非均匀场景下的协作定位基本限的研究
2015-12-15范馨月王慧敏
范馨月,王慧敏,周 非
(重庆邮电大学移动通信技术重庆市重点实验室,重庆400065)
0 引言
传统定位中,未知节点的定位需要至少3个不同的信标节点。例如,全球定位系统(global positioning system,GPS)[1]对信标节点的个数有严格要求,同时存在GPS接收机成本高、恶劣环境受限等问题。因此,基础设施布置有限的恶劣环境下的精确定位问题一直备受关注。近几年,协作定位[2-4]得到了国内外广泛关注。协作网络中含有2种节点:一种是位置已知的信标节点,另一种是不含位置信息的未知节点。此网络通过信标节点获取部分未知节点的位置信息,再由已获得位置信息的节点通过协作去定位其他未知节点,不断地延伸能感知的外界环境区域。由于传统的、无线定位方法的定位信息只是利用已知信标节点的位置、角度等信息,这导致信标节点布置有限时无法满足定位性能要求,而协作定位在利用已知信标节点的位置、角度等信息基础上还利用了任意2个未知节点之间的信息数据,不仅解决了不在信标节点覆盖范围内的未知节点的定位问题,而且提高了所有未知节点的位置估计的准确度和鲁棒性。
协作定位在搜索与营救场景中的应用具有很强的实用价值。在现实火灾、地震或其他紧急场景中,由于火势、障碍物、复杂的地形环境的影响,被困人员通常无法确定位置并且很难找到出路,这样直接影响了存活的几率。如果考虑协作,被困人员(即未知节点)在不能获得消防人员或固定信标节点的测距信息的情况下,可以通过被困人员之间的协作功能来实现有效的自身定位,这样就可以提高网络中定位信息的利用率,从而提高逃生率。
定位精度下界可以作为定位精度高低的性能基准。定位精度基本限的研究中,Jun Wang等给出了基于混合接收信号强度(received-signal-strength,RSS)[5]定位方法和到达方向(direction-of-arrival,DOA)[6]定位方法的克拉美罗界(cramer-rao bound,CRB)[7],但是文献没有采用协作的思想。作者Yuan Shen提出了基于到达时间(time-of-arrival,TOA)[8]定位方法的协作定位精度下界的研究[9],但目前只涉及均匀场景下的协作定位精度分析。众所周知实际场景中未知节点的分布受环境的影响,通常不是均匀分布的。例如很多大型商场建筑中间区域镂空,商场中的人集中在四周的卖场区域。实际搜索与营救时的定位问题在不少文献中被提出,但并未考虑被困人员之间的相互协作[10-11]。基于此,将被困人员之间赋予协作能力,能够充分利用定位信息从而提高定位精度。本文的主要贡献是将协作思想运用于实际搜索与营救场景,并将协作定位精度基本限作为参考指标,针对商场、居民楼等未知节点非均匀分布的实际场景,依据移动信标节点的不同位置对定位精度所产生的影响推断出实际场景下信标节点的布置,使定位效果最优化并且成本最低化。
本文首先描述了协作定位系统模型,运用等效费歇尔信息矩阵(equivalent fisher information matrix,EFIM)计算得出协作定位精度的基本限,即平方位置误差界(squared position error bound,SPEB);然后将协作定位模式运用在实际场景中,分析信标节点的不同布置对SPEB的影响。仿真结果表明,实际场景中被困人员之间的协作可以降低SPEB,提高定位精度,同时实际场景下的信标节点的布置需要综合考虑建筑结构、成本、精度等因素。
1 协作定位系统参数模型
假定在无线网络中布置NU个未知节点和NB个信标节点,节点i接收到来自节点k的多径信号为

(1)式中:i∈A;k∈A∪B(A和B分别是未知节点和信标节点的集合);s(t)是发送的基带信号;n(t)表示独立高斯白噪声;Alik和τ分别表示信道系数和时延;Nik表示节点i到节点k的多径条数。则节点的位置和路径时延之间的关系为

(2)式中:c是信号的传播速度;(xi,yi)T是未知节点i的坐标;(xk,yk)T代表所有节点k的坐标;0是由非视距(non-line-of-sight,NLOS)传输引起的距离偏差,对于视距(line-of-sight,LOS)传输,0。引入以下未知参数矢量代表未知节点i的位置,并且,θij表示未知节点i接收到信标节点j的距离偏差和振幅系数组成的矢量。表示未知节点i接收到其他未知节点m的距离偏差和振幅系数组成的矢量。
2 费歇尔信息矩阵与平方位置误差界
2.1 平方位置误差界
在观测时间[0To)内,r=[r1r2…rNU]T,r是接收波r(t)的矢量形式,可表示为ri=[ri,1…

