基于MUSIC算法的测向系统的System Vue仿真设计
2016-01-10
(军械工程学院电子与光学工程系,河北石家庄050003)
0 引言
System Vue软件是由美国安捷伦(Agilent)公司推出一款基于Windows系统平台的电子通信系统级仿真工具软件。该软件从基本的滤波器、变频器、数模信号处理,到雷达系统、导航控制、电子战等系统级的仿真都能完成;同时,还能够进行动态系统的仿真以及通过相应匹配的接口连接硬件设备实现半实物的仿真。System Vue拥有非常完备的元器件库,其中包括雷达库、多输入多输出信道工具库、算法设计库、硬件设计库和射频设计库等。同时,也可以根据需要自己编写元器件,利用这些完备的元器件库可以方便快速地建立系统的仿真程序,也可以先通过建立多层子系统,然后将多层子系统构建成大规模的分层系统。在System Vue进行编译运行的时候可以先运行部分子系统,然后运行整个系统。如果编译出现错误,界面会自动弹出报错窗口,并显示哪个模块出现错误。错误分为信息提示、警告、错误和严重错误四个等级,通过对出错模块的精确定位,可以有效减少整个系统的调试时间。
System Vue具有很强大的电子系统级的建模仿真能力,目前主要应用于通信等领域。例如文献[1]中利用System Vue软件分析了无线通信原理的仿真实验教学,文献[2]在System Vue环境下建立了单载波超宽带的系统仿真;在雷达系统设计仿真中的应用还比较少,在文献[3]中完成了对美国某型雷达的发射和回波信号的生成,在安捷伦科技申请报告[4-5]中利用System Vue软件完成了雷达系统的简单设计以及在环境杂波和干扰情况下的性能分析。
目前,尚未看到System Vue软件在波达方向角(DOA)估计方面的仿真研究与设计。DOA估计的研究需要同时在电路设计和软件算法两个方面开展仿真设计,可以充分发挥System Vue软件的性能,特别是在DOA估计的阵列信号处理仿真方面。本文以System Vue软件为平台,结合经典空间谱估计算法—MUSIC算法,设计实现了对多信源的DOA估计。
1 经典MUSIC算法
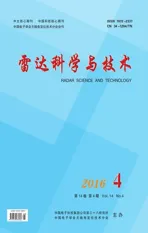
