基于统计概率的接收机网络多目标定位∗
2016-01-10
(电子科技大学电子工程学院,四川成都611731)
0 引言
多目标定位技术在军事和民用领域都有着十分广泛的应用,如军事方面包括空中预警、空中攻击(多目标攻击)等,民用方面包括空中交通管制等。
随着各国军事技术的发展,传统的单站雷达定位方法[1]已难以运用于高超声速、隐身目标等的精确定位。与传统的单站雷达探测技术相比,基于接收机网络的多目标定位系统,观测区域大、定位精度高、抗噪性强,且能提取目标的三维位置、三维速度等更为丰富的信息,更适用于对高超声速、隐身目标的定位[1]。
应用于接收机网络的常见定位算法大体可以分为两类:基于测距的定位方法和基于成像策略的定位方法。基于测距的定位方法有:基于接收信号强度(Received Signal Strength,RSS)的多目标定位,基于到达角度(Angle of Arrival,AOA)的多目标定位[2],以及基于到达时间差(Time Difference of Arrival,TDOA)的多目标定位[3]。基于成像策略的定位方法主要有回波相参法[4]和幅度积累法等[5]。
在测距定位法中,TDOA定位方法在现代技术中应用较为广泛,定位精度也较高,其根据电磁波的传播距离,建立关于目标位置的方程组,通过解算方程组可以得到各目标的坐标。但是当目标和接收机数量较多时,就需要建立大量的方程组,计算复杂度高,而且容易出现漏检、虚假目标等现象[6]。
成像定位法可以解决以上测距定位法中的问题,但存在明显不足。其中,回波相参法在接收机分布区域较广时,导致回波信号很难保持相参,成像聚焦效果较差,定位困难;幅度积累法利用回波幅度信息进行成像,在多目标存在情况下,弱目标很容易被淹没。
