IMM迭代无迹Kalman 粒子滤波目标跟踪算法
2015-12-15苗少帅
苗少帅,周 峰
(空军工程大学防空反导学院,陕西西安710051)
0 引言
对机动式再入目标进行实时精确的跟踪是防空反导领域中的关键问题,同时也是目前反导中亟待解决的技术之一。建立准确的机动模型是实现稳定跟踪的前提。目前常用的有Singer模型、Jerk模型、“当前统计”模型、多模型以及交互式多模型[1]。其中交互式多模型在对复杂运动目标跟踪时具有良好的效果。文献[2]采用交互式多模型(interactive multiple model,IMM)滤波算法实现对机动目标的跟踪。文献[3]通过IMM滤波算法实现了对多级助推弹道导弹主动段的跟踪,但受限于各模型的滤波算法性能,IMM滤波算法针对非线性运动程度高的弹道目标而言,跟踪效果不尽如人意。
IMM算法滤波采用卡尔曼滤波算法,而卡尔曼滤波算法针对高度非线性的机动再入目标误差较大。粒子滤波器以其解决非线性、非高斯问题能力强的优势在目标跟踪领域中占得一席之地。文献[4-6]实现将交互式多模型粒子滤波(interactive multiple model particle filter,IMMPF)算法应用于机动目标的跟踪,但由于标准粒子滤波算法存在粒子退化的问题,降低了IMMPF算法跟踪性能。文献[7]针对粒子滤波算法粒子退化的问题,提出了IMM迭代扩展Kalman粒子滤波算法,但该算法无法避免求雅可比矩阵带来的计算量问题。基于此,文献[8]提出了迭代无迹Kalman粒子滤波算法,在提高算法精度的同时又可降低算法的计算量。
本文结合IMM和迭代无迹Kalman粒子滤波各自的优势,提出IMM迭代无迹Kalman粒子滤波跟踪算法。IMM各模型滤波采用迭代无迹Kalman粒子滤波算法生成粒子滤波的重要性分布,从而提高采样质量,进而达到改善算法性能的目的。仿真结果表明,该算法性能优于IMMPF。
1 模型的建立
1.1 机动式再入目标气动力模型
机动式再入目标与弹道式再入目标受力方面最大的不同就是:目标不仅受到空气阻力和重力作用,由于机动,还有升力和诱导阻力。为了研究方便,在此忽略向心加速度,科氏加速度和旋转等因素的影响。目标受力如图1所示。

图1 机动式再入目标受力示意图Fig.1 Force diagram of maneuvering reentry target
在雷达站直角坐标系下建立机动再入目标运动模型。机动再入目标的状态向量有位置向量(x,y,z)、速度向量(vx,vy,vz)和3个气动力系数 αD,αS和αL。因此,得出机动再入目标的状态向量为

详细气动力模型见文献[10]。然而在实际情况下,上面3个气动力参数未知,且目标的机动策略也不清楚。动力学模型往往精度不高,采用运动学模型逼近动力学模型,达到对再入目标运动特性描述更为准确的目的就成为解决方法之一。
1.2 IMM跟踪模型
IMM模型的状态方程和观测方程分别为

(2)-(3)式中:xk,i表示模型i(i=1,2,…,M)下目标的状态向量;zk,i为观测向量;wk,i为过程噪声;vk为观测噪声。wk,i和vk之间相互独立且为零均值高斯白噪声向量,协方差矩阵分别为Q(k)和R(k)。从模型i转移到模型j的转移概率为Ptij,表示为

