基于FPGA的旋转反射镜运动控制器设计
2015-11-30王一程陶会锋
王一程,唐 聪,陶会锋,郑 超
(红外与低温等离子体安徽省重点实验室; 脉冲功率激光技术国家重点实验室; 电子工程学院,安徽合肥,230037)
基于FPGA的旋转反射镜运动控制器设计
王一程,唐 聪,陶会锋,郑 超
(红外与低温等离子体安徽省重点实验室; 脉冲功率激光技术国家重点实验室; 电子工程学院,安徽合肥,230037)
以一种用于光束指向控制的旋转反射镜为背景,设计了一种基于FPGA芯片的运动控制器,在一块FPGA芯片上完成控制算法实现、传感器信号处理、脉宽调制方波生成、串口收发等功能。实验结果表明这种运动控制器具有响应速度快,可灵活配置的特点,能为类似产品的设计开发提供借鉴。
FPGA;运动控制器;旋转反射镜
0 引言
光束指向的控制可分为两种方式,一是通过直接控制照射光源本身的角度来改变光束指向,二是在光源前面加装一个平面反射镜,通过控制反射镜的角度来改变反射光束指向。前者用于光源的体积和重量不大且光源本身具有一定抗振动性能的情况,如舞台灯光;而如果光源体积或重量较大,或者不能在频繁振动的情况下工作,则必须采用第二种方式,例如大功率氙灯。在用于反射大功率光源的反射镜控制系统中,运动控制器是一个关键的部件,它的主要任务是将上位机发送的反射镜角度设定信号进行处理,得到的控制信号经放大后驱动两自由度旋转反射镜转动,实现对角度设定信号的精确和快速跟随。
在以往的应用中,运动控制器大多以单片机或DSP为核心处理器,这种方案的优点是灵活,编程简单。但也存在不少的弊端,它的灵活性常常是以牺牲实时性为代价的,在程序复杂度很高的情况下实现实时处理成本较高;而且它属于软处理技术,无法达到专用集成电路那样高性能、高可靠、高一致性[1]。
FPGA(现场可编程门阵列)既有门阵列的高逻辑密度和通用性,又有可编程逻辑器件的用户可编程特性,在实现小型化、集成化和高可靠性的同时,减小了设计风险,降低了成本,而且FPGA能为设计者提供比DSP更高的并行性。因此,在国外,越来越多将运动控制方案中的处理部分交给了FPGA,甚至独立的FPGA来专门处理运动控制[2]。本文重点讨论使用FPGA器件来实现两自由度反射镜运动控制的方法。
1 系统组成及原理
旋转反射镜的结构如图1所示,具有方位和俯仰两个旋转自由度,由方位/俯仰电机、方位/俯仰光电编码器、方位/俯仰测试机、反射镜和机架等组成。
方位和俯仰这两个角度的控制在结构上基本相同,都是使用直流力矩电机同轴直接驱动,采用PWM(脉宽调制)方式进行功率放大,角位置环传感器采用增量式光电编码器,角速度环传感器采用直流测速发电机。从控制原理角度来看,方位和俯仰的闭环控制回路结构基本相同,都属于典型的带有速度回路的双闭环单输入单输出位置随动系统[3],因此下文均以方位轴的控制为例进行介绍。
2 系统硬件设计

图1 旋转反射镜组成结构图
运动控制器的功能为根据上位机或键盘的指令来驱动力矩电机带动反射镜转动。FPGA是运动控制器的主控芯片,主要完成以下功能:传感器信号的采集和处理、控制算法实现、PWM方波输出、与上位机的串口通信、响应控制键盘信号和LCD显示等,如图2所示。
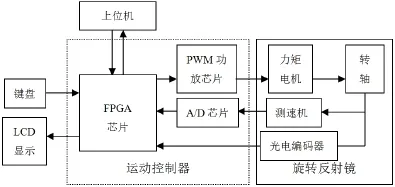
图2 运动控制器硬件结构框图
增量式光电编码器一般输出A、B、Z三相信号,输出电平为5V,需经过电阻分压方可接入FPGA。
测速机输出的是幅值与转速成正比的电压信号,电压的正负对应转向的正反。选用AD574A型双极输入的12位精度模数转换芯片,将测速机输出的模拟信号转换成数字信号后送入FPGA。
功率放大采用H 双极模式可逆PWM芯片L298。L298内含两个H桥的全桥式驱动器,可以用来驱动直流电动机和步进电动机。采用标准逻辑电平信号控制,FPGA可以直接与之连接进行控制,但考虑到驱动电路中噪声较大,最好在FPGA和L298之间通过高速光耦隔离芯片连接。
FPGA与上位机通过RS232串口连接,上位机的RS232串口信号经电平转换芯片后接入FPGA。
3 系统软件设计
在Quartus II环境下采用VHDL语言开发完成的FPGA配置程序。主控芯片FPGA的程序可分为以下几个功能模块:光电编码器信号处理、测速机信号处理,控制算法实现,PWM生成,串口通信等。
3.1 光电编码器信号处理
增量式光电编码器的线数是其主要技术指标之一,如10000线的光电编码器,其角度测量分辨率为360°/10000=0.036°。FPGA内部可用可逆计数器来对A或B相的脉冲进行计数,经换算得到角位置信号。为了提高角度分辨率并避免换向误码,在将A、B相信号送入可逆计数器前先进行电子倍频。经过4倍频后,角度分辨率提高到0.009°。同时,为了确定转动方向,还需对A、B相信号进行鉴相,即通过鉴别A、B两路信号的相位关系来确定转向。
3.2 测速机信号处理
