基于雷达实装数据的点迹模拟器设计∗
2016-01-10钮俊清任清安朱明清
钮俊清,任清安,朱明清
(1.中国电子科技集团公司第三十八研究所,安徽合肥230088;2.孔径阵列与空间探测安徽省重点实验室,安徽合肥230088;3.智能情报处理重点实验室,安徽合肥230088)
0 引言
近年来,随着雷达技术不断发展,雷达模拟器在雷达应用中得到广泛的应用[1-5],大部分雷达模拟器采用硬件和软件相结合的半实物仿真方式,但这类设计费用较高,对雷达数据处理(航迹处理、显控、波束调度)等软件的调试不够灵活。
点迹模拟器采用纯软件的方式模拟实装雷达DSP处理后的凝聚点迹,包括目标点迹、杂波点迹(海杂波、地杂波、云雨杂波)、干扰点迹、目标点迹、杂波区域、干扰区域等信息,且设置灵活,可以充分验证雷达软件的以下性能:
1)航迹处理性能:点迹处理能力、航迹处理能力、机动目标跟踪能力、杂波起始能力和抗干扰能力等;
2)显控性能:点迹显示能力、航迹显示能力和战术操作能力等;
3)波束调度性能:事件调度成功率、时间利用率等。
但现有的点迹模拟器有很大的缺陷:①杂波/干扰的仿真和真实情况的差距较大;②雷达扫描波束的仿真与雷达实际工作方式差距较大,特别是相控阵雷达;③运动平台的姿态信息的仿真和真实雷达的平台差距较大。同时真实的雷达点迹数据也有缺陷:①目标类型比较单一,大多数为民航飞机;②目标运动模型比较简单,很少出现编队,交叉等飞行的目标;③大多数目标很难获得GPS数据;④杂波区域比较固定,缺少不同类型的干扰数据。
为了解决以上问题,本文以雷达的真实数据(包括时统、平台、波束)代替雷达点迹模拟器的平台、波束信息,并通过场景编辑软件中设置目标、杂波、干扰、随机目标等参数实现真实的雷达点迹上的杂波、干扰、目标/随机目标的任意叠加,对雷达数据处理软件的功能和性能进行充分的测试。
1 雷达点迹模拟器设计
1.1 软件组成及功能
雷达点迹模拟器软件系统组成如图1所示。
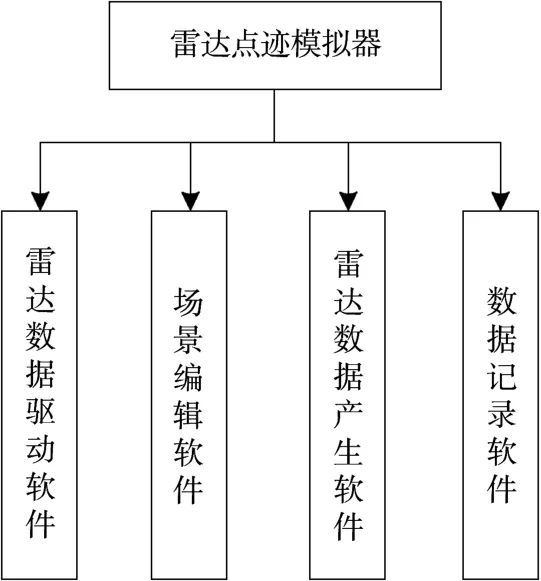
图1 雷达点迹模拟器软件组成
雷达模拟器的软件功能如下:
1)雷达数据驱动软件
雷达数据驱动软件主要完成以下功能:
(a)仿真控制:对整个模拟器进行仿真开始、结束等控制;
(b)时统:对整个系统进行时统;
(c)波束统一:整个系统扫描波束保持一致;
(d)平台统一:对整个系统的平台位置等信息与实际雷达采集的平台信息一致;
