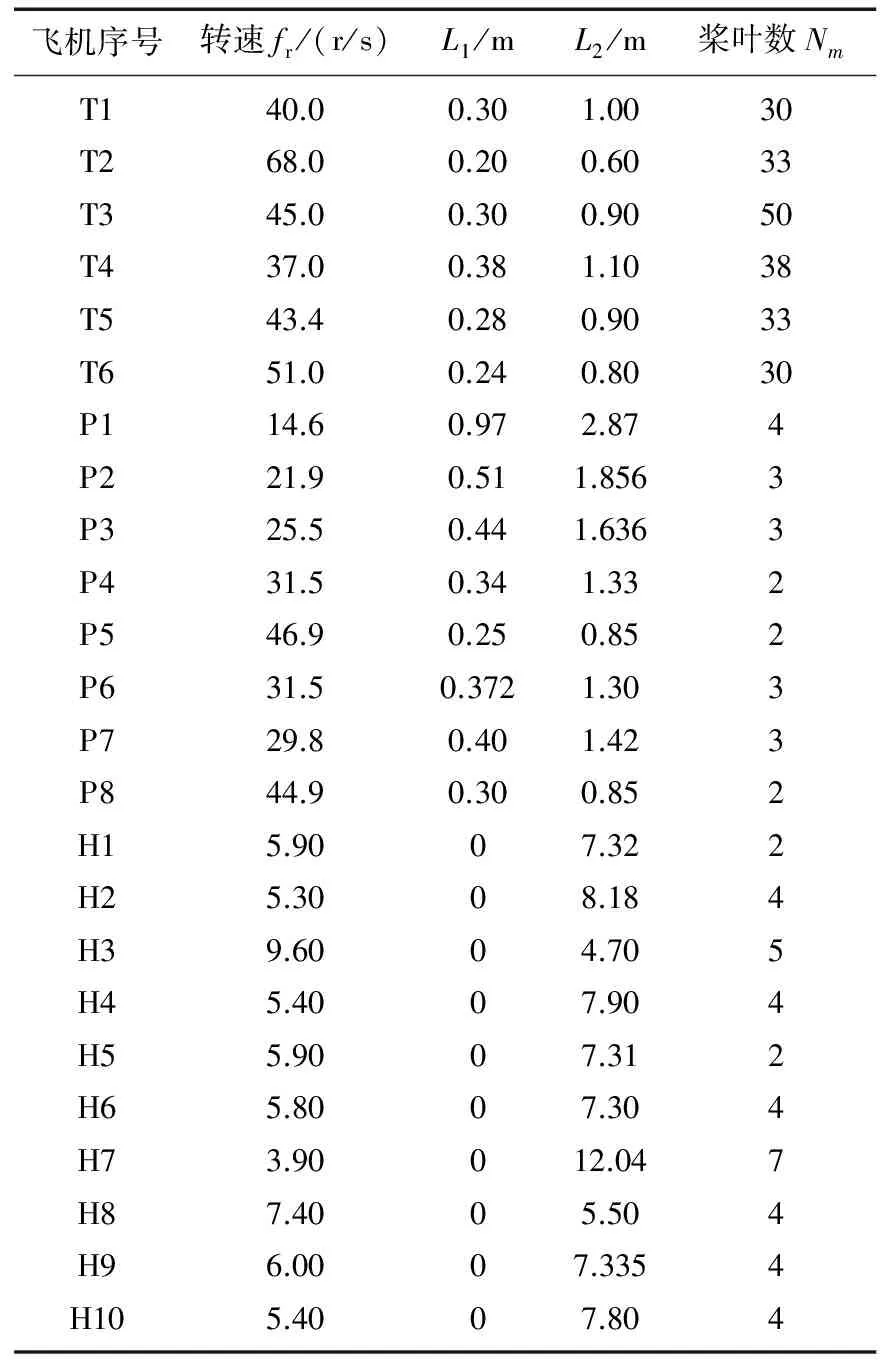
表1 3种飞行器旋转部件转速和结构参数

表2 3种飞行器典型场景下参数分布(U(a,b)代表(a,b)上均匀分布)
仿真实验1:总体性能及不同SNR对检测准确率的影响
设置照射时间为50 ms,3种分类器的检测准确率如图4所示。可以看出,当信噪比(SNR)高于10 dB时,3种飞行器都可以很好与风轮机进行区分,能够完成风电场中飞行器与风轮机回波的区分工作。此外,SNR低时,涡扇飞机与风轮机的识别准确率较高,因为涡扇飞机JEM回波特征较简单,抗噪声干扰能力较强。而随着SNR升高,另两种飞行器的识别准确率提升,因为这两种目标的JEM回波特征较复杂,SNR高时更容易与风轮机的JEM回波特征进行区分。

图4不同SNR下3种分类器的检测准确率及平均检测准确率
仿真实验2:不同照射时间对检测准确率的影响