FPGA负责控制AD574A芯片进行转换和读取数据,用FPGA的一个IO口输出1kHz的脉冲控制AD574A的R/nC脚,则每毫秒进行一次A/D转换。同时用另一个IO判断AD574A的STS脚的电平,若为低电平则说明转换已完成,此时FPGA将AD574A的12位数据读入内部寄存器缓存。为了降低模拟信号附带了噪声信号,FPGA要对速度信号进行数字滤波,可采用平均滤波的方法实现。

图 3 控制闭环回路组成框图
3.3 控制算法实现
闭环控制回路的结构如图3所示,包含内外两个回路。输入为上位机通过串口向FPGA发送的角位置设定信号(Position Set),输出为反射镜的角位置θ,受控对象包括功放电路、力矩电机、以及反射镜和转轴等运动部件。Gpc表示位置环调节器,Gnc表示速度环调节器,Go表示受控对象;Encoder表示光电编码器,Tachometer表示测速机,AD表示模式转换芯片;1/s表示积分环节,n表示转速。
内环的速度环调节器Gnc采用PID调节,外环的位置环调节器采用PI调节。因此,FPGA内部需配置乘法器、加法器、积分器和微分器等模块。
该部分主要是进行算法设计,可以借助DSP Builder来自动完成大部分的设计过程和仿真[4],直至把编译生成的配置文件下载到FPGA芯片里。
3.4 PWM生成
速度环调节器Gnc的计算结果为速度设定信号Sn,Sn可量化为N级。例如N=2048,则Sn=2048对应最高转速,此时PWM模块输出高电平信号(即占空比为1);Sn=1024对应最高转速的一半,此时PWM模块输出占空比为50%的方波;Sn=1对应最低转速,此时PWM模块输出占空比为1/2048的方波;Sn=0表示停止,此时PWM模块输出低电平。另外,为了确定转向,Gnc还需给出一个转向信号至PWM模块。
3.5 串口通信
FPGA通过一个RS232串口与上位机通信。上位机要向FPGA发送数据(例如角位置设定信号、角速度设定参数、控制系统参数、限位参数等);同时FPGA向上位机回传系统状态、角位置反馈、角速度反馈等信号。为了使控制器具有良好的通用性,数据帧格式依据Pelco-D协议进行设计。由于传输的数据比较多而且很频繁,所以将比特率设置为115200。
4 实验结果
采用50MHz的系统时钟,FPGA能以每秒1000次的速度完成信号采集与处理、数字滤波、控制运算和控制信号输出的流程。占用的FPGA硬件资源约为3600个逻辑单元(logic cells),可选用Altera公司的Cyclone II系列芯片EP2C8T144C8实现。
5 结论
本文设计了一种以FPGA为核心处理器的旋转反射镜运动控制器。实验结果表明这种运动控制器响应速度快,且可通过编程灵活配置,该控制器的高速处理能力有助于提高光束指向控制系统的实时性。本设计能为类似产品的设计开发提供借鉴。
[1]王一程,汪海兵. 基于FPGA的光电跟踪控制系统设计[J].电光与控制,2009,16(3):54-57.
[2]冼 进.Verilog HDL数字控制系统设计实例 [M].北京,中国水利水电出版社,2007.
[3]李楷.小型光电跟踪系统设计[D]. 硕士学位论文,2003.
[4]任晓东,文 博.CPLD/FPGA高级应用开发指南[M].北京,电子工业出版社,2003.
Design of FPGA-based Motion Controller for Rotating mirror
Wang Yicheng,Tang Cong,Tao Huifeng,Zheng Chao
(Key Laboratory of Infrared and Low Temperature Plasma of Anhui Province; State Key Laboratory of Pulsed Power Laser Technology, Electronic Engineering Institute,Anhui Hefei,230037)
In the background of a rotating mirror used for beam pointing control,A FPGA-based motion controller was designed. Tasks such as implement of control arithmetic, processing of sensor signal, creating PWM wave and data transceiver by serial port were performed in a single FPGA chip. Experimental results show that the motion controller has the characteristics of fast response speed and flexible configuration, and this design can provide reference for the design of similar products.
FPGA; Motion Controller; Rotating Mirror
王一程(1983-),男,广西百色人,电子工程学院讲师,主要研究方向为ARM、FPGA嵌入式系统。