经典MUSIC算法[6-9]是由Schmidt在1979年提出的,该算法开创了超分辨测向技术的历史先河。该算法是对天线接收信号的阵列协方差矩阵进行特征分解的算法。如图1所示,接收天线为一个M阵元的均匀线阵,阵元间距为d,总长度为L=(M-1)×d,辐射源以波达方向角θ入射到天线阵,波长为λ,信号的载频为ejwt,频带宽度为B,在基准阵元1处接收的信号为s(t)ejwt,s(t)为幅度调制函数,所以在P(1≤P≤M)阵元处接收到的信号为s(t-tr)ej[wt-θ(t)],tr为延迟时间,θ(t)为延迟相位。信号的频宽B远小于信号的载频w,所以s(t-tr)ej[wt-θ(t)]相对于基准点的变化也相对较慢;tr远小于1/B,所以s(t-tr)ej[wt-θ(t)]与s(t)ejwt近似相等,基于以上两点可以理解为接收信号的包络在各个阵元上的误差可以忽略。
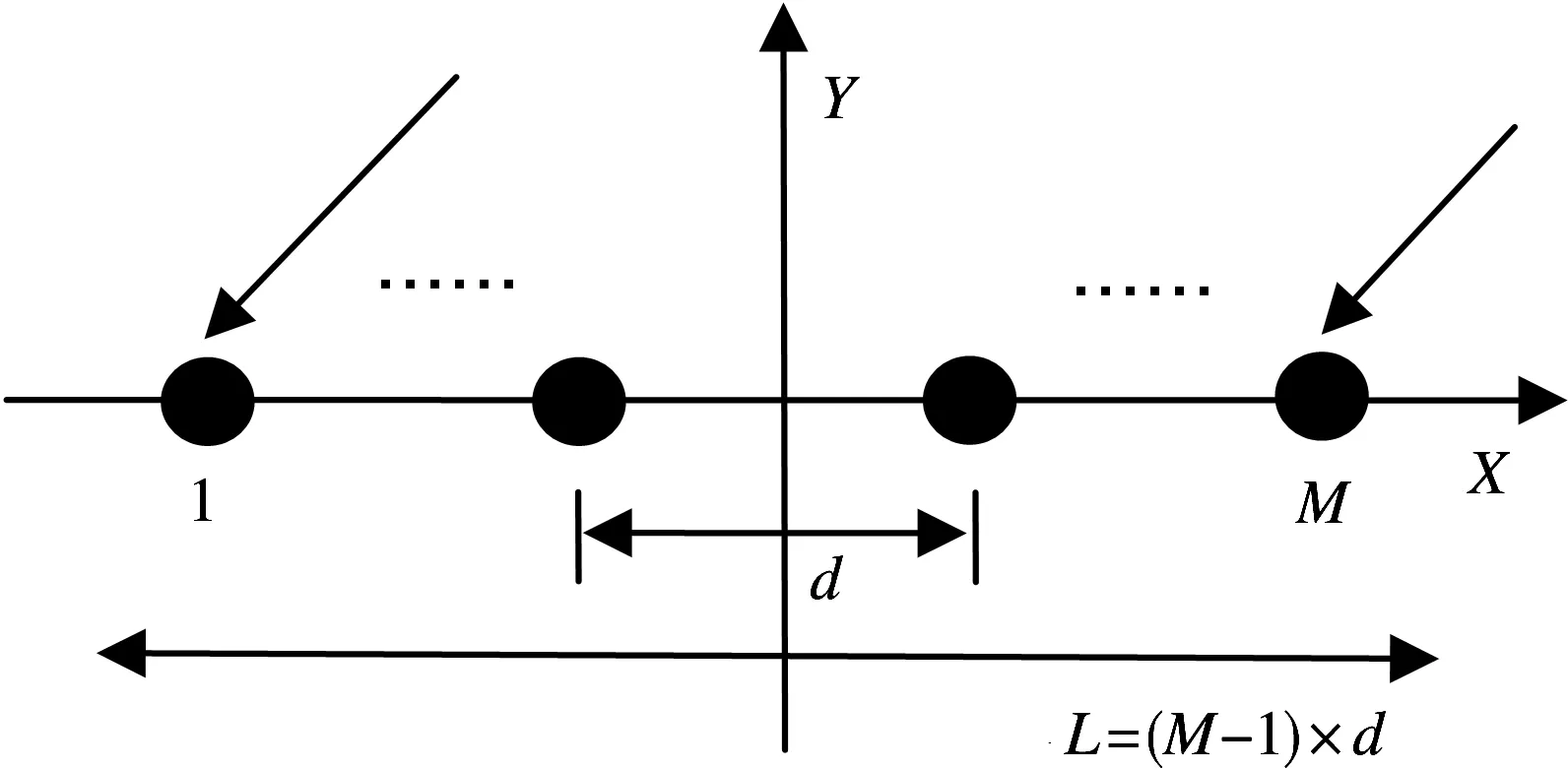
图1 阵列天线模型
1.1 阵列信号模型
来自远场空间的信源1的入射角为θ1,相对于基准阵元的方向向量[10]为
a(θ1)=[1,e-j(2π/λ)dsinθ1,…,e-j(2π/λ)(M-1)dsinθ1]TT表示转置。则信源N(N<M)的入射角为θN,相对于基准阵元的方向向量为

设S(t)=[s1(t),s2(t),…,s N(t)]T为N个入射信源的幅度调制函数,A=[a(θ1),a(θ2),…,a(θN)]T为N个入射信源的导向矢量,设N(t)为加性噪声矢量,N(t)=[n1(t),n2(t),…,n N(t)]T,其中n i(t)(1≤i≤N)是与各个信源不相关的高斯白噪声,均值为零,方差为σ2。所以,对于来自远场的N个信源,阵列天线接收到的信号为X(t)=A S(t)+N(t)。
1.2 算法原理
在N个信源互不相关且和噪声独立的情况下,对阵列天线接收到的信号X(t)进行协方差处理,得到协方差矩阵R XX=E[X XH]=A E[SSH]AH+E[N NH],所以可以得到R XX=A R SS AH+σ2I,R XX为接收信号的相关矩阵,σ2I为加性噪声的相关矩阵。