基于光栅干涉仪的超精密位移定位测量新方法*
2016-02-07王池平许黎明陈家宝
时 轮,王 鹤,王池平,许黎明,陈家宝
(上海交通大学 机械与动力工程学院,上海 200240)
基于光栅干涉仪的超精密位移定位测量新方法*
时 轮,王 鹤,王池平,许黎明,陈家宝
(上海交通大学 机械与动力工程学院,上海 200240)
对进一步提高光栅干涉仪定位检测系统的定位精度和位移检测分辨率进行了研究,分析了检测视场中干涉条纹的不同测量位置对定位系统的影响,提出了一种利用干涉相移进行超精密位移检测的新方法,在传统的光栅干涉仪系统中加入相位扫描机构,使光电传感器在检测视场中的两个干涉条纹间进行移动,从而改变了光栅干涉仪的接收相位,理论上可以达到纳米、亚纳米等更高精度的检测。精密定位检测实验表明,采用该检测定位方法可以提高定位精度16%以上。
光栅干涉仪;位移测量;条纹;相移
0 引言
超精密定位检测技术是现代精密制造和精密装备的基础,而纳米、亚纳米级的位移测量技术又是制约超精密定位技术发展的一个核心[1-3]。在本领域广泛采用激光干涉定位检测和光栅干涉仪定位检测技术,其中激光干涉仪测量分辨率可以到达纳米级甚至亚纳米级,由于具有很高的检测分辨率,获得了广泛应用,但其对应用环境的温度、湿度等各方面的要求较为苛刻,而且光路复杂,成本高昂,这也限制了它在很多场合的应用[4-6]。
光栅干涉仪定位检测是一种传统的位移测量方法,测量分辨率可以到达亚微米,对于环境具有很强的适应性[7-8],结构更简洁,制造和使用成本更低廉,但光栅干涉仪检测精度直接依赖于检测元件的物理精度,这给进一步提高检测分辨率带来了极大的困难,在如何提高光栅测量的分辨率方面,目前各种研究方法的共同点是对光栅形成的光电信号进行大倍率细分,而要达到亚纳米级分辨率,其细分倍数要高达104以上,受到光栅制作质量的限制,高倍率细分方法在实际应用中很难实现[9-10]。
本文以衍射光栅作为测量基准,不采用光栅信号细分的方法,而是设计了光栅相移机构,通过改变光电接收器在干涉条纹视场中的位置,改变了光栅接收相位,进而理论上可以达到亚纳米级以上的超高分辨率,是一种超精密定位测量的新方法。
2 传统光栅干涉仪位移检测原理
2.1 光栅干涉仪系统的组成
光栅干涉仪系统由参考光栅G、等光程分光束棱镜C、激光源D及光电传感器E等主要部分组成,参考光栅为高精度的衍射光栅,固定在位移移动台上,等光程分光棱镜等装置固定在固定台上,不跟随目标移动台运动,如图1所示。
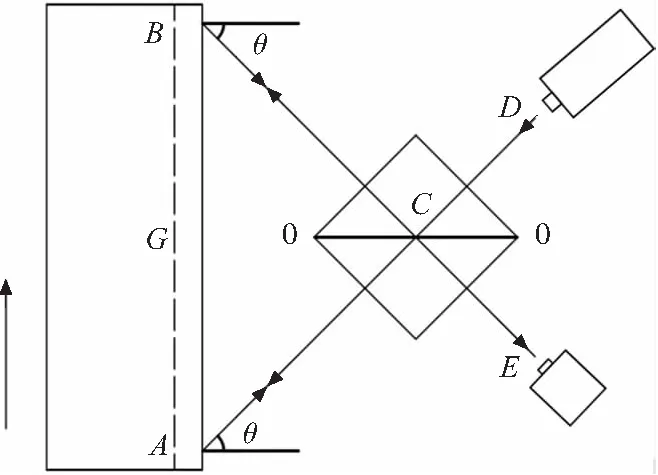
图1 光栅干涉仪检测系统组成
2.2 光栅干涉仪位移检测原理
激光光源D发出的入射光在等光程分光束棱镜的分光面O-O处被分成透射光和反射光两路,分别投射在闪耀光栅G的A、B处,当衍射光栅G在自准状态下,两路衍射光束将会沿原光路返回,在图1中的C点相交,形成干涉,产生干涉条纹。
在实际使用中,将参考光栅G固定在目标位移台上跟随目标位移台一起运动,形成的干涉条纹将在检测视场中随之移动,通过光电传感器E可以对条纹信号进行计数,计数值代表了位移台的移动距离。当基准光栅随工作台沿图示方向移动Δx时,这两束相干光的相位差为[11]:
ΔΦ=4πmΔxA
(1)
式中,m—光谱级次,A—基准光栅栅距,实际中A=3.33μm。
当Δx=A,m=2时,ΔΦ=2π×4,该光栅干涉仪相当于四倍频。即基准光栅位移一个栅距时,有4个干涉条纹信号产生,计数脉冲当量为0.83μm。
3 光栅相位移动干涉检测定位原理
光栅相位移动干涉检测系统由参考光栅G、等光程分光束棱镜C、激光源D、光电传感器E及相移机构F等主要部分组成,与传统的光栅干涉仪系统相区别的是,光电传感器固定在相移机构上,在精密定位检测时可以进行相位移动,如图2所示。
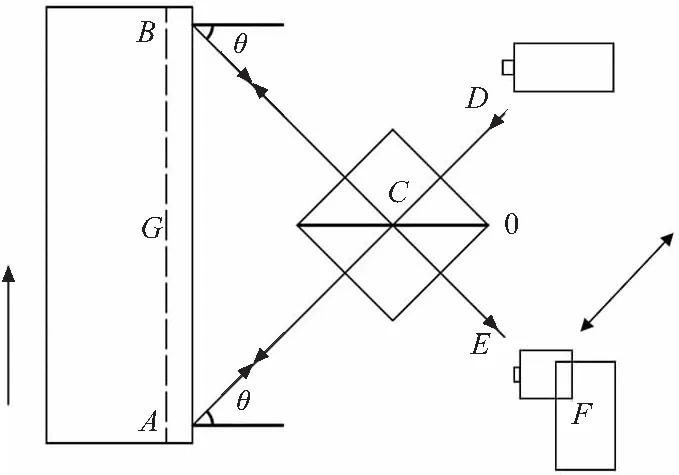
图2 光栅干涉仪相位移动检测系统组成
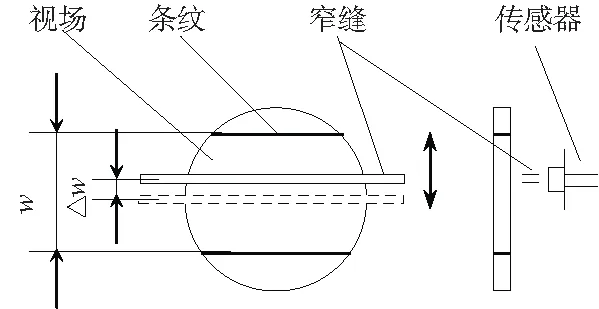
图3 光栅干涉仪干涉条纹图
通过调节干涉仪的分光面与参考光栅的位置关系,可以使光电传感器的接收视场中只存在两条干涉条纹,如图3所示,根据之前所得的光栅运动位移和两束光相位之间的关系,在理论上可以认为条纹的相位信号在0°~360°之间被分成了无数份,且均匀地分布在两条纹之间,若改变光电接收器的位置,就相当于改变了条纹信号的接收相位,当将光电接收器主动移动一个位移时,该位移增量对应的条纹计数当量值为:

(2)
其中,a—光栅干涉仪的计数脉冲当量,Δw—光电传感器的相移,w—视场中两干涉条纹的间距。
若取光栅栅距A=3.33μm(300lines/mm),m=2,Δw=10μm,w=20mm,则由式(2)可得,Δa=0.415nm,已达到亚纳米级的分辨率。
其检测定位过程如图4所示,在位移台的位移与终点距离小于一个脉冲当量时,通过相移机构产生相移Δw,完成最终定位过程。

图4 光栅相位移动干涉检测定位流程图
4 实验验证
4.1 光栅干涉仪位移检测实验
搭建了光栅干涉相位移动的超精密定位测量系统,利用300 groove/mm的闪耀光栅及等光程分光镜构成光栅干涉仪,获取基准光学四倍频信号;以光电二极管作为条纹信号接收器,将光信号转换为电信号;以Elmo驱动控制器和直线音圈电机构成光电探测器在干涉条纹视场内的移相装置,与光电探测模块固联,实现光电探测模块的相移。
目标位移台选取德国PI有限公司的精密位移台PLS-85 DC,与所搭建的超精密测量系统整合成完整的精密定位系统。PLS-85 DC行程范围155mm,最大速度100mm/s,最小步距50nm。由前述,实验检测系统理论上应该获得光学四倍频信号,即光栅移动一个栅距对应四个信号周期,每个信号的位移当量为A/4。为验证光路系统是否实现这一功能,设计如下实验系统:精密光栅置于PI精密定位平台上,令PI精密定位平台以指定的速度运行,利用示波器测量来自光电接收模块的电压信号,得到如图5所示的波形。通过测量图中相邻两个下降沿之间的时间,可换算出两种速度下的信号频率分别为0.83Hz和8.695Hz。
在选定二级衍射光条件下,光栅运行速度与干涉条纹信号的频率之间有如下关系:

图5 光栅干涉仪相移干涉定位检测实验照片
(3)
参考光栅的线密度为300线/mm,代人式(3),可得当光栅运动速度为7μm/s和70μm/s时,其所对应的条纹信号频率应该为0.84Hz和8.4Hz,与实验观察得到的波形频率近似。
4.2 光栅相位移动干涉定位检测实验
PI运动平台自身不带位置反馈装置,可以直接应用本文所提出的位移检测系统作为其闭环控制的位置反馈信号,相位移动机构采用音圈电机运动平台,位移定位检测实验系统的照片如图6所示,应用激光干涉仪(OPTODYNE,MCV-500)对实验结果进行验证。

图6 光栅干涉仪相移干涉定位检测实验照片

传统定位检测方法相位移动定位检测方法定位误差定位误差r13999.842μm158nm4000.154μm154nm23999.821μm179nm4000.138μm138nm33999.817μm183nm4000.152μm152nm43999.873μm127nm4000.131μm131nm53999.789μm211nm4000.143μm143nmAverage172nm144nm
如上表所示,实验中分别进行了传统的光栅干涉仪定位检测方法实验和光栅相位移动干涉定位检测方法实验,利用激光干涉仪进行了检测验证,并将二者的实验结果进行了对比。
实验中采用2级衍射光,光栅干涉仪的脉冲当量为0.83μm,视场内的条纹间距为10mm。实验定位点选择为4mm,即理论上到达定位点需要4819.3个脉冲,因此,传统的定位检测系统的定位误差理论上为0.25μm,相位移动定位检测方法会在4819个脉冲后进行相位移动,理论上定位误差可达0.09nm。
由表中列出的对比实验发现,干涉相移方法可以提高定位系统的精度16%以上。
5 结论
提出了一种光栅干涉相位移动的超精密位移定位检测方法,通过在光栅干涉检测系统的接收视场中移动光电传感器,实现了光栅干涉仪接收相位的移动,如果适当选择系统参数,理论上可获得比激光干涉仪更高的位移检测分辨率。采用这一方法搭建了实验系统并进行了定位检测实验,实验结果表明,新的位移检测方法可以提高定位精度16%以上。
[1] 钟俊. 宏观尺度的纳米级定位控制技术研究[D]. 合肥: 中国科学技术大学, 2011.
[2] 胡兵. 基于直线电机宏微双重驱动大行程精密定位台的研究[D]广州:广东工业大学, 2013.
[3] D Croft,S Devasia.High precision stages for micro/nano-lithography[J].Proceedings of SPIE, 1997,3225 :68-75.
[4] Yoshioka H, Kuroyama S, Sawano H,et al.Sub-nanometer positioning with a high resolution laser interferometer[J].Proceedings of the 10th International Conference of the European Society for Precision Engineering and Nanotechnology, 2010 (1):404-407.
[5] 姜歌东, 窦成东, 陈疆. 基于激光尺的机床动态测试系统特性研究[J]. 组合机床与自动化加工技术, 2015(12): 65-69.
[6] 王平江, 雷宇晴, 邹尚波,等. 在机测量技术现状与发展趋势[J]. 组合机床与自动化加工技术, 2015(1): 1-4.
[7] 王国超,颜树华,高雷,等. 光栅干涉位移测量技术发展综述[J]. 激光技术, 2010, 34(5): 661-664.
[8] 齐永岳,赵美蓉,林玉池. 纳米测量系统的研究现状与展望[J]. 仪器仪表学报, 2003, 24(4): 91-94.
[9] 罗华, 高山, 李翔龙. 粗光栅信号全数字化处理法实现高倍数细分[J]. 光学精密工程, 2007, 15(2): 283-288.
[10] 乔栋, 续志军, 吴宏圣,等. 绝对式光栅尺细分误差补偿方法[J]. 光学学报, 2015,35(1):212-217.
[11] 时轮. 一种亚纳米级变栅距衍射光栅制作方法的研究[J]. 光学技术,2003, 29(3):320-326.
(编辑 李秀敏)
Study of Displacement Measuring Based on Grating Interferometer on Ultra-precision Positioning System
SHI Lun, WANG He, WANG Chi-ping, XU Li-ming, CHEN Jia-bao
(School of Mechanical Engineering, Shanghai Jiao Tong University,Shanghai 200240,China)
Study on how to improve the positioning precision and displacement measuring resolution of positioning system, basing on grating interferometer, is discussed. The influence of different measuring position of coherent fringe in the optical field to the positioning system is analyzed and a new method of phase shift of coherent fringe is developed. A phase-shift device is introduced to the grating interferometer system. The change of the grating phase, by moving the sensor between two interfere-fringes, leads to higher measuring resolution ability than that of laser interferometer in theory, even to nanometer or sub-nanometer. Experiments show that the new method will improve the positioning accuracy more than 16%.
grating interferometer; displacement measurement; fringe;phase shift
1001-2265(2016)12-0065-03
10.13462/j.cnki.mmtamt.2016.12.018
2016-08-30;
2016-10-03
国家自然科学基金面上项目(51275306)
时轮(1968—),男,长春人,上海交通大学副教授,工学博士,研究方向为机电检测与控制,(E-mail)shilun@sjtu.edu.cn。
TH122;TG506
A