(3)式中,Jη是η的费歇尔信息矩阵(fisher information matrix,FIM)。位置估计满足

则SPEB定义为

(5)式中tr{·}是矩阵的迹。
2.2 等效费歇尔信息矩阵
观测矢量r和参数矢量η的联合分布函数为

(6)式中,条件概率密度函数为
gi(ηi)是参数 ηi的先验概率密度函数。则 η的FIM为

将ln f(r,η)分解得
由公式(9)对数联合分布函数的公式可以得出定位信息由3部分组成,分别是来自信标节点的定位信息、来自协作的定位信息以及先验信息,则FIM为

(10)式中等式右边第3部分可以写为

(10)-(11)式中:JBE和JU分别是来自信标节点和协作节点的位置信息;ΓBE和ΓU是分别与θi和先验信息对应的FIM;ΓP是未知节点位置Pi的先验信息的FIM。
等效费歇尔信息矩阵是维数小于原始费歇尔信息矩阵,但是保持了计算CRB所有有用信息的矩阵。假设原始费歇尔信息矩阵为其逆矩阵为,则

Je是一个n×n的半正定矩阵,可以用等效费歇尔信息矩阵简化各个节点的定位信息,然后再把各个节点的等效费歇尔信息矩阵加起来求得EFIM。
来自信标节点的FIM可以表示为对角矩阵

diag{JBE,1+ΓBE,1,…,JBE,NU+ΓBE,NU},这里每个分块矩阵{JBE,i+ΓBE,i}可以被简化为维数是2×2的EFIM,那么整个2NU×2NU的EFIM为,其中

(14)式中:系数αj,i为非负的标量,是来自信标节点的测距信息强度;,是来自信标节点的测距信息矩阵,qj,i是未知节点i到信标节点j的角度;ηi和 μi是的特征值;为角度的旋转矩阵。
来自未知节点之间的协作定位信息可以表示为

(15)式中,Ci,n是协作节点i和n的协作信息的2×2的EFIM,其中

(16)式中:αi,n是来自协作的测距信息系数;Qi,n是来自协作的测距信息矩阵;νi,n是Ci,n的特征值,同时代表协作节点i和协作节点n之间的协作信息强度。因此,协作定位的整体EFIM为

则SPEB与EFIM之间的关系为

通过以上理论分析,可以看出等效费歇尔信息保留了计算平方位置误差界的位置矢量P,其优势在于缩小了计算的复杂度,每个未知节点的信息量由原来的NU×NU降低为2×2的低维度,这样所有节点的维数就由原来的(NU×NU)×(NU×NU)改为2NU×2NU。
3 仿真结果比较与分析
模拟实际火灾场景的协作定位系统示意图如图1所示,图1中被困人员即协作网络中的未知节点,部分被困人员无法获取来自固定信标节点的定位信息,但是可以通过被困人员之间的协作得到额外的来自被困人员之间的定位信息,从而提高定位精度。
被困人员在整个参考区域内是非均匀分布的,信标节点在镂空区的4个顶点并沿着虚线向区域顶点移动,信标节点每到一个位置,测一次SPEB值,分析比较不同位置得到的SPEB值,进而确定信标节点的最优位置。
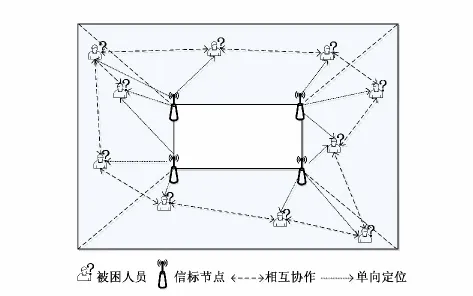
图1 实际场景中的协作系统示意图Fig.1 Cooperative system in actual scene
3.1 影响SPEB的关键参数
仿真首先将所有的信标节点的等效费歇尔信息矩阵的特征值信息设为η=1,μ=1,β=0或η=2,μ=1,β=0,以及协作节点所有的协作信息强度统一假设为ν=0.3或ν=0.7。如图2所示可以看出,随着协作节点个数增多,SPEB下降,定位精度提高;随着协作信息强度ν的增加,SPEB下降,即协作节点之间越强的协作,获得到越好的定位性能。图2以后的仿真,采用协作信息强度 νi,n∝1/d2i,n进行仿真分析。

图2 SPEB随协作信息强度变化的关系图Fig.2 Relationship between ν and SPEB
3.2 实际场景1
考虑不规则场景,如图3所示为实际场景1的节点分布,不规则十二边形实线区域为仿真场景区域,考虑很多商场等类似建筑中间为镂空区域,这里假设中间虚线方形区域为镂空,即方形区域内无人员分布。被困人员即未知节点在整个十二边形实线参考区域内是非均匀分布的。4种信标节点位置的布置方式有:布置1,三角形图标(信标节点个数为4);布置2,方形图标(信标节点个数为4);布置3,三角形图标和正方形图标(信标节点个数为8);布置4,圆形和正方形(信标节点个数为8)。用d标注信标节点位置与中心点位置间的关系。假设考虑未知节点个数为40,且随机分布在非镂空区域(即在不规则参考区域内是非均匀分布的),并且被困人员之间可以协作。

