一种雷达仙波航迹抑制方法
2016-03-13,
,
(中国电子科技集团公司第三十八研究所,安徽合肥 230088)
0 引言
不同体制、不同波段的雷达都存在一些未知源回波,即仙波。早期的研究者认为仙波是由鸟类或昆虫引起[1]的。但在很多“好天气”情况下,根据视觉观察却并没有发现这些鸟类或昆虫存在。研究者将这种非鸟类或昆虫的仙波称为“好天气”仙波[2-3],这种仙波大多出现在春夏两季,在我国,大多分布在东南沿海一带。文献[2-3]认为这些“好天气”仙波是由于近地大气层的温度分布不均匀引起大气湍流而形成的。初步研究表明,大气湿度大或水蒸气密度大应该是仙波形成的一个必要条件;仙波沿海岸线分布较多,这与海陆交界处存在很大的温度梯度密切相关,这说明空气对流明显也是仙波形成的一个条件。
基于对仙波回波信号特征分析,通过优化目标检测算法实现对仙波的抑制,是理论上研究仙波抑制的常用思路,但在工程实践上抑制效果不佳;采用雷达目标数据处理方法,结合目标点迹特征参数,通过对仙波空间分布统计、仙波目标运动特性分析和仙波点迹质量等级的综合应用,来抑制仙波目标虚假航迹的产生。近年来,雷达软件化、精细化和参数化设计程度越来越高,在信号处理、点迹处理和数据处理等处理流程中都专门进行了仙波回波点迹特性和仙波运动特征的分析处理,取得了很好的工程应用效果,这些成果解决了航管雷达全程全自动超始跟踪和极低虚假航迹率的系统设计问题,在工程应用上具有重要参考价值。
1 仙波成因初步分析
一般来说,仙波一方面跟大气的湿度梯度有关,另一方面也受热对流的影响。
1.1 大气湿度对仙波形成的影响
按照文献[3-4]的结论,空气中不同层之间的折射率相对改变量Δn可由温度梯度ΔT和湿度梯度Δe表示为
Δn·106=-1.4×ΔT+4.0×Δe
(1)
由式(1)可见,空气中的湿度梯度越大,折射率正改变量越大;温度梯度越大,折射率负改变量越大,两者对折射率的变化起相反的作用。当湿度梯度较大时对折射率起主导作用。
回波功率发射系数可用湿度梯度表示:
(2)
即功率发射系数与湿度梯度平方成正比。可见湿度梯度越大,回波功率越大。在春夏两季,近海处的空气湿度越大,不同空气层间的梯度也大,雷达回波的功率也大,故仙波显著增多。
1.2 海陆交界对仙波形成的影响
在海陆交界处白天光照条件下,由于陆地和海水比热的不同,两者升温速度不一。陆地升温快,而海水升温速度慢,结果是陆地的温度T1大于海水温度T2,这样陆地空气受热上升的程度大大超过海面空气受热上升的程度,而在陆海交界处形成一真空泵,迫使海面的空气向陆地方向流动,而海面上空的空气又补充过来,从而形成对流(富含水蒸气)。在天气晴朗且无多大风的情况下,这个对流会不断进行下去。
在夜间,情况正好相反。由于海水降温速度慢,陆地降温速度快,陆地的温度T1小于海水温度T2。近海空气在海水余温的加热下上升,而将陆地上空的空气补充过来,形成了对流。只要海水温度与陆地温度有差别,这个对流也会一直进行下去,这个对流也富含水蒸气。一个旋转的富含水汽的气团本质就是一团旋转的云,雷达回波会大大增强,这很可能是沿海岸线仙波比较密集且不分昼夜的原因。
2 仙波航迹抑制处理
根据对仙波成因分析,结合实际采集的仙波回波和点迹数据,可以得到下面3个统计结论:
1) 仙波点迹质量相对较低;
2) 仙波航迹多批次出现(同一时间段内),且在航向上具有一致性;
3) 仙波航迹速度变化范围固定,大部分仙波航迹速度范围为[0,100]m/s。
从数据处理角度上来说,这些统计结论基本涵盖了仙波点迹特性和仙波航迹特性,下面具体介绍各个统计结论在抑制仙波航迹处理中的应用。
2.1 点迹质量等级评估
综合相关文献[4-6],一般选取点迹杂波背景属性、点迹方位宽度、点迹距离宽度、点迹EP等级(回波点迹数)、点迹信噪比(点迹幅度)等特性参数参与点迹质量等级评估模型的计算。根据各个点迹特性参数分布特点,采用不同隶属度函数计算其对点迹质量的贡献度,再综合加权不同点迹特性参数的贡献度,最终得到点迹质量等级。
1) 正态型分布的函数形式为
(3)
式中,σk为对应模糊集A中第k个因素的展度,τk为调整度,其值通过仿真确定。
2) 居中型分布的函数形式为

(4)