将接收信号的相关矩阵R XX进行特征分解,得到的特征值从大到小排列为λ1,λ2,…,λN,同时,R XX形成两个相互正交的子空间U S和U N,其中U S为大的特征值λ1,λ2,…,λC,(1≤C<N)的特征向量张成的为信号子空间,U N为所对应的小的特征值λC+1,λC+2,…,λN的特征向量张成的噪声子空间,所以等式两边分别乘以U N得到σ2U N,由于U S和U N相互正交,AR SS AHU N=0,其中信号子空间的协方差矩阵R SS为满秩矩阵,非奇异,因此存在逆矩阵,所以可以得到AHU N=0,由该式可以说明矩阵A中的每个列向量都与噪声子空间正交。因此,信号子空间的特征向量与噪声子空间的特征向量的正交关系,构建MUSIC空间谱函数[11]为

设置θ从小到大不断变化,通过谱峰搜索得到DOA。
2 测向系统设计
随着电子信息技术的高速发展,对DOA估计测向系统的研究越来越深入,其应用领域也越来越广。如在战地雷达测向系统、空中机载预警系统以及民用海航测向定位等领域,DOA估计测向系统已经得到广泛应用,并在简洁性、快速性和精确性等方面得到了进一步的发展与提高。我们自主研制了基于MUSIC算法的多信源波达方向角测向系统,其功能框图如图2所示。主要包括信源的产生、构建远场窄带阵列信号、信号的接收和处理以及数据处理等部分。

图2 测向系统功能框图
3 基于System Vue的测向系统的仿真设计
为了缩短测向系统的研发周期和降低研发成本,采用System Vue软件对基于MUSIC算法的测向系统进行了仿真设计。对于测向技术,既可以进行单目标和多目标信源进行建模,也可以设置环境杂波的干扰,以达到更真实的仿真环境。其中,Math Lang模块[12]可以完成多种算法的编译,以满足测向对算法的依赖。所以进行测向系统仿真设计时,只需根据设计的程序,选择相应的模块,设置合适的参数以及编写算法则可以完成系统搭建。
针对图2所示的多信源测向系统,将图中每一个方框用System Vue中单个模块或者多个相互独立的功能模块来完成。在System Vue软件平台上构建的总体设计程序,这里以图2中一路信号为例,其示意图如图3所示。

图3 测向系统仿真程序
3.1 信源的产生
为了能够清晰地了解整个仿真程序流程,将其划分为几个部分进行详细分析。信源的产生部分如图4所示,该程序设计中信源产生的方式是一样的且信号形式都是线性调频信号(LFM),只是在信号的参数设置上有所区别,以避免同频干扰,因为经典的MUSIC算法无法对相干信号进行分辨。4个信源的脉宽PW分别设为20,30,40和50 μs;脉冲重复间隔PRI设置为100,200,300和400μs;带宽BW设置为1,2,3和4MHz,由RADAR_LFM为线性调频产生器模块产生这4个信号,之后信号通过采样模块Set_Sample_Rate变为离散化的信号,采样频率设置为50MHz,然后将采样之后的信号送入Cx_To_Env模块进行载波调制,载波频率为10 GHz。
