MIMO-SAR线性合成阵列模式及性能研究∗
2016-01-10王力宝王党卫
谢 超,王力宝,王党卫,汪 枫,王 玲
(1.空军预警学院,湖北武汉430019;2.国防科技大学,湖南长沙410073)
0 引言
由于传统SAR采用单通道发射波形信号,使其在单次快拍形成的虚拟阵元数目受限于接收通道数目,限制了系统自由度,使得方位向分辨率、测绘带宽度,以及运动目标检测与成像等功能指标难以同时提升及实现[1]。通过将MIMO雷达与SAR技术相结合,可形成远多于实际收发阵元数的等效通道,使得MIMO-SAR系统具备灵活多变的工作模式[2]。
实际上,为充分发挥MIMO-SAR系统的探测性能,人们已经开展了对MIMO-SAR阵列模型与性能的研究。2008年,Krieger研究了适用于宽测绘带静态场景成像的信号发射波形问题[3];2009年,文献[4]提出了适用于MIMO-SAR的宽测绘带静态场景成像方法;2010年,文献[5]将相控阵天线与MIMO-SAR系统相结合,设计了DBFMIMO-SAR系统,以解决距离模糊问题;同年,文献[6]针对运动目标检测问题,建立了 MIMO SAR/GMTI系统模型;2011年,文献[7]提出了一种基于空时等效重构的MIMO-SAR系统,从而实现远距离、高分辨率、宽测绘带成像;2014年,文献[8]将MIMO-SAR系统接收的信号进行重构,从而利用高系统自由度进行宽测绘带成像。
虽然以上文献从多方面验证了MIMO技术对SAR系统性能带来的提升,但均局限于阵列模型在特定应用背景下的应用,没有考虑阵列模式之间的相互联系,同时也缺乏对不同阵列模式带来的系统得益的综合讨论。鉴于此,本文依据不同的时间串行采样方式,构建出适用于不同应用背景的阵列模式,通过对不同阵列模式性能的分析,验证本文对MIMO-SAR阵列构型方法的有效性。
1 MIMO-SAR线性阵列模式
相比传统SAR雷达和现有单次快拍MIMO雷达[9],MIMO-SAR的工作模式更为复杂,其等效阵列是一种同时蕴含空间并行和时间串行两种采样模式的混合采样模式。基于该混合采样模式,MIMO-SAR一方面可利用收/发天线结构进行单次快拍空间并行采样,在同一时间获得远多于传统SAR系统的空间采样数;另一方面又可通过控制系统脉冲重复频率(PRF)进行时间串行采样,灵活调整在同一空间位置获得不同时间的采样数,从而扩展了MIMO-SAR的应用背景。
1.1 MIMO-SAR单次快拍阵列
为说明MIMO-SAR与传统多通道SAR(SIMO-SAR)的阵列区别,图1给出了不同系统的等效采样阵元示意图。假设系统具有相同的接收阵列矢量,以及不同的发射阵列矢量。图1(a)为一发四收SIMO-SAR系统,形成了与接收阵元数相同的等效采样阵元数,并且等效阵列长度小于接收阵列的物理长度。对图1(b)的MIMO-SAR系统而言,由于增加了一个发射矢量,使得系统在单次快拍中获得了更多的等效阵元数。同时,进一步增加发射阵元矢量,可以使等效阵列长度突破接收阵列物理长度的限制,如图1(c)所示。
从图1可以看出,系统中发射与接收阵元的相对坐标位置决定了单次快拍形成的空间并行采样方式。考虑到等效阵列的慢时间空间采样位置将随vatm发生改变,其中va为平台飞行速度,tm为慢时间尺度参数。通过改变慢时间tm对应的PRF可使得MIMO-SAR空间并行和时间串行采样形成的等效阵列在不同慢时间获得同一空间位置的采样次数存在差异。为此,有必要进一步分析不同时间串行采样方式带来的系统得益。