为了进一步提高基于成像策略多目标定位方法对弱目标的检测定位能力,本文提出了一种基于统计概率的接收机网络多目标定位方法,该方法首先计算在监测空间中目标在不同位置的存在概率,然后筛选出目标存在概率大于某一门限的数据,再计算接收机间的联合概率密度函数,在计算联合概率函数的过程中使用了成像策略,成像空间中某点的像素值即为相应位置处的联合概率密度值。通过寻找联合概率密度值较大的点,可以有效地对目标包括弱目标进行定位。
1 基于TDOA的多目标定位
接收机网络模型如图1所示。
传统的接收机网络TDOA定位[7]需建立式(1)方程组:
式中:发射源为参考点,x为目标位置;r i为第i个接收机位置;R i为第i个接收机的双站距离。
理论上能够对式(1)解算出目标的位置[8],但实际上,接收机网络必须在定位前将不同目标的混合延时与方程进行组合匹配,建立关于目标位置的方程组,即解决数据关联问题[6]。该方法在接收机和目标数目较多时需要建立大量的方程组,导致计算复杂度高,解算过程可能不收敛,更易产生虚假目标等问题。
2 基于成像策略的多目标定位
接收机网络能够被看作具有二维空间分辨率的天线阵列,利用这些天线阵列结合回波距离向分辨率可以对目标进行三维成像。本文采用后向投影(Back Projection,BP)算法[9],将回波进行相位相参积累或幅度积累或其他相关信息积累投影到三维成像空间,得到相应的三维图像,通过寻找具有较大值的像素点提取目标的位置信息,实现目标的定位。
基于成像策略的多目标定位不需要建立关于目标位置的方程组,有效地避免了数据关联、解算方程组困难、解算过程不收敛等问题。
2.1 基于回波相参和幅度积累的多目标定位
假设雷达发射机的发射信号为一个单载频信号,如式(2)所示:

式中,A为信号的幅度,Tp为脉冲宽度,fc为发射信号的载频,rect(·)为窗函数。
假设接收机的数目为N,目标数目为M,那么每个接收机收到的不同目标的回波信号可以表示为