设置SNR为15 dB,3种分类器的检测准确率如图5所示。可以看出,当SNR较高时,照射时间为20 ms即可以得到较良好的检测性能,当照射时间超过30 ms后,检测正确率缓慢提高但不明显。此外,对直升机与风轮机进行区分,其准确率相对照射时间不敏感。
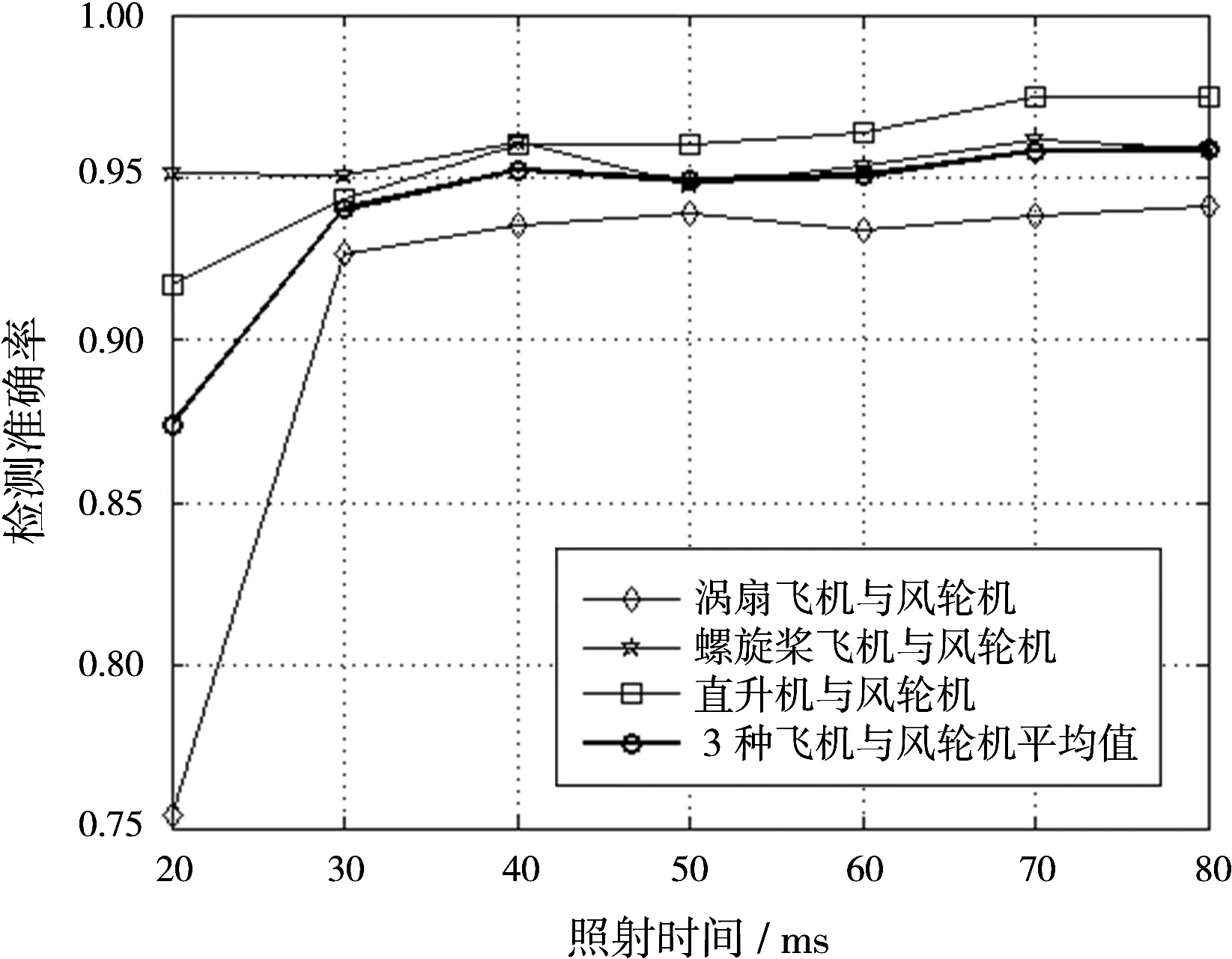
图5不同照射时间下3种分类器的检测准确率及平均检测准确率
4 结束语
本文将风电场干扰抑制转化为了飞行器与风轮机的目标识别问题,通过提取4种目标的整体特征及JEM回波特征,完成了对飞行器目标与风轮机干扰的区分。最后通过仿真实验验证了这种算法的有效性。在实际应用中,算法第三步可以不直接进行风轮机杂波的剔除,而是将检测目标的信息与判定结果一起发送给后续的点迹、航迹滤波,进一步提高检测的准确率。此外,本文没有考虑地杂波及低SNR下算法的修正,后续工作可以就地杂波及噪声的预滤除进行研究。
[1] 牛忠文,任翠锋,鞠金山,等. 大口径高精度航管雷达天线结构设计与应用[J]. 雷达科学与技术, 2015, 13(1):103-108.