图1 不同SAR系统等效采样阵元示意图
1.2 MIMO-SAR阵列模式
为了对比的充分性,本文依据系统PRF取值的大小,将MIMO-SAR阵列模式分为低PRF阵列模式、中PRF阵列模式和高PRF阵列模式。
1.2.1 低PRF阵列模式
若设MIMO-SAR平台匀速飞行,真实阵列沿飞行方向直线部署,令单次快拍空间并行采样形成的等效阵列长度为LT=(N-1)d(d为等效阵元间距,N为等效阵元数),则该系统取为

式中,va为载机飞行速度。
此时,MIMO-SAR单次快拍期间可同时获得N个采样。随着平台的运动,各脉冲获得的N个采样将以Nd为间隔进行空间位置平移,且相邻两个脉冲空间采样位置间距为d,即等效阵元空间采样位置不发生重叠现象。图2给出了包含6个等效阵元的低PRF阵列模式多脉冲采样示意图。由图2可以看出,该阵列模式下,MIMO-SAR系统将单次快拍期间全部的空间并行采样用于填充低PRF下慢时间维的缺失采样。
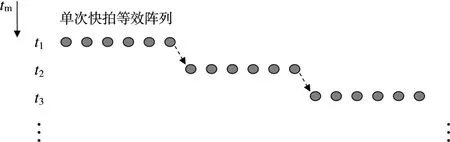
图2 低PRF阵列模式多脉冲采样示意图
若设第一次快拍的慢时间起始时刻t1=0,则MIMO-SAR经M次快拍形成的合成阵列总长度可表示为

特别地,当LT≪MNd,LT可忽略不计,M次快拍形成的合成阵列总长度可近似为

即主要取决于快拍数与单次快拍等效阵列的参数。
同时,按照文献[1]的雷达成像理论,若设系统发射信号载频波长λ,则该阵列模式下MIMO-SAR理论方位向分辨率可表示为

式中,R为目标中心至平台的径向距离,ΔθBW为合成孔径期间目标相对雷达的观测转角。
另一方面,对于传统单通道SAR而言,其合成阵列主要利用慢时间tm维的空间采样来实现。因此,为了形成与低PRF阵列模式MIMO-SAR相同的合成阵列,则其脉冲重复频率fr必须取为

需要的快拍数可表示为

很明显,要形成与低PRF阵列模式MIMOSAR相同的合成阵列,传统SAR的PRF需提高N倍。换句话说,相对于传统SAR,低PRF阵列模式MIMO-SAR使用单次快拍所产生的N个空间采样取代了传统SAR的N个慢时间采样,虽然PRF降低,但仍可获得与传统SAR相同的合成阵列。
1.2.2 中PRF阵列模式
基于前文低PRF阵列模式参数,中PRF阵列模式将N个等效阵元划分为L M个子阵,并且每个子阵包含L N个采样阵元数,即满足N=L N×L M。可得中PRF阵列模式下,PRF需满足

由于L N小于N,因此,该模式下MIMO-SAR的PRF将高于低PRF阵列模式的PRF。同时,随着平台的运动,N个等效阵元多脉冲采样的空间位置将出现重叠,且重叠率为L M,即每个空间采样位置处中PRF阵列模式MIMO-SAR可形成L M个等效通道。图3给出了包含6个等效阵元的中PRF阵列模式多脉冲采样示意图,其中6个等效阵元划分为两组。很明显,由图3可以看出,从第2个脉冲后,不同组内的3个等效阵元均在同一位置实现2次采样,等效形成2个通道。

