扬声器作为惯性作动器的结构振动主动控制研究*
2016-02-07毛崎波
刘 健,毛崎波
(南昌航空大学 飞行器工程学院,南昌 330063)
扬声器作为惯性作动器的结构振动主动控制研究*
刘 健,毛崎波
(南昌航空大学 飞行器工程学院,南昌 330063)
目前扬声器主要用于声场激励,文章将扬声器作为惯性作动器应用于结构振动主动控制中,实现结构振动控制,并将其应用到实际工程应用中。建立并研究基于扬声器的惯性作动器模型,设计振动主动控制实验系统,采用直接速度反馈控制策略进行实验,理论计算和实验结果表明:扬声器作为惯性作动器实现结构振动控制是可行的。
扬声器;惯性作动器;直接速度反馈;结构振动;振动主动控制
0 引言
振动主动控制在航空航天、土木建筑、车辆工程及机械工程等领域得到了广泛应用,有众多学者对振动主动控制进行了大量研究[1-4]。振动主动控制具有控制效果较好、适应性较强、控制精度高、控制频域宽、在采用反馈控制时能适应随机的外界干扰和系统参数的不确定性、以及对被控对象的结构改动不大等优点,是一种很有前途的振动控制方法。因此,对该技术进行深入研究有着重要的理论和实际意义[5-6]。
作动器是实施振动主动控制的关键部件,其作用是按照确定的控制规律对控制对象施加控制力。本文针对目前常用的压电薄膜作动器、压电陶瓷作动器、磁致伸缩作动器、惯性作动器等[7-9]价格相对昂贵、型号较少等缺点,采用扬声器代替惯性作动器作为控制系统中的控制器。扬声器具有结构简单牢固、成本低、耐用性强等特点。
建立基于扬声器的惯性作动器模型,对扬声器模型在结构振动主动控制中进行可行性分析,应用扬声器、功率放大器、加速度传感器、积分电路、信号发生器等建立振动主动控制实验系统,采用单频率信号激励悬臂梁振动进行实验,通过实验验证扬声器作为惯性作动器在结构振动主动控制中的可行性。
1 基于扬声器的惯性作动器模型
采用的扬声器为动圈式扬声器,又称电动式扬声器,本文所用的扬声器物理参数如表1所示,结构简图如图1所示,在纸盆表面连接一个连杆,把纸盆的振动通过连杆以力的形式传递到振动结构表面,用于振动主动控制。

表1 扬声器物理参数

图1 扬声器结构简图
把基于扬声器的惯性作动器看作一个质量弹簧阻尼系统[10],如图2所示,其动力学方程为:
MsX··+CsX·+KsX=Bl·I
(1)
其中Ms、Rs、Ks分别是扬声器的移动质量、阻尼、刚度,Bl为力常数,I为输入电流。
从图2可以发现,扬声器传递给结构的力Fc:
Fc=-CsX·-KsX+Bl·I
(2)
扬声器的电磁感应表达式为:
LeI ·+ReI=Vin-Bl·X·
(3)
其中,L 为电感,R为电阻,Vin为输入到音圈的电压。
联立方程(1)(2)(3)式,使用阻抗形式表示可得输入电压Vin和输出力Fc之间的传递函数:
FcVin=BlZeZmZm+Zs+(Bl)2Ze
(4)
其中:Ze=Re+jωLe;Zm=jωMs;Zs=Cs+Ksjω。
由式(4)可以得出扬声器系统的频率响应函数曲线如图3所示。