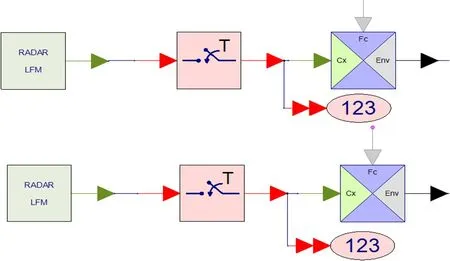
图4 信号的产生
3.2 远场窄带阵列信号
将进行载波调制之后的信号通过移相器模块,如图5所示。该模块将增加从远场信源观测点到数字阵列天线的相移。设置该模块的天线形式为均匀线阵,X轴上为8个阵元,Y轴上1个阵元(其中一个阵元X轴和Y轴共用),阵元之间间距为载波波长的一半,4个信源的相移也就是入射角设置为-5.5°,15°,16°,25°。

图5 窄带远场阵列信号生成
3.3 信号接收和处理
将四路远场窄带阵列信号通过RADAR_Multich_Rx完成信号的多信道接收,如图6所示。该模块的内部参考频率设置和载波频率一样,其为10 GHz,每一路接收模块RADAR_Multich_Rx设置为8个接收信道,将多信道接收后的信号通过同步数据整流器模块,将每个信源经过8个阵元接收后的数据进行数据的同步整流,使8个信道的数据流整合为一个同步输出。
图6 信道接收和处理
3.4 数据处理
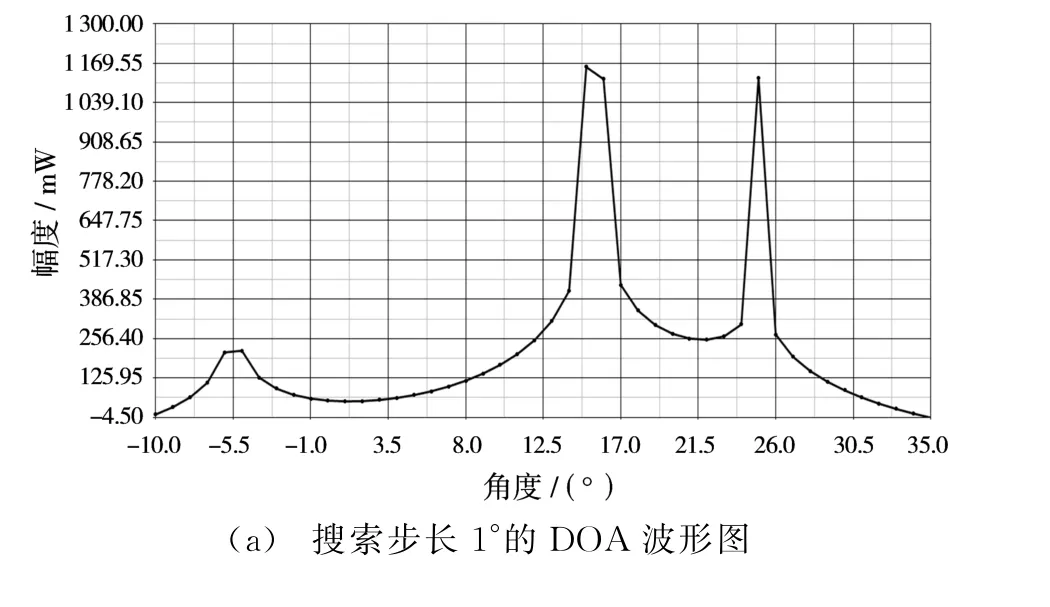
将四路经过同步整流的信号通过Add模块,得到一路信号,之后将信号通过Pack_M模块,将标量的数据进行阵列打包,形成8行1 024列的阵列;之后将其送入Math Lang模块中进行处理,在Math Lang模块中进行MUSIC算法的程序运算,该模块可以编译多种的语言,如 Matlab、C++等;同时,在公式区域中进行自定义参数变量的设置,例如阵元数量、波长、阵元间距等。MUSIC算法程序中完成对4个信源的空间谱搜索,需要利用Sweep来完成,搜索角度从-10°到35°,步长设置为1°,0.5°和0.1°这3种情况,不同的搜索步长能够得到不同的测向精度及分辨率,如图7所示。

图7 数据处理
4 仿真结果
