一种空-地双基地雷达时间同步方法
2016-01-10
(军械工程学院,河北石家庄050003)
0 引言
双基地体制雷达由于接收机静默工作、收发分置而具有良好的反侦察、抗反辐射导弹、抗干扰、反隐身隐蔽的“四抗”能力。常规的地-地双基地雷达接收机和发射机易于精确定位且位置固定,可以采用一定的通信链路进行时间同步与频率同步处理[1]。但空-地双基地雷达发射机安装在运动的空中平台上,位置不断变化,不利于高精度同步的实现[2]。因此,同步问题是需要解决的重点问题。同步问题包括3个方面,即频率同步、空间同步和时间同步。针对发射机置于小型无人机上的战场侦察空-地双基地雷达空间同步问题,文献[3]已经进行了研究和分析。本文主要讨论该空-地双基地雷达的时间同步问题。研究双基地雷达利用GPS时间信号,对高稳恒温晶振进行校频,实现收发站的时间同步。最后给出实验结果,验证此方法的可行性。
1 空-地双基地雷达时间同步
合作式双基地雷达是依据接收的回波相对发射信号的时延来测量目标距离的,所以发射机和接收机之间严格的时间同步是准确定位目标的前提。此外,时间同步还是收、发之间频率同步的基准。不仅如此,对采用脉冲追赶技术来实现空间同步的空-地双基地雷达[3],计算脉冲追赶时间表需要高精度的同步时间。实现时间同步的方案主要有直达波同步法、直接同步法和间接同步法[4]。其基本原理及特点如表1所示。

表1 时间同步方案比较
直达波同步法需要设置专门的信道来提取同步信号,存在多径效应和信杂噪比等问题[5],适用于发射功率较大且收发站距离不远的情况。一般应用于非合作双基地雷达。
直接同步法是将发射机的触发脉冲经数据链直接送至接收机,目前常采用的是微波或光纤直接同步法,但同步精度较低[6]。
间接同步法是将独立的时钟作为时间基准,实现双/多基地的时间同步,同步精度取决于时钟的稳定度和准确度。常用的时钟授时方案有卫星授时、短波授时、长波授时、内部时钟授时[4]。其中,短波授时与长波授时受地理环境影响较大[7];卫星授时精度较高,可以达到纳秒级的量级,但存在一定抖动和卫星失锁的情况,导致较大的误差[8];内部时钟如原子钟和高稳定度晶振稳定性较好,但长时间运行累积误差较大[9]。
在对空-地双基地雷达进行时间同步研究时,需要作以下考虑:
1)通常要求的时间同步精度为发射脉冲宽度的几分之一量级,根据文献[2]对发射机置于小型无人机上的空-地双基地雷达的研究,该系统时间同步精度应达到数十纳秒的量级,采用微波或光纤直接同步法无法达到该要求。
2)受空中平台载重限制和尺寸限制,应尽量减少附加设备数量[10]。短波授时和长波授时需要专门的接收设备,而卫星授时与卫星定位用一个卫星信号接收设备,同时为时间同步和空间同步提供基准。