式中,X i,j(t),σi,j,R i,j,τi,j分别为第i个接收机接收到第j个目标散射的回波信号、散射系数、双站传输距离和延时,i=1,2,…,N,j=1,2,…,M。
经去载频和采样之后,得

回波相参法得到的成像结果可表示为
式中,Im(x j,y j,z j)表示投影所得的相对于目标位置的像素值,(x j,y j,z j)表示目标j的三维地理坐标。
若将信号取模,可得幅度积累法的成像结果:
得到目标的三维图像之后,通过寻找图像中具有较大值的像素点,即可检测出目标的三维位置,实现多目标定位。
然而,由于接收机天线相位的测量误差、噪声干扰以及后向散射系数(RCS)受观测角变化[1]等因素的影响,回波信号的相位并不能被准确地估计。幅度积累法中,由于不同强、弱目标的幅度变化范围很大,强、弱目标距离较近时弱目标很容易被淹没。
2.2 基于统计概率的多目标定位
本文提出了一种基于统计概率的多目标定位方法。该方法首先根据回波幅度信息计算目标在空间中存在概率密度函数,然后在每一接收处设置某一概率门限滤除低概率值的数据,以减少数据的处理量,结合BP算法原理,利用概率信息进行成像,实现对多目标的定位。
假设第i个接收机的观测值为表示第i个接收机收到的存在概率大于门限值的第j个延时,为相应的存在概率,可得

式中:i=1,2,…,N,N为接收机的数目;H1,H0分别表示目标存在与不存在。
根据贝叶斯准则有

假设噪声服从正态分布[10],则似然函数近似为

式中,σ表示噪声的标准差。

式中,与位置x相关的函数φ(·)是与系统模糊函数相关的核函数,在本文中φ(·)为一矩形函数。对第i个接收机,目标在位置x处的存在概率可以表示为

假设各接收机相互独立,则对于整个接收机网络,目标在位置x处的联合存在概率为

可以作为统计概率法成像结果中在位置x=(x,y,z)处的像素值,其中,为所有接收机收到数据的集合。