图3 中PRF阵列模式多脉冲采样示意图
若进一步设第一次快拍的慢时间起始时刻t1=0,则该模式下MIMO-SAR经M次快拍形成的合成阵列总长度可近似表示为

即与快拍数和分组后组内阵元数的乘积成正比。
相应地,这种阵列模式下MIMO-SAR理论方位向分辨率可表示为

这表明为了形成与低PRF阵列模式相同的合成阵列,中PRF阵列模式MIMO-SAR必须增大快拍数M。此外,相对于传统SAR,中PRF阵列模式MIMO-SAR单次快拍所产生的N个空间采样在多脉冲采样中仅取代了传统SAR的L N个慢时间采样,但每个阵元同一空间位置采样数更多,是传统SAR和低PRF阵列模式的L M倍。
1.2.3 高PRF阵列模式
通过前文给出的两种不同的阵列模式可以看出,改变MIMO-SAR的PRF能改变等效阵元多脉冲空间采样位置以及多脉冲下空间采样位置的重叠程度。事实上,如果将MIMO-SAR的等效阵元分组数增加至N时,即每组仅包含一个等效采样阵元,此时系统脉冲重复频率应满足

可以看出,该阵列模式的PRF与传统单通道SAR相同。在该阵列模式下,N个等效阵元在多脉冲采样的空间位置重叠率将达到N,即每个空间采样位置处MIMO-SAR可形成N个等效通道。图4给出了包含6个等效阵元的高PRF阵列模式多脉冲采样示意图,其中6个等效阵元划分为6组。很明显,图中系统从第6个脉冲开始,不同组的等效阵元在同一位置均实现了6次重叠的空间采样,即等效形成了6个通道。
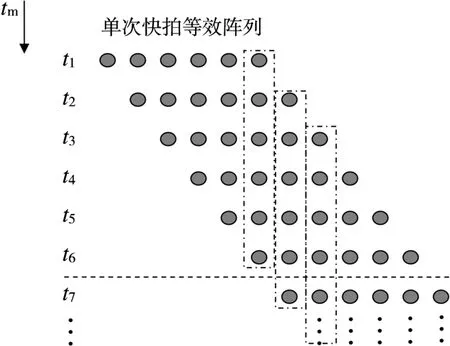
图4 高PRF阵列模式多脉冲采样示意图
类似地,若设第一次快拍的慢时间起始时刻t1=0,则该阵列模式下经M次快拍形成的合成阵列总长度可近似表示为

即与快拍数成正比。这也说明要形成与低PRF阵列模式相同的合成长度,所需的快拍数需提高N倍,与传统单通道SAR的情况类似。
2 系统性能分析
通过改变系统脉冲重复频率可得到不同的MIMO-SAR阵列模式,本节进一步分析阵列模式对MIMO-SAR系统的最大不模糊距离、测绘带宽度,以及杂波抑制等性能指标的影响。
2.1 最大不模糊距离
由于雷达系统的最大不模糊距离主要取决于脉冲重复周期,根据上节所得的系统PRF值,不同阵列模式对应的理论最大不模糊距离可分别表示为
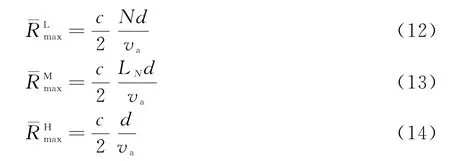
很明显,由上述表达式可以看出,高PRF阵列模式下MIMO-SAR不模糊距离最小,其与传统SAR相同;低PRF阵列模式下系统的不模糊距离最大,是传统SAR的N倍;中PRF阵列模式下系统的不模糊距离则介于前两种阵列模式之间,是传统SAR的L N倍,具体数值与阵列分割方式有关。
2.2 测绘带宽度
由文献[10]可知,为了使测绘带中所有散射点的回波均在同一脉冲重复时间内到达SAR雷达,不模糊测绘带宽度与重复频率fr需满足约束关系:

式中,W为测绘带的宽度,θ为雷达下视角。
进一步将阵列模式的PRF表达式代入式(15)可分别得到测绘带宽度约束关系:
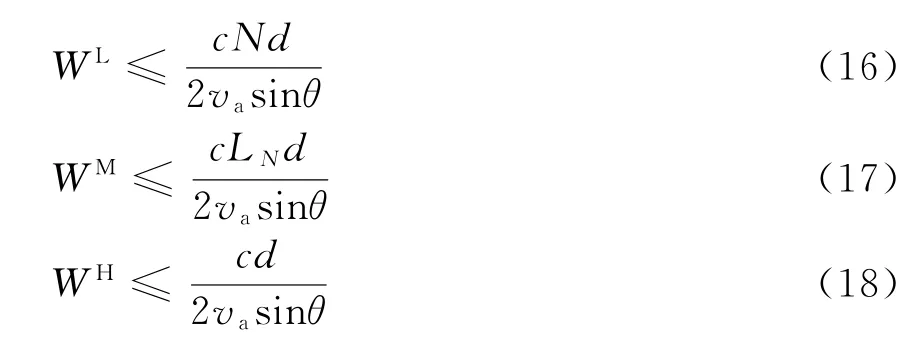
很明显,由式(16)~式(18)可以看出,3种阵列模式中低PRF阵列模式MIMO-SAR可获得的不模糊测绘带最宽,中PRF阵列模式次之,而高PRF阵列模式最窄。
2.3 杂波抑制性能
DPCA是一种经典的运动平台杂波抑制技术,其中两脉冲DPCA滤波特性满足[11]

式中 ,fd=cosψ2va/λ,ψ为目标与阵列的视线夹角。
为了达到消除杂波的目的,要求HS,T(fd,ψ)=0,则式(19)中存在:

进一步将DPCA的条件公式d=va/fr代入,可得

根据DPCA技术原理,当式(21)所示滤波器斜率正好与杂波分布线重合,即d=va/fr时可有效抑制杂波,但当这一条件不能满足杂波抑制性能将变差。因此,将该特性用于MIMO-SAR阵列模式的杂波抑制性能比较。当低PRF阵列模式满足时,将其代入式(19)可得