图2 扬声器力学模型
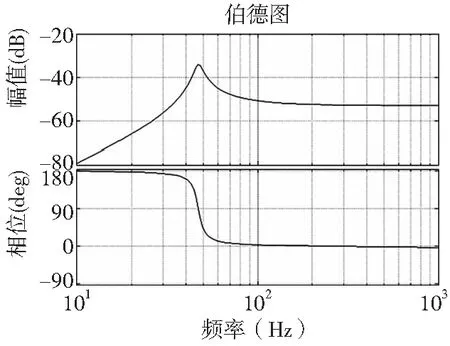
图3 惯性作动器系统频率响应函数
根据扬声器系统的频率响应曲线可知,被控物体的振动频率应当高于扬声器的固有频率,否则在控制中可能会出现失稳。将扬声器安装在一个单自由度振动结构中,固有频率为ωa大于扬声器的固有频率ωs,整个系统可以看作是一个二自由度振动系统,其力学模型如图4所示,结合图2扬声器力学模型,在外加干扰力Fd的作用下,系统动力学方程为:
MsX··+Cs(X·-X·a)+Ks(X-Xa)=-Fc
(5)
MaX··a+CaX·a+KaXa-Cs(X·-X·a)-Ks(X-Xa)=Fd+Fc
(6)
采用直接速度反馈控制[11]:
Vin=-GainX·
(7)
式中Gain表示增益。
把式(4)和式(7)代入式(5)、(6),整理后可得:
Ma0
0MsX··a
X··+Ca+Cs+α-Cs
-Cs-αCsX·a
X·+
Ka+Ks-Ks
-KsKsXa
X=1
0 Fd
(8)
其中α为反馈系数:
α=-Gain·BlZeZmZm+Zs+(Bl)2Ze
(9)
由上式可以看出控制效果主要由反馈系数决定,图5给出了不同反馈系数下的控制效果,由图可以看出反馈系数越大控制效果越好,但是在扬声器固有频率处会出现共振,共振峰值随反馈系数的增大而增大。所以,控制的时候要选取适当的增益来达到最好的控制效果。

图4 扬声器安装在单自由度振动结构上的力学模型

实线—控制前;虚线—不同反馈系数下控制图5 系统频率响应
2 基于扬声器的振动主动控制系统
为了进一步验证本文方法,我们进行了实验验证。主动控制系统实验示意图如图6所示,我们通过扬声器(物理参数如表1所示)设计了两个惯性作动器,其中一个作为激励源,另一个作为控制源。首先通过阻抗头测量了扬声器输入电压与输出力之间的频率响应函数,如图7所示。可以发现扬声器的固有频率在46.9Hz,这与理论分析结果(见图3)相符合,注意到扬声器的幅值大于90Hz时基本保存不变,并且相位保持在0°左右,所以该扬声器的有效控制频率范围为90~500Hz。实验测得控制系统的Nyquist图如图8所示,由图可以看出整个图形位于点(-1,0)的右侧,当增益不断增大时,系统将会出现失稳。

(a)实验框图
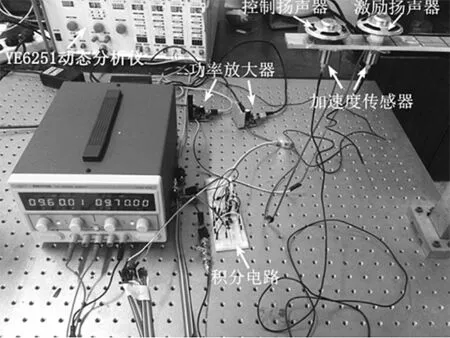
(b)实验实物图图6 主动控制系统实验示意图
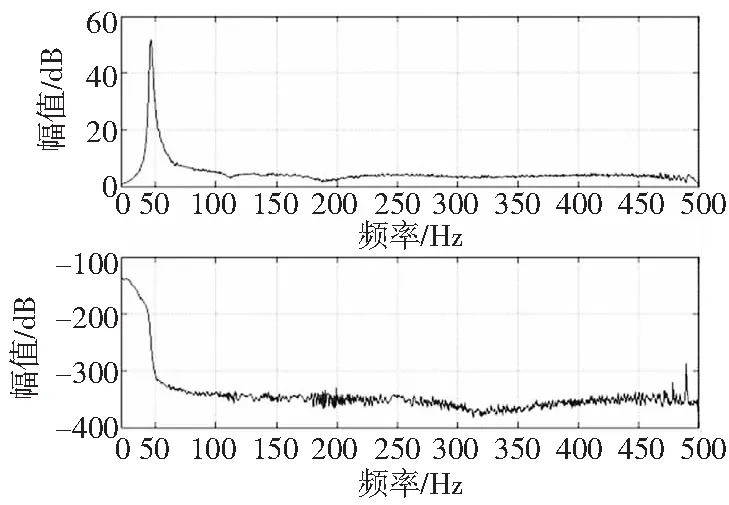
图7 扬声器的幅相特性曲线