由于P(x/Ξ)分布集中在(0,1)间趋于0的范围,不易进行数据处理,对式(12)进行对数运算,使得概率信息分布在(-∞,0)一个较广的范围:

Im′(x,y,z)同样可以作为目标在位置x=(x,y,z)处的存在概率积累的像素值,类似于式(5)中相参积累和式(6)中的幅度积累的像素值。
但若第i个接收机对某一目标漏检,即,则整个接收机网络对目标在该位置的联合存在概率P(x/Ξ)也为0,相应Im′(x,y,z)为-∞,同样会造成对该目标的漏检。

式中,ε是一个很小的正数。的变化范围为0到1,即使出现漏检使得,对整个接收机网络的影响也不会很大。
对由式(14)得到目标的存在概率设一概率门限值滤除低概率的数据,然后再利用式(13)得到三维图像,即可实现定位。
基于统计概率的定位方法减少了对数据传输和处理的负担,在一定程度上抑制了噪声对多目标定位的影响,通过求取概率的方法,使弱目标也可以有效定位。
3 仿真分析
下面对基于回波相参、幅度积累和统计概率三种接收机网络多目标定位方法进行仿真对比分析,并重点分析基于幅度积累和统计概率两种多目标定位方法的定位性能。
仿真参数如表1所示。
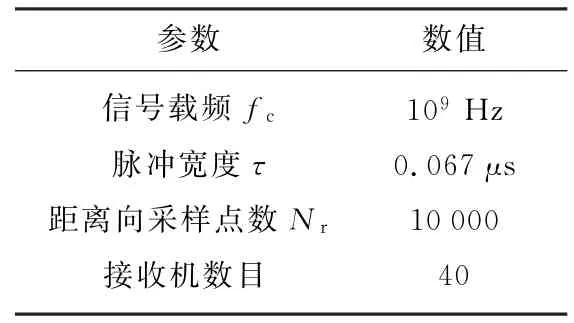
表1 仿真参数设置
如图1所示,以发射源为坐标参考系原点建立坐标系,对中心坐标为[0,0,10]km、大小为200 m×200 m×200 m的区域进行监测;根据系统距离分辨率及BP算法原理将监测区域划分为间隔为10 m的三维网格单元;接收机随机分布在距发射机50 km的范围内,并设目标对不同接收机的RCS是不同的;目标的回波中加入标准方差为0.4的复高斯白噪声;根据经验可取概率检测门限为0.4。
首先针对单目标情况,设目标的信噪比为3 dB,分别采用回波相参法、幅度积累法和统计概率法对目标进行定位,结果如图2~4所示。图中符号表示目标真实位置,符号表示定位所得目标估计位置。