式中,σk为对应模糊集A中第k个因素的展度,τk为调整度,其值通过仿真确定。
设PQuality为点迹质量等级,则有
PQuality=α1×QACM+α2×QAw+α3×QRw+
α4×QEP+α5×QSN
(5)

点迹质量等级直接影响目标起始准则的选取。统计数据表明,仙波点迹质量等级比正常目标点迹质量等级要低,系统可配置仙波点迹质量等级门限QAngel,此作为仙波航迹判别依据之一。
2.2 仙波航迹空间分布与运动模型
仙波航迹速度变化范围相对固定,其最大速度一般不超过100 m/s,但最小速度可以很小。在工程设计中可通过设置雷达系统目标跟踪速度范围——最小速度来过滤低于门限的慢速目标(也包括慢速的仙波航迹);系统配置最大的仙波航迹速度maxVAngel作为仙波航迹允许的最大速度门限,此速度门限作为仙波航迹判别依据之一。
仙波航迹在航向分布上存在一致性,这是仙波航迹出现时最明显的空间分布特征。通常可将航向空间按照S16(16等分,航向间隔22.5°)或S32(32等分,航向间隔11.25°)划分子空间,应用仙波点迹质量等级门限QAngel、仙波航迹速度门限maxVAngel等对统计每个航向子空间中的疑似仙波航迹数,再结合仙波状态确认门限FAngel-Confirm(判别帧数门限)、仙波航迹确认门限NAngel-Confirm(航向子空间中疑似仙波航迹数量门限)等进行仙波航迹识别,最后根据识别结果采取抑制处理。
2.3 仙波航迹抑制处理
仙波航迹抑制处理贯穿于雷达跟踪系统全流程设计中。在目标起始[7]、航迹跟踪维持、雷达显示、情报上报和参数化设计等处理过程中,对仙波抑制的处理内容和方法均不相同,下面分别进行叙述。
1) 目标起始
在目标全自动起始处理过程中,对仙波航迹的抑制处理主要表现在两个方面:一方面是根据仙波点迹质量等级低的特点,自适应调整起始准则,延缓或者摒弃仙波航迹的起始;另一方面是通过系统设置的目标最小起始速度门限,直接禁止低速的仙波航迹起始。通常情况下,通过上述方法的过滤处理,部分仙波形成不了航迹,在起始阶段直接就抑制掉了,其他能正常形成航迹的仙波交由航迹跟踪维持进行进一步抑制处理。
2) 航迹跟踪维持
航迹状态更新后,首先确定航迹所处的航向子空间,再通过仙波点迹质量等级门限QAngel、仙波航迹速度门限maxVAngel等门限条件下的筛选统计,确定疑似仙波航迹数;最后根据仙波状态确认门限FAngel-Confirm(判别帧数门限)、仙波航迹确认门限NAngel-Confirm等准则进行仙波航迹识别并进行标记,被标记的仙波航迹在雷达显示和情报上报中作特殊处理。
3) 雷达显示
雷达显示对仙波航迹的特殊处理包括显示控制、独立的标牌显示(颜色和标牌内容与正常航迹不一样)。即在雷达显示画面上,操作员可根据需要显示或不显示仙波航迹;另外,仙波航迹标牌颜色、历史航迹点颜色、上报状态显示等可由操作员个性化设置。
4) 情报上报
系统可配置仙波航迹缺省是上报还是不上报,情报处理依据系统配置决定是否将仙波航迹上报给上级指挥所;同时也可根据操作员要求上报指定的仙波航迹。
5) 参数化设计
仙波产生的机理比较复杂,仙波表现出来的信号特征、运动学特征等还需要进一步分析、研究。为适应一些未知仙波抑制处理的需要,结合航管雷达、情报警戒雷达等对异常空情处理要求不同(用户需求不同),对仙波抑制处理全过程进行精细化、参数化设计,形成一套仙波抑制处理的优化参数(如表1所示),操作员根据作战需求和阵地条件进行灵活设置。

表1 仙波处理优化参数表
3 实际雷达应用效果
某型航管雷达于2014年10月—2016年1月期间在黄海某雷达阵地进行试验、试用工作。该雷达阵地三面环海,剩下一面正对城市建筑和高山,雷达面临的海杂波和城市强地物杂波比较严重,该型号雷达数据处理系统采用了上述仙波抑制处理方法。雷达在试验期间24 h连续工作,航迹跟踪处于全程全自动工作状态。在雷达试验1年多的时间里,多次发现仙波航迹,雷达系统完整地记录了这些数据,通过对雷达跟踪画面的观察和数据分析,可以看出这种仙波抑制处理方法在该型雷达上得到成功应用,取得了很好的仙波抑制效果。本文选取了一次最具代表性的仙波航迹跟踪画面(如图1所示),通过跟踪画面可以很清晰地看到实际仙波抑制情况。