可求得低PRF阵列模式的对消滤波器斜率为

同理,分别可得高PRF阵列模式和中PRF阵列模式时的滤波器斜率为

由式(23)~式(25)可以看出,低PRF阵列模式构成的滤波器斜率不与杂波分布线重合,其杂波抑制性能最差。而中、高PRF阵列模式均可形成与杂波分布线相同的滤波器斜率,从而可有效滤除杂波。但要指出的是,在中PRF阵列模式中,受空间通道重构的影响,运动目标回波多普勒历程与高PRF阵列模式中运动目标多普勒历程存在差异[12]。这种差异性会改变运动目标的导向矢量,从而影响传统STAP处理的性能[13]。因此,中PRF阵列模式应首先对回波数据进行杂波抑制,再估计出目标的运动参数,然后根据估计值对目标运动产生的多普勒项进行补偿,最后进行目标积累检测。
3 仿真实验与结果分析
为了测试本文对MIMO-SAR阵列模式及系统性能分析的正确性,设MIMO-SAR工作波长λ=0.03 m,系统发射信号带宽为150 MHz,发射阵列和接收阵列沿航向直线部署,发射阵列阵元数为2,接收阵元数为3,单次快拍获得的等效阵列长度为5 m、等效阵元数为6。
3.1 最大不模糊距离与测绘带分析
为了对比分析3种阵列模式下MIMO-SAR的最大不模糊距离,首先设定系统方位向分辨率ρa=2 m,图5(a)给出了不同平台速度时3种模式下的系统最大不模糊距离变化曲线。可以看出,随着va的增大,MIMO-SAR系统的最大不模糊探测距离随之减小,但低PRF阵列MIMO-SAR最大不模糊距离明显大于其他两种MIMO-SAR阵列模式,如va=7 000 m/s时,低PRF MIMOSAR阵列可实现257 km的最大不模糊探测距离,中PRF MIMO-SAR阵列为171 km,高PRF MIMO-SAR阵列仅为43 km。
同时,设定平台速度为7 000 m/s,改变系统方位向分辨率并选择合适的阵元间距使得方位向成像无模糊,获得的方位成像分辨率与最大不模糊距离之间的关系如图5(b)所示。从图中可看出,随着方位分辨率的提高,系统方位向无模糊成像所需的方位采样间隔随之变小,这使得3种阵列模式MIMO-SAR最大不模糊距离均随之降低。然而,低PRF阵列模式MIMO-SAR最大不模糊距离仍然明显高于其他两种阵列模式,并且其具有最佳的测绘带宽度。
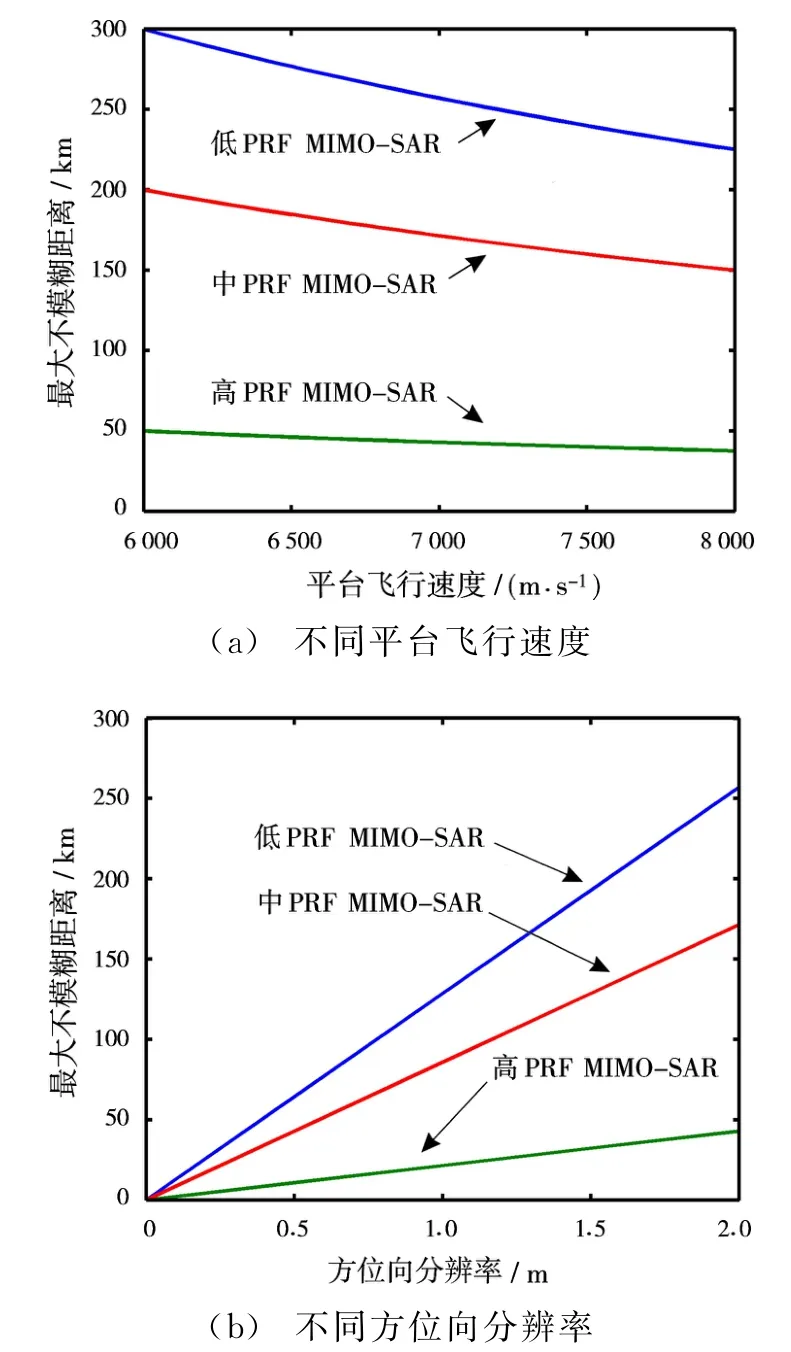
图5 3种阵列模式MIMO-SAR雷达最大不模糊距离曲线
3.2 杂波抑制性能分析
为了对比分析不同PRF下MIMO-SAR阵列模式的杂波抑制性能,假设目标垂直航线的速度为10 m/s。同时,仿真产生包络服从瑞利分布、目标与杂波功率的信杂比SCR为-5 dB、系统输出端杂噪比CNR为40 dB的杂波,分别叠加于不同阵列模式等效阵元接收的运动目标回波。