图3 实际场景1的节点分布Fig.3 Distribution of nodes in scene 1
图4为d=6时采用蒙特-卡罗法得到的被困人员数量与SPEB之间的关系图。

图4 场景1下SPEB与被困人员个数的关系Fig.4 SPEB with respect to the number of trapped people in scene 1
由图4可以看出以下几点。
1)随着横坐标增大,无协作情形下每种信标节点分布模式的SPEB值均无变化,而协作情形下的4种信标节点布置方式的平方位置误差界都逐渐下降,定位精度越来越好,可以看出被困人员之间的协作可以提高定位精度。
2)纵向比较布置1-4,可以看出随着信标节点个数的增多,平方位置误差界下降,精度越来越好。
3)比较布置1-4,可以看出,在d=6时布置1拥有比布置2更低的SPEB,即更好的定位精度;同样,布置3拥有比布置4更低的SPEB。这是由于在4个信标节点情况下,布置1中的信标节点覆盖区域中所含的被困人员数比布置2中的信标节点覆盖区域中所含的被困人员数多;同样,在8个信标节点的情况下,布置3中的信标节点覆盖区域要比布置4中的信标节点覆盖区域好。
图5为图3的仿真环境基础上通过蒙特-卡罗法得到的SPEB随d变换的关系。

图5 场景1下SPEB与d的关系曲线Fig.5 SPEB with respect to d in scene 1
据仿真图5可以看出以下几点。
1)对于所有信标节点的布置来说,随着d的增大,SPEB先减小后增大。由此可以看出实际非均匀场景中,SPEB并非随着d线性变化,而是存在一个合适的位置使得定位精度达到最优。所以信标节点的布置需要考虑一个最佳距离。这一现象在理论上也是可以推断的,因为d太小,信标节点覆盖到未知节点的范围狭窄,定位效果差,d逐渐增大会提高定位精度,但同时越远的距离也意味着越大的路径损耗,距离增大到一定程度时,定位效果又开始变差。
2)当d=0时,定位误差很大,这是由于对于每一个未知节点来讲,4个或8个信标节点都是来自同一个方向,即获得定位信息少,导致了定位精度变差。所以实际场景中的信标节点的布置要分散开来,集中分布的信标节点会导致定位信息利用率变低,从而浪费资源。
3)由图5可以看出,两种8个信标节点的布置定位效果都要比4个的布置情况更优。所以实际场景中信标节点的个数当然是越多越好,但是综合考虑成本问题,可以选择在规定误差范围内的最少信标节点布置个数。另外,比较布置1和布置2可以看出:当d<8(近似值,以下类似)时,布置1优于布置2;当d>8时,布置2优于布置1。4个信标节点布置的情形下,布置1大约在d=6时SPEB最低;d<9时,布置3优于布置4;d>9时,布置4优于布置3。8个信标节点布置的情形下,布置4在d=10时最优。由此可以看出实际场景布置中,若选定了信标节点的个数,布置节点的位置和距离要根据多次模拟才能综合得出最优布局。
3.3 实际场景2
和实际场景1类似,考虑不规则场景,如图6所示为实际场景2的节点分布。外围不规则九边形实线区域为所考虑的场景形状,中间三角黑色虚线围成的区域为镂空。同样,未知节点分布在周围3个区域,可见不规则九边形实线参考区域内未知节点分布是非均匀分布的。根据建筑形状,这里考虑3种信标节点的布置方式:布置1:三角形图标(信标节点个数为3);布置2:正方形图标(信标节点个数为3);布置3:三角形图标和方形图标(信标节点个数为6),所有信标节点的位置关系用图6中D表示。本次假设未知节点布置个数为30,且未知节点之间可以协作。
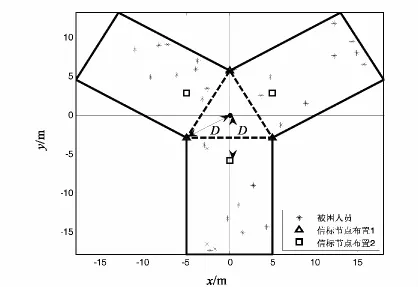
图6 实际场景2的节点分布Fig.6 Distribution of nodes in scene 2
图7同样采用蒙特-卡罗模拟法,其仿真结果表明:对于实际场景2来说,所有信标节点的布置仍是随着D的增大,SPEB先减小后增大;当D=0时,对于每个协作点来说,3个或6个信标节点都是来自同一个方向,即获得定位信息少,导致了大的SPEB值;且6个信标节点的布置要优于3个信标节点的布置;当D<14(约值,以下类似)时,布置1优于布置2,D>14时,布置2优于布置1。对于此模拟场景,若确定信标节点个数为3,且考虑信标节点布置在参考场景内时,最优布置为布置1,因为在D<14的整个区间内,布置1相较布置2来说,其SPEB值比较低。
分析比较实际场景1和实际场景2可以看出,由于建筑结构不同,选用的信标节点个数与布置方式也不同,因此信标节点的布置要考虑匹配场景的结构与形状,从而避免多余的开销,提高信标节点位置信息的利用率。
总之,布置信标节点要综合考虑实际场景、定位精度、成本等因素。根据不同的场景选择最有效的节点个数以及最优的布局,从而解决实际场景下的精确定位问题,提高搜索与营救的效率。该方法也适用于无固定信标节点布置的场景,给携带信标设备的消防员提供最优的参考信源位置,进而解决被困人员定位的问题。