图1为该型雷达自动识别并过滤出仙波航迹的实际跟踪画面。探测该仙波时雷达基本情况如下:
1) 架设位置:某海域岸边,站高30 m(包括塔高);
2) 探测时间段:晚上8点左右(2015年12月24日);
3) 雷达录取方式:全程全自动起始/自动跟踪;
4) 每帧点迹数(包括剩余点迹):220点左右。
其中,T018,T020,T023,T028,T045,T062,T063等7批为仙波航迹,系统在自动起始T023目标3帧后自动识别出仙波航迹,并进行有效标注。
4 结束语

(a)雷达实际跟踪画面
采用数据处理方法在工程上可以有效地抑制仙波虚假航迹的产生,通过增加积累帧数,也可以提高仙波航迹识别率。但是最好的仙波航迹抑制处理方法还是要结合雷达信号处理、点迹处理和数据处理等进行联合处理,研究仙波点迹特性参数与正常目标点迹特性参数的差异,结合阵地优化参数和必要的距离方位图(RAG)来进一步提高仙波航迹抑制处理效果。另外,对仙波航迹的抑制处理也会影响系统对低慢小目标的检测和跟踪,需要在后续工作中进一步完善算法模型。
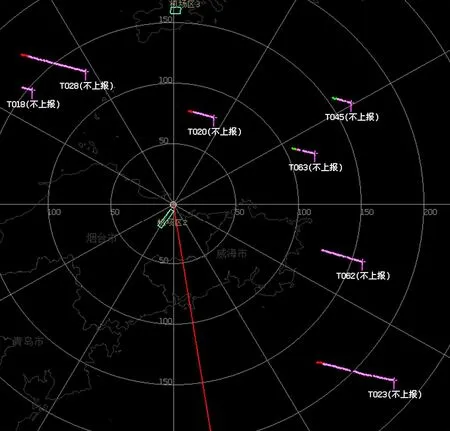
(b)过滤出来的仙波航迹图1 某雷达仙波抑制处理效果图
[1] HARTLEY-SMITH A. Ground and Angels Clutter in Radar Systems[J]. GEC Journal of Science and Technology, 1972, 39(4):173-180.
[2] KLEMBOWSKI W. Experimental Study of Polarization Influence on Angels Intensity[C]∥IEEE International Radar Conference, Arlington, VA:IEEE, 1990:362-364.
[3] VETROV V I, SKVORSOW V S, TANYGIN A A, et al. On Possibility of Radar Angel-Echoes Study with Sodar and RASS Techniques[C]∥IET International Radar Conference, Edinburgh:IET, 1997:46-49.
[4] 何漫,张亚璇,解洪文,等. 基于回声状态网络的OTHR海杂波抑制方法[J]. 雷达科学与技术, 2015, 13(4):367-373.
HE Man, ZHANG Yaxuan, XIE Hongwen, et al. Sea Clutter Suppression Method of Over-the-Horizon Radar Based on Echo State Network[J]. Radar Science and Technology, 2015, 13(4):367-373.(in Chinese)
[5] 鉴福升,曾浩. 实测海杂波数据的统计拟合优度分析[J]. 雷达科学与技术, 2013, 11(3):276-280.
JIAN Fusheng, ZENG Hao. Statistical Analysis of Goodness-of-Fit Based on Real Sea Clutter Data[J]. Radar Science and Technology, 2013, 11(3):276-280.(in Chinese)
[6] 魏明珠. 机载预警雷达海杂波的抑制方法[J]. 雷达科学与技术, 2015, 13(6):627-632.
WEI Mingzhu. Study on Sea Clutter Suppression for Airborne Early Warning Radar[J]. Radar Science and Technology, 2015, 13(6):627-632.(in Chinese)
[7] 张发兵,李敬. 基于目标特征信息的航迹起始[J]. 现代电子技术, 2011, 34(17):4-6.