根据以上的程序设计,在System Vue仿真平台上运行,得到仿真结果如图8和图9所示,据此可以来验证测向系统的可靠性和准确性。图8为4个信源的发射波形图。其中,实线为信源1,长虚线为信源2,短虚线为信源3,长短交替虚线为信源4,从图8可以看出,设置的4个信源的频率是不一样的,因此不会出现同频干扰。从图9可以看出,在平滑的波形图曲线上出现了很多圆点,这是由于采用了Toggle Vertex Symbol功能,这有利于寻找拐点和谱峰。图9(a)为搜索步长1°的波形图,可以明显地看出不能测出信源1的角度,同时信源2和信源3也不能够明显地分辨开,只有信源4的角度能够较准确地测出;图9(b)为搜索步长0.5°的波形图,可以明显地看出能够测出信源1的角度,同时,也能够将信源2和信源3明显地分辨开;图9(c)为搜索步长0.1°的波形图,可以明显地看出谱峰更加尖锐,更有利于角度的分辨。从以上的仿真结果看出,利用System Vue仿真平台,以MUSIC算法为基础构建的测向系统,依靠不同的搜索步长,在无同频干扰和背景物体反射的多径信号情况下,具有很好的测向精度和分辨率。
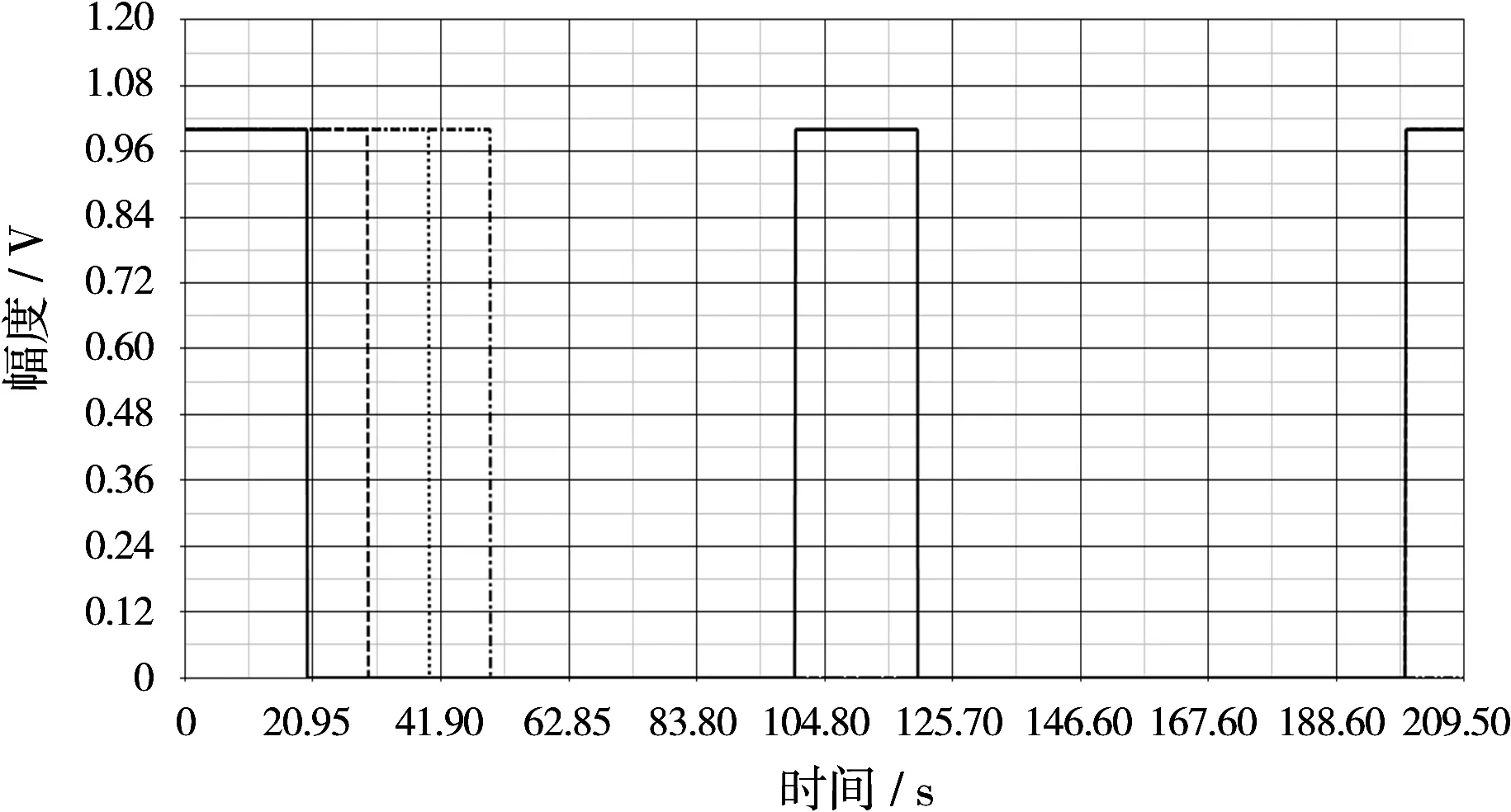
图8 4个信源的波形图
5 结束语
在波达方向角估计的仿真设计中,不少的仿真软件都可以实现一定的仿真效果,但是只能实现功能级的仿真,不能将信号在电路中的特性体现出来。本文在System Vue软件的仿真环境下建立了基于MUSIC算法的测向系统的仿真平台,完成了多信源测向,并验证了结果的正确性。仿真过程与结果表明,System Vue软件在其友好的界面上依靠图符模块方便快捷地构建电子系统级的仿真,能够直观地显示出信号在系统中的运行情况以及电路的特性;在其分析窗口中能够动态实时地呈现出信号的运行情况。因此,System Vue软件在电子系统仿真方面具有更强的针对性和专业性,表现出了其新颖性和优越性,将具有广阔的应用前景。
[1]程文清.基于System Vue的无线通信原理仿真实验教学研究[J].中国现代教育装备,2012(13):50-51,54.
[2]吴昊,肖振宇,孔红伟,等.基于System Vue的单载波超宽带系统仿真[J].传感器与微系统,2012,31(4):7-9,13.
[3]张杰,何强,韩壮志.基于System Vue的某型雷达发射信号生成[J].现代电子技术,2014,37(21):45-48,52.