图7 场景2下SPEB随D的变化Fig.7 SPEB with respect to D in scene 2
4 结束语
在协作定位模型的基础上分析了协作定位精度基本限问题,并通过等效费歇尔信息矩阵来计算SPEB。主要研究了实际搜索与营救系统场景中定位问题,为提高定位信息的利用率,我们将被困人员赋予协作能力。以SPEB作为协作定位精度性能的参考基准,考虑实际场景中未知节点分布不均匀的情况,仿真部分通过移动信标节点在不同位置得到的SPEB值,确定了信标节点的布局对定位精度下界的影响,并由此推出实际场景中信标节点布置的参考因素。
[1]潘延明,卢艳娥,骆艳卜,等.稳健的GPS干扰抑制方案研究[J].重庆邮电大学学报:自然科学版,2012,24(3):330-334.
PAN Yanming,LU Yan’e,LUO Yanbo,et al.A research of robust GPS anti-jamming scheme[J].Journal of Chongqing University of Posts and Telecommunications:Natural Science Edition,2012,24(3):330-334.
[2]PATWARI N,ASH J N,KYPEROUNTAS S,et al.Locating the nodes:cooperative localization in wireless sensor networks[J].IEEE Signal Processing Magazine,2005,22(4):54-69.
[3]WANG Jun,CABRIC D.A Cooperative DOA-based Algorithm for Localization of Multiple Primary-Users in Cognitive Radio Networks[C]//Global Communications Conference(GLOBECOM).Anaheim:IEEE,2012:1266-1270.
[4]MARIANI A,KANDEEPAN S,GIORGETTI A,et al.Cooperative Weighted Centroid Localization for Cognitive Radio Networks[C]//International Symposium on Communications and Information Technologies(ISCIT).Gold Coast,QLD:IEEE,2012:459-464.
[5]ZANELLA A,BARDELLA A.RSS-Based Ranging by Multichannel RSS Averaging[J].IEEE Wireless Communications Letters,2014,3(1):10-13.
[6]HON T H.Direction-of-arrival(DOA)estimation in the presence of array signal coupling[C]//International Conference on Information,Communications and Signal Processing(ICICS).Singapore:IEEE,2011:1-4.
[7]WANG Jun,CHEN Jianshu,DANIJELA C.Cramer-Rao Bounds for Joint RSS/DoA-Based Primary-User Localization in Cognitive Radio Networks[J].IEEE Transactions on Wireless Communications,2013,12(3):1363-1375.
[8]周非,陈庭盈,范馨月.基于AOA-TOA重构的单站定位算法[J].重庆邮电大学学报:自然科学版,2012,24(2):222-226.
ZHOU Fei,CHEN Tingying,FAN Xinyue.Algorithm of single station location based on AOA-TOA reconstruction[J].Journal of Chongqing University of Posts and Telecommunications:Natural Science Edition,2012,24(2):222-226.
[9]WIN M Z,SHEN Yuan,WYMEERSCH H.On the Position Error Bound in Cooperative Networks:A Geometric Approach[C]//International Symposium on Spread Spectrum Techniques and Applications.Bologna,Italy:IEEE,2008:637-643.
[10]LI Shen,ZHAN Andong,WU Xiaobing,et al.ERN:Emergence Rescue Navigation with Wireless Sensor Networks[C]//International Conference on Parallel and Distributed Systems(ICPADS).Shenzhen,China:IEEE,2009:361-368.
[11]BACIM F,RAGAN E D,STINSON C,et al.Collaborative
Navigation in Virtual Search and Rescue[C]//IEEE Symposium on 3D User Interfaces(3DUI).Costa Mesa,CA:IEEE,2012:187-188.