综合以上各个方法的原理和特点,可采用卫星授时作为雷达系统的标准时间。目前卫星授时主要有GPS授时和北斗授时,GPS授时有单站法和共视法两种,其精度可达5~20 ns[11];北斗授时有单向和双向两种,时间同步精度可达到数十纳秒的量级[12]。由此可见,卫星授时精度已达到空地双基地雷达系统要求,但卫星接收机输出的时间信号存在较大的随机误差,稳定性差。相比之下,晶振和原子钟随机误差小。现拟采用晶振与卫星授时结合的同步方案为空-地双基地雷达进行时间同步。接收机和发射机上各置同样标准的高稳可调晶振与卫星信号接收机,将晶振分频所得的秒信号与GPS或北斗的秒脉冲信号(1 pps)进行数字鉴相,结合晶振的压控特性[13],得到对晶振的控制修正电压,最终使晶振锁定在卫星标准秒信号上,得到准确度和稳定度都较高的时间信号,其结构框图如图1所示。
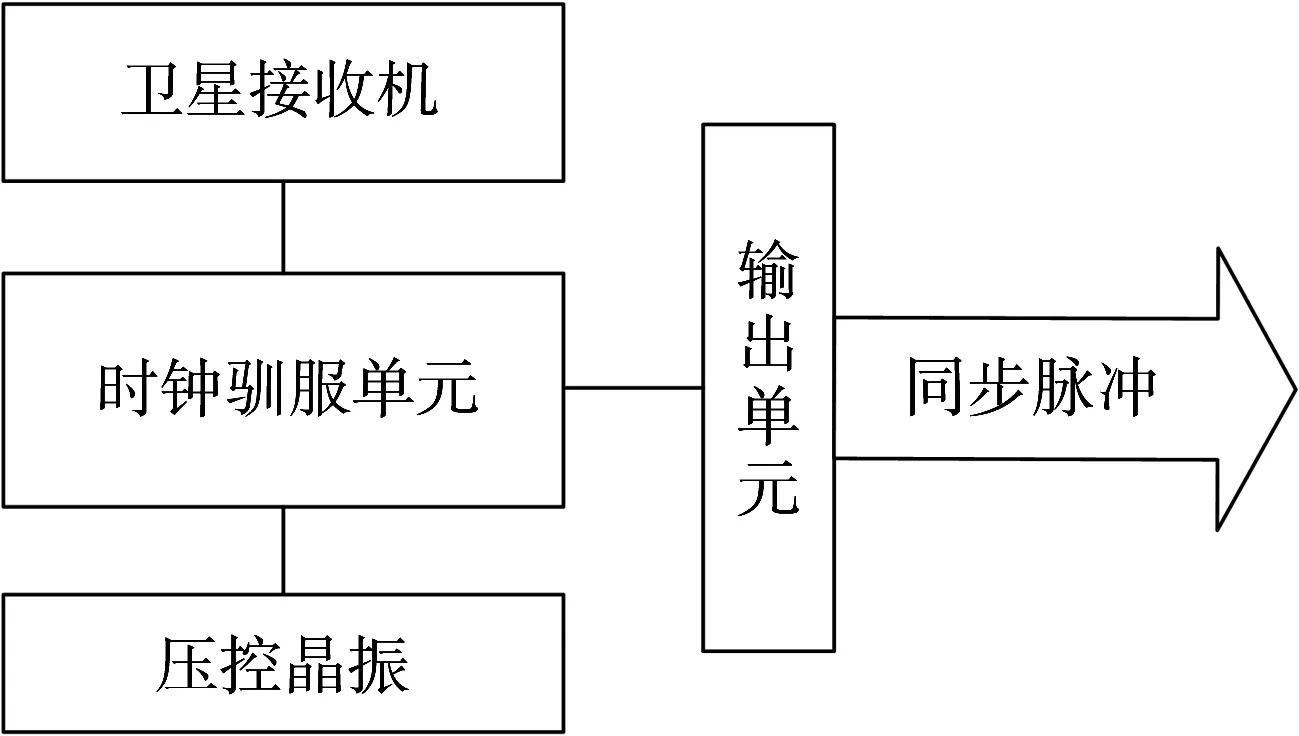
图1 同步系统结构框图
其中,时钟驯服单元选用FPGA作为主控器,对秒信号进行鉴相,将鉴相值进行滤波处理并转化为控制电压,最后将电压值送入数模转换器得出控制修正电压,经可控晶振振荡器的EFC(Electronic Frequency Control)端达实现对晶振频率和相位的控制,得到同步脉冲信号。同步系统硬件电路框图如图2所示。

图2 同步系统硬件电路框图
2 硬件实现及性能分析
根据上述方案设计的时间同步模块输出10MHz的同步信号及1 pps信号,状态监测区可监测是否锁定卫星信号,待卫星信号锁定成功后模块可正常工作。
对时间同步模块进行测量时,选用Pendulum公司的CNT-90频率计,控制面板如图3所示。其频率范围最高可达60 GHz,频率测量分辨率为12 bit/s,显示位数最多为14 bit,满足测试精度要求。该型号频率计可通过USB接口或GPIB接口与计算机连接,将测量数据上传,便于进一步计算。
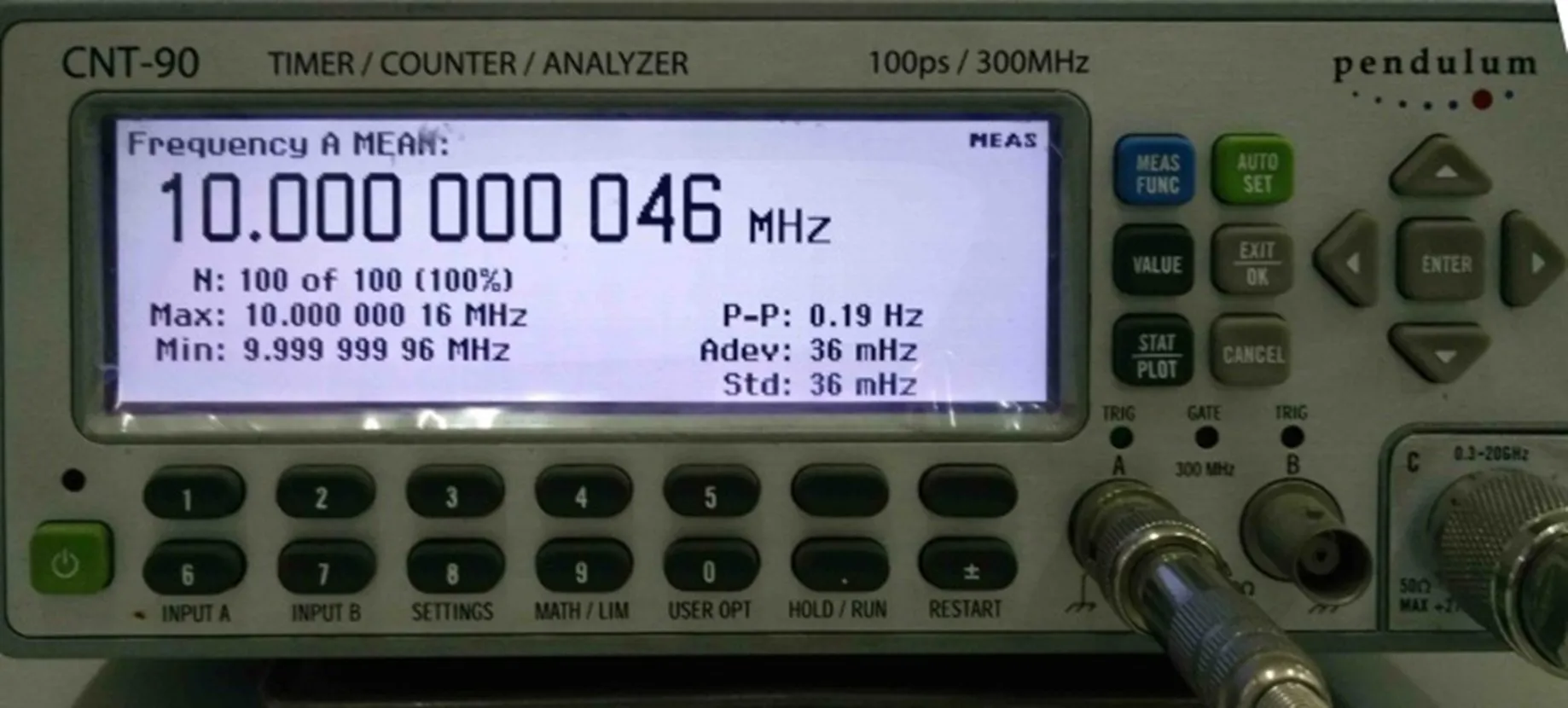
图3 CNT-90控制面板
衡量晶振性能的主要指标包括稳定度和准确性等[14]。频率稳定度是用来在时域描述原子钟输出信号频率受噪声影响起伏的大小,最为常用的指标是阿伦方差[15]。频率准确度定义为输出频率的实际值与标称值的相对偏差[16]。为衡量时间同步系统性能,选用Time View软件计算测量数据的统计特性。Time View软件可以达到10 ns的采样间隔,能够计算出阿伦方差等统计量,准确反映时间同步系统的准确度和稳定度。