[4]LEISS D,BHARGAVA A.Radar System Design and Interference Analysis Using Agilent System Vue[Z].Agilent Technologies Application Note,2010.
[5]Agilent Technologies.Using System Vue’s Radar Library to Generate Signals for Radar Design and Verification[Z].Agilent Technologies Application Note,2011.
[6]黄丽薇,陈慧琴,陈玉林.MUSIC及其改进算法的研究与实现[J].电子科技,2015,28(3):55-57,75.
[7]李杰然,许稼.共形阵列信号DOA和极化状态联合估计研究[J].雷达科学与技术,2015,13(2):159-163.LI Jieran,XU Jia.Joint Estimation of 2D-DOA and Polarization Based on Conformal Array[J].Radar Science and Technology,2015,13(2):159-163.(in Chinese)
[8]刘剑,宋爱民,郭兴阳,等.MUSIC测向算法的入射方向确定方法[J].信号处理,2015,31(8):896-900.
[9]刘小忠,闵威,张孟达,等.宽带独立信号和相干信号的DOA估计[J].雷达科学与技术,2014,12(6):619-622,628.LIU Xiaozhong,MIN Wei,ZHANG Mengda,et al.DOA Estimation for Wideband Independent and Coherent Signals[J].Radar Science and Technology,2014,12(6):619-622,628.(in Chinese)
[10]丁鹭飞,耿富录.雷达原理[M].3版.西安:西安电子科技大学出版社,2002:202-212.
[11]张小飞,陈华伟,仇小峰,等.阵列信号处理及MATLAB实现[M].北京:电子工业出版社,2015:92-97.
[12]陈永红,郭莉莉,张士兵.System Vue在电子信息类课程中的应用[J].现代电子技术,2015,38(3):152-154,157.