图6给出了不同系统采用两脉冲DPCA技术的杂波抑制能力比较图。图6(a)为第一个等效通道一次脉冲的接收回波幅度图,可以看出,由于杂波幅度较强,淹没了图中的运动目标,使其难以被发现;图6(b)为采用低PRF MIMO-SAR阵列模式的杂波抑制效果,由于只具备一个等效通道,其滤波器斜率不与杂波分布线重合,以致对消处理后图中剩余杂波的幅度仍然很强,不易发现运动目标所在距离门;图6(c)为采用高PRF阵列模式的杂波抑制效果,通过将第一个等效通道与第二个等效通道的回波信号进行对消处理,结果显示杂波已被有效滤除,可以清晰发现运动目标所在的距离门;图6(d)为采用中PRF阵列模式的杂波抑制效果,该系统具有两个等效通道,将其进行DPCA处理后,结果显示杂波也被有效滤除。
考虑到高PRF阵列模式与中PRF阵列模式相比,其优势在于能获得更多的等效通道。为进一步对比不同阵列模式导致的等效通道数差别对两脉冲DPCA杂波抑制效果的影响,图7利用改善因子(Improvement Factor,IF)来衡量杂波抑制的性能。由于高PRF阵列模式中等效通道数目为6,中PRF阵列模式中等效通道数目为2,从图中可以看出,高PRF阵列式杂波抑制性能最好,其次是中PRF阵列模式。此外,由于低PRF阵列模式的等效通道数为1,不具备空间滤波的能力,因此杂波抑制性能较低。
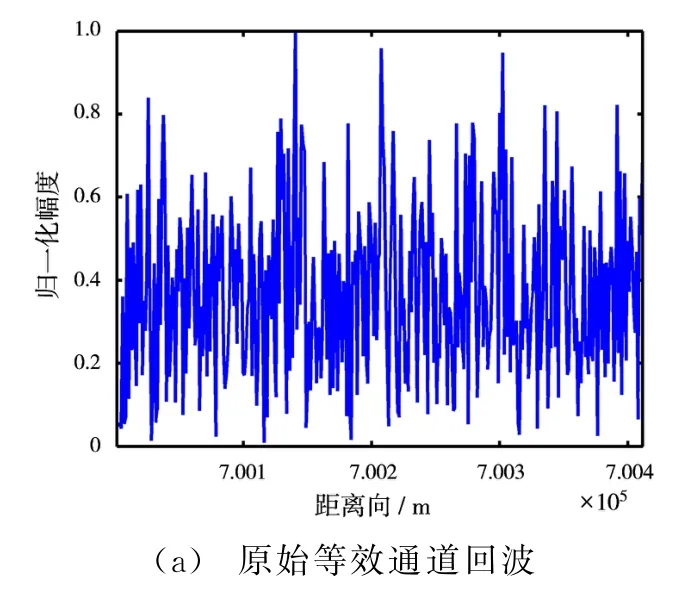
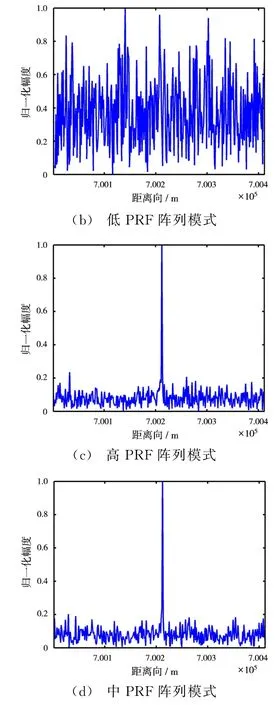
图6 DPCA抑制效果比较图
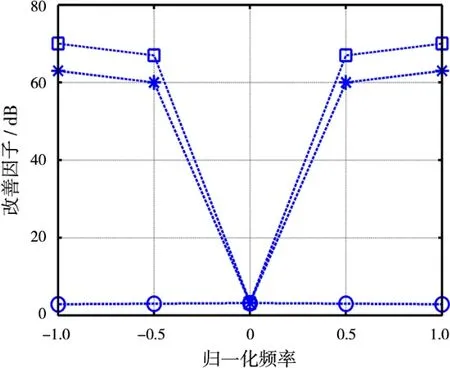
图7 系统改善因子的比较图(ο为低PRF MIMO-SAR,∗为中PRF MIMO-SAR,□为高PRF MIMO-SAR)
4 结束语
不同于传统SAR系统,MIMO-SAR同时蕴含空间并行和时间串行两种采样模式,阵列构型更为灵活。特别地,不同的时间串行采样方式对应了不同的MIMO-SAR阵列模式。本文通过对比分析不同阵列模式的性能指标,为指导构建适用于不同应用背景的MIMO-SAR阵列构型及阵列参数的选择提供了依据。
[1]保铮,邢孟道,王彤.雷达成像技术[M].北京:电子工业出版社,2005.
[2]WANG J,LIANG X D,DING C B,et al.A Novel Scheme for Ambiguous Energy Suppression in MIMO-SAR Systems[J].IEEE Geoscience and Remote Sensing Letters,2015,12(2):344-348.