实验中,为准确评估时间同步模块长时间和短时间的性能,选取采样间隔分别为1μs及1 s。作为比对,选取同样型号的晶振但不采用卫星授时进行校准,分析统计特性。对设备进行预热后,在相同环境下进行测量,结果如图4所示。


图4 时间同步模块测量结果
有卫星授时进行校准时:当采样间隔为1μs,测得方差为2.866 924 742 987 k Hz,频率范围为9.999 016 763 352~10.001 883 688 09MHz,均值为10.000 295 834 7MHz。当采样间隔为1 s,测得方差为2.692 369 744 182MHz,频率范围为10.000 000 026 96~10.000 000 029 65MHz,均值为10.000 000 028 43MHz。
无卫星授时进行校准时:当采样间隔为1μs,测得方差为2.091 790 451 983 k Hz,频率范围为9.999 250 056 246~10.001 341 846 7MHz,均值为10.000 217 824 47MHz。当采样间隔为1 s,测得方差为238.909 596 644 3 Hz,频率范围为9.999 761 724 797~10.000 000 634 39MHz,均值为9.999 951 246 677MHz。
由以上4组数据可以看出,由于采用了卫星授时对晶振进行校准,同步模块长时稳定性明显优于晶振输出频率,频率准确性提高3个数量级。根据均值及频率范围估算可知,时间同步模块授时的精度达到了纳秒级。由于卫星授时每秒进行一次校准,二者短时稳定性和准确性相差不大。
对于空-地双基地雷达,时间同步精度达到脉冲宽度的几分之一即可满足雷达信号处理的要求。对于采用脉冲压缩技术的雷达,有效脉宽为信号带宽的倒数,如对于带宽为40MHz的雷达,其有效脉宽约为25 ns。纳秒级的同步精度高于这一指标要求。因此,可以得出结论,卫星校准技术解决了晶振累积误差较高的问题,提高了长时稳定性和准确性,能应用于空-地双基地雷达的时间同步。
3 结束语
相对于地基双基地雷达而言,发射机置于小型无人机上的战场侦察空-地双基地雷达有着更复杂的设计与考虑,对时间同步的要求更高,实现难度更大。本文通过分析各个同步方案的基本原理和特点,提出利用高稳晶振与卫星授时结合的方法对系统进行时间同步。硬件实验结果证明该方案能够显著提高晶振的稳定性和准确性,减小同步误差。在实际同步过程中,考虑到工作环境等因素,可能还需要多方面的测试与调整。
[1]刘继业,陈西宏,刘强,等.国外双(多)基地雷达发展现状及关键技术分析[J].飞航导弹,2013(6):54-59.