图8 控制系统Nyquist图
实验选用第二阶固有频率为203Hz的悬臂梁作为控制对象,通过信号发生器产生扰动信号,扰动信号采用单频激励,该信号经过功率放大器放大后输入到激振扬声器中,激振扬声器运动激励悬臂梁振动,采用CA-YD-186压电式加速度传感器采集悬臂梁的振动信号,运用直接速度反馈控制策略,将采集到的加速度振动信号通过积分电路,对加速度信号进行处理后通过功率放大器反馈到控制扬声器中,控制扬声器对悬臂梁振动进行控制,通过YE6251动态分析仪采集信号至计算机。
图9给出了控制点的加速度时域响应曲线,可以看出,当控制开始后振动很快衰减,控制达到稳定后振动水平降低了70%。图10给出了系统频率响应曲线,实线表示控制前的频率响应,虚线表示控制后的频率响应,由图可以看出,峰值明显下降,但是在低频时出现了扰动,这与理论分析结果(见图5)相符合。

图9 单频激励控制点的加速度响应

实线—控制前;虚线—控制后图10 系统频率响应
3 结论
对悬臂梁单自由度结构,以测量点的加速度响应为控制目标,运用直接速度反馈控制,采用扬声器作为惯性作动器对结构振动主动控制进行了实验研究。实验结果表明,单频激励的振动控制效果达70%,且控制响应时间快,控制效果明显,这说明以扬声器作为惯性作动器应用于结构主动控制中是可行的,扬声器可代替现在常用的作动器应用于结构振动主动控制中,实现振动主动控制。
[1] N Fallah, M Ebrahimnejad. Active control of building structures using piezoelectric actuators[J]. Applied Soft Computing Journal,2013,13(1):326-339.
[2] 赵卫强,刘永贤,鲁墨武.某航空发动机压气机轮盘振动特性研究[J]. 组合机床与自动化加工技术,2009(2):24-26.
[3] Shin Changjoo,Hong Chinsuk,Jeong Weui Bong. Active vibration control of beams using filtered-velocity feedback controllers with moment pair actuators [J]. Journal of Sound and Vibration,2013,332(12):2910-2922.
[4] S Kapuria,M Yaqoob Yasin.Active vi-bration control of smart plates using direction-al actuation and sensing capability of piezoele-ctric composites[J]. Acta Mechanica,2013,224(6):1185-1199.
[5] 陈荣梅.基于电磁作动器的悬臂梁振动主动控制系统模型确认研究[D].南京:南京航空航天大学, 2014.
[6] 张定. 基于电磁作动器的柔性体振动主动控制仿真及试验研究[D].南京:南京航空航天大学,2013.
[7] 王震. 基于惯性作动器的管路系统振动主动控制研究[D].北京:中国舰船研究院,2014.
[8] Stanislaw Pietrzko, Qibo Mao. Noise reduction in a duct using passive/semi-active shunt loudspeakers[C]. 16th International Congress on Sound and Vibration 2009 (ICSV16),2009.
[9] G Zhaoa,N Alujevic′a,B Depraetereb,et al.Experimental study on active structural acoustic control of rotating machinery using rotating piezo-based inertial actuators[J]. Journal of Sound and Vibration,2015,15-30.
[10] Mao Q, Pietrzko S. Control of Noise and Structural Vibration [M]. Springer, 2013.
[11] J Rohlfinga, P Gardoniob, D J Thompsona.Comparison of decentralized velocity feedback control for thin homogeneous and stiff sandwich panels using electrodynamic proof-mass actuators [J]. Journal of Sound and Vibration, 2011,330(5):843-867.
(编辑 李秀敏)
Research on Active Vibration Control by Using Loudspeakers as Inertial Actuators
LIU Jian,MAO Qi-bo
(School of Aircraft Engineering, Nanchang Hangkong University, Nanchang 330063, China)
The loudspeaker is normally used for sound field excitation. In this paper, the loudspeaker is used as inertial actuator for active vibration control approach. And this method can be applied to engineering applications. First, the model of the inertial actuators based on the loudspeaker is established. Then the control performance of the proposed inertial actuator is presented. To further investigate the proposed method, design of active vibration control experiment system, and use direct velocity feedback control strategy for the experiment. The theoretical calculation and experimental results show that the loudspeakers can be used as inertial actuators for active vibration control approach.
loudspeaker; inertial actuators; direct velocity feedback; structural vibration; active vibration control
1001-2265(2016)12-0085-03
10.13462/j.cnki.mmtamt.2016.12.023
2016-03-01;
2016-04-09
国家自然基金项目(51265037,11464031);航空科学基金项目(2015ZA56002);江西省高等学校科技落地计划资助项目(KJLD12075);江西省研究生创新基金项目(YC2015S326)
刘健(1992—),男,江西赣州人,南昌航空大学硕士研究生,研究方向为振动主动控制,(E-mail)841458386@qq.com。
TH166;TG659
A