结合初始状态x0、各模型初始概率u和观测向量zk就可以估算出目标的运动状态xk。
2 迭代无迹Kalman粒子滤波
无迹Kalman滤波是一种有效的非线性滤波算法,能通过一系列选取的δ采样点逼近概率密度函数。为了更好地产生接近于真实的后验概率分布,利用当前观测信息通过迭代的方法对无迹Kalman进行改进,形成迭代无迹Kalman滤波(iterated UKF)[9,11]。利用IUKF这种优势来产生粒子滤波的重要性密度函数,形成迭代无迹Kalman粒子滤波(PF-IUKF)。接下来将算法步骤作一简单推导。
1)初始化。k=0时刻,从先验概率密度函数中随机抽取N个采样点x0,i,i=1,2,…,N,并计算每个粒子权值w0,i=p(z0|x0,i)。
2)预测修正。在各个时刻k≥1,用IUKF对各个粒子进行修正,预测修正过程如下。
①计算2n+1个δ点及其权值。

②通过离散系统状态方程xk+1=fk(xk)+wk传递δ点。

③ 预测状态x^ik|k-1,i的均值和协方差估计。
(9)-(10)中:QR{}表示矩阵的QR分解;cholupdate{}表示矩阵Cholesky分解的秩1修正。
④通过离散系统量测方程zk,i=hk(xk)+vk传递δ点得到量测预测。

⑤利用IKF的思想对预测量测的均值和协方差进行估计。

⑥从重要性密度函数中抽取样本。

⑦对样本各点计算重要性权值。

⑧如果Neff<Nth,令并且进行重采样。
3)输出。

3 IMM迭代无迹Kalman粒子滤波算法
为了提高对机动再入式弹道目标的跟踪精度,研究人员通常从两方面着手:一是建立准确的机动模型;二是采用精度高的滤波算法。本文在前人思想的启发下,在建立运动模型方面,引入IMM;在对多模型各个子滤波器滤波过程中采用精度更高且计算量较小的迭代无迹Kalman粒子滤波算法。在这两方面的努力之下,本文提出了IMM迭代无迹Kalman粒子滤波算法。接下来将该算法推导如下。
算法步骤分为4个步骤:输入交互、各子滤波器滤波计算、模型概率更新和输出交互。

2)各子滤波器滤波计算。利用上节的迭代无迹Kalman粒子滤波算法,得到各滤波器的输出为
3)模型概率更新。模型j的概率更新为


4 仿真结果与分析

图2 跟踪轨迹Fig.2 Trajectory tracking

图3 X方向误差Fig.3 X direction error
从图2可以看出,目标在整个运动期间,本文所提的算法都能很好地对目标进行跟踪,而原算法IMMPF跟踪效果相对较差。并且从图3—5可以更清晰地看到,本文所提的算法整体误差相对于原算法较小,尤其当目标进行机动时,原算法会有比较大的震荡,而新算法一直比较平稳。这主要是由于新算法在粒子滤波过程中采用迭代无迹Kalman产生重要性密度函数,由于融入了最新的观测信息,使得粒子分布更接近于后验概率分布。
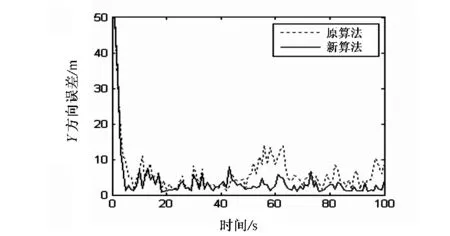
图4 Y方向误差Fig.4 Y direction error