NIU Zhongwen, REN Cuifeng, JU Jinshan, et al. The Design and Application of the Large-Diameter and High-Precision ATC Antenna[J]. Radar Science and Technology, 2015, 13(1):103-108.(in Chinese)
[2] SANTOS R M, CORREIA L M, ALVES C, et al. Analysis of Wind Turbines Generators Influence in Aeronautical Radars[C]∥IEEE Antennas and Propagation Society International Symposium, Memphis, TN:IEEE, 2014:711-712.
[3] GREVING G, BIERMANN W D, MUNDT R. Wind Turbines as Distorting Scattering Objects for Radar:Visibility, Desensitization and Shadowing[C]∥13th International Radar Symposium, Warsaw:IEEE, 2012:275-277.
[4] KENT B M, HILL K C, BUTERBAUGH A, et al. Dynamic Radar Cross Section and Radar Doppler Measurements of Commercial General Electric Windmill Power Turbines Part 1:Predicted and Measured Radar Signatures[J]. IEEE Antennas and Propagation Magazine, 2008, 50(2):211-219.
[5] MISHRA K V, CHANDRASEKAR V. Signal Analysis and Modeling of Wind Turbine Clutter in Weather Radars[C]∥IEEE International Geoscience and Remote Sensing Symposium, Honolulu, HI:IEEE, 2010:3561-3564.
[6] LOK Y F, PALEVSKY A, WANG J, et al. Simulation of Radar Signal on Wind Turbine[J]. IEEE Aerospace and Electronic Systems Magazine, 2011, 26(8):39-42.
[7] KARABAYIR O, YUCEDAG S M, COSKUN A F, et al. Wind Turbine Signal Modeling Approach for Pulse Doppler Radars and Applications[J]. IET Radar, Sonar and Navigation, 2015, 9(3):276-284.
[8] SERGEY L. HUBBARD O, DING Z, et al. Advanced Mitigating Techniques to Remove the Effects of Wind Turbines and Wind Farms on Primary Surveillance Radars[C]∥IEEE Radar Conference, Rome:IEEE, 2008:1-6.
[9] UYSAL F, PILLAI U, SELESNICK I, et al. Signal Decomposition for Wind Turbine Clutter Mitigation[C]∥IEEE Radar Conference, Cincinnati, OH:IEEE, 2014:60-63.
[10] KARABAYIR O, UNAL M, COSKUN A F. CLEAN Based Wind Turbine Clutter Mitigation Approach for Pulse-Doppler Radars[C]∥IEEE Radar Conference, Arlington, VA:IEEE, 2015:1541-1544.
[11] 陈凤,刘宏伟,杜兰,等. 基于特征谱散布特征的低分辨雷达目标分类方法[J]. 中国科学:信息科学, 2010, 40(4):624-636.
[12] MOLCHANOV P, EGIAZARIAN K, ASTOLA J, et al. Classification of Aircraft Using Micro-Doppler Bicoherence-Based Features[J]. IEEE Trans on Aerospace and Electronic Systems, 2014, 50(2):1455-1467.
[13] DU Lan, WANG Baoshuai, LI Yanbing, et al. Robust Classification Scheme for Airplane Targets with Low Resolution Radar Based on EMD-CLEAN Feature Extraction Method[J]. IEEE Sensors Journal, 2013, 13(12):4648-4662.
[14] TSAO J, STEINBERG B D. Reduction of Sidelobe and Speckle Artifacts in Microwave Imaging:The CLEAN Technique[J]. IEEE Trans on Antennas Propagation, 1988, 36(4):543-556.