为更直观地展示三维图像像素最大值,将其一维化得到空间图像像素分布。由图2(a)可知,回波相参法所得图像散焦严重,这也导致图2(b)所示的目标定位结果误差很大。原因是目标的RCS随观测角度的变化而发生变化,导致图像散焦,不能准确定位。而幅度积累法不受回波相位相参性影响,图像聚焦较好,如图3(a)所示,通过寻找像素最大值点能够较准确地定位出目标位置信息(如图3(b)所示)。采用统计概率的定位方法,同样也可达到较好的定位效果(如图4(b)所示)。
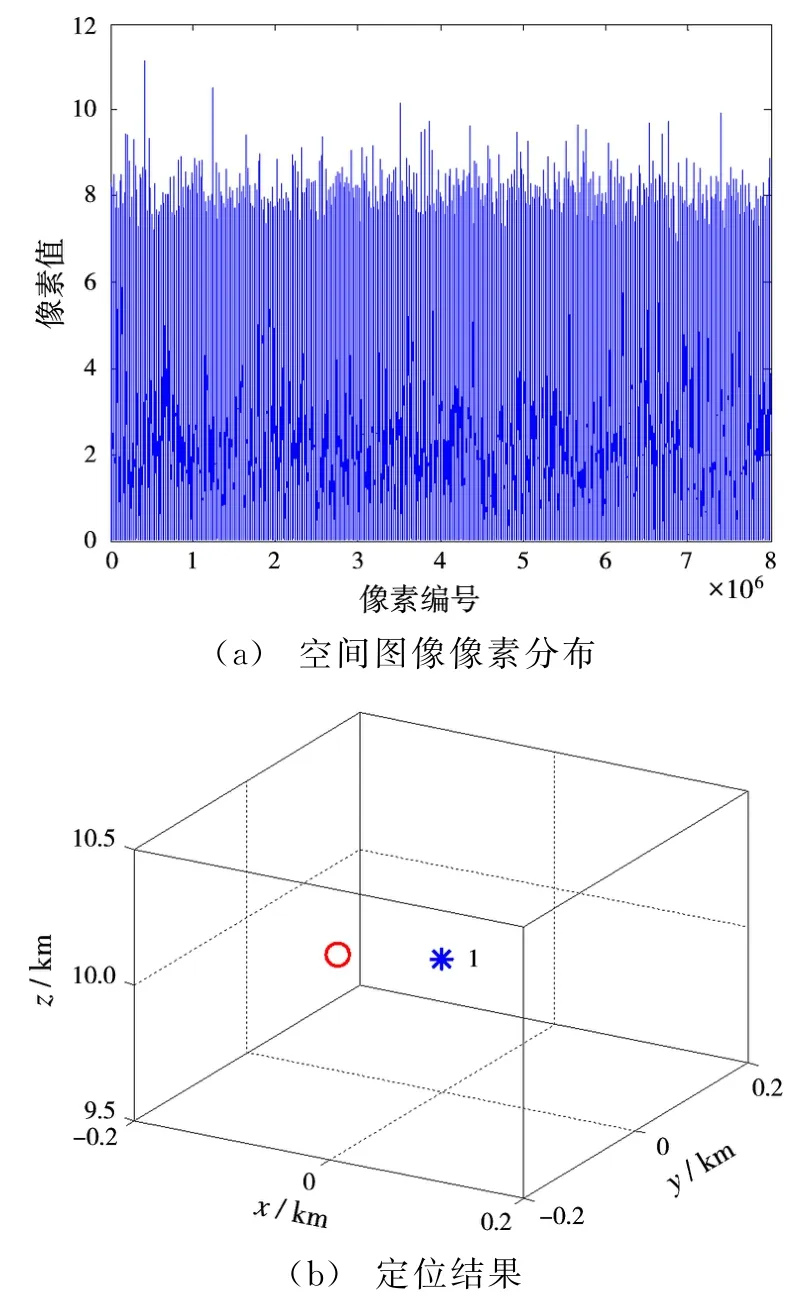
图2 回波相参法的定位结果
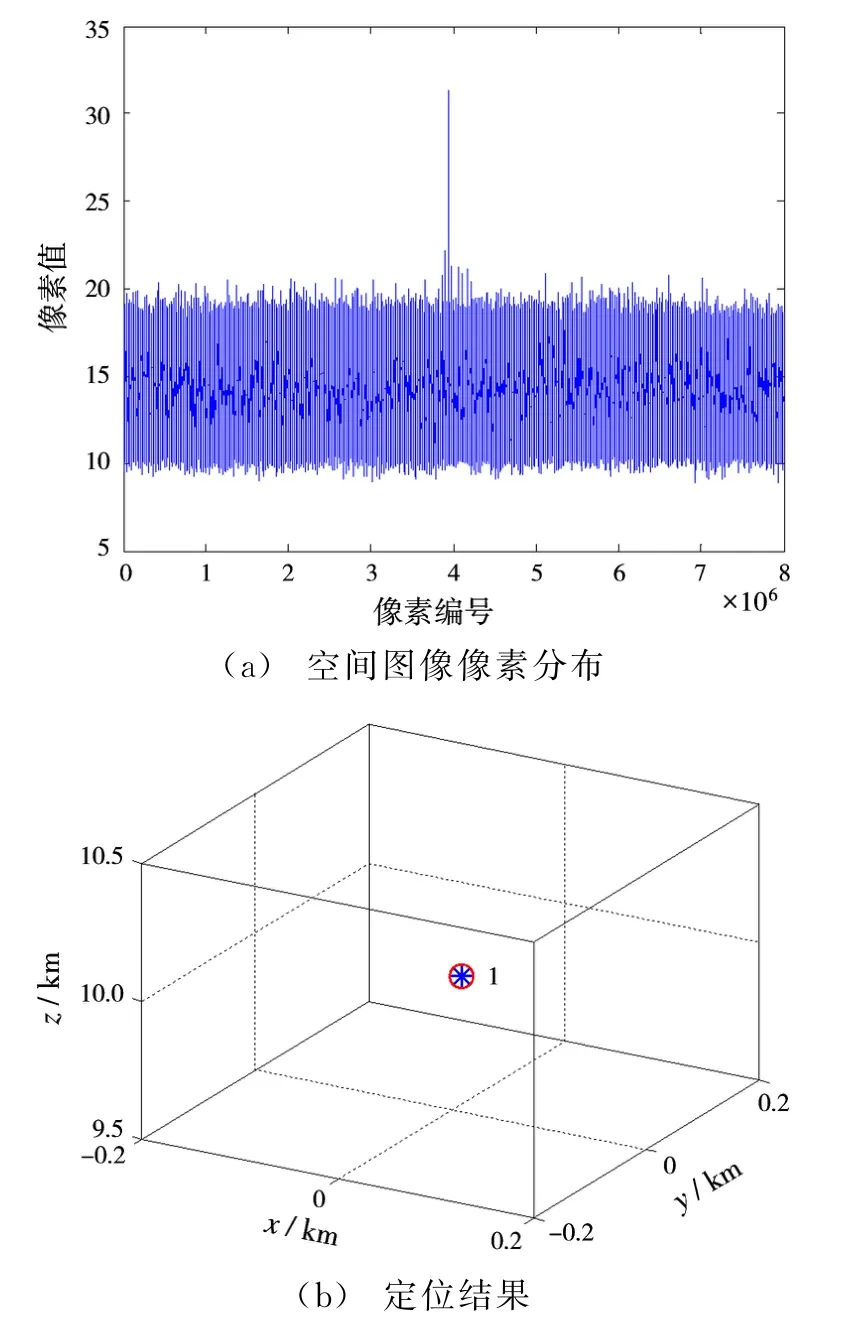
图3 幅度积累法的定位结果
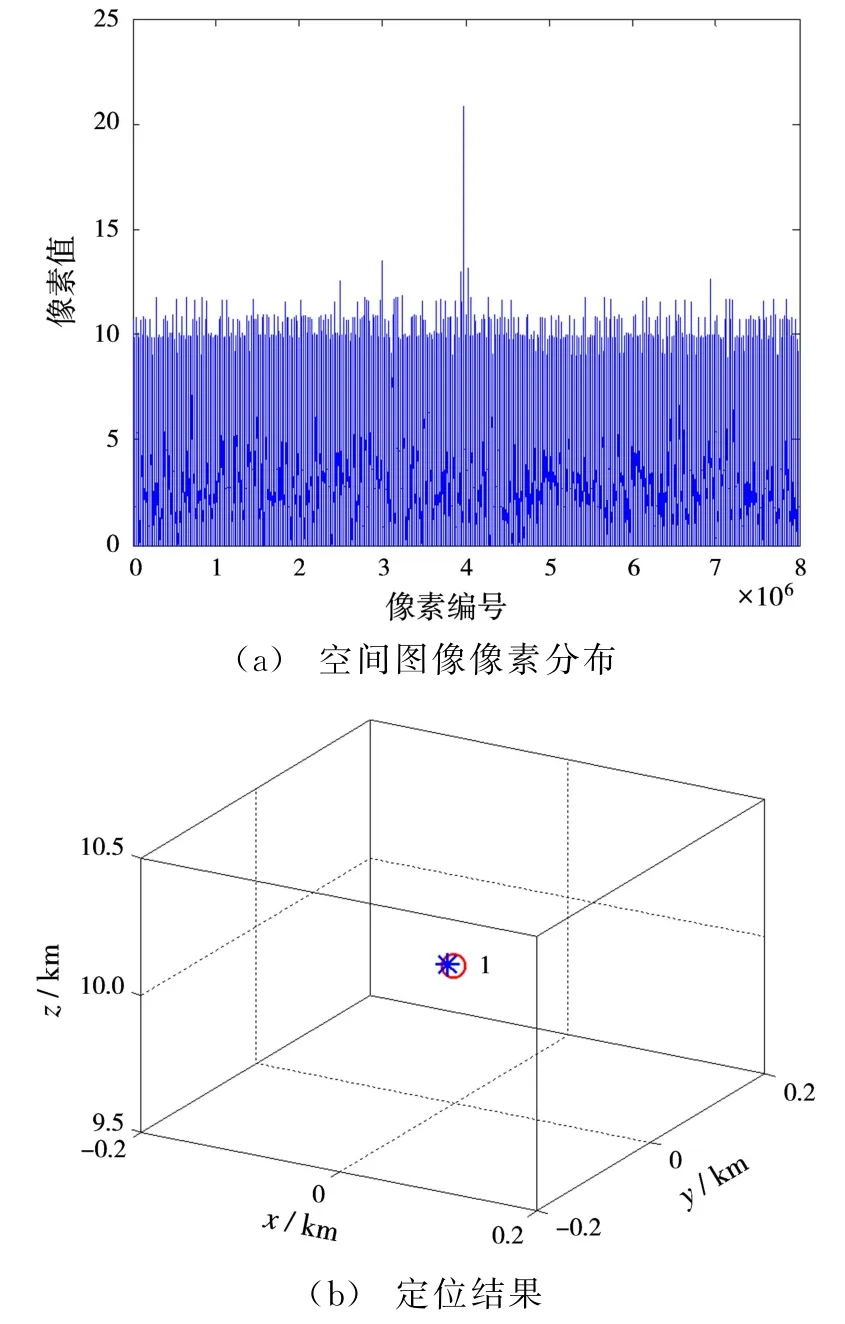
图4 统计概率法的定位结果
针对多目标情况,由于回波相参法在接收机网络中的定位效果不理想,因此只考虑幅度积累与统计概率两种定位方法。假设监测区域内随机分布有5个目标,并设信噪比分别为3,5,8,15和20 d B。两种方法的定位结果分别如图5和图6所示。图中符号表示目标真实位置,符号表示定位所得目标估计位置。
由图5(a)可知,采用幅度积累法所成三维图像聚焦效果较差,且只可以分辨出强目标4和5,弱目标1,2,3被强目标所淹没,无法分辨;图5(b)中,受强目标影响,定位时只能定位出目标5。而在图6(a)中,采用统计概率的方法各目标聚焦效果较好,弱目标受强目标影响较小,不易被强目标所淹没;图6(b)中,5个目标都能够较为准确地定位。
为了定量地比较上述两种多目标定位方法的定位性能,仿真进行了50次重复实验,分别计算两种方法的定位结果的平均误差,结果如表2所示。
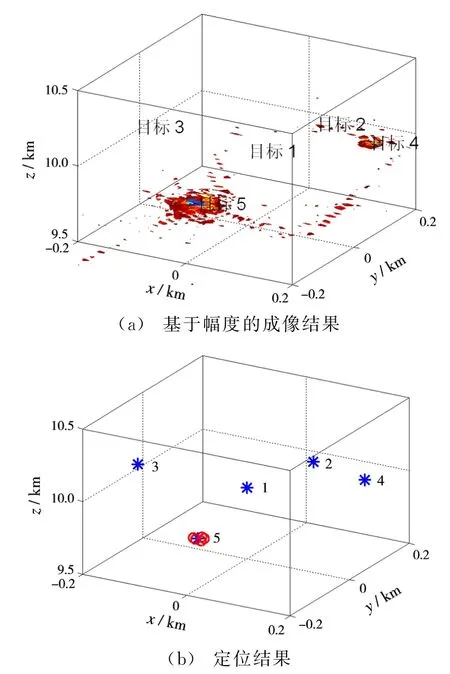