图5 距离误差Fig.5 Distance error

表1 2种算法平均运行时间Tab.1 Average running time of two algorithms
从表1可以看出,本文所提算法在运行时间方面也优于原算法IMMPF。这主要因为本文所提算法在交互式多模型滤波时采用了改进的粒子滤波器,其能够采用较少的粒子近似后验概率分布,很大程度地克服了传统粒子滤波计算量大的问题,使得本文算法能在保证跟踪精度的同时,缩短响应时间,提高了算法的实时性能力。
5 结论
本文结合交互式多模型和迭代无迹Kalman粒子滤波各自的优势,提出了IMM迭代无迹Kalman粒子滤波跟踪算法,并将其应用到对机动再入目标的跟踪问题中。仿真结果显示,本文所提算法跟踪精度要高于原始的IMMPF算法,稳定性也高于IMMPF,而且计算量还要小于IMMPF。但同时也可以看出,虽然本文所提算法运行时间明显优于IMMPF,但对于实时性要求高的战场环境来说还显得能力不足。今后的研究方向更多地将集中在如何精确地描述目标的机动与提高算法的实时性。
[1]周宏仁,敬忠良.机动目标跟踪[M].北京:国防工业出版社,1991:10-208.
ZHOU Hongren,JING Zhongliang.Maneuvering Target Tracking[M].Beijing:National Defense Industry Press,1991:10-208.
[2]孙粲.机动目标跟踪交互式多模型算法研究[D].济南:山东大学,2013.
SUN Can.Research on Maneuvering Target Tracking Based on Interacting Multiple Model algorithm[D].Jinan:Shandong university,2013.
[3]MORELANDE M R,CHALLA S.Maneuvering target tracking in clutter using particle filters[J].IEEE Transactions on Aerospace and Electronic Systems,2005,41(1):252-270.
[4]陈欢欢,陶建锋,周峰,等.基于EPF-IMM算法的高机动目标跟踪研究[J].电光与控制,2010,17(10):17-19.
CHEN Huanhuan,TAO Jianfeng,ZHOU Feng,et al.Tracking of High-Maneuvering Target Based on EPF-IMM Algorithm[J].Electronics Optics&Control,2010,17(10):17-19.
[5]孙杰,江朝抒.基于卷积粒子滤波的交互式多模型算法[J].系统工程与电子技术,2011,33(5):992-995.
SUN Jie,JIANG Chaoshu.Interacting multiple model algorithm based on convolution particle filter[J].Systems Engineering and Electronics,2011,33(5):992-995.
[6]吕铁军,蒋宏,梁国威,等.改进的交互式多模型粒子滤波目标跟踪算法[J].弹箭与制导学报,2013,33(3):9-11.
LV Tiejun,JIANG Hong,LIANG Guowei,et al.A target tracking algorithm Based on Improved Interacting Multiple Model particle filter[J].Journal of Projectiles,Rockets,Missiles and Guidance,2013,33(3):9-11.
[7]张俊根,姬红兵.IMM迭代扩展卡尔曼粒子滤波跟踪算法[J].电子与信息学报,2010,32(5):1116-1120.
ZHANG Jungen,JI Hongbing.IMM Iterated Extended Kalman Particle Filter Based Target Tracking[J].Journal of Electronics&Information Technology,2010,32(5):1116-1120.
[8]郭文艳,韩崇昭,雷明.迭代无迹Kalman粒子滤波的建议分布[J].清华大学学报:自然科学版,2007,47(S2):1866-1869.
GUO Wenyan,HAN Chongzhao,LEI Ming.Particle distribution control for an iterated unscented Kalman particle filter[J].Journal of Tsinghua University:Science and Technology,2007,47(S2):1866-1869.
[9]程水英,余莉.迭代无味卡尔曼滤波器的算法实现与应用评价[J].系统工程与电子技术,2011,33(11):2546-2553.
CHENG Shuiying,YU Li.Algorithm realization and its application evaluation of the iterated unscented Kalman filter[J].Systems Engineering and Electronics,2011,33(11):2546-2553.
[10]赵艳丽.弹道导弹雷达跟踪与识别研究[D].长沙:国防科学技术大学,2007.
ZHAO Yanli.Study on Radar Tracking and Discrimination for Ballistic Missiles[D].Changsha:National University of Defense Technology,2007.
[11]郭平平,贾建芳.基于IUKF的非线性状态估计[J].机械工程与自动化,2010,(5):7-13.
GUO Pingping,JIA Jianfang.Nonlinear State Estimation Based on Iterated Unscented Kalman Filter[J].Mechanical Engineering&Automatiion,2010,(5):7-13.