[2]宋瑶.空地双基地雷达总体设计及空间同步研究[D].石家庄:军械工程学院,2014.
[3]马彦恒,宋瑶,董健.空地双基地雷达空间同步研究[J].雷达科学与技术,2015,13(1):65-69.MA Yanheng,SONG Yao,DONG Jian.Research on Spatial Synchronization in Air-Ground Bistatic Radar[J].Radar Science and Technology,2015,13(1):65-69.(in Chinese)
[4]王凌.时间基准及其在雷达装备中的应用要求[J].雷达与对抗,2014,34(4):13-15.
[5]陈伯孝,朱旭花,张守宏.运动平台上多基地雷达时间同步技术[J].系统工程与电子技术,2005,27(10):1734-1737.
[6]刘继业,陈西宏,刘强,等.一种双基地雷达时间同步的新方法[J].电光与控制,2014,21(4):10-14.
[7]蔡欣荣,司娜.基于GPS和短波的高精度时钟系统研究与设计[J].计算机测量与控制,2014,22(10):3290-3292,3308.
[8]黄翔,江道灼.GPS同步时钟的高精度守时方案[J].电力系统自动化,2010,34(18):74-77.
[9]唐洪,单庆晓,何琴.基于PI调节的压控晶振驯服系统的设计与实现[J].测试技术学报,2011,25(2):128-132.
[10]李嘉诚,马彦恒,董健,等.小型无人机载战场侦察雷达关键技术研究[J].飞航导弹,2015(8):37-41.[11]邓伟.基于GPS时钟同步系统的实现与应用[D].北京:北京邮电大学,2015.
[12]华云松,陈登科.北斗授时在同步数据采集仪中的应用[J].信息技术,2015(1):198-201,204.
[13]单庆晓,杨俊.卫星驯服时钟系统的新进展[J].测试技术学报,2009,23(5):396-401.
[14]刘娅,李孝辉,唐升,等.多台原子钟性能在线监测方法研究[J].仪器仪表学报,2013,34(10):2177-2183.
[15]RILEY W J.Techniques for Frequency Stability Analysis[C]∥IEEE International Frequency Control Symposium,Tampa,FL:IEEE,2003:1-80.
[16]宋鹏飞,王厚军,曾浩.高速深存储数据采集系统研究与设计[J].仪器仪表学报,2011,32(4):903-912.