图5 幅度积累法的定位结果
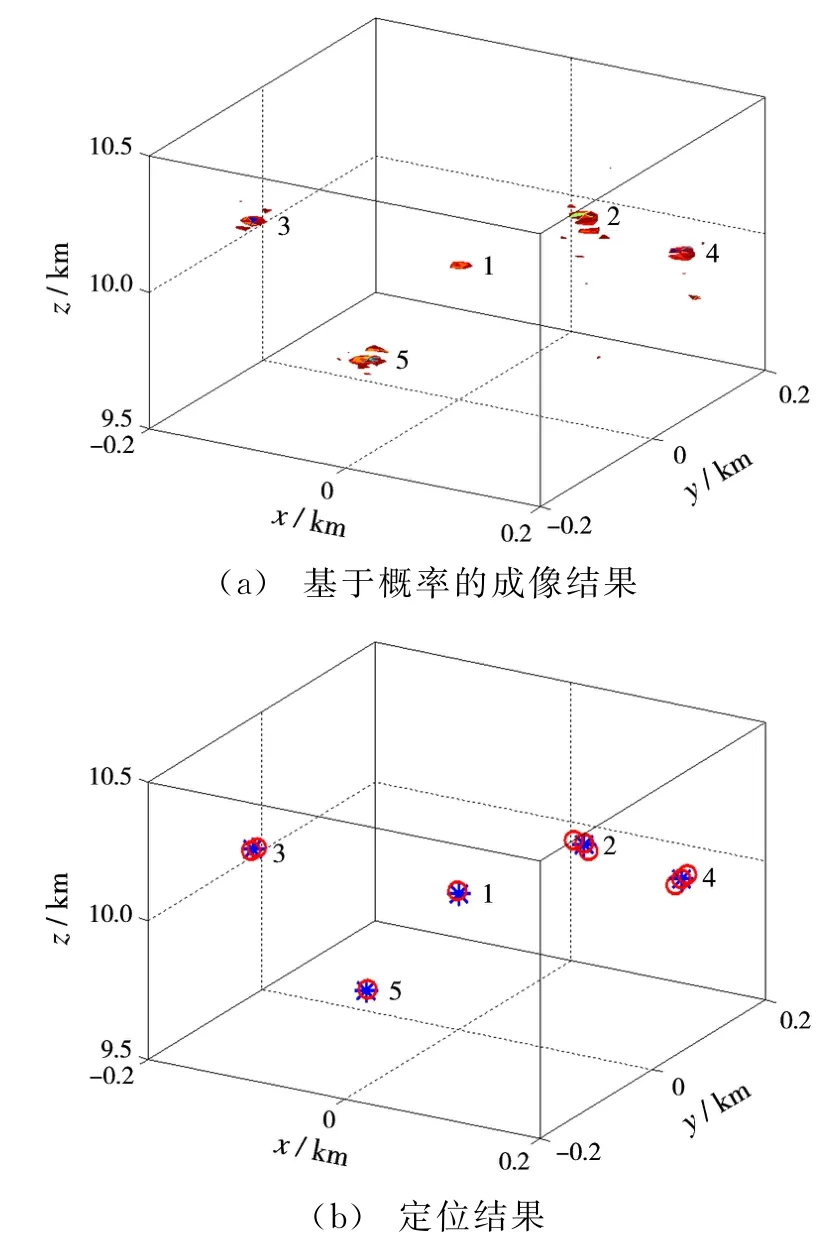
图6 统计概率法的定位结果
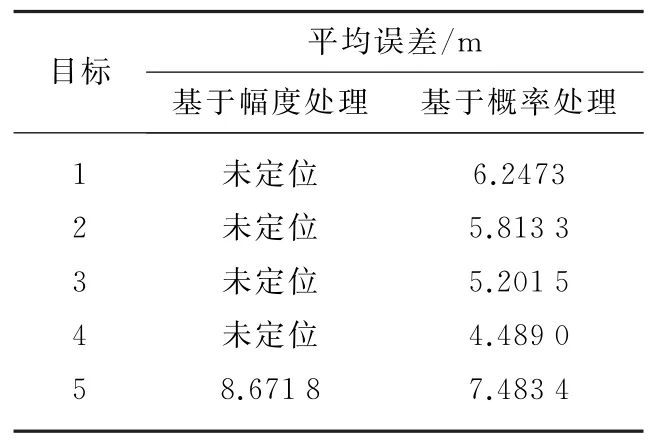
表2 两种多目标定位方法误差对比
从表2可知,基于幅度积累的多目标定位受强目标的影响较为严重,只能定位出目标5,而基于统计概率的多目标定位,定位精度较高,即使是弱目标也能够较为准确地定位。
综上,基于统计概率的多目标定位方法可显著提高对弱目标的检测能力与定位精度,其效果优于基于幅度积累的定位方法。
4 结束语
本文提出了一种基于统计概率的多目标定位方法,首先计算目标在三维空间中的存在概率,然后筛选出目标存在概率大于门限值的概率信息,结合BP算法,利用概率信息对目标进行成像,进而提取出目标的三维位置。这种方法不仅减小了数据处理量,而且在一定程度上抑制了噪声对多目标定位的影响,图像聚焦效果以及目标分辨率得以改善,在多目标的情况下,减小了强目标对弱目标的影响,使弱目标不易被强目标所淹没,增强了对弱目标的检测定位能力。
[1]沈阳,陈永光,李昌锦,等.组网雷达反隐身能力的评估指标体系[J].雷达科学与技术,2004,2(2):73-76.SHEN Yang,CHEN Yongguang,LI Changjin,et al.Evaluation Index of Counter-Stealth Ability of Netted Radar[J].Radar Science and Technology,2004,2(2):73-76.(in Chinese)
[2]黄琦,黄海,谢冬青.高精度AOA分簇定位算法[J].信息网络安全,2014(12):51-55.
[3]唐小明,王贞杰,张涛.五站数据加权融合无源时差定位[J].电讯技术,2011,51(11):47-52.