(e)点迹信息:将点迹信息发送到航迹处理。
2)场景编辑软件
场景编辑软件主要完成以下功能:
(a)目标设置:根据需求设置不同目标及运动轨迹;
(b)杂波/干扰设置:根据要求设置杂波的等级以及干扰个数和区域,以及区域的形状;
(c)设置随机目标数。
3)雷达数据产生软件
(a)杂波/干扰:根据接收到的波束位置及杂波/干扰信息,产生杂波和干扰点,发送到航迹处理软件,并在显示界面显示;
(b)目标点迹解算:根据接收到的波束位置和目标的位置信息,以及雷达的参数(比如波束宽度、检测概率、由GIS信息计算的地形遮挡等),解算目标的点迹信息,并发送到航迹处理软件,并在显示界面显示;
(c)产生随机目标:根据接收到的随机目标的个数,初始化目标的参数,包括位置、速度、航向、运动模型等。
4)数据记录软件
将波束调度的信息、目标的真值、目标的航迹保存到数据库里,作为航迹处理评估、波束调度评估的基础数据,同时可以将记录的数据进行重演。
1.2 软件的处理流程
雷达点迹模拟器软件处理流程如图2所示。其中左侧为实装雷达软件,右侧为模拟器。
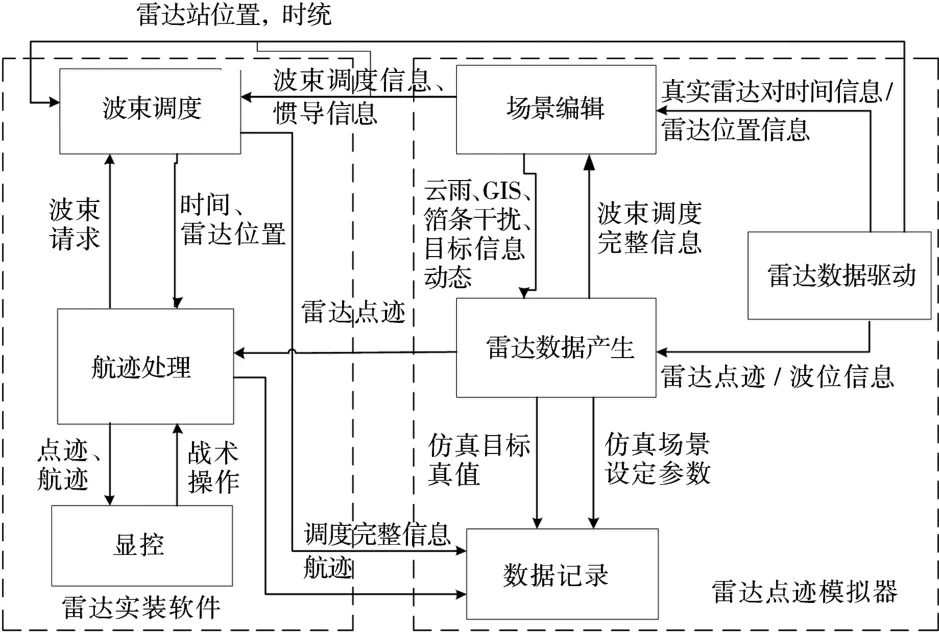
图2 雷达点迹模拟器软件处理流程
首先场景编辑软件,根据雷达站的位置进行如下信息的设置:①设置目标的类型、参数和运行轨迹;②设置杂波、干扰的范围、形状、强度和速度等参数;③设置随机目标数。然后雷达数据驱动进行仿真开始控制,并将雷达站的平台信息、时统信息、雷达波束信息实时地发送到波束调度和场景编辑软件。最后雷达数据产生软件根据接收到的实时目标的位置、平台、杂波干扰、地形遮挡、发现概率等信息,解算雷达点迹发送到航迹处理、并把真值发送到数据记录软件。同时数据记录软件将目标的真值、目标的航迹信息及波束的调度信息保存在数据库中,用于波束调度和航迹处理软件性能评估。
2 雷达点迹模拟器关键算法
2.1 坐标转换
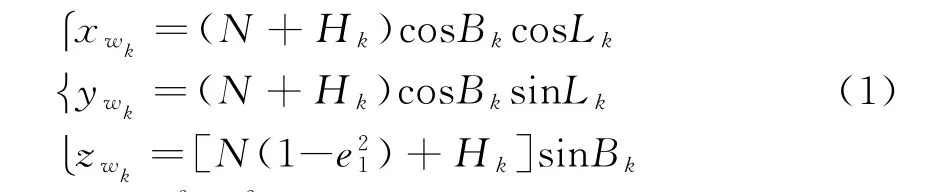
1)大地坐标系转WGS-84直角坐标系
假设目标的大地坐标为(L k,B k,H k),转换后的地心直角坐标系坐标为(x wk,y wk,z wk),转化公式如下:
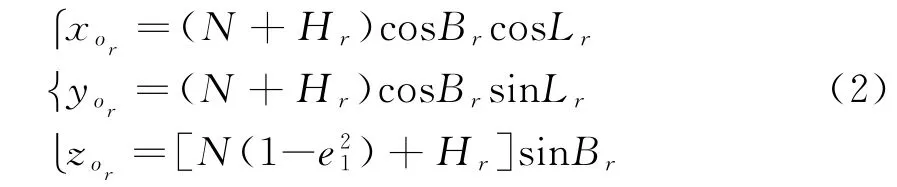
2)WGS-84直角坐标系到地心直角坐标系转换
假设地面站的坐标为(L r,B r,H r),地心直角坐标为(x or,y or,z or),转化公式如下:
故地心直角坐标系转换到站心坐标系坐标(x rk,y rk,z rk),转化公式如下:
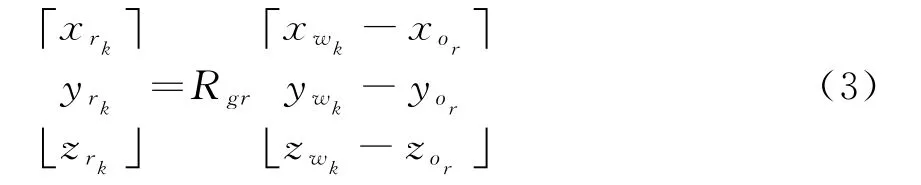
式中,

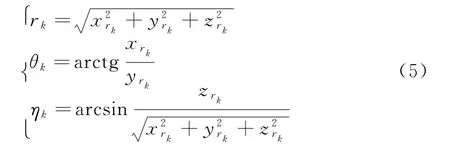
3)地面直角坐标系转换到地面球面坐标系转换
假设站心球面坐标为(r k,θk,ηk),故由目标的地面直角坐标(x rk,y rk,z rk)转化为地面极坐标的(r k,θk,ηk)的坐标变换为
2.2 关键参数计算
1)目标点迹发现概率
对Swerling I类目标,计算雷达作用距离的方程如下式[6]所示:

根据雷达的参数表及目标的RCS、求出目标在发现概率为0.5时的最大距离Rmax,此时的信噪比SNR0,利用当前目标的位置R,求出当前的信噪比如下式所示:

对Swerling I类目标,目标点迹的发现概率与信杂噪比之间的关系如式(8)所示。

式中,P f0=10-6。
2)地形遮挡计算
首先根据雷达在距离R、方位θ和俯仰η上的威力,建立三维数据表(R i,θj,ηk),其中,
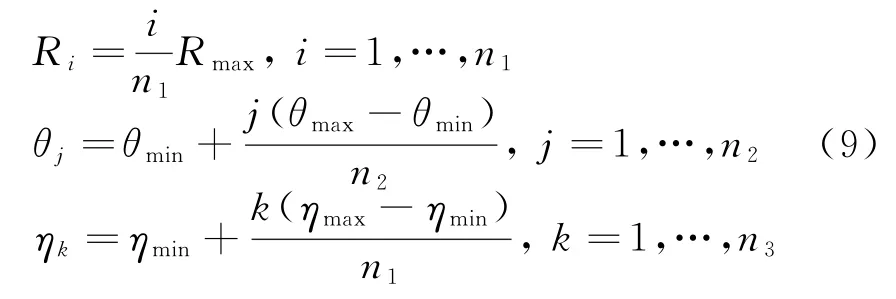
在场景编辑软件接收到雷达站的位置,然后根据GIS数据,计算建立的三维数据表(R i,θj,ηk)所对应的遮蔽信息D i,j,k。
3)场景编辑技术
编辑复杂的战场态势,就要将数据和图形结合起来进行目标轨迹的设计。在设计目标运动轨迹上,我们采用了“所画即所得”方法,通过按住鼠标,在显示器屏幕上绘制你所需要的轨迹图,将轨迹像素点的屏幕坐标转化为经纬度坐标,形成目标的真值轨迹数据,并通过运动模型对轨迹进行修正。目标在模拟仿真的时候是按照真值航线运动的,运动的速度和高度可以人工设置。这样做的好处就是目标的运动都是按照指定的轨迹,每次模拟的过程都是一致的。
3 应用效果
3.1 仿真目标叠加
考虑在雷达实际探测过程中可能遇到的情况,比如目标编队、高速高机动、杂波起始、穿杂波稳定跟踪、交叉飞行跟踪等情况,在雷达真实数据上叠加这些目标信息,其中编队和穿杂波稳定跟踪性能测试的场景编辑如图3所示,目标叠加后航迹处理的显示效果如图4所示。

图3 编队目标场景编辑
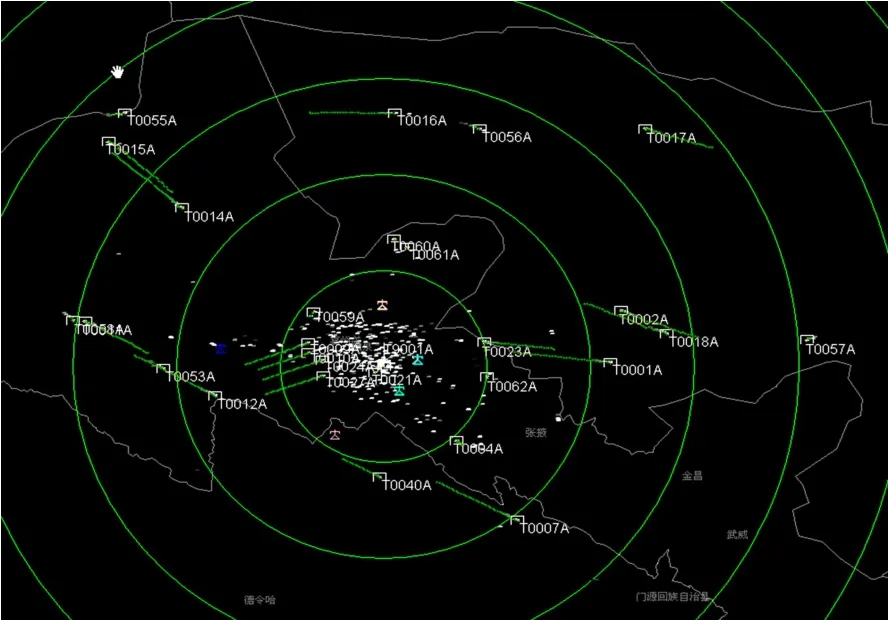
图4 编队穿杂波场景中的航迹处理效果
3.2 杂波干扰叠加