[3]KRIEGER G,GEBERT N,MOREIRA A.Multidimensional Waveform Encoding:A New Digital Beamforming Technique for Synthetic Aperture Radar Remote Sensing[J].IEEE Trans on Geoscience and Remote Sensing,2008,46(1):31-46.
[4]武其松,邢孟道,刘保昌,等.面阵 MIMO-SAR大测绘带成像[J].电子学报,2010,38(4):817-824.
[5]齐维孔,禹卫东,祁海明.星载MIMO-SAR与距离向DBF相结合系统研究[J].电子学报,2010,38(10):2251-2257.
[6]张晓光,刘祥峰,付琨.基于MIMO-SAR体制的空频域自适应动目标检测技术研究[J].电子与信息学报,2010,32(8):1997-2001.
[7]孙龙,江凯,邬伯才,等.一种新的 MIMO SAR/MTI空时等效重构方法[J].雷达科学与技术,2011,9(2):120-124.
[8]CERUTTI-MAORI D,SIKANETA I,KLARE J,et al.MIMO SAR Processing for Multichannel High-Resolution Wide-Swath Radars[J].IEEE Trans on Geoscience and Remote Sensing,2014,52(8):5034-5055.
[9]WANG Dangwei,MA Xiaoyan,CHEN A L,et al.High-Resolution Imaging Using a Wideband MIMO Radar System with Two Distributed Arrays[J].IEEE Trans on Image Processing,2010,19(5):1280-1289.
[10]张澄波.综合孔径雷达:原理、系统分析与应用[M].北京:科学出版社,1989.
[11]RANEY R K.Synthetic Aperture Imaging Radar and Moving Targets[J].IEEE Trans on Aerospace and Electronic Systems,1971,7(3):499-505.
[12]谢超,王力宝,王党卫,等.宽测绘带 MIMO-SAR运动目标回波特性分析[J].红外与激光工程,2014,43(9):2860-2866.
[13]贾琼琼,吴仁彪,李海.基于修正STAP的高速空中机动目标检测方法[J].数据采集与处理,2013,28(2):219-225.