[4]SHI Tongyan,ZHANG Xiaoling,SHI Jun.Multi-Target Positioning for Sensor Network Based on Imaging Strategy[C]∥2013 International Conference on Computational Problem-Solving,Jiuzhai:IEEE,2013:171-174.
[5]RUBAEK T,ZHURBENKO V.Microwave Imaging Using Amplitude-Only Data[C]∥2010 Proceedings of the Fourth European Conference on Antennas and Propagation,Barcelona:IEEE,2010:1-4.
[6]李猛,王智,李元实,等.角度传感器网络多目标定位的数据关联算法[J].电子学报,2014,10(42):1887-1893.
[7]郑宏博.多基地雷达时差定位技术研究[D].成都:电子科技大学,2012.
[8]刘洋,杨乐,郭福成,等.基于定位误差修正的运动目标TDOA/FDOA无源定位方法[J].航空学报,2015,36(5):1617-1626.
[9]HONG I K,CHUNG S T,KIM H K,et al.Fast Forward Projection and Backward Projection Algorithm Using SIMD[C]∥IEEE Nuclear Science Symposium Conference Record,San Diego,CA:IEEE,2006:3361-3368.
[10]江川,王炳和,陈玙.基于概率的定位方法分析及其仿真[J].声学技术,2009,28(6):78-81.