可以根据实际情况,在雷达的干净区域的真实目标附近叠加雨云等杂波和干扰,可以检验航迹处理软件真实目标的杂波、干扰起始能力、穿杂波和干扰的能力、杂波干扰的抑制能力。加杂波区域的航迹处理效果如图5所示。

图5 叠加杂波场景中的航迹处理效果
3.3 随机杂波和随机目标叠加
通过在真实雷达数据上叠加随机目标可以验证航迹处理软件的航迹处理性能(比如600批/帧),叠加随机杂波可以验证航迹稳定跟踪的性能。随机杂波叠加和随机目标叠加如图6和图7所示。
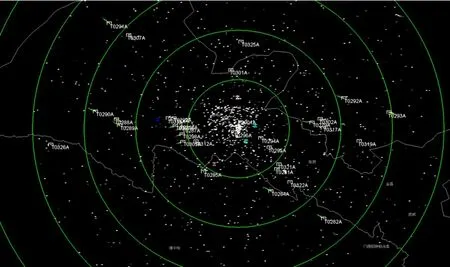
图6 叠加随机杂波场景中的航迹处理效果
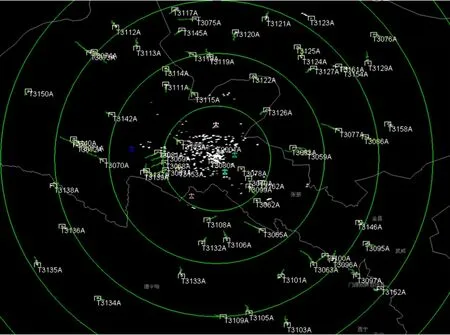
图7 叠加随机目标场景中的航迹处理效果
4 结束语
本文针对当前雷达点迹模拟器的缺陷和雷达数据处理软件接口、性能和功能的测试要求,采用雷达真实数据和雷达点迹模拟器相结合的技术,即以真实雷达的时统、平台、波束取代雷达点迹模拟器的相应信息,以真实雷达的点迹作为雷达点迹模拟器的背景信息,在场景编辑中灵活地设置目标、干扰、杂波、随机目标,得到近似实装的灵活多变的场景,实现对雷达数据处理软件的接口、功能、性能进行详尽而彻底的测试。
[1]KANG E W.Radar System Analysis,Design and Simulation[M].Boston:Artech House,2008:112-133.
[2]李承志,李炜.雷达仿真系统场景生成模块设计[J].火控雷达技术,2012,41(3):18-21.
[3]郭佳意,马敏,任清安.岸基雷达模拟器的设计与实现[J].现代电子技术,2012,35(14):90-96.
[4]郭佳意,任清安,马敏.雷达模拟器中判定目标点迹发现的解耦算法[J].空军预警学院学报,2013,27(2):102-104,107.
[5]江建民,贺瑞龙.通用搜索雷达模拟器的设计[J].雷达科学与技术,2006,4(1):7-11.JIANG Jianmin,HE Ruilong.Design of General-Purpose Surveillance Radar Simulator[J].Radar Science and Technology,2006,4(1):7-11.(in Chinese)
[6]SKOLNIK M I.Radar Handbook[M].3rd ed.New York:Mc Graw-Hill,2008.